CODESYS 3.5
Dans ce livre, nous verrons l'installation de CODESYS 3.5, comment utiliser un Raspberry Pi avec le Runtime CODESYS comme Master EtherCAT,
- Installation de CODESYS 3.5
- Codesys sur Raspberry PI 4
- HMI Codesys sur RPI 4
- Codesys et Master EtherCAT sur Raspberry PI
- Master IO-Link sur Raspberry Pi
Installation de CODESYS 3.5
Codesys
CODESYS https://www.codesys.com/ est un environnement de programmation PLC utilisé par plus de 400 fabricants de contrôleurs tels que ABB, Bosch, Beckhoff, Festo, Eaton, Schneider Electric, Wago.CODESYS permet de réaliser des programmes en LADDER, FBD, ST, CFC en respectant les normes CEI 61131-3 et est devenu le standard sur le marché des outils de programmation neutres.
Le produit est utilisé pour le développement des solutions logicielles dans la fabrication de machines, les engins mobiles et dans le secteur de l'énergie et des projets d'installation. Des fabricants de contrôleurs intègrent CODESYS dans leurs automates, composants d'automatisme (moteurs programmables, afficheurs, composants d'E/S) et conçoivent des systèmes embarqués avec CODESYS.
Quelques exemples :
- Automates WAGO, l'environnement de développement e!Cockpit est basé sur CODESYS 3.5 et le RunTime des automates WAGO est basé sur le RunTime CODESYS.
- Automates BECKHOFF, l'environnement de développement TWincat est basé sur CODESYS 3.5 mais le RunTime des automates semble spécifique à BECKHOFF.
- Automates SEW, basé sur CODESYS etc.
Bien que généralement très coûteux et destiné aux environnements industriels, CODESYS a publié une cible qui transforme un Raspberry Pi en un automate. La version non payante vous permet de faire fonctionner le RunTime sur le Raspi pendant 2h avant de nécessiter un reboot. Une licence payante (50€ Single Core ou 100€ Multi-Core) vous permet d'utiliser le Raspberry Pi dans un cadre industriel 24h/24.
Dans la section Automatisme du site, vous pourrez consulter cet article, pour transformer le Raspberry Pi en automate et contrôler les GPIO.
Téléchargement de CODESYS
Pour télécharger CODESYS 3.5 Codesys Telechargement
- Choisir la version 64 bits
Il vous sera demandé de créer un compte pour télécharger le logiciel:
- Choisir Individual Customer
- Vous aurez besoin de ce compte pour télécharger d'autre modules Software, ne perdez pas le login et le mdp.
A la date de cet article, on est à la version 3.5.18.20 de juin 2022.
Installation de CODESYS
L'installation de CODESYS n'est pas complexe si l'on respecte les différentes étapes:
- Accepter les termes des Licences
- Choisir une installation complète
