2 - Kits pédagogiques
- 2-1 Fonctionnement des kits pédagogiques
- 2-2 Kit pédagogique n°1 - Poubelle à couvercle automatique
- Description du projet
- Modélisation en 3D du couvercle
- Utilisation de la découpe laser pour le mécanisme de la poubelle à couvercle automatique
- Fonctionnement et programmation des composants
- Assemblage et câblage de la poubelle à couvercle automatique
- Programmation de la poubelle à couvercle automatique
- 2-3 Kit pédagogique n°2
2-1 Fonctionnement des kits pédagogiques
Fonctionnement des kits pédagogiques
Qu'est ce qu'un kit pédagogique ?
Les kits pédagogiques sont des ensembles de matériel et de ressources conçus pour permettre la réalisation d’activités techniques en autonomie dans le cadre du Fablab.
Chaque kit comprend :
-Le matériel nécessaire à la réalisation de l’activité
-Une documentation associée (fiche projet, tutoriel, consignes)
-Éventuellement des fichiers numériques (modèles 3D, schémas, code)
Le fonctionnement repose sur une utilisation encadrée :
-L’enseignant référent assure la gestion et la distribution des kits sur site
-Les utilisateurs suivent la documentation fournie pour réaliser l’activité
-Le matériel est vérifié et remis en état après utilisation
Pourquoi utiliser des kits pédagogiques ?
L’objectif est de proposer des activités reproductibles, structurées et adaptées à un usage pédagogique, tout en garantissant l’autonomie des utilisateurs et la pérennité du matériel.
Comment demander des kits pédagogiques ?
Dans un premier temps, je vous invite à découvrir nos kits pédagogiques afin de déterminer celui qui vous intéresse.
Ensuite vous pouvez nous contacter à l'une des adresses e-mail suivantes :
- iha-fablab@unistra.fr (Secteur Nord-Alsace)
- contact@savoirs-vivants.fr (Secteur Nord-Alsace)
- msa-lab@unistra.fr (Autre)
2-2 Kit pédagogique n°1 - Poubelle à couvercle automatique
Description du projet
Introduction :
Pour ce cycle, nous allons réalisée une poubelle avec une ouverture de couvercle automatique.
Description des compétences visées :
Compétences techniques et mécaniques :
-
Conception mécanique : savoir imaginer et concevoir le mécanisme d'ouverture automatique du couvercle
-
Assemblage de composants : apprendre à manipuler et assembler les différentes parties (couvercle, axe, moteur, composants électroniques, etc.)
-
Choix des matériaux : identifier les matériaux adaptés au projet
Compétences en électronique :
-
Découverte et câblage de capteurs pour détecter une présence.
-
Découverte et câblage de servomoteur pour l'ouverture/fermeture du couvercle.
-
Savoir réaliser un schéma de câblage et connecter les composants sur une carte Arduino.
Compétences en programmation :
-
Programmation d'un microcontrôleur Arduino : écrire un code qui gère les capteurs, les délais, et l'action du moteur.
-
Logique conditionnelle : comprendre comment programmer des conditions simples (si détection → ouvrir couvercle).
-
Optimisation du fonctionnement : ajuster les temps de réponse, la durée d’ouverture, etc.
Compétences transversales :
- Gestion de projet : planifier les étapes de réalisation, répartir les tâches, respecter les délais.
-
Résolution de problèmes : savoir réagir face aux imprévus techniques ou fonctionnels.
-
Travail en équipe.
Description du programme des séances :
~6 séances :
- ~Introduction du projet (brainstorming)
- ~1 séances sur TinkerCAD et sur l'impression 3D
- ~1 séance sur inkscape et sur la découpe laser
- ~1 séance Actionneur : servomoteur RC 180°(déplacement)
- ~1 séance Capteur : ultrason (distance)
- ~1 séance Assemblage et programmation
Matériel :
- 1 x Arduino Nano ou compatible (seeeduino, funduino,...) : ~10€
- 1 x câble USB C : ~1€
- 1 x Sensor Shield pour Arduino Nano : ~3€
- 1 x servomoteur à rotation 180° (Servomoteur 180° SG90 9g) : ~2€
- 1 x Module ultrason (HC-SR04) : ~2€
- Une imprimante 3D pour imprimer les pièces du projet (fichier disponible à la prochaine page)(~5€ de filament) :
Total de 23€ par poubelle - Une découpe laser pour découper une pièce du projet
Modélisation en 3D du couvercle
Préparation de la séance (Pour l'animateur) :
Avant de commencer à modéliser en 3D notre pièce, veuillez consulter les pages suivantes :
- Cette page expliquant comment créer une classe sur Tinkercad (utile pour le travail en groupe ou en classe).
- Cette page expliquant comment utiliser Tinkercad pour créer un modèle 3D (une séance pour apprendre à utiliser tinkercad avant de modéliser la pièce finale peut-être envisagé)
Début de la séance :
Commençons à modéliser en 3D le couvercle de la poubelle à couvercle automatique.
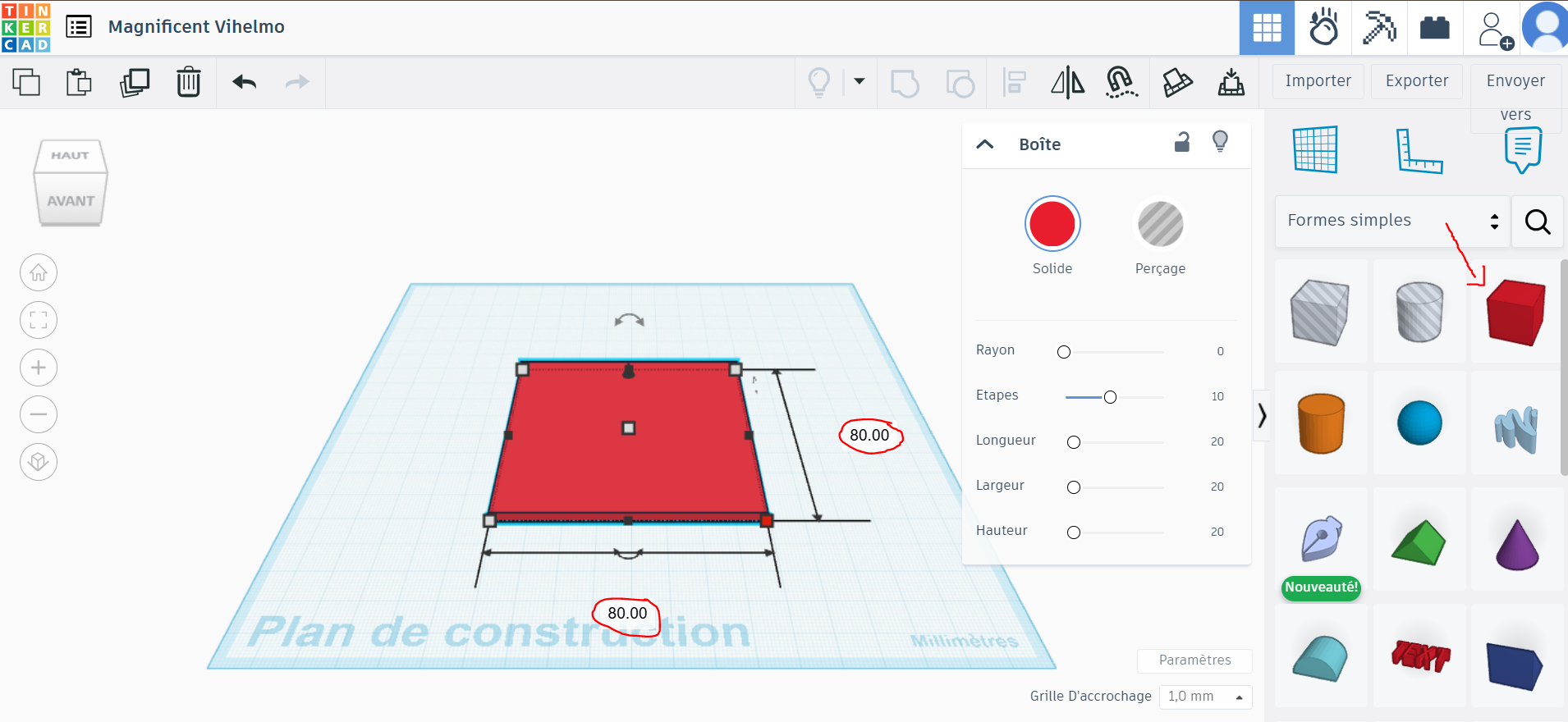
Réaliser un pavé droit de dimension :
- 80 mm de Longueur
- 80 mm de largeur
- 3 mm de hauteur
Ajouter deux pavés droits de dimensions :
-
21 mm de longueur
- 4 mm de largeur
- 3 mm de hauteur
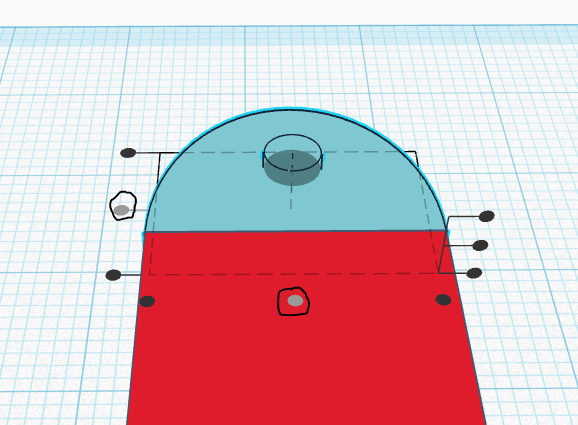
Utiliser le mode "perçage" sur ces blocs, puis les placer dans les coins supérieurs gauche et droite du pavé droit comme indiqué ci-dessous.

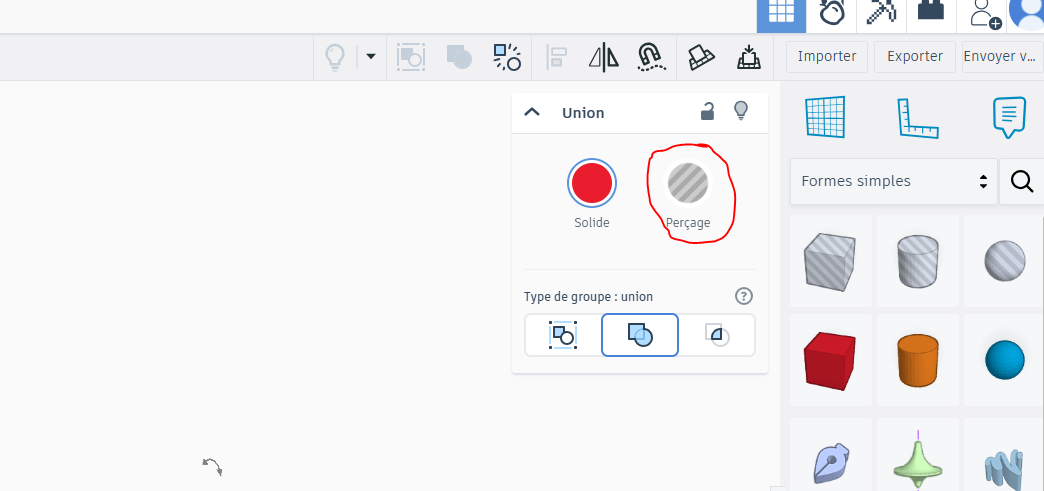
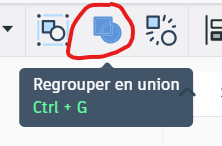
Sélectionner tout le modèle en appuyant sur les touches "CTRL + A" de votre clavier et utiliser l'outil "Regrouper en union" (Ou les touches "CTRL + G" de votre clavier.
Ajouter 2 cylindres de dimensions :
- 3 mm de longueur
- 3 mm de largeur
- 3 mm de hauteur
Et positionnez-les comme indiqué sur l'image ci-dessous.