- Faire l'installation dans le répertoire par défaut proposé (Program Files).
L'installation prend plusieurs minutes sans évolution de la barre d'avancement ! C'est normal.
- On clic sur Finish
- On effectue un redémarrage du PC pour être certain que les services associés à CODESYS soient actifs.
- CODESYS apparait dans le menu Windows
- On cliquera sur l'icône CODESYS V3.5 SP18 Patch2
That's It :cowboy-hat-face: Vous êtes prêt pour les premiers essais !
Premier essai avec CODESYS 3.5
Lancer CODESYS v3.5 SP18 depuis le menu démarrer:
- On crée un nouveau Projet avec File-> New Project
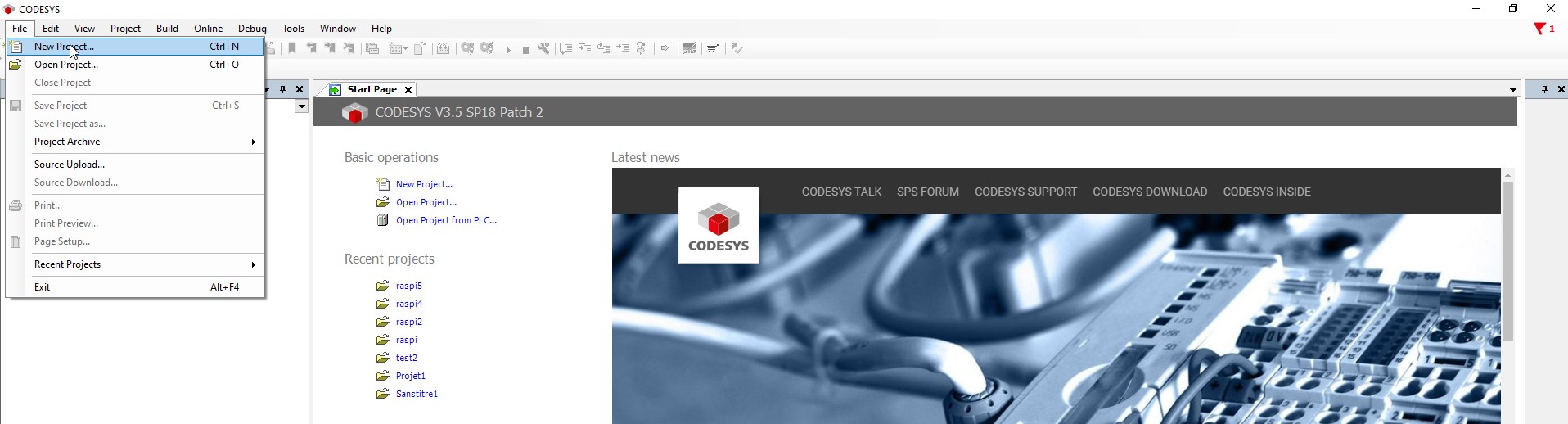
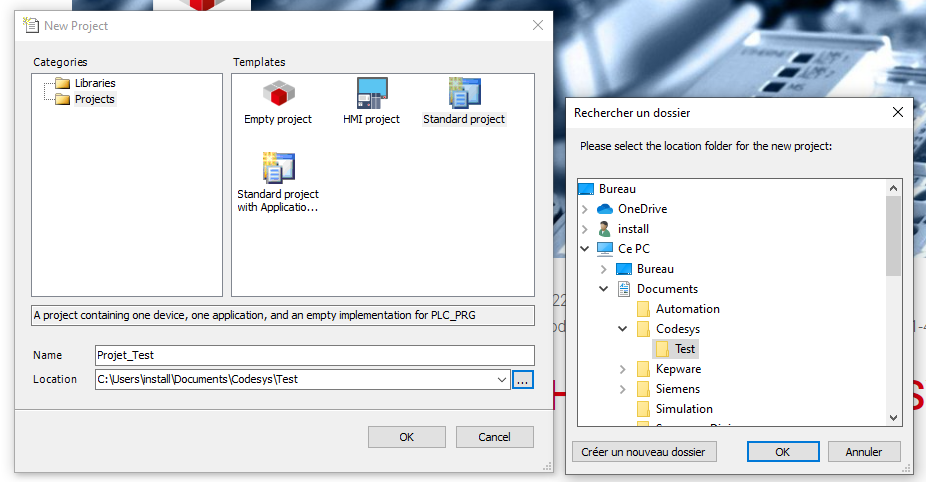
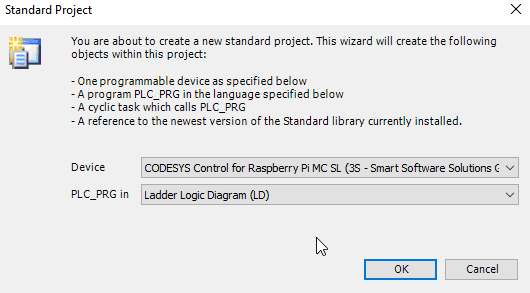
- Choisir Standard Project
- Créer un dossier Codesys dans Mes Documents
- dans ce dossier Codesys, créer un dossier Test
- l'on enregistrera notre projet nommé Projet_Test
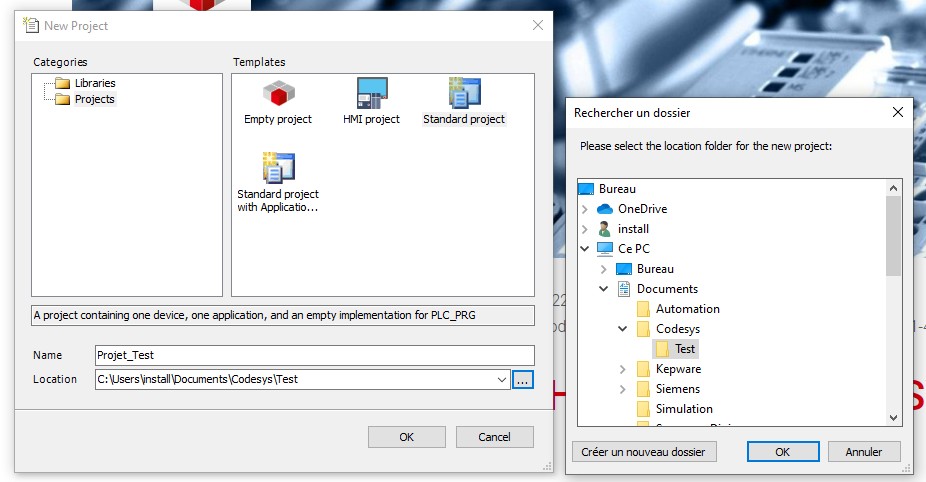
- Dans Device, choisir CODESYS Control Win V3 x64
- Choisir pour le programme Main PLC_PRG le langage Ladder (LD)
Programmation Ladder
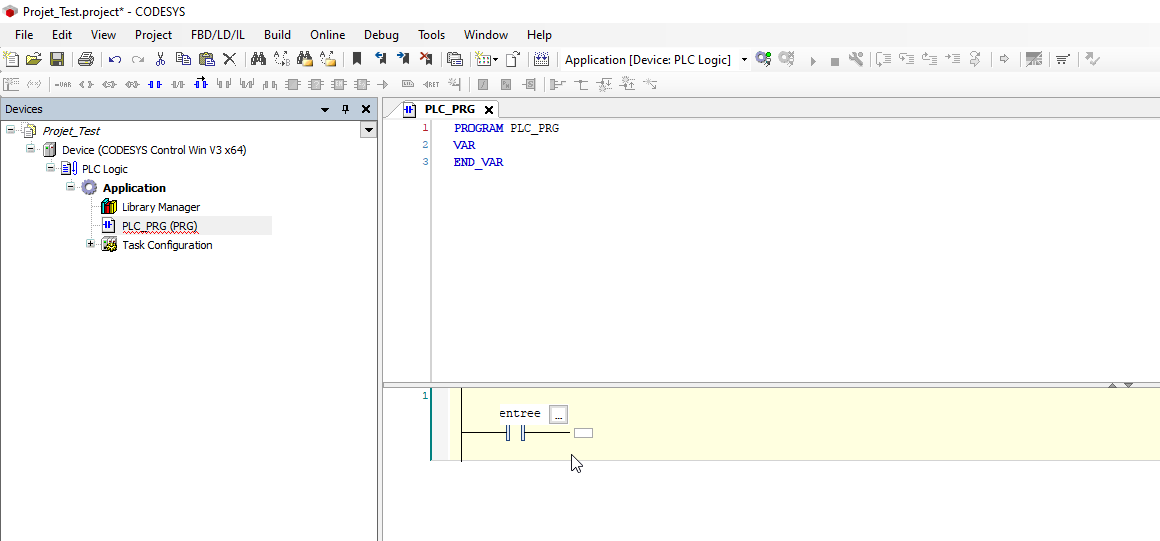
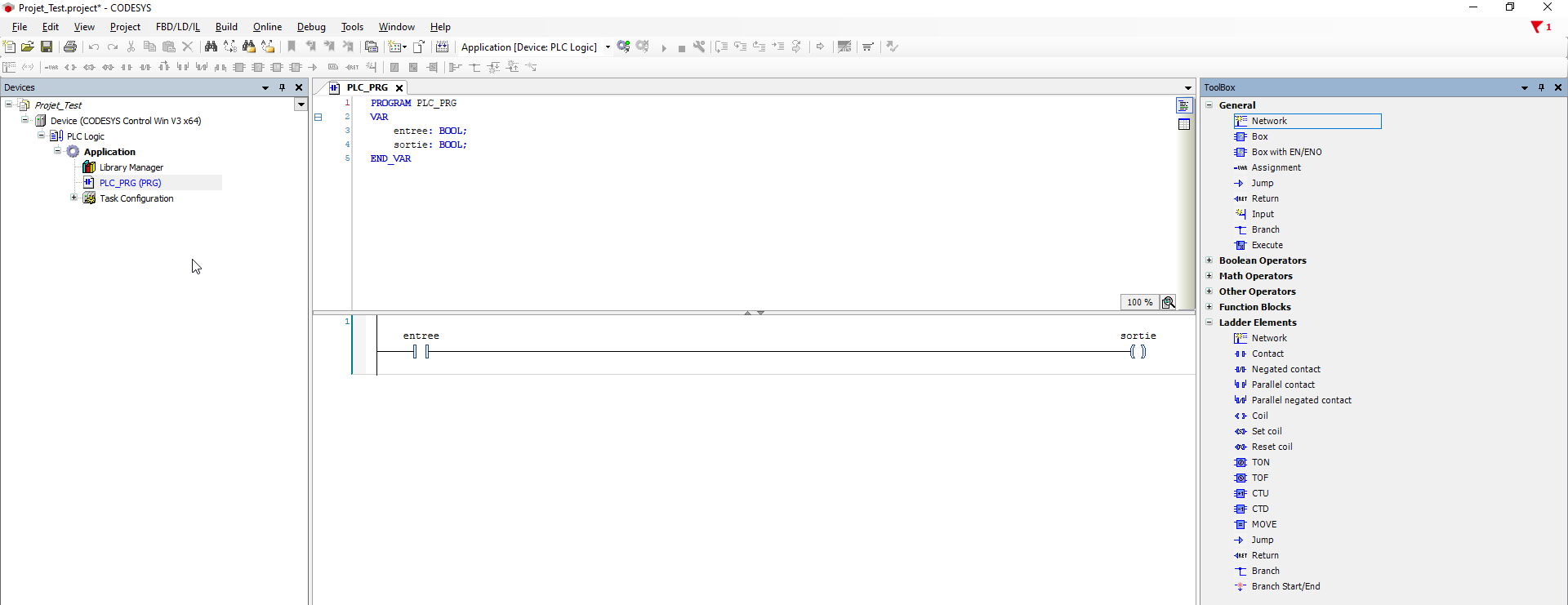
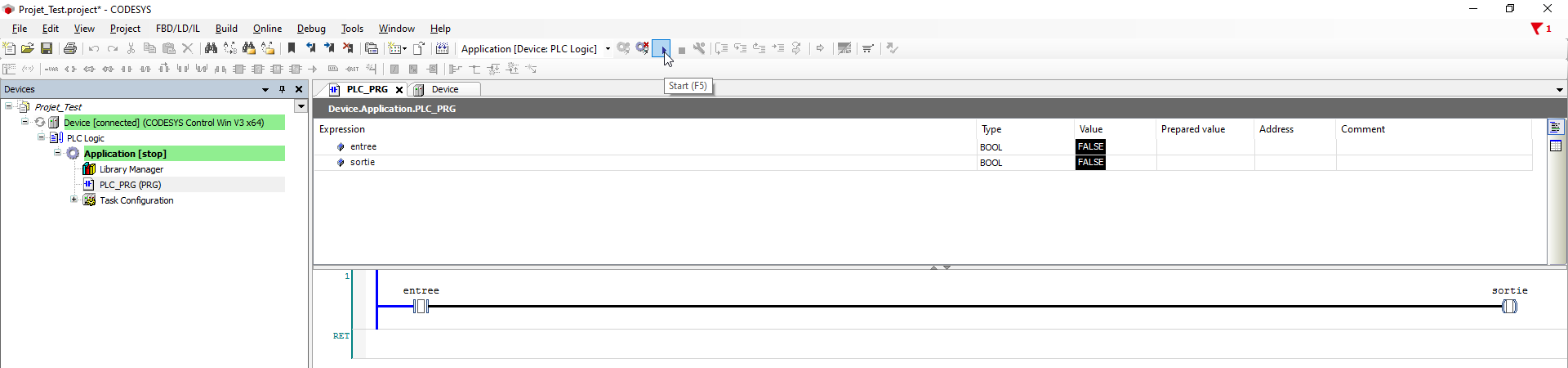
On souhaite créer un premier programme très simple avec un Contact NO que l'on nommera entree en série avec une bobine que l'on nommera sortie. Les outils de contacts sont présents dans la barre de menu haute et dans la fenêtre latérale droite.
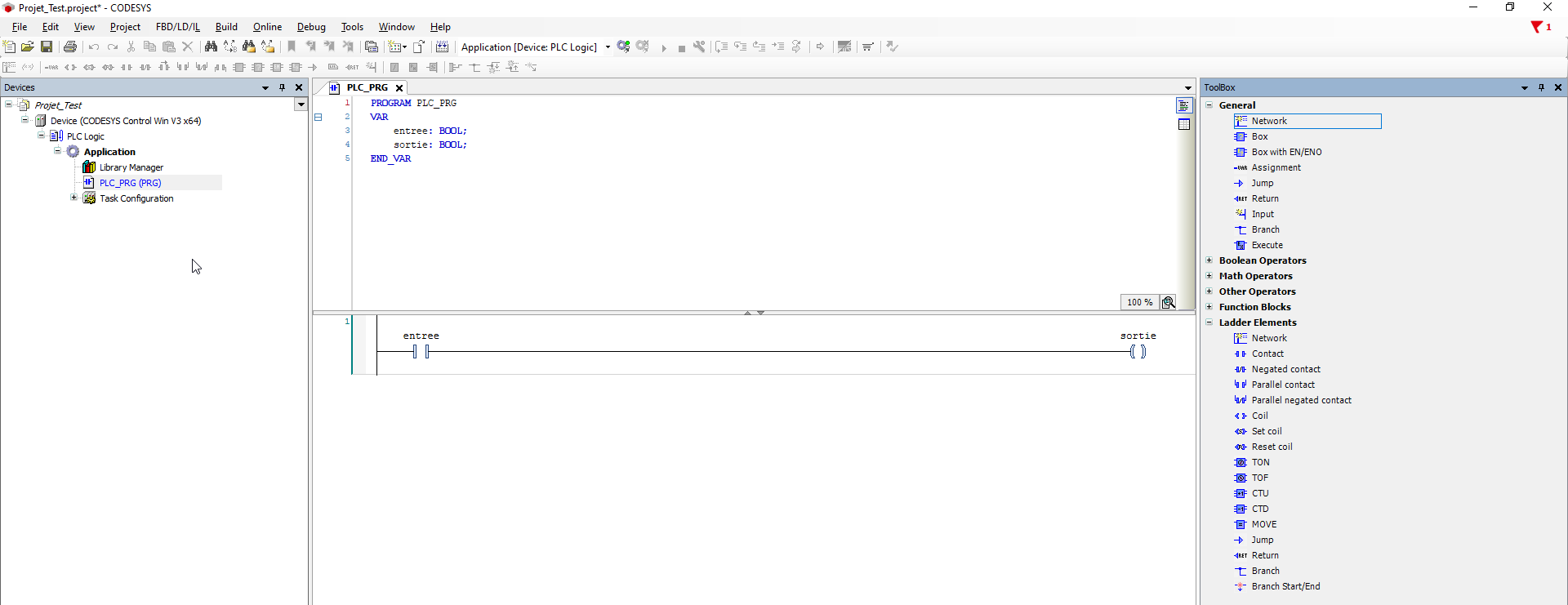
- Quand on place le Contact NO, on le nommera entree, en appuyant sur la Entrée du clavier, une fenêtre s'ouvre pour générer la variable entree en tant que BOOL.
- Faire OK
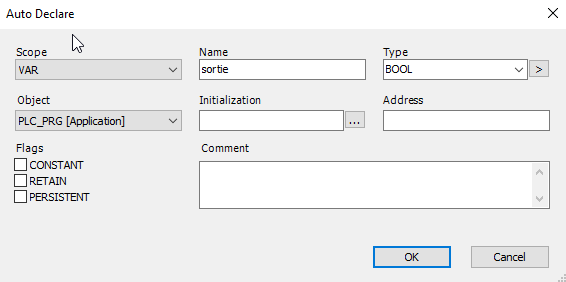
- On place la bobine, qu'on nommera sortie, en appuyant sur la Entrée du clavier, une fenêtre s'ouvre pour générer la variable sortie en tant que BOOL.
- Faire OK
- Nous pouvons maintenant faire un Generate du Code (touche F11)
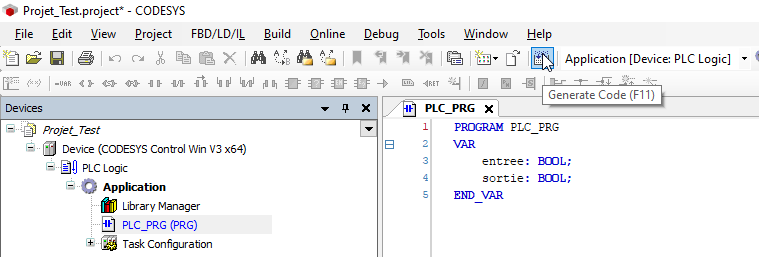
- Normalement, vous ne devez pas avoir d'erreurs au niveau des messages fournis durant la compilation. On peut passer à la suite.
Instance PLC Soft
On va maintenant lancer le Runtime sur notre PC qui va exécuter le code Automate compilé. C'est notre PC qui va ainsi jouer le rôle de Soft PLC. Ce qui est limitant avec le PC, c'est qu'il est impossible de brancher directement des capteurs industriels, cependant, nous pouvons ajouter par bus de terrain EtherCat/ModbusTCP/EthernetIP/Profinet des E/S déportées qui se chargeront de récupérer les données capteurs ou piloter des Variateurs. L'avantage, c'est que l'on profite de la puissance Processeur du PC pour faire des applications complexes.
- Avantage : un PC portable peut remplacer une gamme d'automates classiques
- Inconvénient : un PC portable est fragile dans une armoire électrique, d'où les IPC, c'est à dire Industrial PC
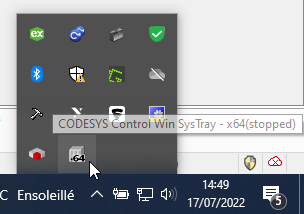
Lancer l'instance Soft PLC
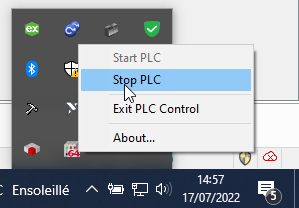
Dans la barre des îcones cachées,
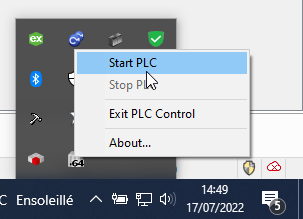
- on clique sur l'îcone .64
- et l'on fait Start PLC
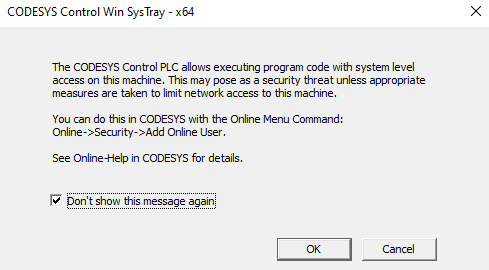
- On valide le lancement et l'on coche l'option pour ne plus afficher le message
Transférer le Programme depuis Codesys
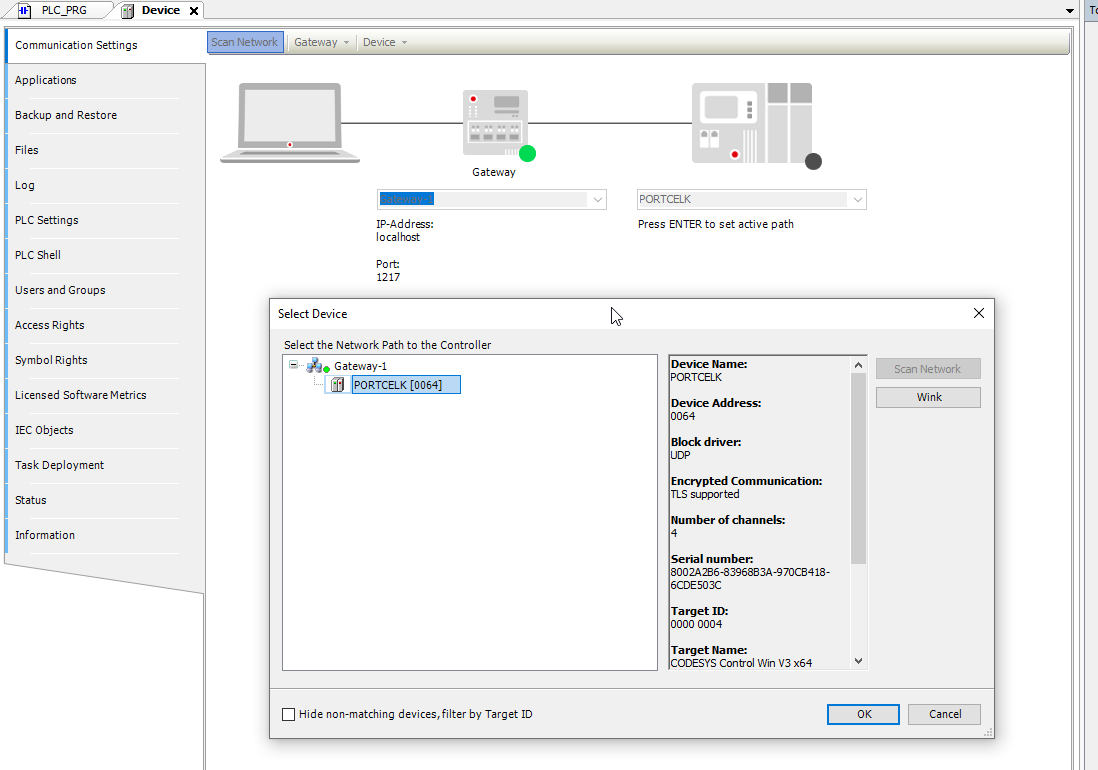
- Double cliquer sur Device dans votre Arborescence de projet Codesys
- Une fenêtre de configuration de connexion s'ouvre
- Pour la Gateway, vérifier que vous êtes sur Localhost et le port 1217
- Pour trouver le RunTime PLC lancé précédemment, il fait faire une recherche
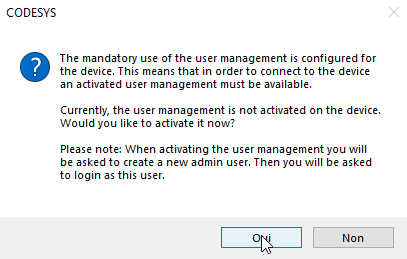
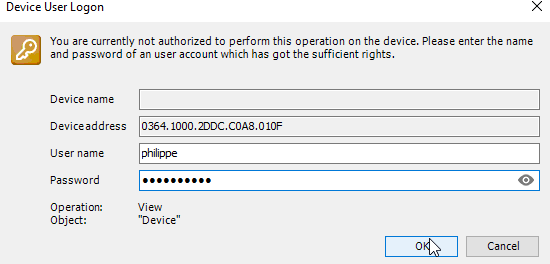
- Codesys impose la création d'un compte ayant les droits de programmer l'instance PLC lancée
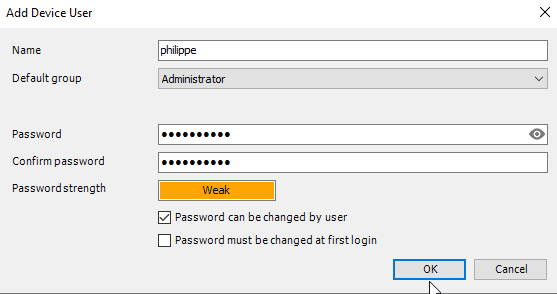
- créer un login avec un mdp (ici login: philippe et mdp=votre_mdp)
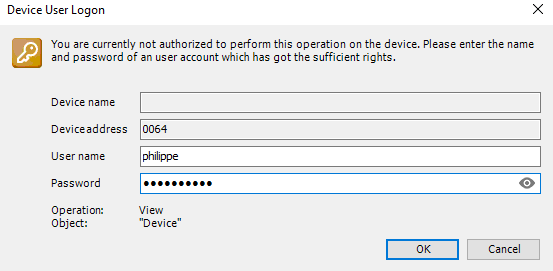
- Codesys demande le login crée précemment
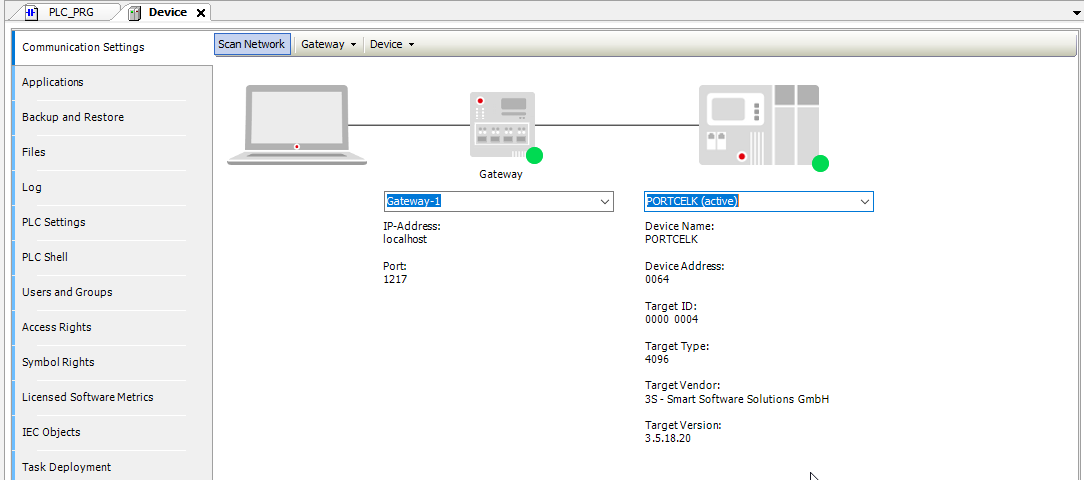
- La cible Soft PLC apparaît en vert avec des informations sur le Runtime en texte
- On peut maintenant se Connecter sur le Runtime Soft PLC en cliquant sur Login (Alt+F8)

- On confirme le transfert du code compilé vers le Runtime Soft PLC
Test du programme
- On clique sur START (F5)
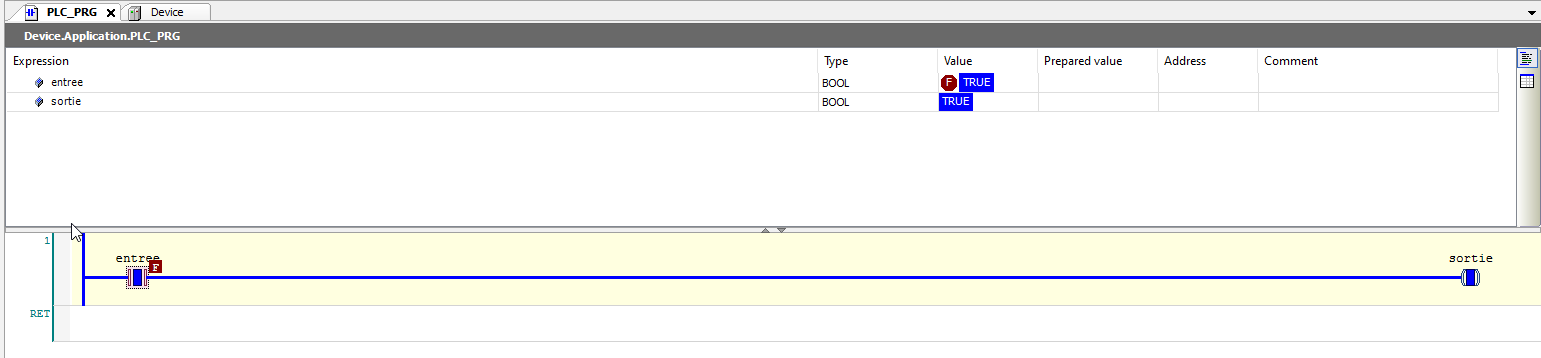
- On peut maintenant Forcer l'entrée entree en double cliquant dessus
- On fait F7 pour appliquer le forçage
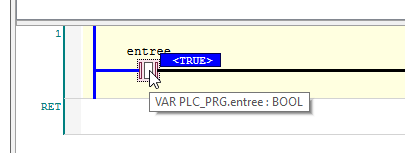
- On remarque que la sortie s'active
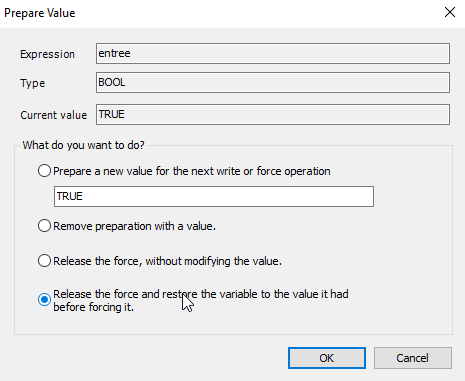
- On peut supprimer le forçage en faisant un release à la valeur de départ
- On peut Stopper le Runtime Soft PLC en faisant STOP (SHIFT + F8)

- On peut faire le Logout en faisant (CTRL + F8)

- On peut stopper le Runtime Soft PLC en cliquant sur l'icône .64 Stop PLC
Conclusion
Nous avons vu dans ce premier essai comment déployer un code automate dans un Runtime PLC sur PC. Nous verrons par la suite comment
- déployer un Runtime PLC sur Raspberry Pi 4
- intégrer des E/S déportées communicant en Ethercat, ModbusTCP et Profinet au Runtime PLC sur PC
Codesys sur Raspberry PI 4
Le Runtime Codesys pour Raspberry Pi
Présentation
Codesys fournit un Runtime pour cible Raspberry Pi afin de le transformer en Automate exécutant du code Ladder / FBD / CFC et sur lequel nous pouvons piloter les GPIO.