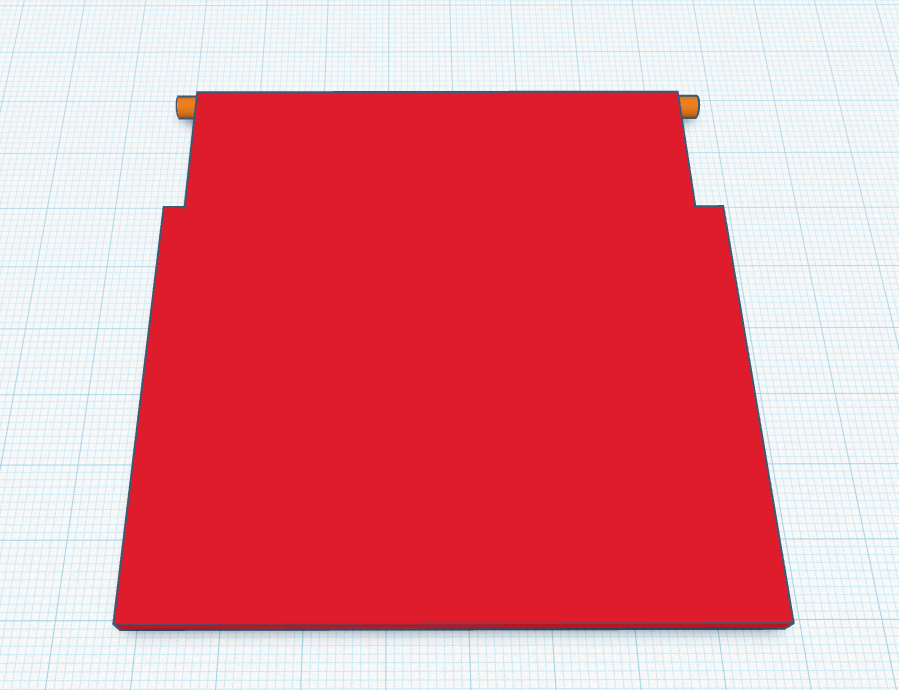
Puis regrouper le tout.
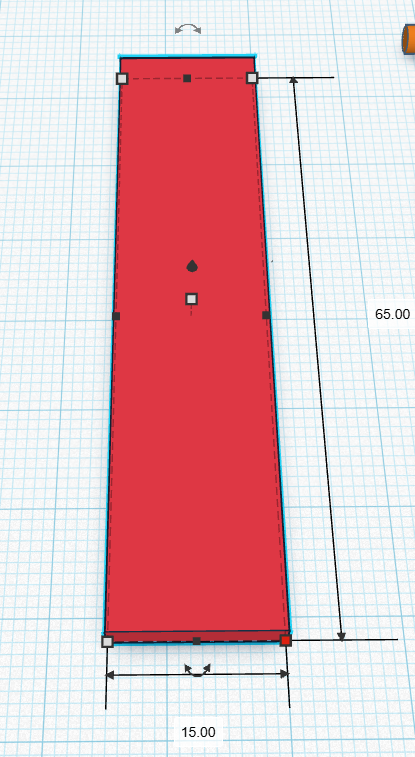
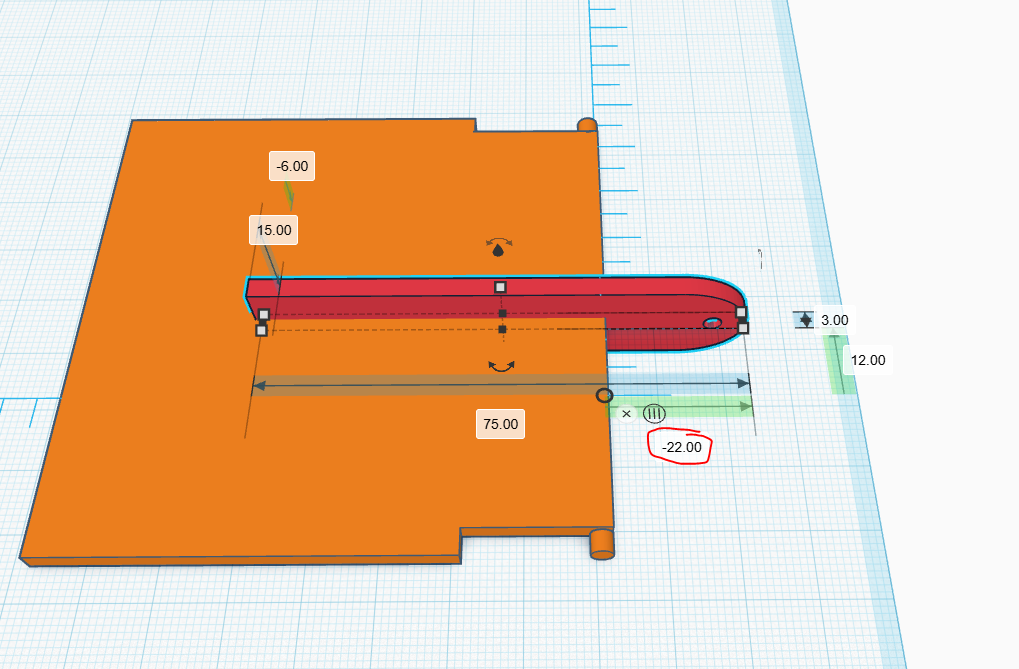
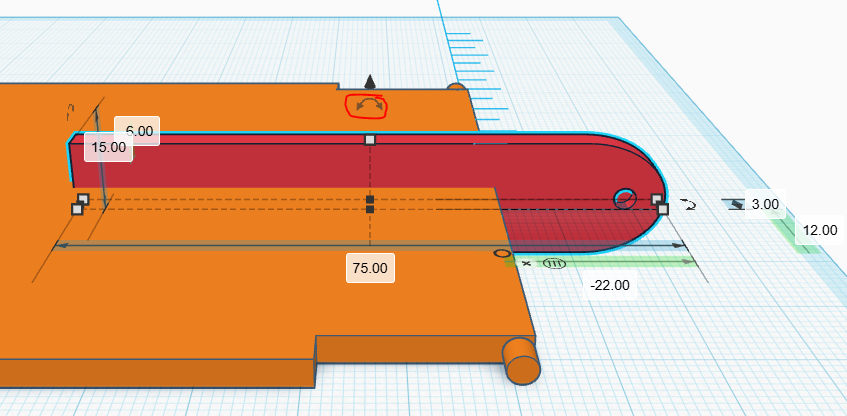
Ajouter un cube et le modifier pour obtenir les dimensions suivantes :
- 65 mm de longueur
- 15 mm de largeur
- 3 mm de hauteur
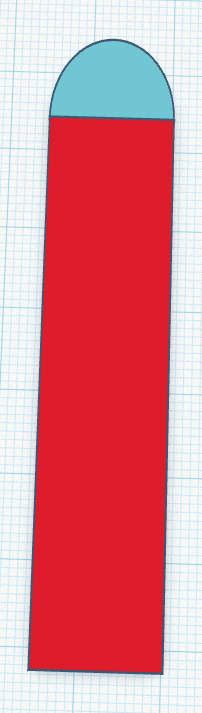
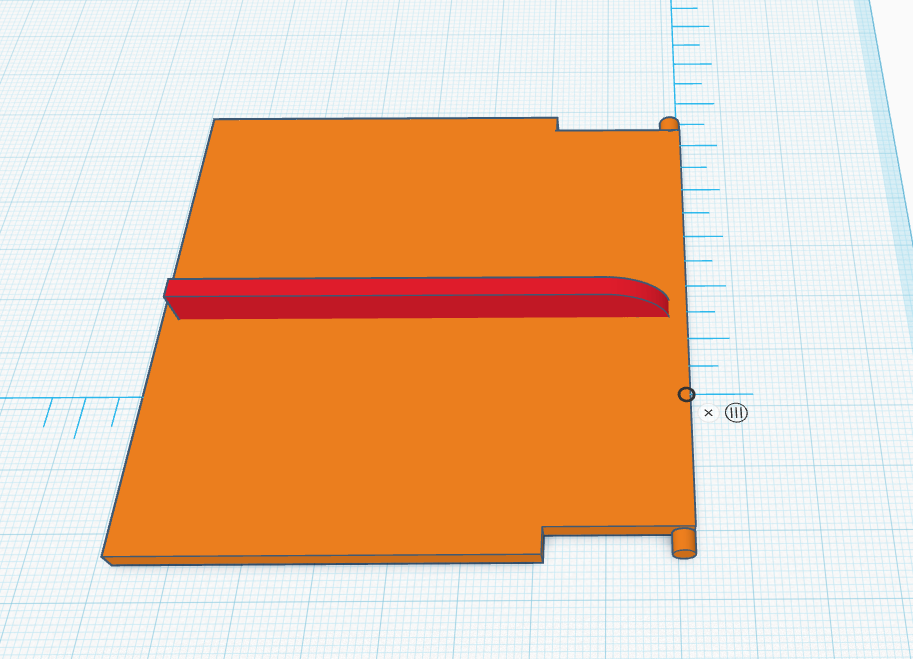
Ensuite, ajouter un "toit arrondi" et le modifier pour obtenir les dimensions suivantes :
- 15 mm de longueur
- 10 mm de largueur
- 3 mm de hauteur
Le positionner en haut du pavé précédemment créé.
Après cela, ajouter un cylindre de dimensions :
- 3 mm de longueur
- 3 mm de largueur
- 3 mm de hauteur
Puis le mettre en mode "perçage".
Maintenant, il faut le positionner au centre de notre toit arrondi. Pour cela utiliser l'outil "Aligner" :
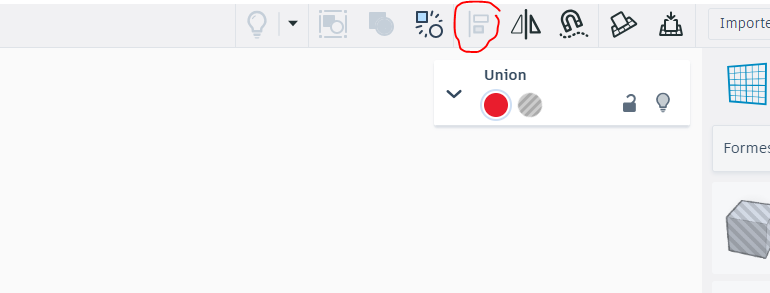
et positionner notre cylindre au centre comme l'image ci-dessous :
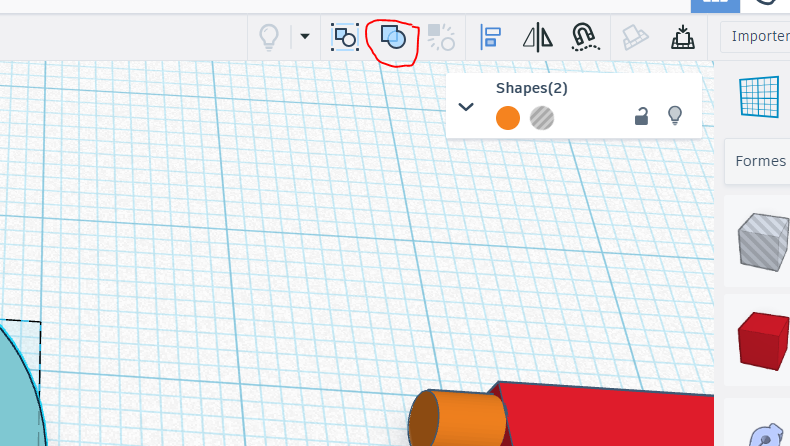
Puis, regrouper le tout ensemble (CTRL + G) :
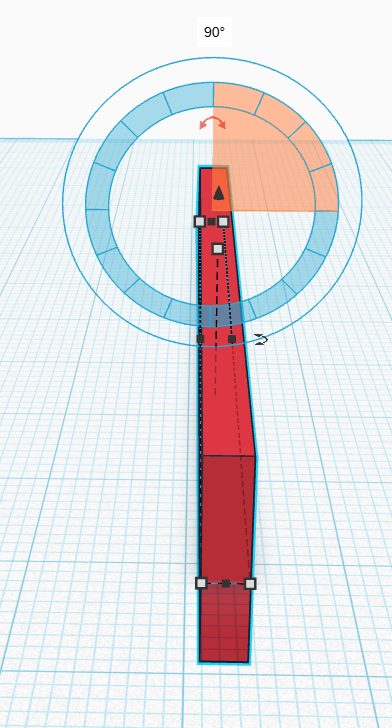
Après cela, faites une rotation de 90° à notre modèle 3D.