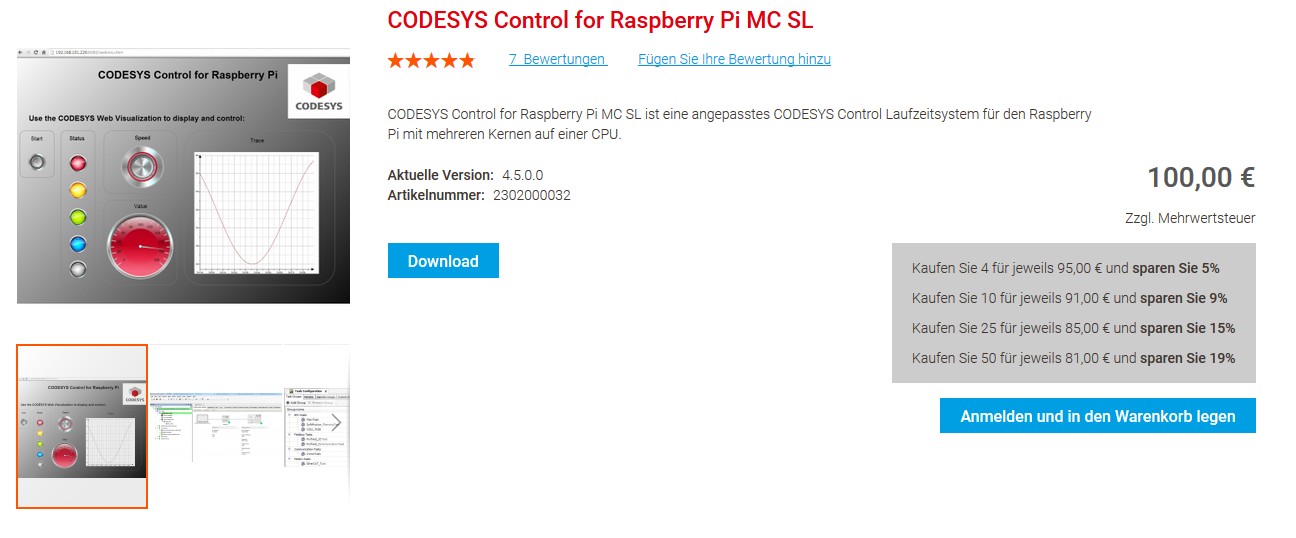
- Le plugin peut se télécharger ici
- Il est nécessaire d'avoir un compte Codesys (gratuit)
- Le Runtime est gratuit mais il stoppe au bout de 2h ce qui nécessite un redémarrage (pas gênant pour un TP, inutilisable en production)
- Si vous souhaitez le Runtime sans la limite des 2h, il vous coûtera 100€ pour une clé de licence à demander directement chez Codesys
Avis perso :
Il est tentant de se dire, qu'avec ce plugin à 100€ + un Raspberry Pi 4 à 50€, on peut atteindre des performances équivalentes à un système IPC à 2k€ chez Siemens ou autre sauf que :
- Un Raspberry Pi n'est pas durci pour résister à un environnement industriel (pas de garantie)
- Pas de possibilité de connecter des cartes I/O simplement, il faut passer par un bus de terrain de type Ethernet ou alors mettre des adaptateurs 0/24V sur les GPIO.
- De base, les performances temps réels ne sont pas garanties. (L'OS de la Raspberry Pi n'est pas patché RealTime ou Xenomai)
- Par contre, on peut intégrer facilement en plus des outils de type MQTT, NodeRed, Grafana car le Raspi possède une forte puissance de calcul face à un automate classique.
Malgré les limitations, des industriels parient sur ce type d'outils en production avec un applicatif qui nécessiterait normalement du matériel beaucoup plus coûteux. Dans le cadre d'un projet étudiant ou d'un POC, il s'agit d'un outil adapté et c'est toujours valorisant pour un étudiant de BUT GEII de pouvoir dire à un entretien qu'on a réalisé son propre IPC basé sur un Runtime Codesys sur cible Raspberry Pi 4.
Installation du Runtime Raspberry Pi sur Codesys
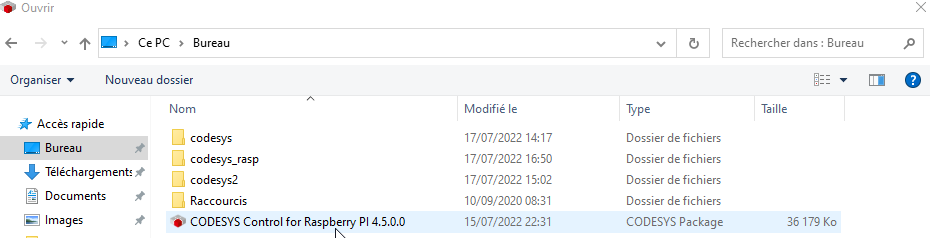
- Pour installer l'AddOn, faire Tools -> CODESYS Installer

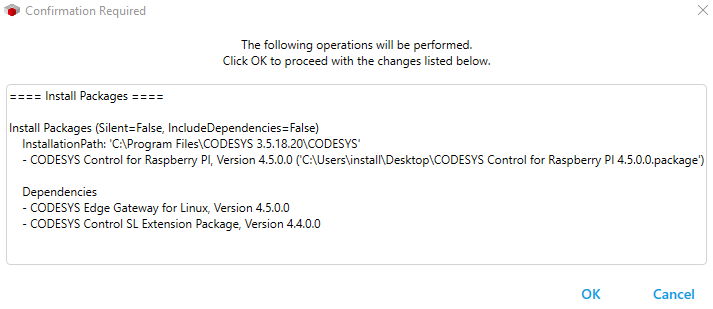
- Cliquer sur Install File
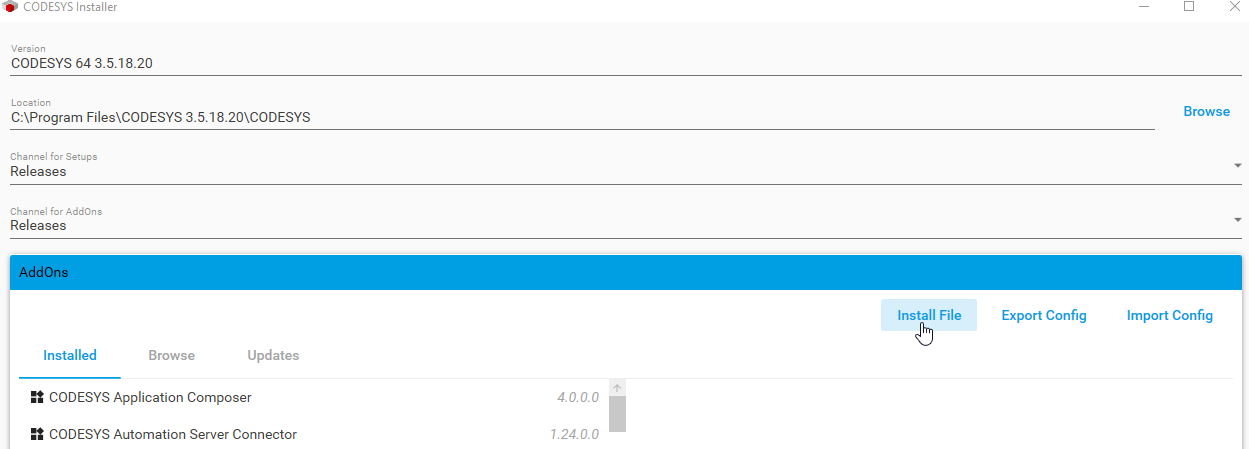
- Sélectionner le fichier téléchargé précedemment
-
On ferme le logiciel Codesys en arrière Plan et l'on fait OK |
 |
| |
|:------------------------------------------------------|------------------------------------------------------:|
|
|:------------------------------------------------------|------------------------------------------------------:| -
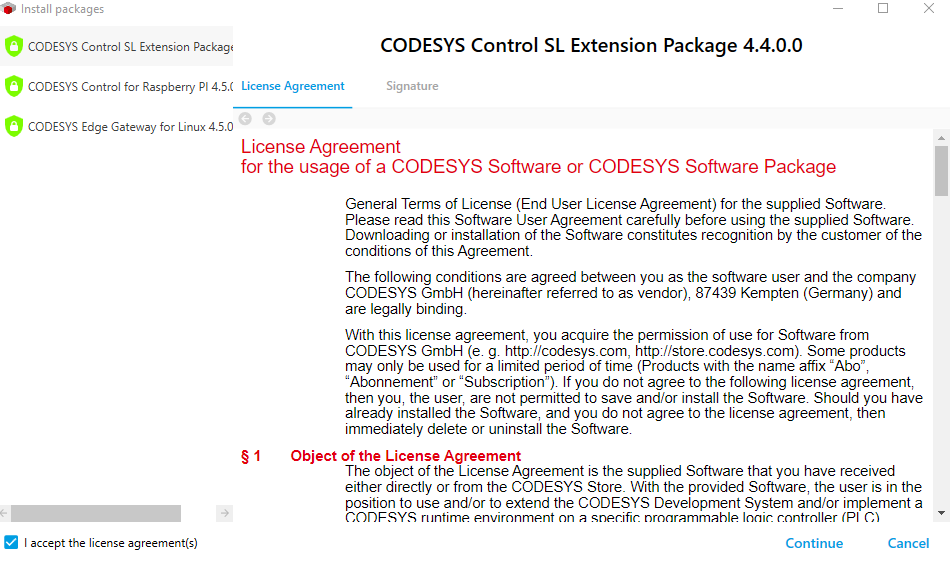
On coche I accept the license agreements et normalement l'AddOn est correctement installé. On peut passer à la création d'un Projet pour le Raspi.