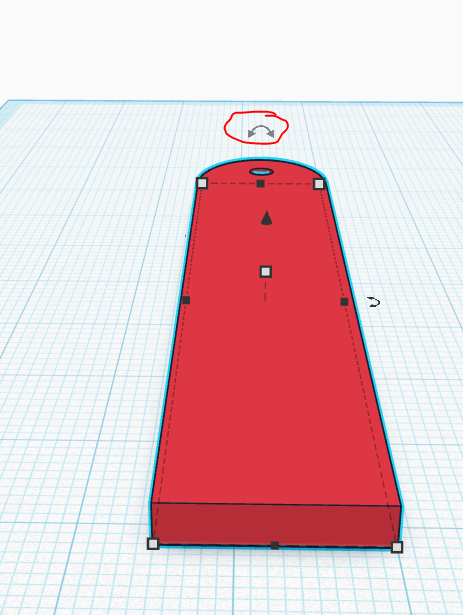
Ensuite, positionner la forme au centre de notre base en utilisant l'outil "Aligner" :
Il faut à présent faire avancer de 22 mm notre forme par rapport à notre base.
Pour cela, utiliser l'outil "Règle" comme indiqué ci-dessous :
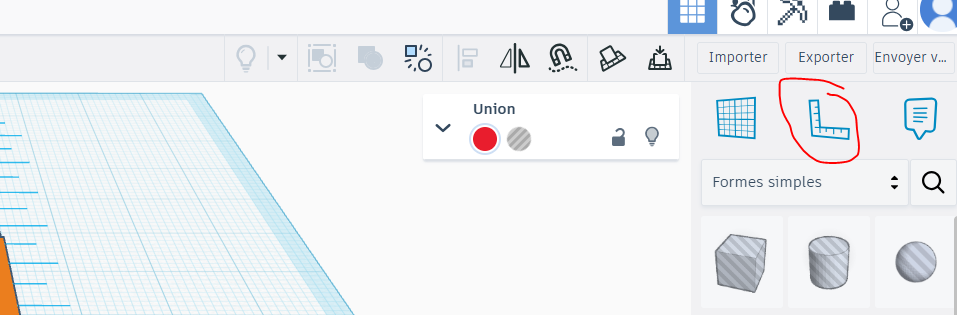
et la positionner au niveau de notre base :
Déplacer notre forme de -22 mm :
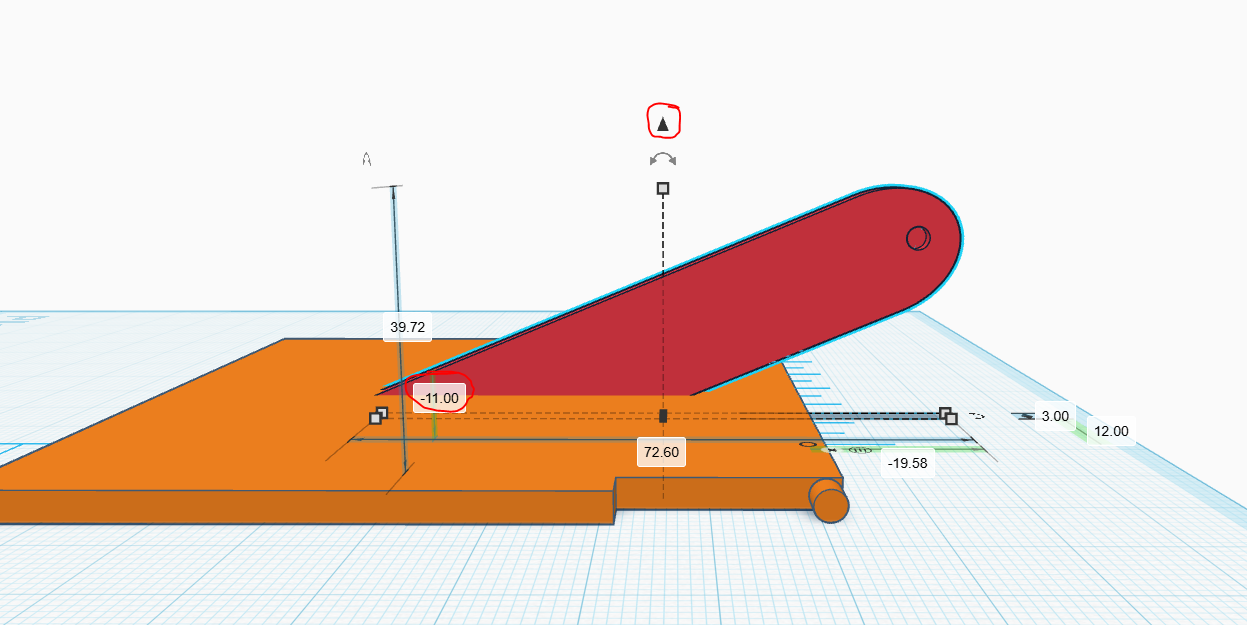
Faites une rotation (de -22.5° ou 22.5° en fonction du sens dans lequel vous travaillez) comme ci-dessous :
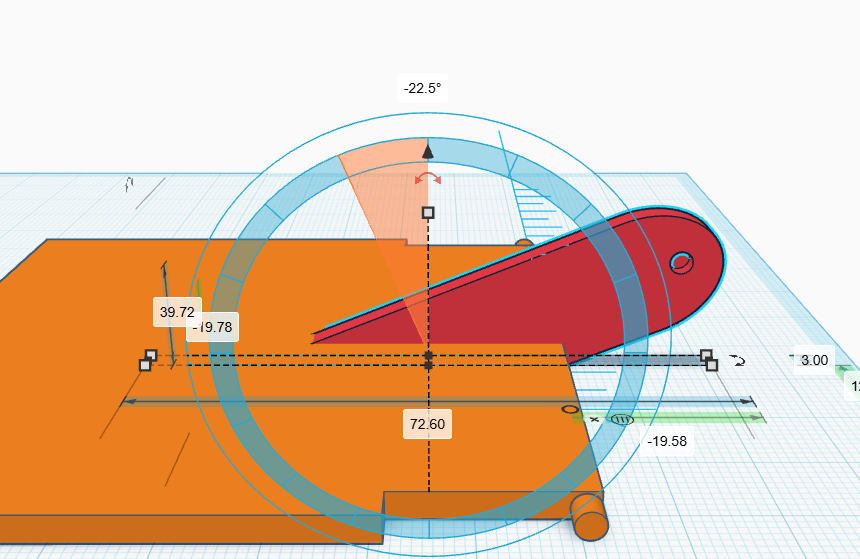
Utiliser la flèche verticale (voir image ci-dessous) pour mettre la pièce à -11 mm de haut :
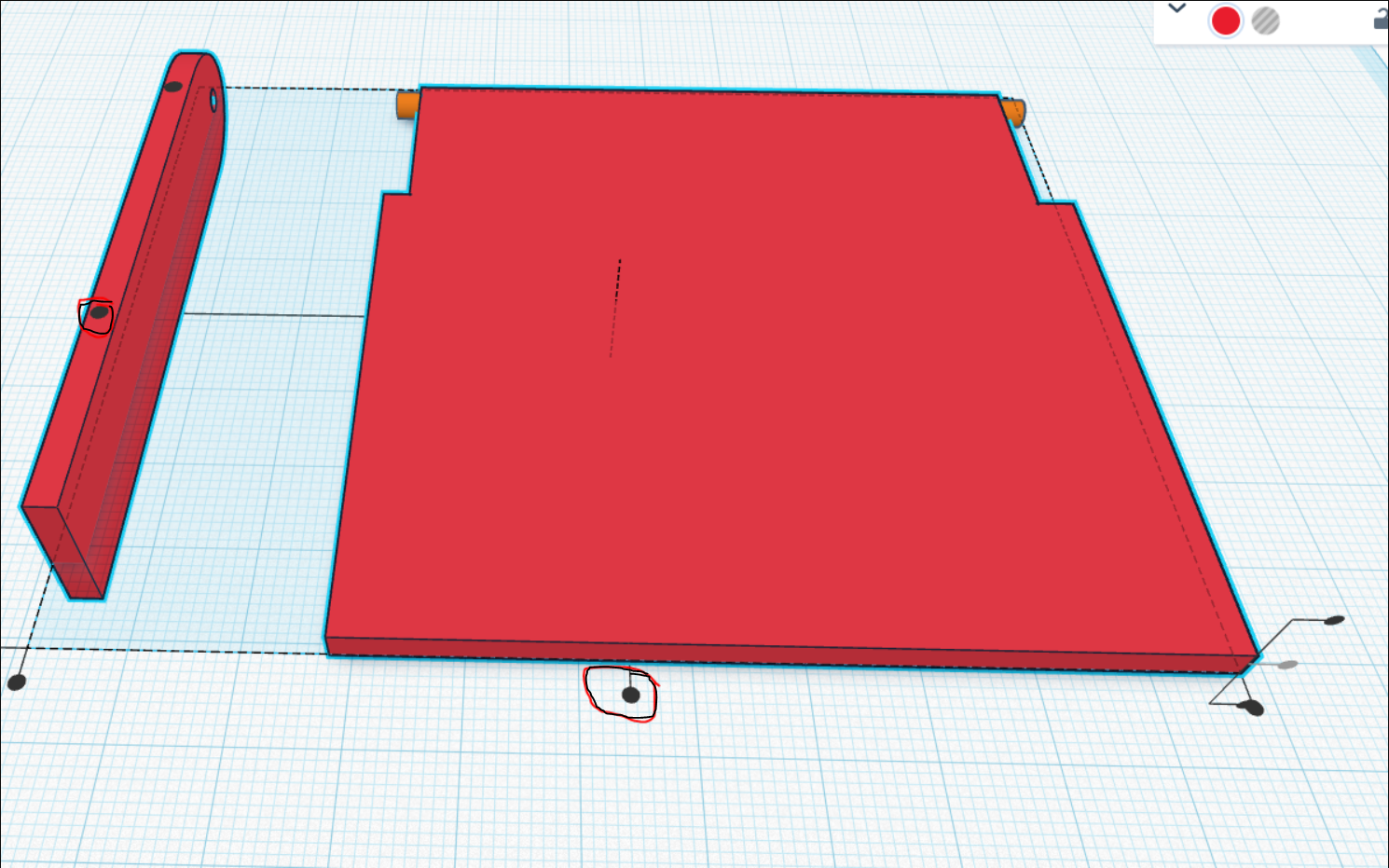
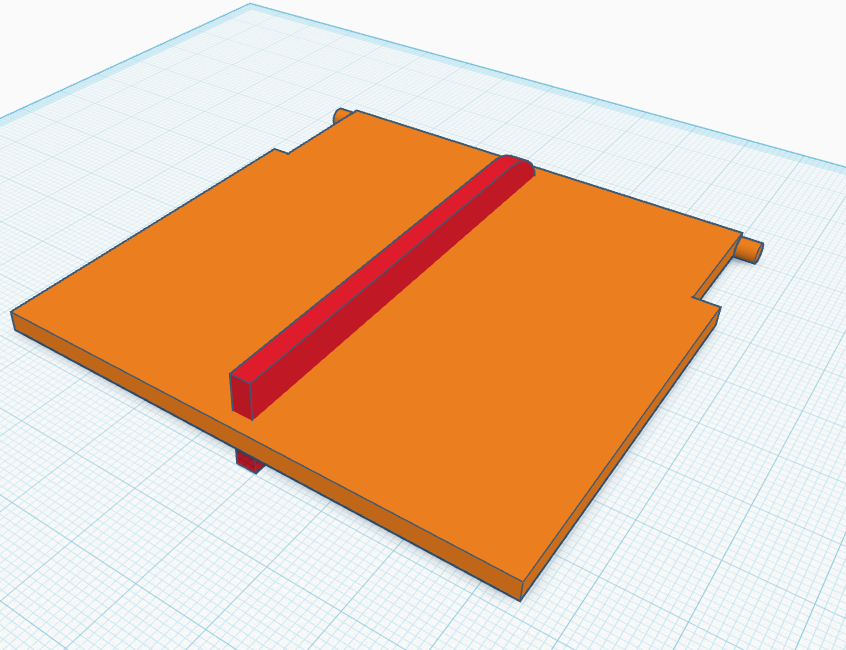
Supprimer le reste de notre forme en créant un nouveau bloc en mode "perçage" et le positionner sous la pièce.
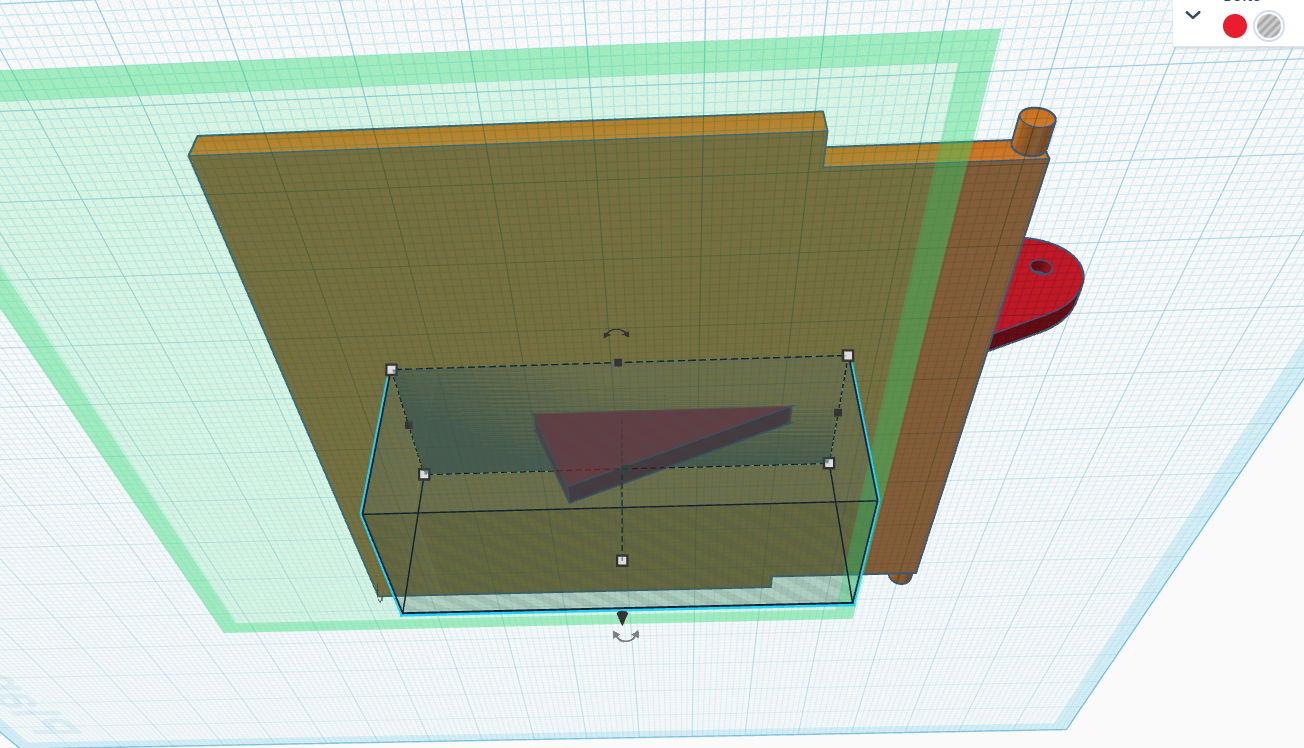
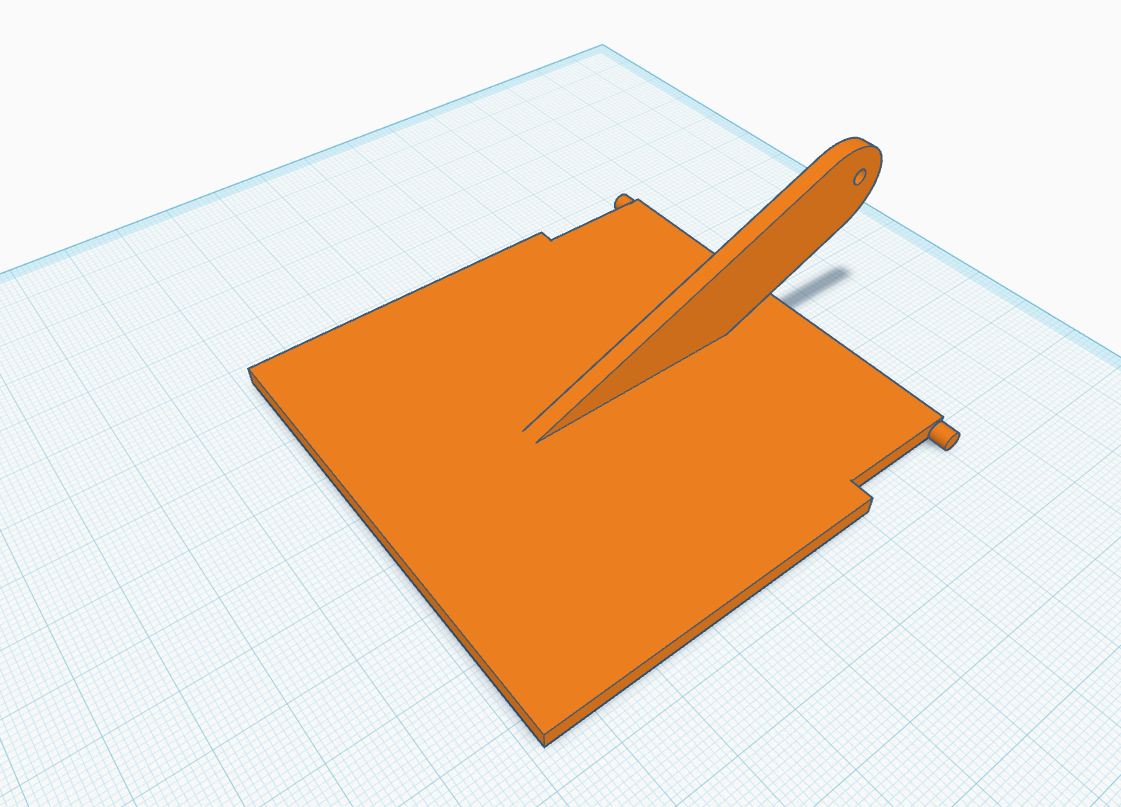
Sélectionner tout le modèle (CTRL + A) et appuyer sur l'outil "Regrouper" pour obtenir notre couvercle.
Utilisation de la découpe laser pour le mécanisme de la poubelle à couvercle automatique
Objectif :
Initiation à la découpe laser et à l’utilisation du logiciel Inkscape.
Modélisation :
-
Si vous possédez déjà Inkscape sur votre ordinateur, ouvrez simplement le logiciel.
Sinon, vous pouvez le télécharger à l’aide du lien suivant :
https://inkscape.fr/
Pour en apprendre plus sur inkscape : https://innovation.iha.unistra.fr/books/2-fablab-formation-machines-logiciels/page/inkscape-petite-intro-pour-newbies
Une fois Inkscape ouvert, vous pouvez commencer la modélisation du mécanisme en bois.
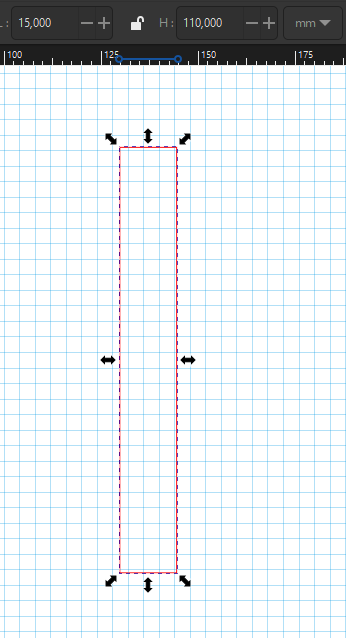
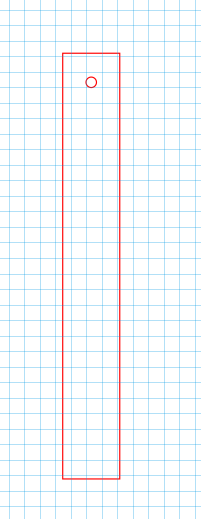
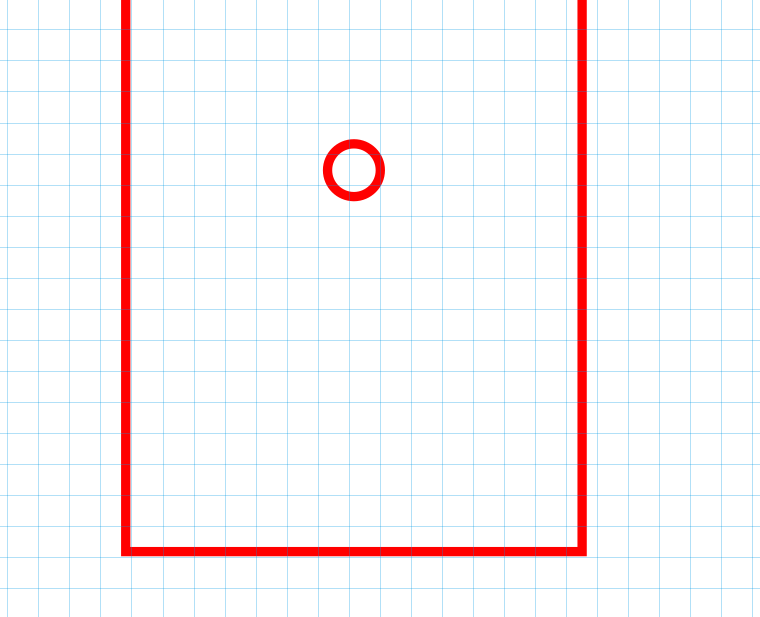
Étape 1 : Création de la forme principale
Vous devez créer un rectangle avec les dimensions suivantes :
- 15 mm de largeur
- 112 mm de hauteur
Étape 2 : Création d'un trou d'accueil d'une vis pour la fixation au couvercle
Ajouter un cercle avec les dimensions suivantes :
- 3 mm de largeur
- 3 mm de hauteur
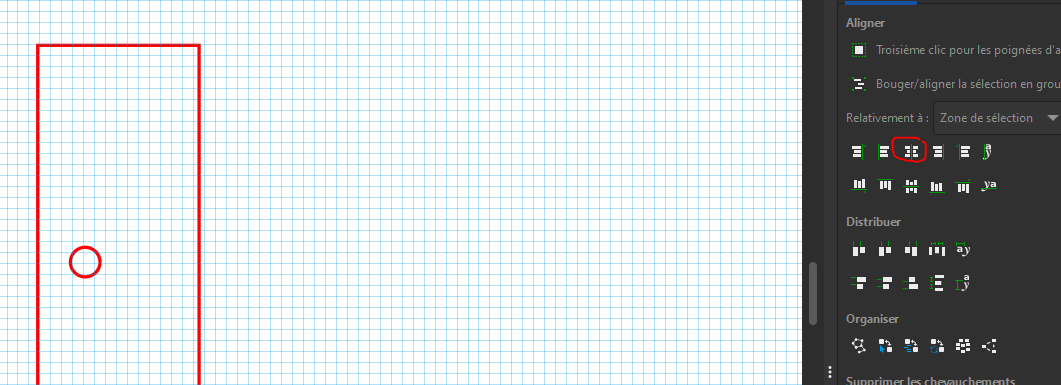
Positionner ce cercle au centre du rectangle en sélectionnant les 2 formes et à l’aide de l’outil "Aligner", comme montré ci-dessous :
Si vous ne trouver pas l'outil, rendez vous dans l'onglet "Objet > Aligner et distribuer..."