Projet Codesys sur Raspberry Pi 4
Arborescence de projet
- On crée un Standard Project nommé Test_Raspi
- Enregistré dans le dossier Codesys\Raspi à créer
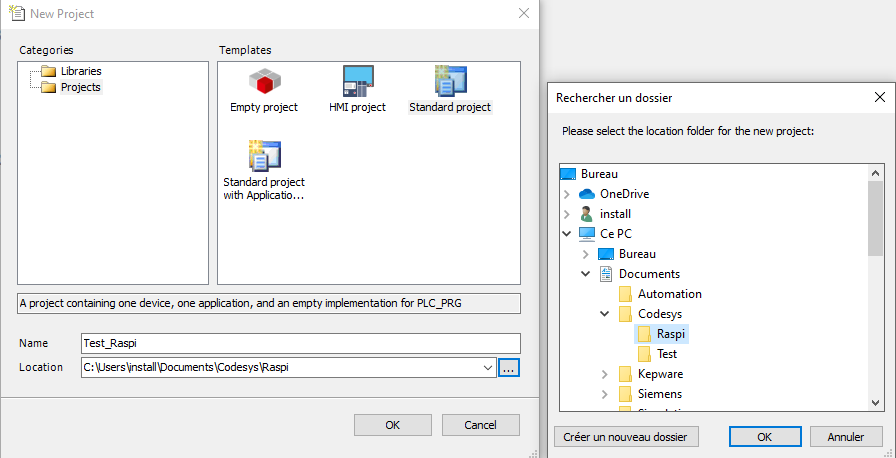
- Pour Device, on choisit CODESYS Control for Raspberry Pi MC SL
- PLC_PRG : en Ladder (LD)
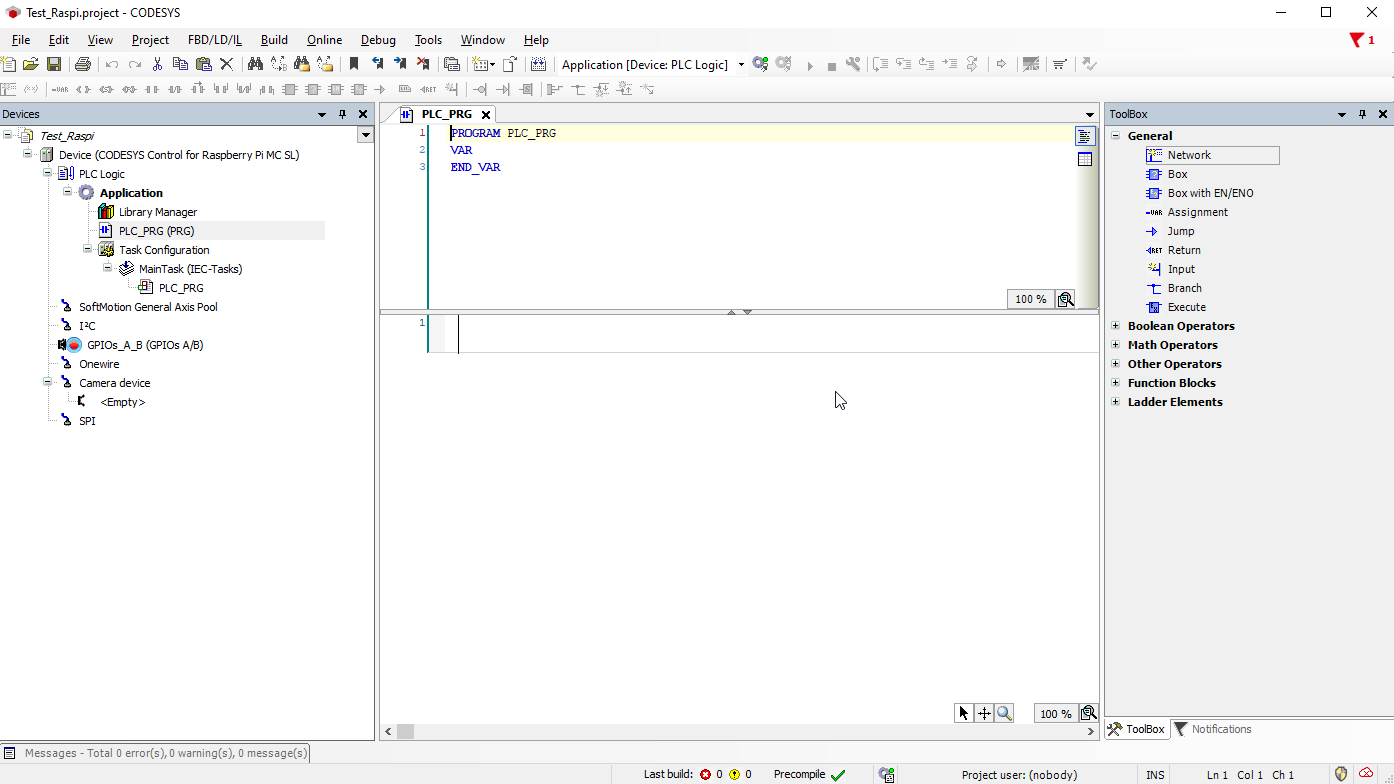
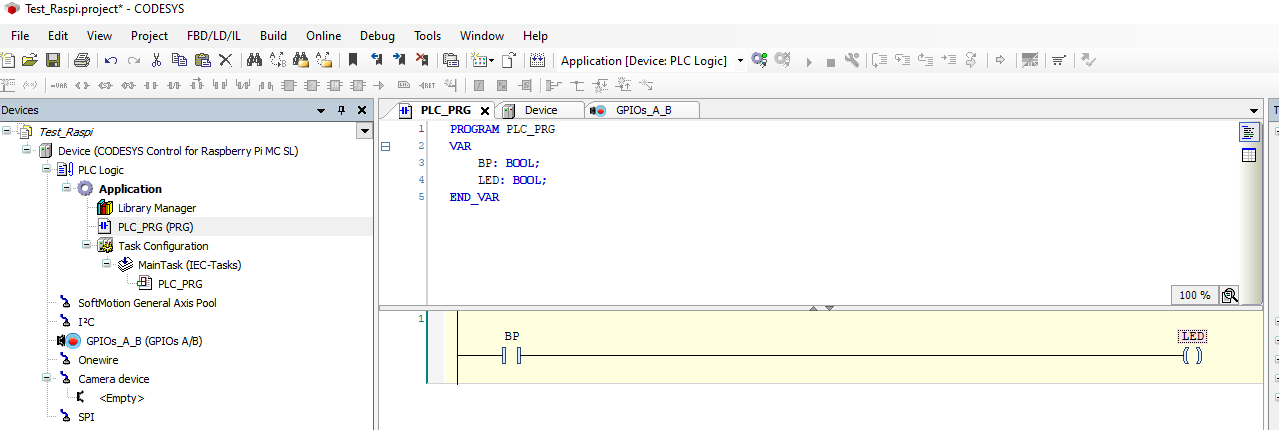
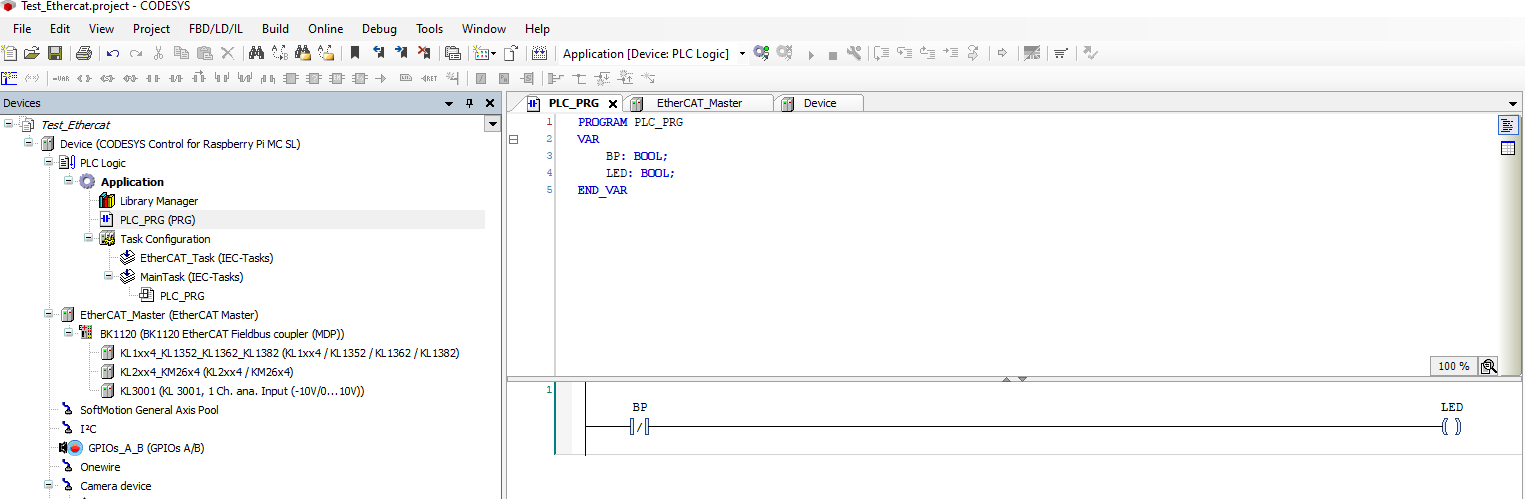
- On obtient l'arborescence de projet suivante :
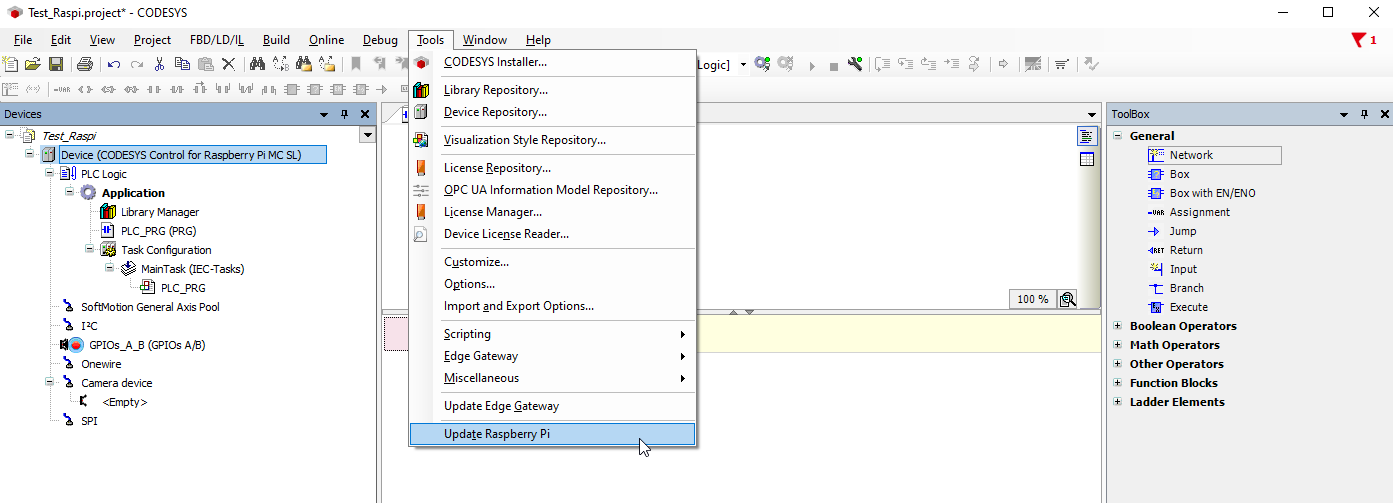
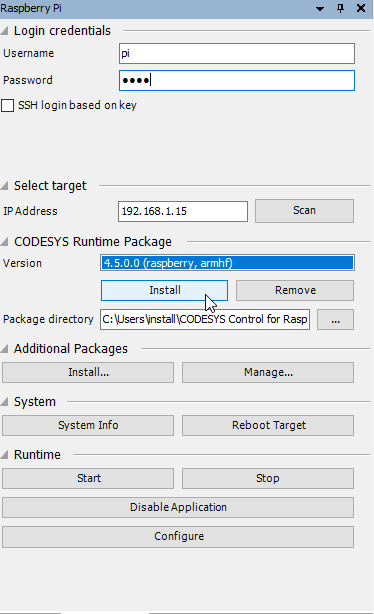
Update du Raspberry Pi
- On fait un update du Raspberry Pi dans Tools -> Update Raspberry Pi
- On met le username du Raspi : pi
- On met le mdp : xxxx
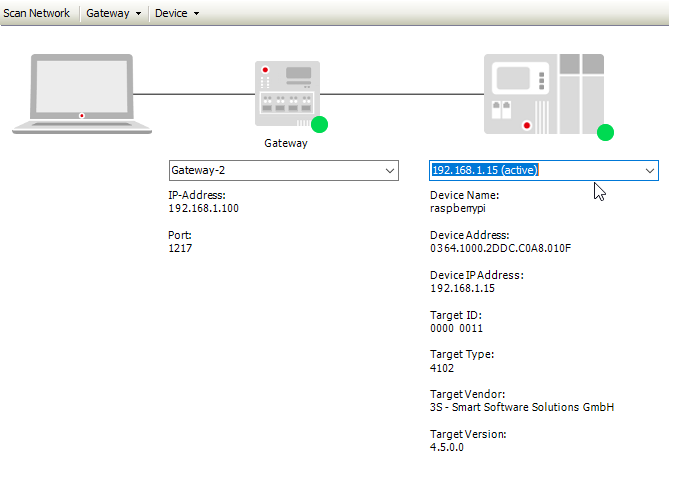
- On met l'adresse IP du Raspberry Pi : 192.168.1.15 (on peut également faire un scan)
- On clique sur Install
- On vérifie le System Info que des données apparaîssent (bug sinon)
- On clique sur Configure
- La création d'un User peut être demandé avec un login et un mdp pour avoir l'autorisation de transférer du code sur l'automate. Perso, j'ai choisi le même login et mdp que pour le Raspi.
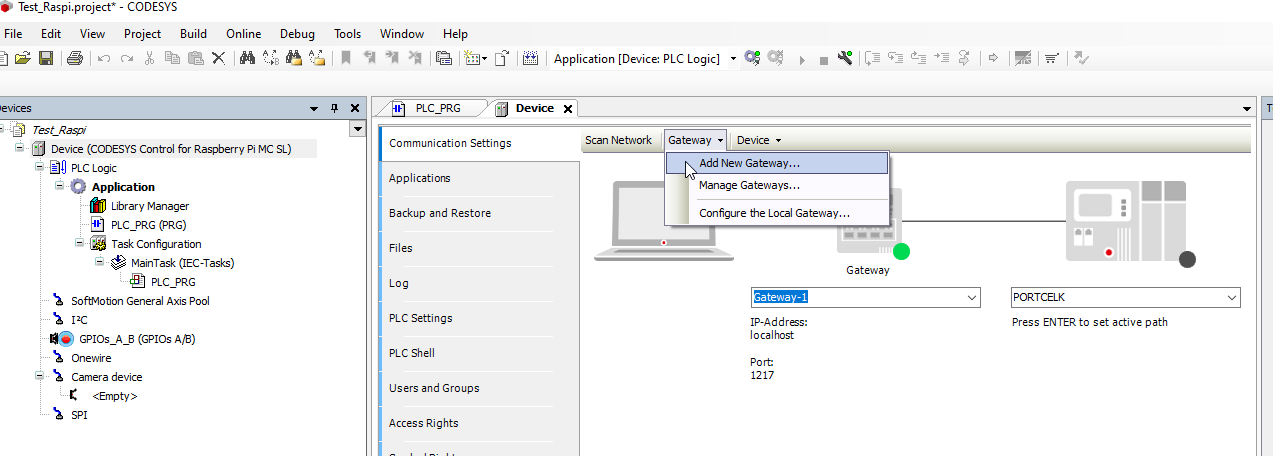
Connexion et Gateway
-
On double clique sur Device
-