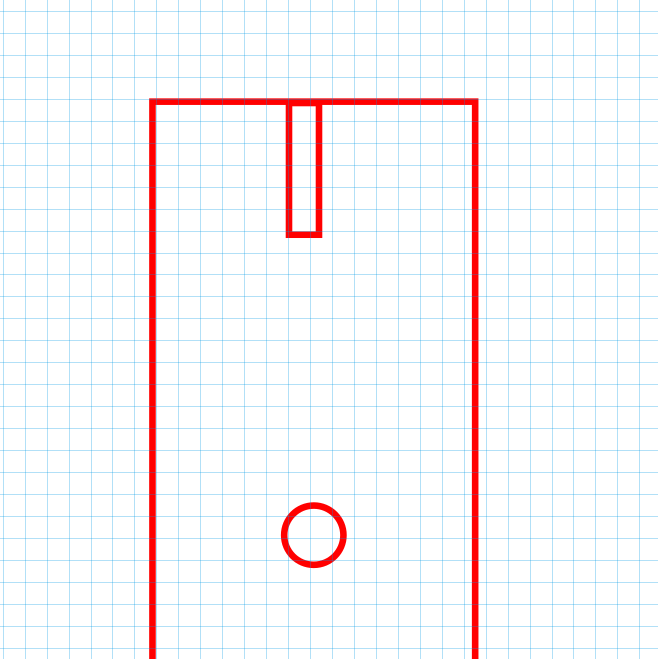
Étape 3 : Positionnement du trou à 6 mm du bord supérieur
Créer un autre rectangle servant de repère avec les dimensions suivantes :
-
6 mm de hauteur
- 2 mm de largeur
Positionner ce rectangle au niveau du bord supérieur, comme indiqué ci-dessous :
Placer le cercle de manière à ce qu’il soit correctement positionné à 6 mm du bord en vous aidant du rectangle de repère précédemment créé.
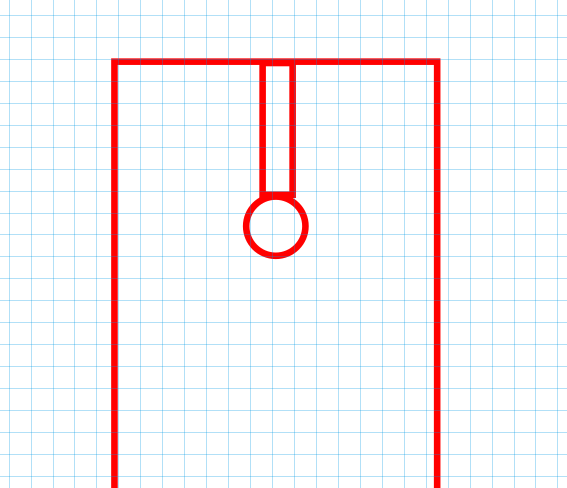
Supprimer le rectangle utilisé comme repère, ce qui donne le résultat suivant :
Étape 4 : Création du second trou d'accueil de vis pour la fixation au servomoteur
Il manque maintenant le trou destiné à la vis reliée au servomoteur.
Créer un cercle avec les dimensions suivantes :
-
2 mm de largeur
-
2 mm de hauteur
Positionnez le au centre horizontal du rectangle (entre les bords droit et gauche) à l’aide du même outil d’alignement vu précédemment.
Étape 5 : Positionnement vertical du second trou
Pour positionner correctement ce cercle sur l’axe vertical (axe Y), vous devez créer un rectangle servant de repère avec les dimensions suivantes :
-
3 mm de hauteur
-
1 mm de largeur
Positionner ensuite les formes comme montré ci-dessous :
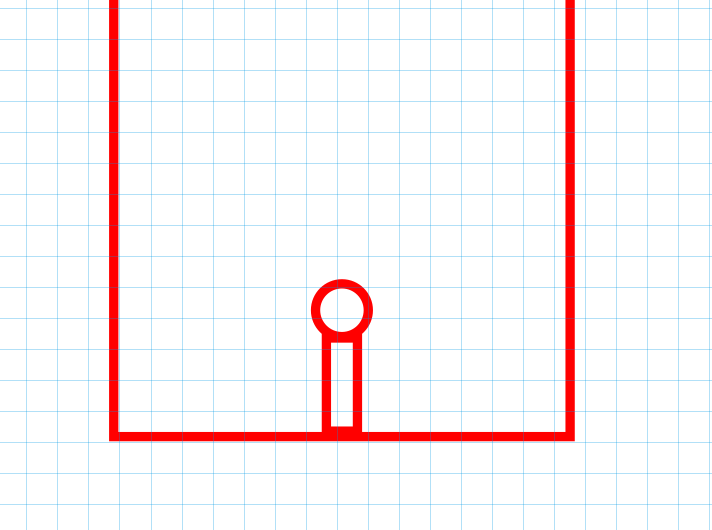
Une fois le cercle correctement placé, vous pouvez supprimer le rectangle utilisé comme repère.
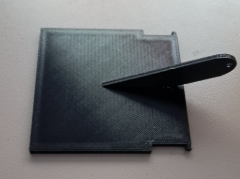
Étape 6 : Découpe au laser
La modélisation du mécanisme en bois est maintenant terminée.
Il ne vous reste plus qu’à procéder à la découpe au laser si vous en disposez d'une.
Fonctionnement et programmation des composants
Objectif :
Comprendre le fonctionnement des composants du projet et apprendre à les programmer