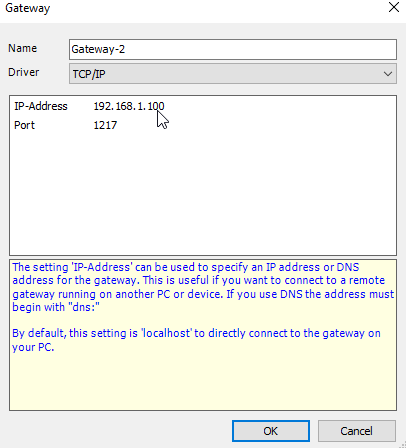
Il faut créer une nouvelle Gateway correspond à la carte réseau sur laquelle est branchée votre Raspberry Pi

-
L'adresse IP de la carte Ethernet était dans cet exemple de 192.168.1.100 (à adapter selon votre config)
-
On place l'adresse IP de votre Raspberry Pi à côté de la Gateway et l'on appuie sur la touche entrée
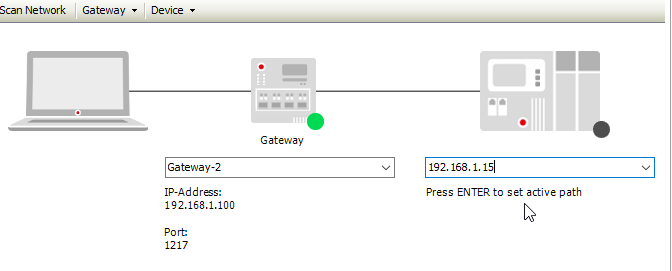
- On remet le login et mot de passe qui permet de transférer le code PLC sur la cible Raspberry Pi
- La cible passe au vert avec du texte en-dessous
- On est OK pour la suite
Programme de test Raspberry Pi
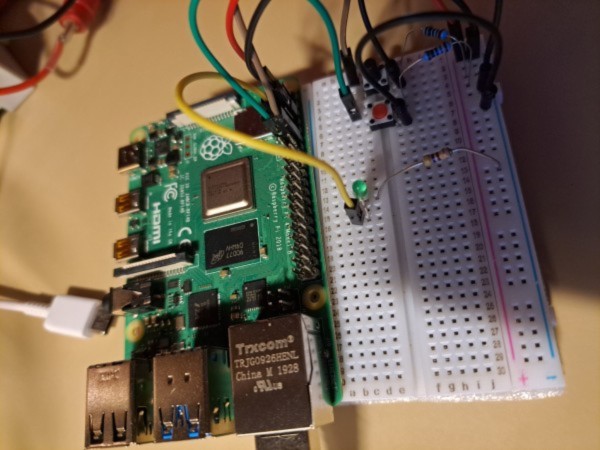
Nous souhaitons faire dans ce programme de test un pilotage de LED à partir d'un Bouton Poussoir :
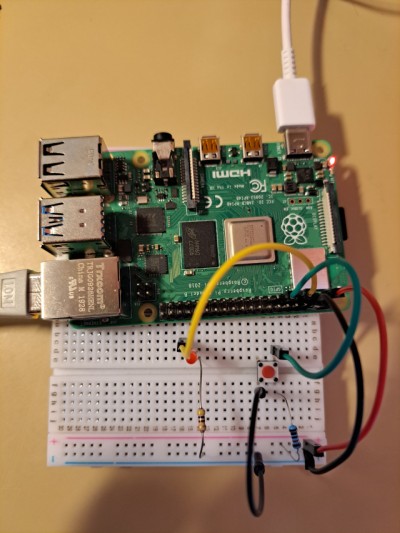
- Le BP est branché en Pull-Up ce qui signifie qu'à l'état de repos, il envoie 3.3V, à l'état actif, il envoie 0V
- Le BP est branché sur la GPIO 17
- La Led est branchée sur la GPIO 4
- Voici le programme crée pour piloter la LED
- Comme le BP est actif à l'état de repos, on aura la LED qui sera allumée, si on appuie sur le BP, la LED s'éteindra
- Il faut maintenant affecter les GPIO aux variables BP et LED
- On configure GPIO 4 comme Output pour la LED