1. Introduction à l'Arduino Nano
Qu'est-ce qu'une Arduino Nano ?
L’Arduino Nano est une petite carte électronique programmable basée sur un microcontrôleur. Elle permet de créer facilement des projets interactifs, elle est donc le cerveau du projet. C'est l'Arduino Nano qui décidera de faire tourner le servomoteur en fonction de la longueur mesurée par le capteur à ultrason en exécutant le programme que vous lui avez donné.
Si vous n'avez jamais utilisé un Arduino Nano, rendez-vous sur cette page : https://innovation.iha.unistra.fr/books/robotique-educative/page/quest-ce-que-larduino
2. Capteur à ultrasons HC-SR04
Qu'est ce qu'un capteur à ultrason et comment il fonctionne ?
Le capteur à ultrasons HC-SR04 est un dispositif utilisé pour mesurer des distances sans contact. Il fonctionne en émettant un ultrasons et en mesurant le temps mis par l’écho pour revenir après avoir heurté un obstacle. Simple à utiliser et peu coûteux, il permettra à l'Arduino Nano de détecter votre main afin de donner un signal au servomoteur et d'ouvrir le couvercle de la poubelle.
Si vous n'avez jamais utilisé un capteur à ultrasons, rendez-vous sur cette page : https://innovation.iha.unistra.fr/books/robotique-educative/page/quest-ce-quun-capteur-a-ultrasons
3. Servomoteur SG90 180°
Qu'est ce qu'un servomoteur et comment il fonctionne ?
Le servomoteur SG90 180° est un petit moteur électrique capable de se positionner avec précision sur un angle allant de 0 à 180 degrés. Il permettra à notre poubelle d'ouvrir son couvercle grâce à la rotation et la force exercée par celui-ci sur le couvercle.
Si vous n'avez jamais utilisé un servomoteur, rendez-vous sur cette page : https://innovation.iha.unistra.fr/books/robotique-educative/page/quest-ce-quun-servo-moteur