- On configure GPIO 17 comme Input pour le BP

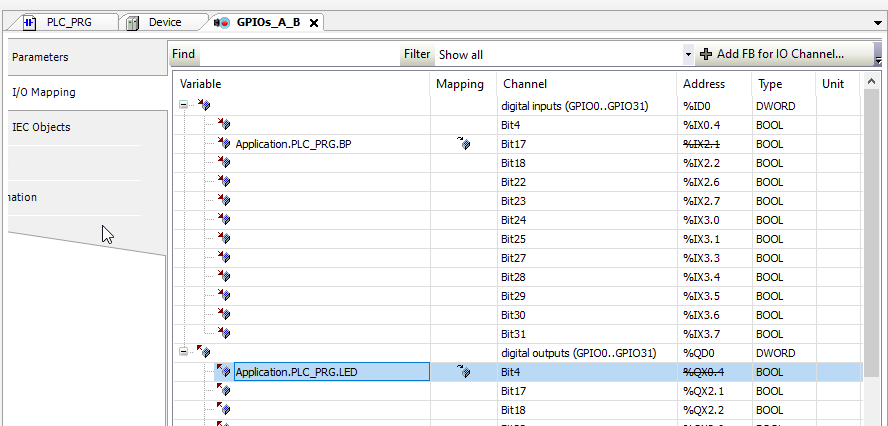
- Dans I/O Mapping on affecte la variable BP au Bit 17 pour Digital Input
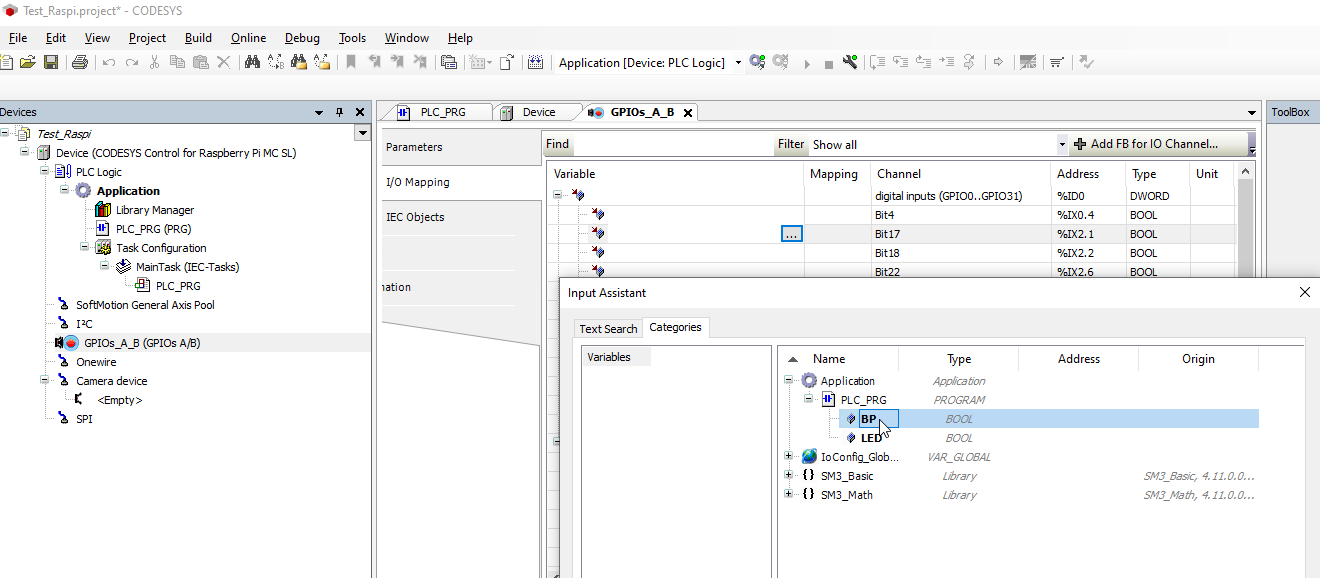
- De manière équivalente on affecte la variable LED au Bit 4 pour Digital Output
Test
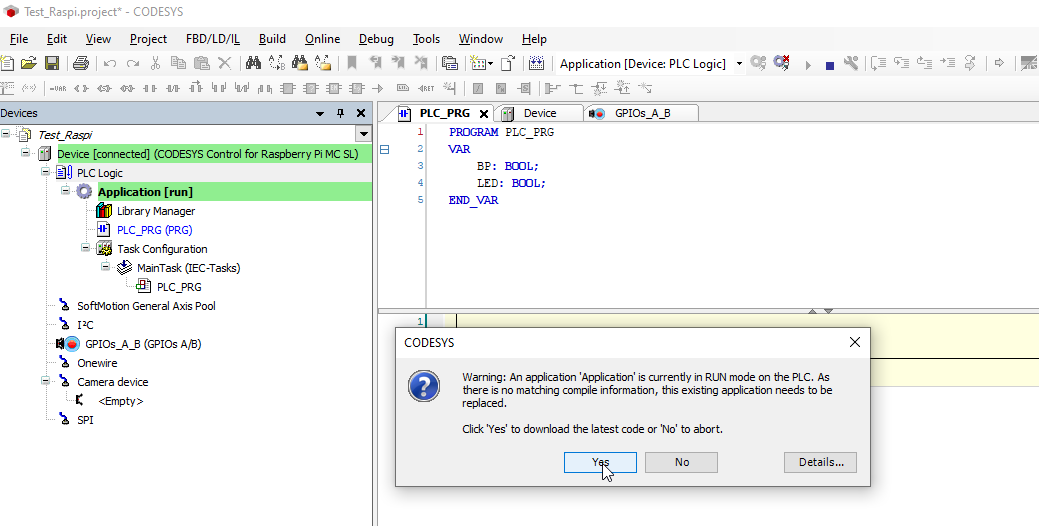
- On fait Generate Code (F11)
- On fait Login (Alt+F8)
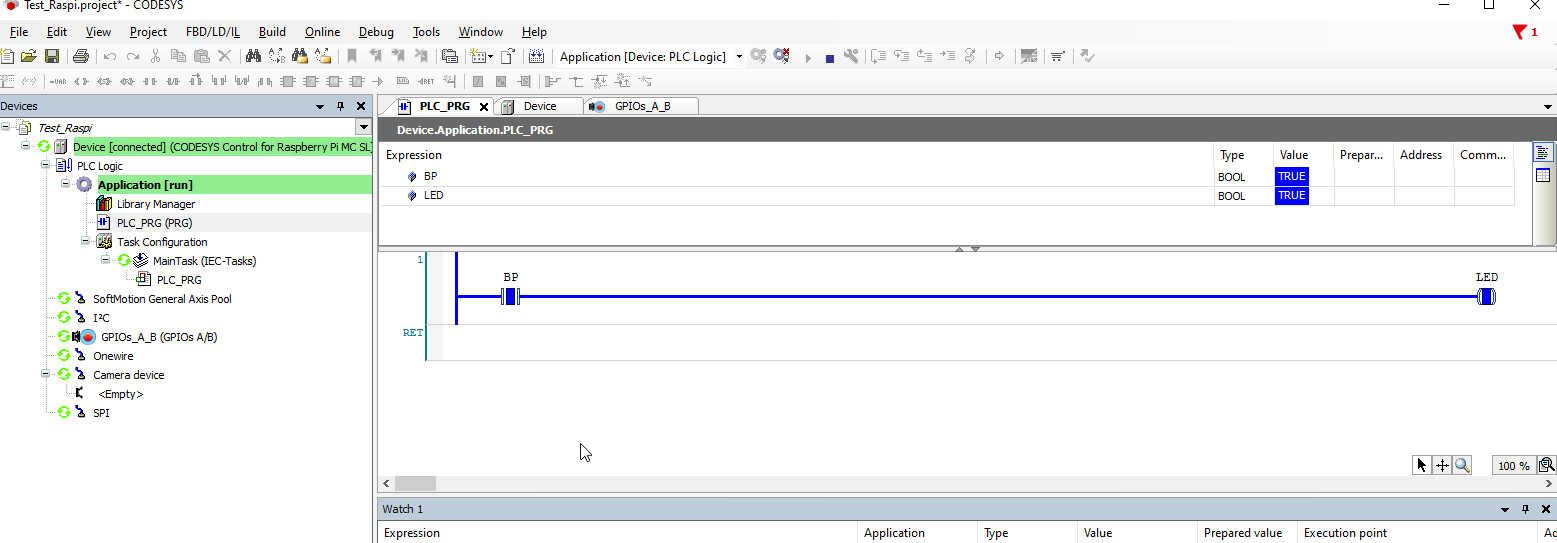
- On fait START (F5)
- On remarque que la LED est automatiquement allumée, ce qui est conforme au comportement attendu
- Quand on appuie sur le BP, la LED s'éteint (conforme aussi)
- Vous venez de créer un Automate avec un Raspberry Pi -> Bravo !
HMI Codesys sur RPI 4
HMI Codesys sur RPi 4
Après avoir porté le Runtime Codesys sur un Raspberry Pi 4 et fait notre premier programme Ladder, nous allons dans cet article présenter la mise en oeuvre d'une HMI. Dans Codesys, l'HMI est configurable sous forme de serveur WEB et il suffit d'un PC ou Smartphone ou Tablette avec un navigateur Web pour interagir avec l'HMI.
Dans ce guide, nous allons simuler un programme de Marche-Arrêt de Moteur. Le système simulé est constitué de 4 BP et d'une sortie GPIO qui permet d'alimenter le contacteur Moteur.