Assemblage et câblage de la poubelle à couvercle automatique
Objectif de la séance :
Réaliser l’assemblage complet de la poubelle à couvercle automatique.
1. Assemblage du capteur à ultrasons
Le modèle 3D de la poubelle à imprimer en 3D ce trouve en pièce jointe du wiki
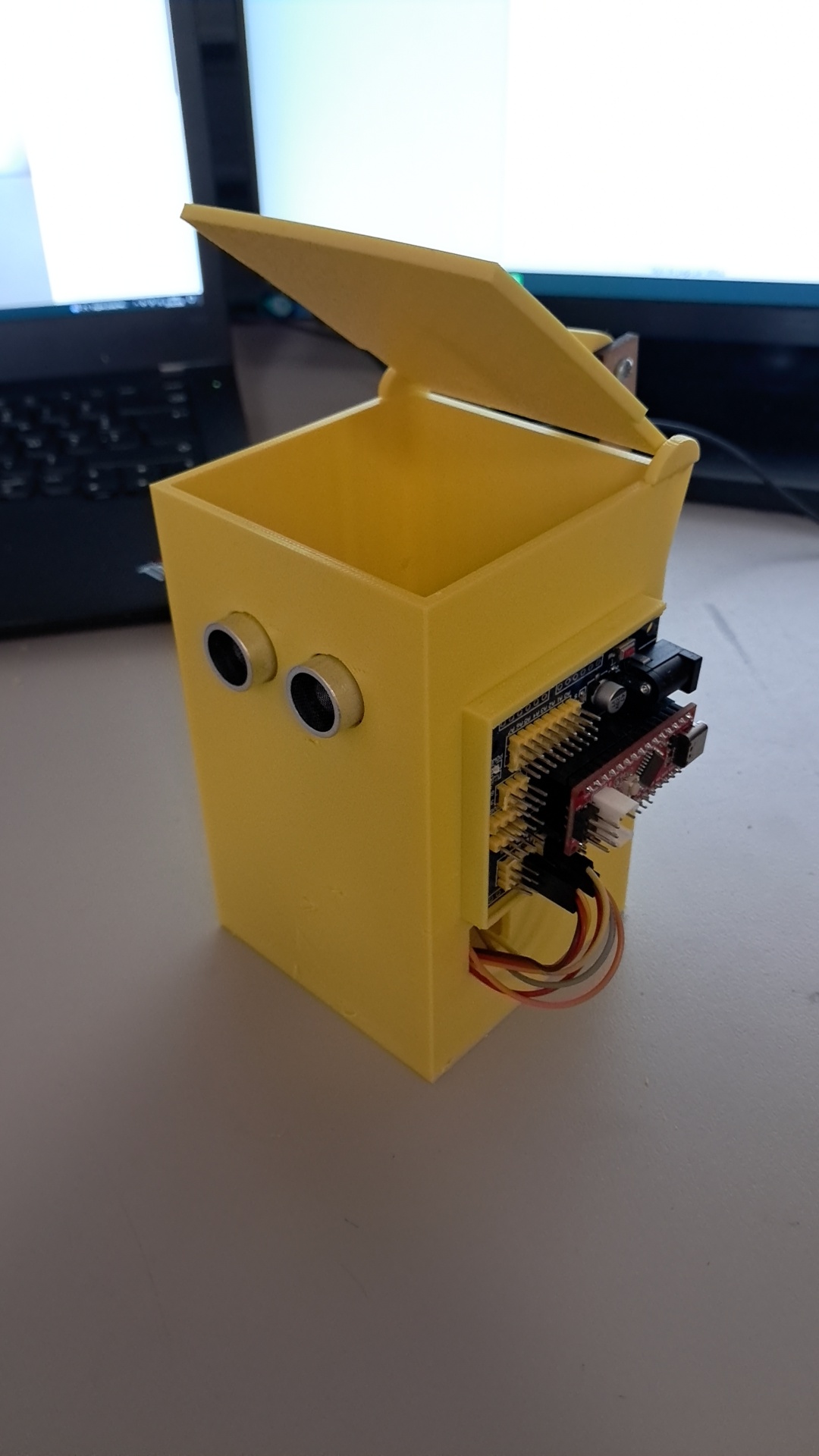
Vous devez positionner le capteur à ultrasons de la manière suivante :


Ensuite, vous devez faire passer les fils par le petit trou situé en bas à droite du capteur à ultrasons, comme indiqué ci-dessous :
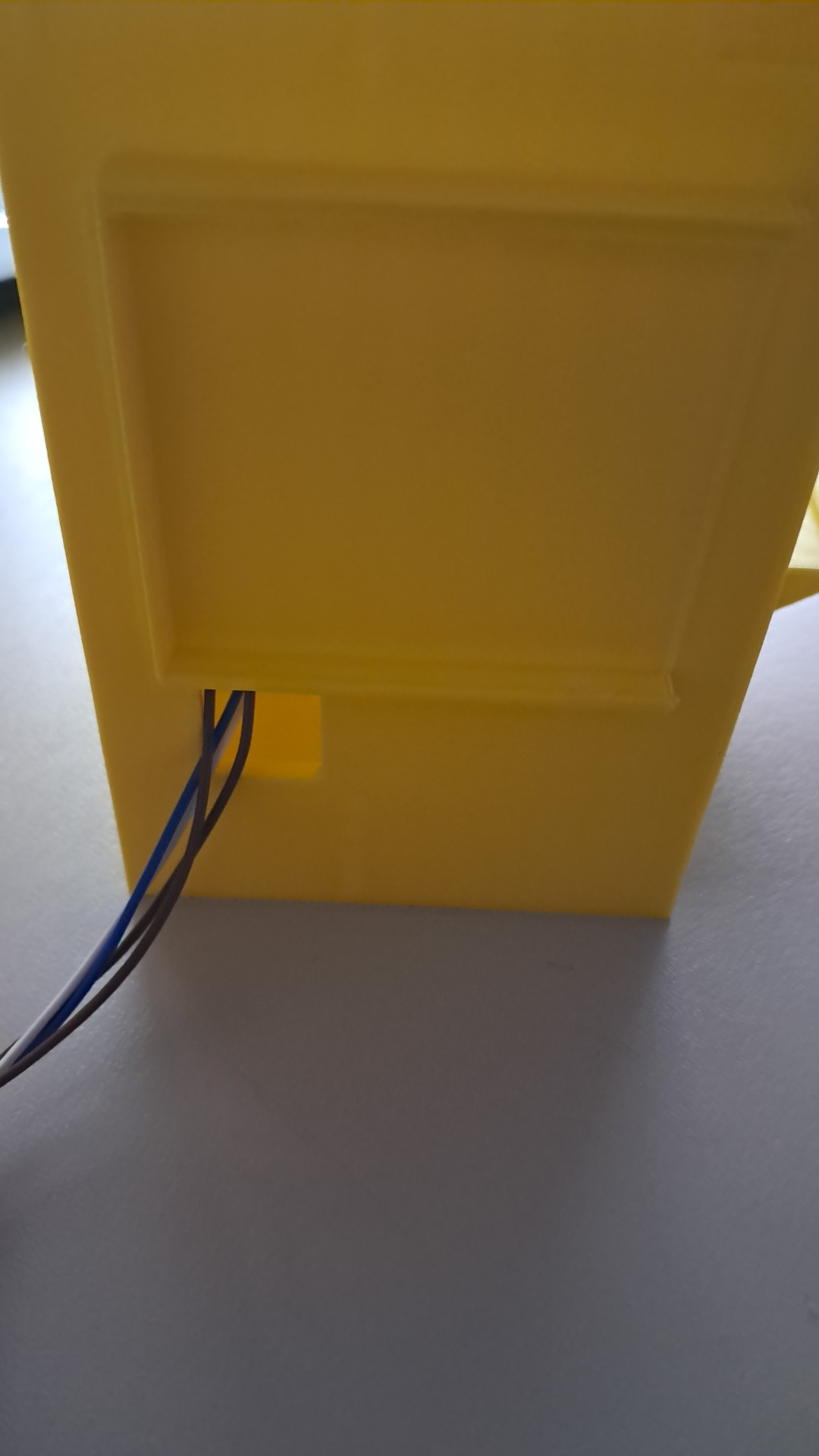
Une fois le capteur à ultrasons correctement installé, vous pouvez passer à l’installation de la carte Arduino.
Vous devez glisser votre Arduino Nano, accompagné de son shield, dans l’encoche prévue à cet effet, comme montré ci-dessous :
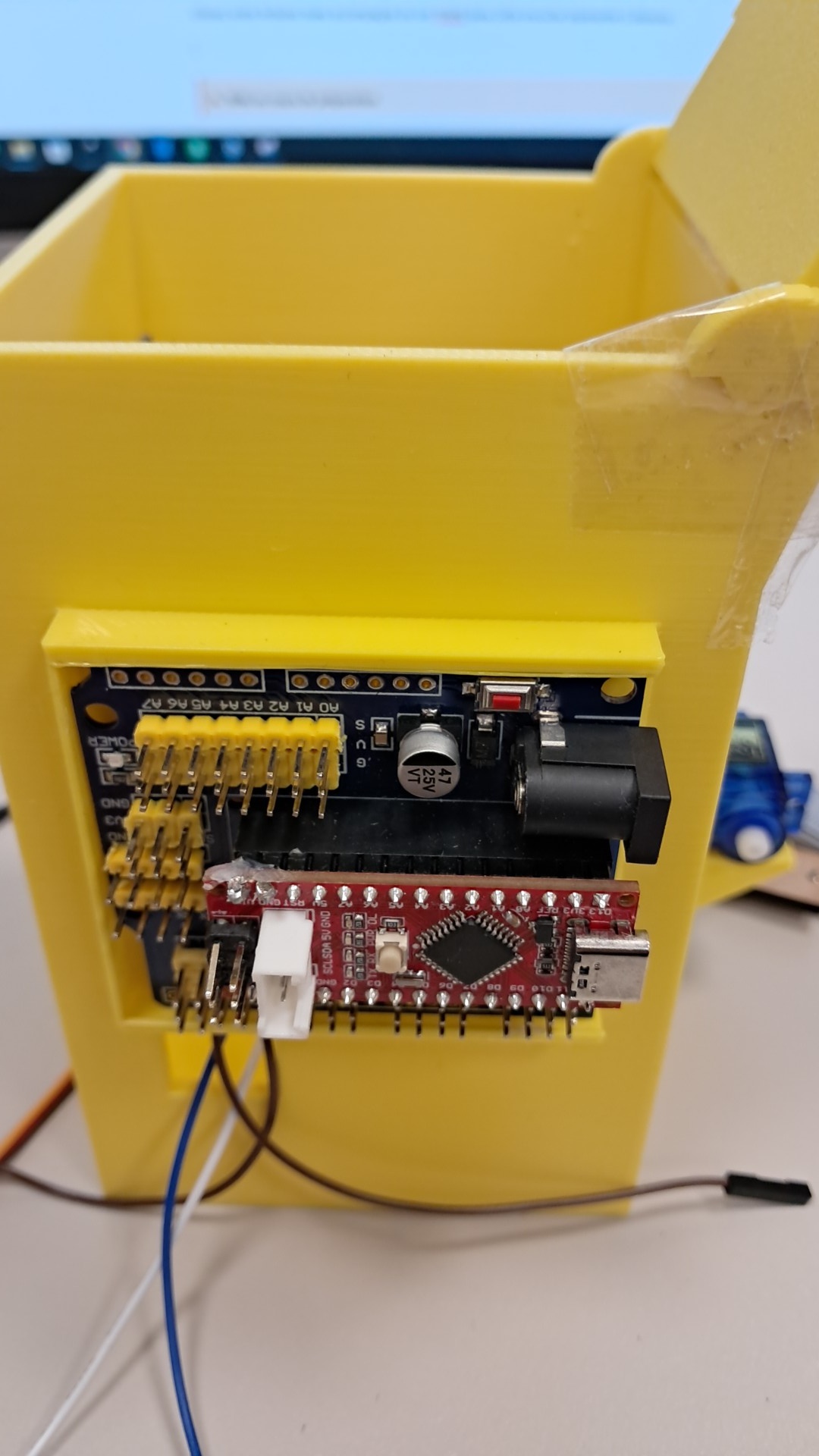

Une fois la carte installée dans son support, vous pouvez clipser le couvercle sur la boîte, comme illustré ci-dessous :

Lorsque cette partie technique est terminée, vous pouvez passer à l’assemblage du mécanisme en bois.
Pour cette étape, vous aurez besoin de :
-
1 vis M3 12
-
1 écrou M3
-
1 vis de servomoteur
-
1 tournevis
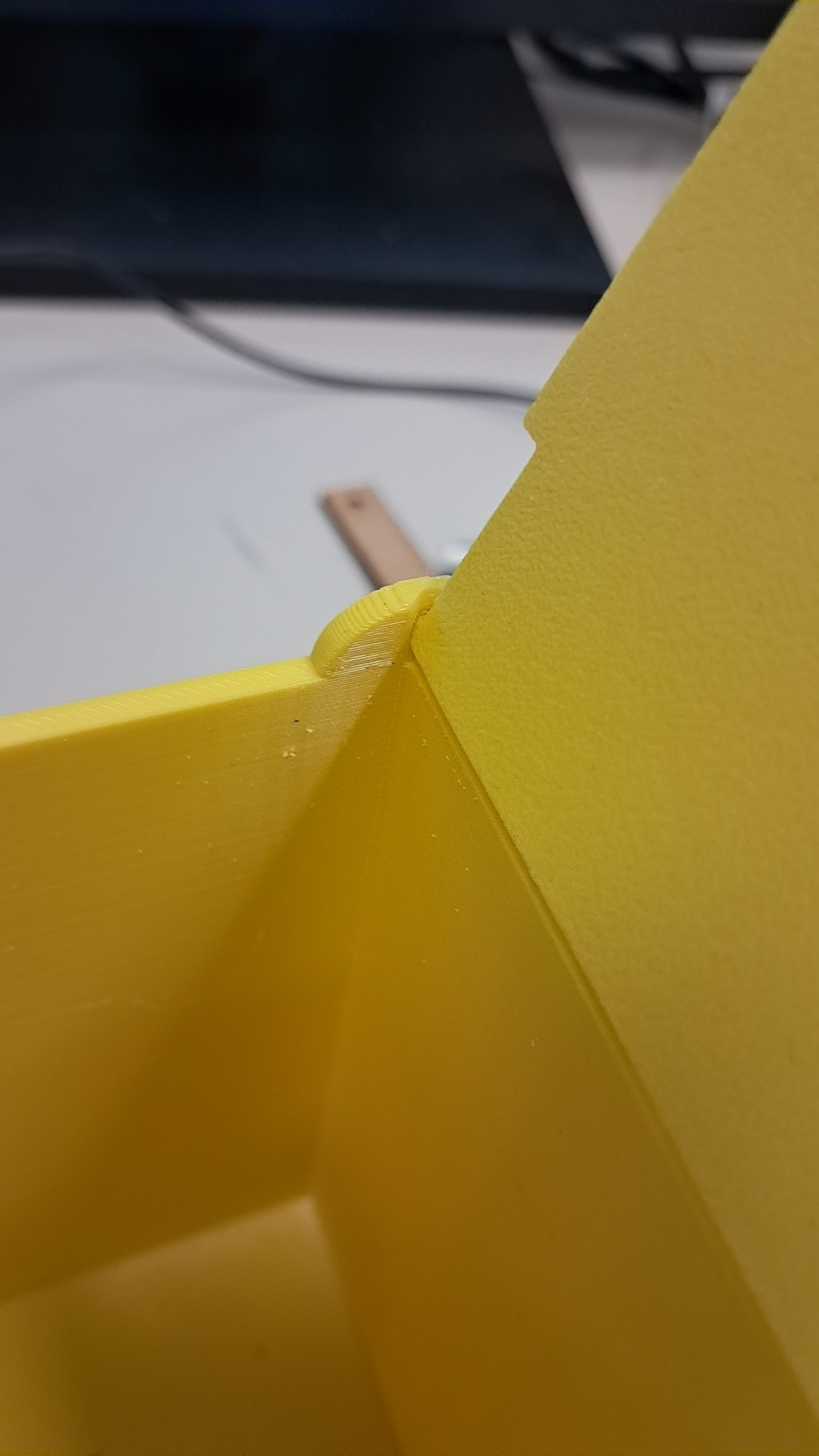
Dans le plus grand trou de la languette en bois, vous devez insérer la vis M3 12, puis l’insérer également dans la languette du couvercle, comme indiqué ci-dessous :
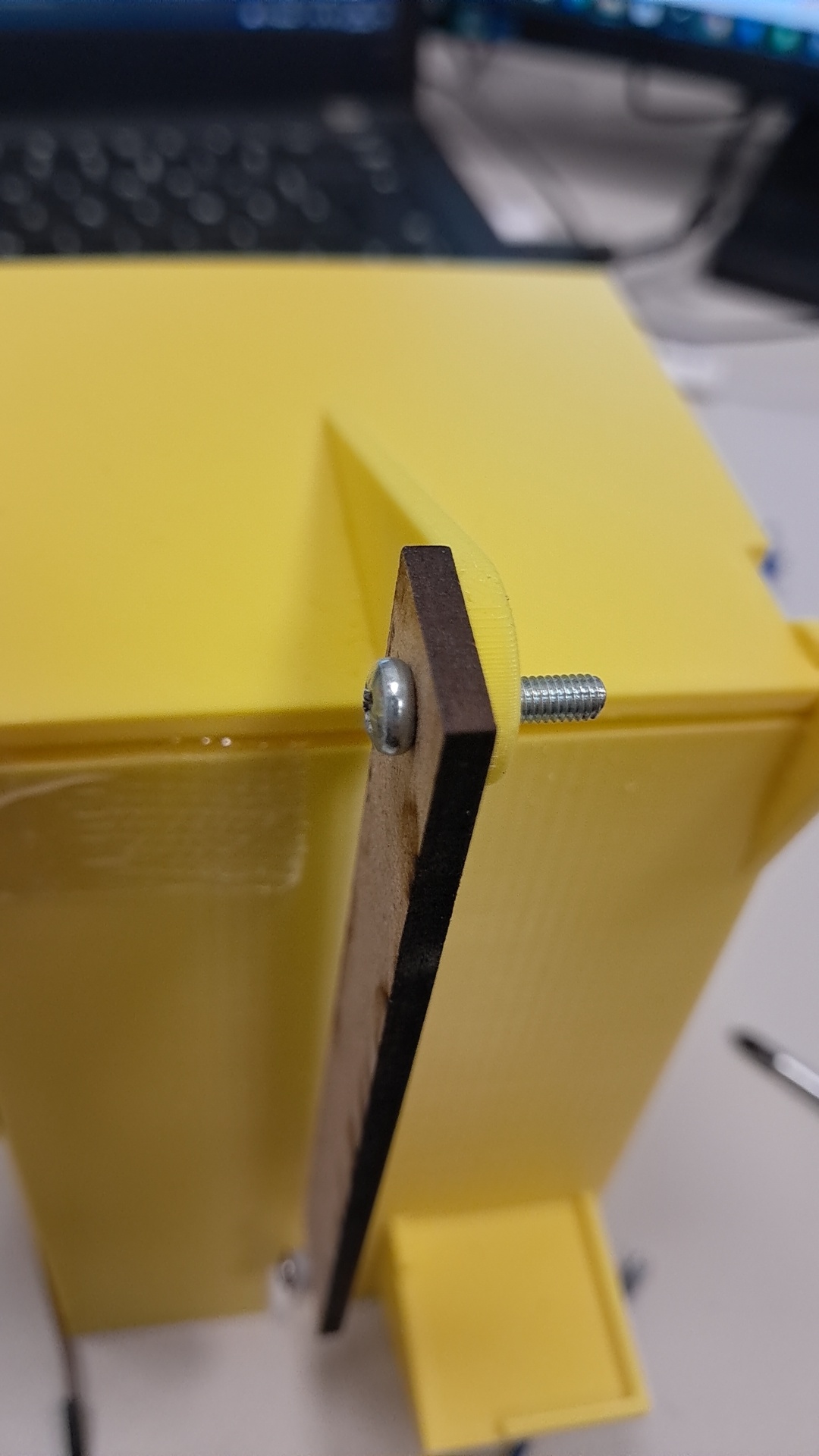
Vous devez ensuite ajouter l’écrou M3, comme montré ci-dessous :

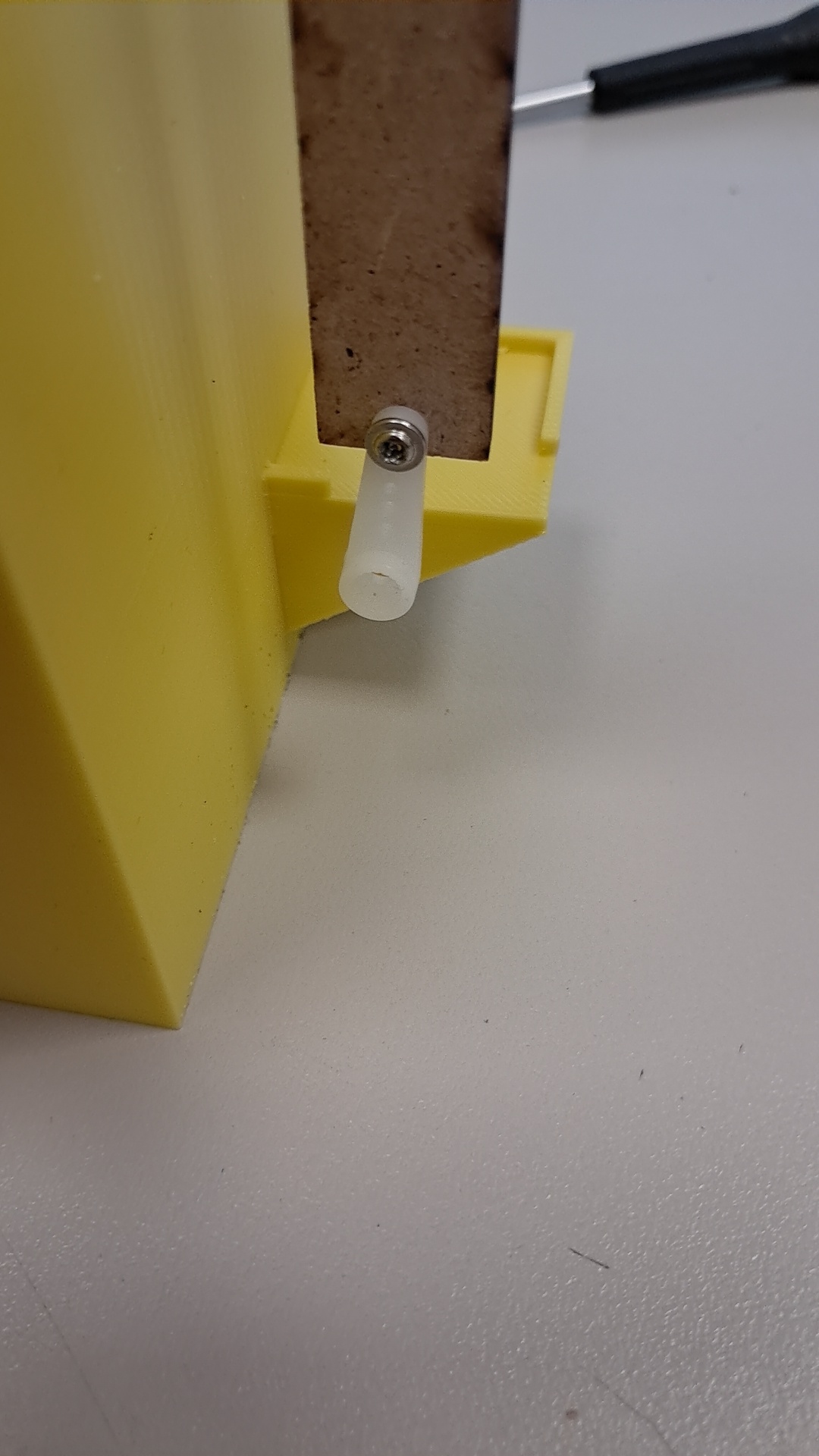
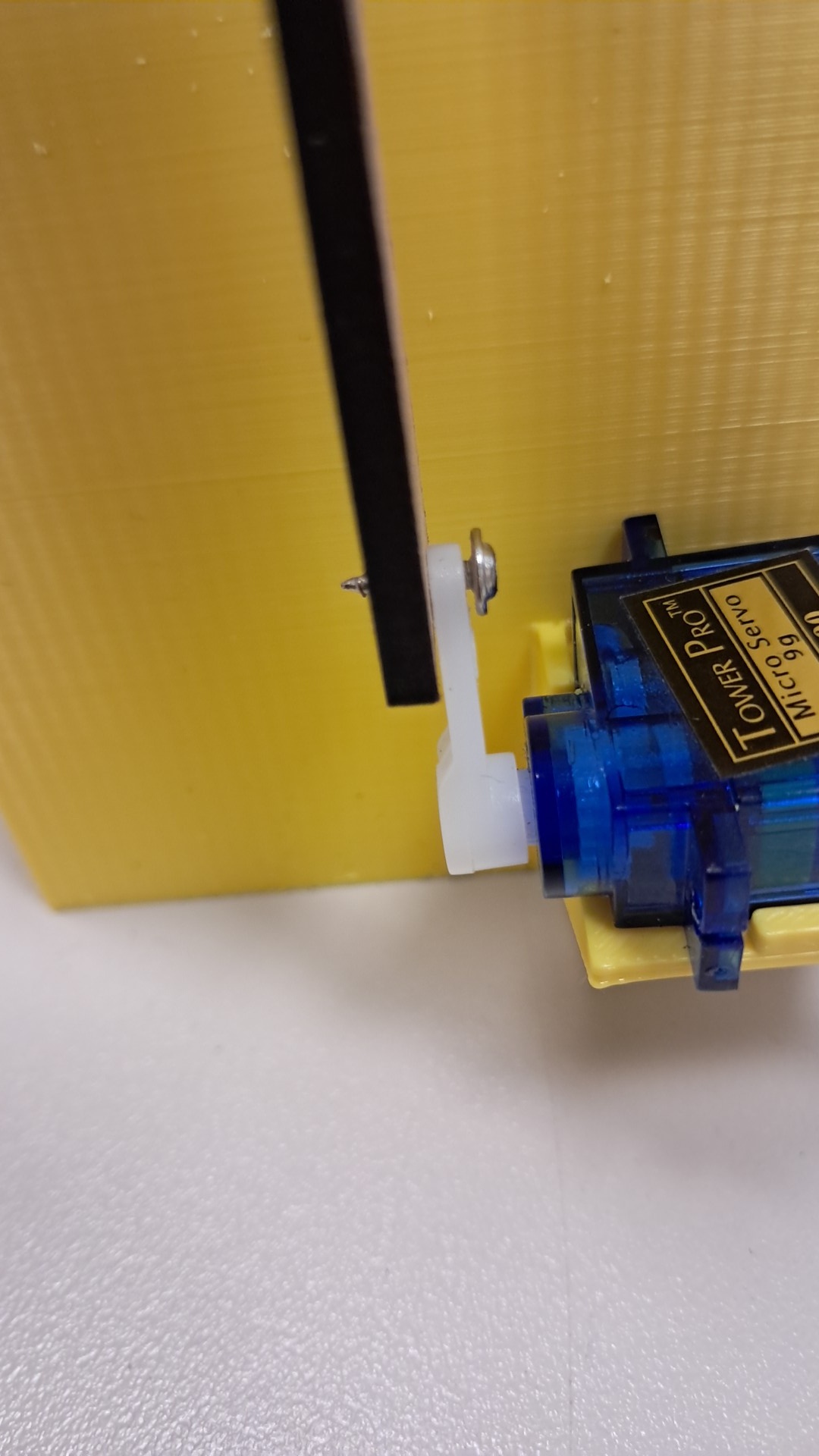
Une fois le côté couvercle terminé, il ne reste plus qu’à réaliser le montage côté servomoteur.
Pour cela, vous devez utiliser une vis de servomoteur et y fixer un palonnier avec un axe uniquement, comme sur l’image suivante :
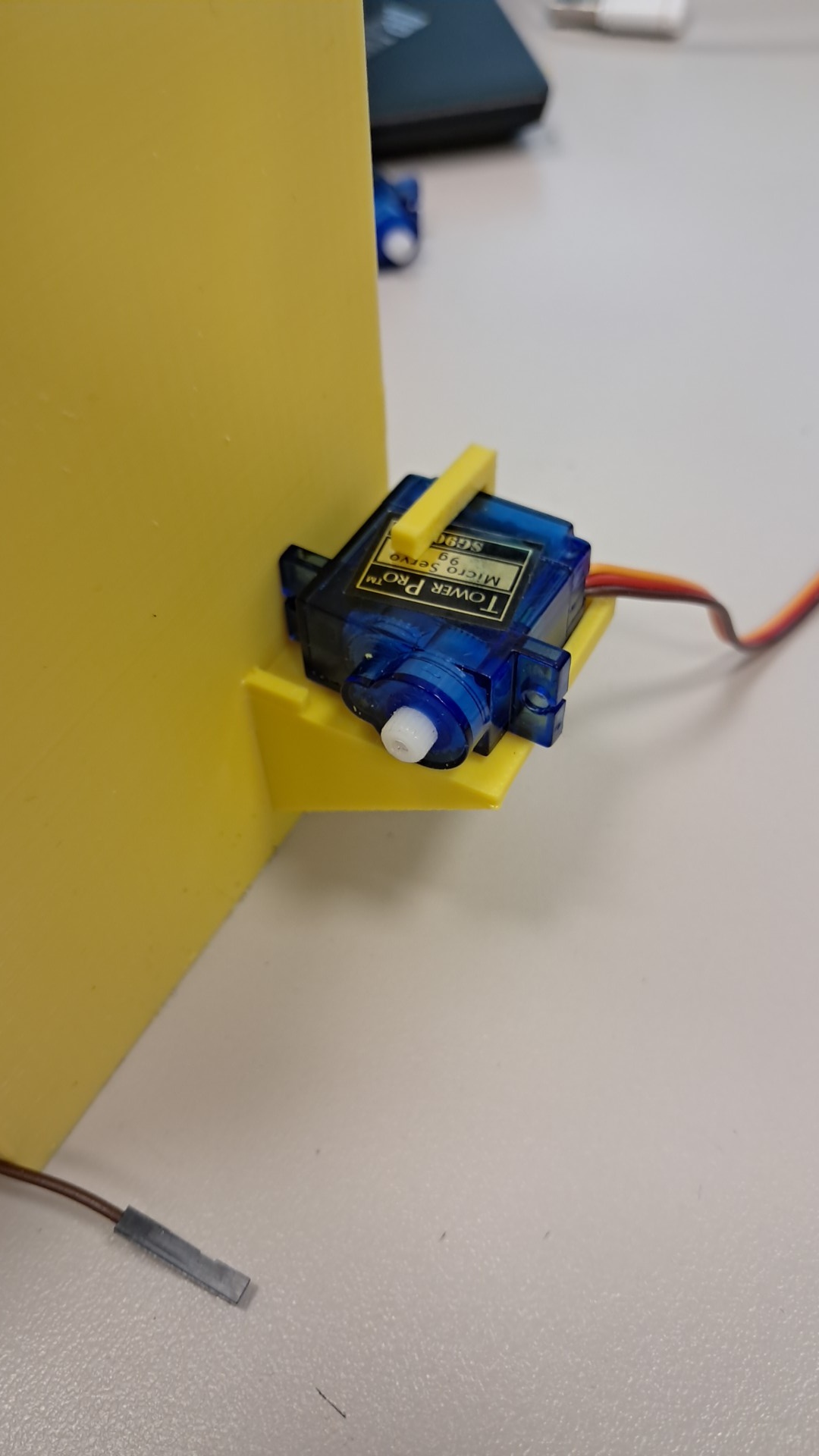
Vous devez maintenant ajouter le servomoteur, Mais avant de le positionner il faut l'initialiser. Pour cela mettez un palonnier sur le servomoteur et tournez le dans le sens inverse des aiguilles d'une montre sans forcer. Une fois arivé au bout votre servomoteur sera donc a 0°. Une fois fait positionnez simplement le servomoteur sur son siège.
Puis, ajoutez la pièce en forme de U afin de le maintenir en place, comme montré ci-dessous :
Une fois tous les composants en place, il ne reste plus qu’à clipser le palonnier sur le servomoteur, comme indiqué ci-dessous :
L’assemblage est maintenant terminé.
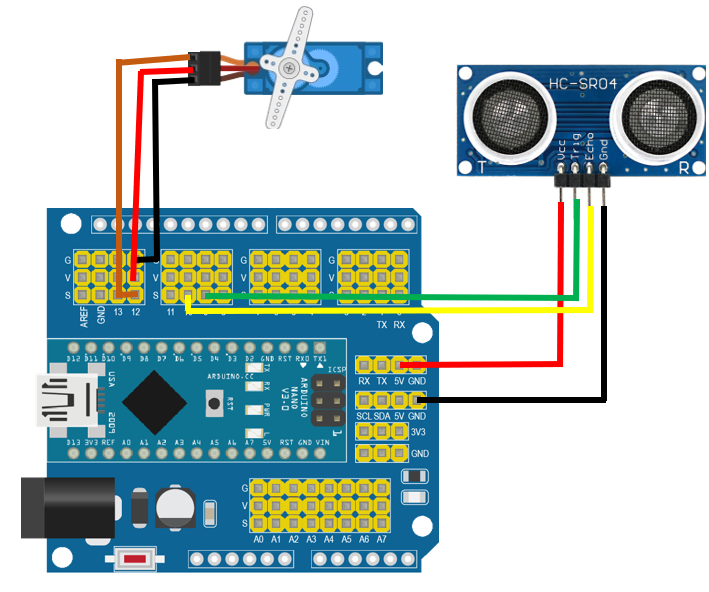
Câblage
Afin que les composants puissent communiquer entre eux, vous devez maintenant réaliser le câblage.
Voici les broches utilisées :
Capteur à ultrasons (HC-SR04)
-
VCC → 5V de l’Arduino
-
GND → GND de l’Arduino
-
TRIG → D9 de l’Arduino
-
ECHO → D10 de l’Arduino
Servomoteur
-
VCC (fil rouge) → 5V de l’Arduino
-
GND (fil noir) → GND de l’Arduino
-
Signal (fil jaune) → D12 de l’Arduino
Le montage final doit ressembler à l’exemple ci-dessous
Programmation de la poubelle à couvercle automatique
Objectif
Gestion et programmation de l’ensemble des capteurs et actionneurs d’une poubelle à couvercle automatique.
Rappel
Pour programmer la poubelle a couvercle automatique il faut avoir préalablement fait les étapes précédentes disponible ici
Exercice – Programmer la poubelle a couvercle automatique
Objectif pédagogique
Associer un capteur à un actionneur pour automatiser un mécanisme.
Etape 1
Réfléchir à un algorithme.
Correction :
Lorsque l'Arduino Nano démarre
Initialiser l'ultrason
Pour toujours
Calculer la distance avec l'ultrason
Si la distance est inférieur à 5cm Alors
Positionner le servomoteur à 180° (position du couvercle ouvert)
Attendre 2 secondes.
Sinon
Positionner le servomoteur à 0° (position du couvercle fermé)
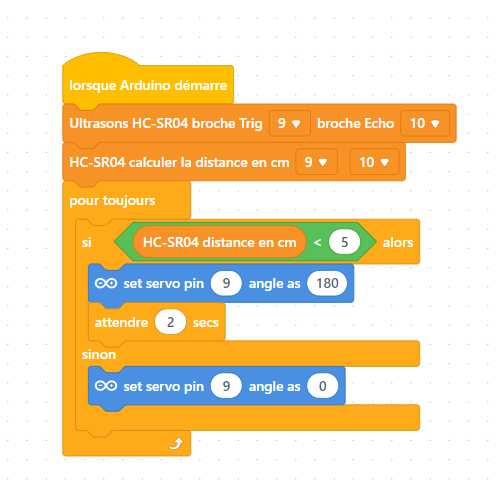
Etape 2
Réaliser le code pour la poubelle grâce a votre algorythme.
Correction :
Défis supplémentaires (pour aller plus loin)
Validation attendue
L’élève sait :
Bilan pédagogique
À la fin de ces deux exercices, les élèves comprennent :
🎯 Résultat : ils sont capables de recréer et adapter le code d’une poubelle à couvercle automatique, ce qui est un excellent projet concret et motivant en robotique.
Correction du code :
Voici la correction du code :
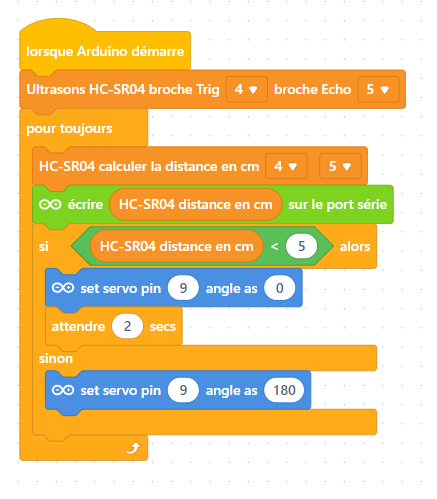
Ce programme met en œuvre un système d’ouverture automatique de couvercle basé sur la détection de proximité, typiquement utilisé pour une poubelle robotisée sans contact dans un club de robotique.
Principe général
Le code associe :
-
un capteur à ultrasons HC-SR04 pour mesurer la distance entre la poubelle et un obstacle (main, déchet, objet),
-
un servomoteur SG90 (180°) pour actionner mécaniquement le couvercle.
L’objectif est d’ouvrir le couvercle lorsqu’un utilisateur s’approche, puis de le refermer automatiquement.
Déroulement du programme
-
Initialisation au démarrage
-
L’Arduino configure le capteur HC-SR04 avec :
-
broche Trig = 4
-
broche Echo = 5
-
-
Le servomoteur est connecté à la broche 9.
-
-
Boucle de fonctionnement continu
-
Le capteur ultrason mesure en permanence la distance en centimètres devant la poubelle.
-
Cette distance est envoyée sur le port série, ce qui permet :
-
le débogage,
-
la visualisation du comportement du système,
-
l’analyse pédagogique avec les membres du club.
-
-
-
Logique de décision
-
Si la distance mesurée est inférieure à 5 cm :
-
le servomoteur est positionné à 0° → ouverture du couvercle,
-
une temporisation de 2 secondes permet à l’utilisateur de jeter le déchet.
-
-
Sinon :
-
le servomoteur est positionné à 180° → fermeture du couvercle.
-
-
Conclusion et discussion
Synthèse des compétences acquises
Compétences techniques et mécaniques
-
Conception mécanique : savoir imaginer et concevoir le mécanisme d’ouverture automatique du couvercle.
-
Assemblage de composants : apprendre à manipuler et assembler les différentes parties (couvercle, axe, moteur, composants électroniques, etc.).
-
Choix des matériaux : identifier les matériaux adaptés au projet.
Compétences en électronique
-
Découverte et câblage de capteurs permettant de détecter une présence.
-
Découverte et câblage d’un servomoteur pour l’ouverture et la fermeture du couvercle.
-
Savoir réaliser un schéma de câblage et connecter les composants sur une carte Arduino.
Compétences en programmation
-
Programmation d’un microcontrôleur Arduino : écrire un programme qui gère les capteurs, les délais et l’action du moteur.
-
Logique conditionnelle : comprendre comment programmer des conditions simples (si détection → ouverture du couvercle).
-
Optimisation du fonctionnement : ajuster les temps de réponse, la durée d’ouverture, etc.
Compétences transversales
-
Gestion de projet : planifier les étapes de réalisation, répartir les tâches et respecter les délais.
-
Résolution de problèmes : savoir réagir face aux imprévus techniques ou fonctionnels.
-
Travail en équipe.
Perspectives
-
Améliorer le projet (par exemple : ajouter une LED qui s’allume lorsqu’un objet est détecté, améliorer les pièces mécaniques, etc.).
-
Imaginer d’autres applications utilisant un capteur à ultrasons et un servomoteur ensemble.
Projet similaire
https://www.hackster.io/FANUEL_CONRAD/automatic-soap-dispenser-75abd6