Interfaces :
- 1 BP_START attaché sur la GPIO17 du RPi
- 1 START_HMI, il s'agit d'un BP virtuel qui se trouve sur le panel HMI
- 1 BP_STOP attaché sur GPIO18 du RPi
- 1 STOP_HMI, il s'agit d'un BP virtuel qui se trouve sur le panel HMI
- 1 sortie MOTEUR (Led Verte), attaché à la GPIO4 du RPi
Intégration de l'HMI
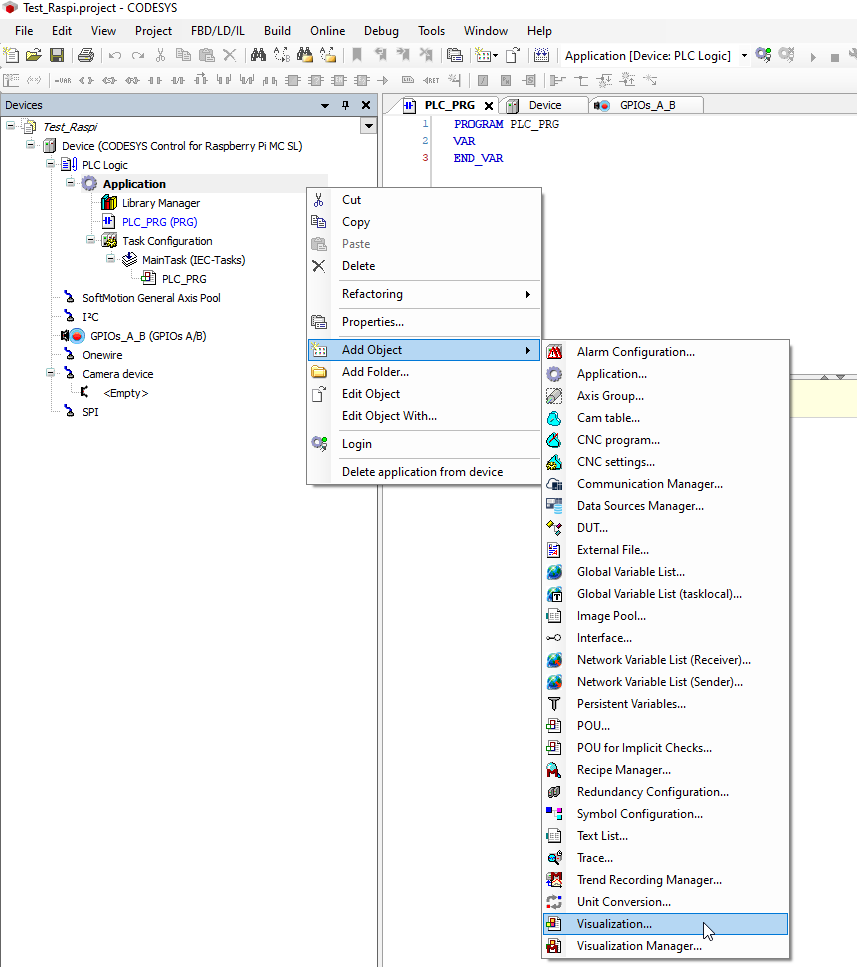
- On clique droit sur Application -> Add Object -> Visualization (On laisse le nom par défaut)
- Dans Lampe/Switches glisser une Lamp sur la zone de visu
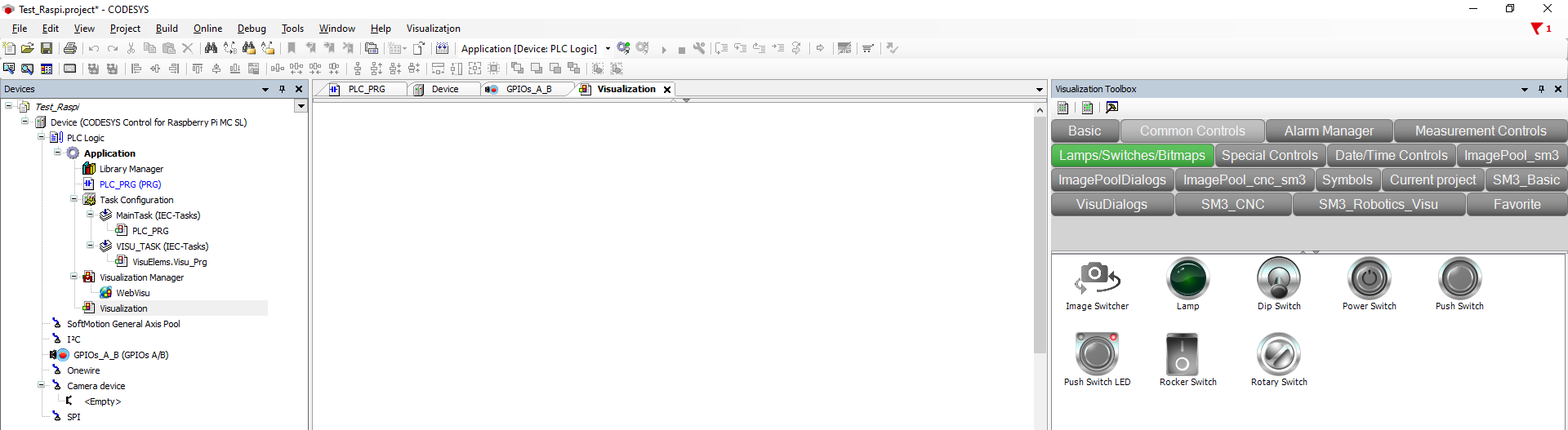
- Dans Background -> Image modifier la couleur de la Lamp en Green
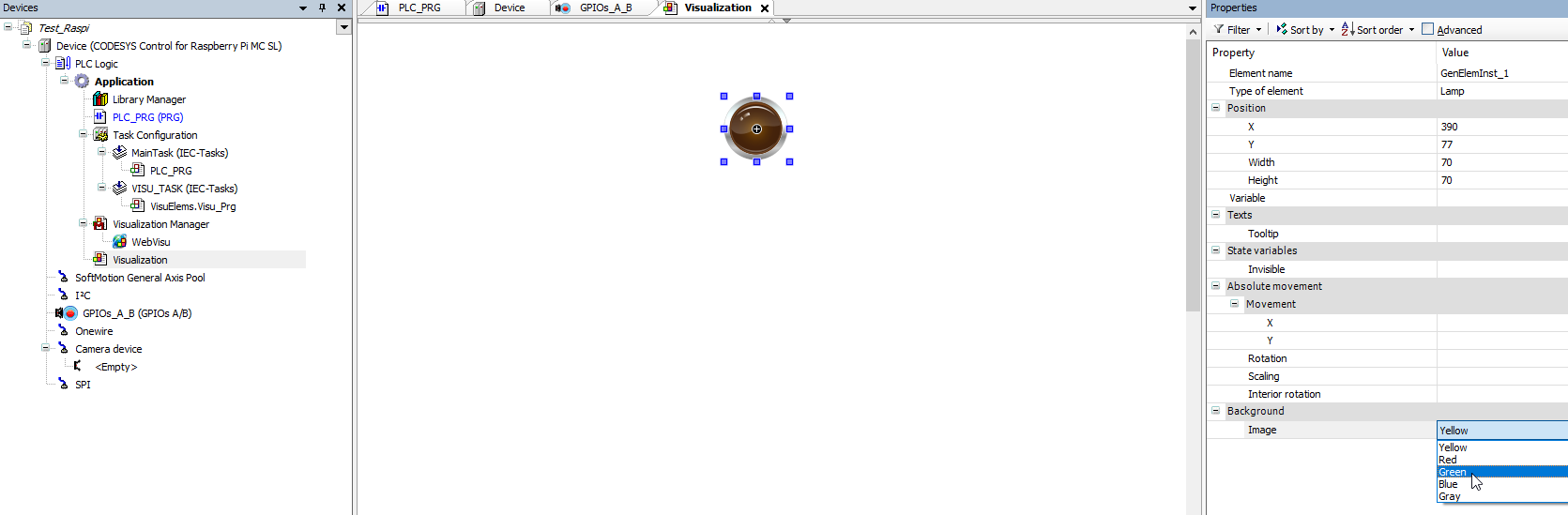
- Positionner des Power Switch pour Marche et Arret, le texte se place avec Common Controls -> Label

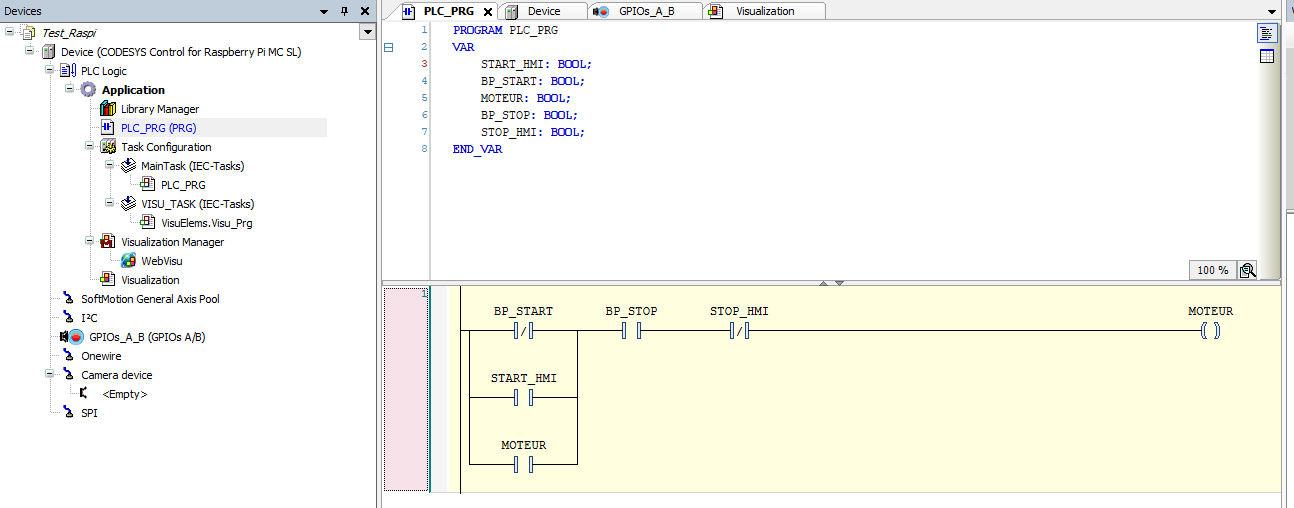
Programmation Ladder et Configuration des GPIO
- Voici le code Ladder pour un Marche-Arrêt avec Arrêt prioritaire. Attention au fait que les BP START et STOP branchés sur les GPIO du RPi sont en Pull-Up, c'est à dire à l'état Haut au repos.
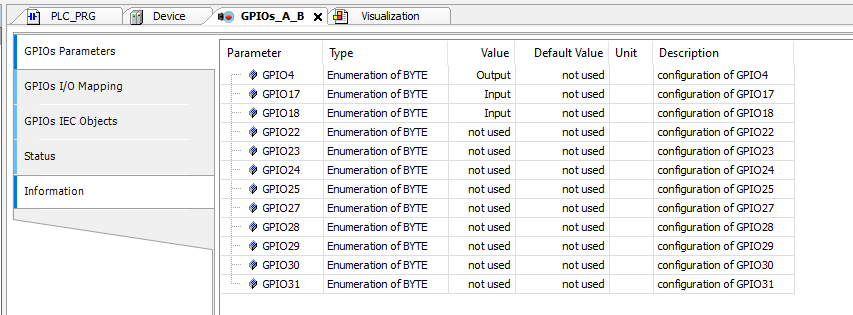
On configure
- GPIO 4 en Output (Moteur)
- GPIO 17 en Input (START)
- GPIO 18 en Input (STOP)
- On réalise le Mappage mémoire
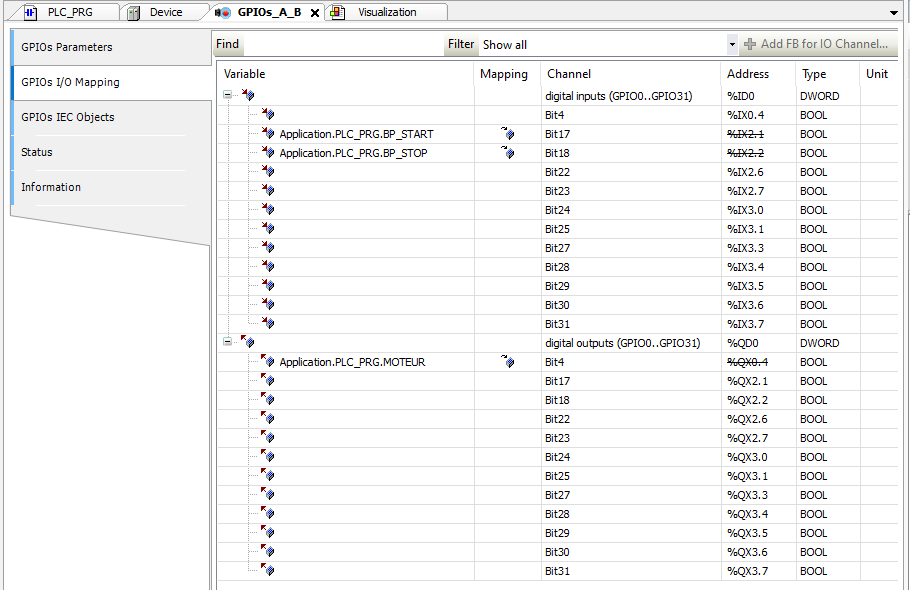
Affectation des variables HMI
- On affecte la variable HMI en cliquant dans le champ variable du BP Arret sélectionné et en cherchant la variable STOP_HMI.
- Si l'on connaît un peu la programmation orientée objet, la variable STOP_HMI est associée au programme PLC_PRG -> vu des autres programmes, il s'agit de la variable PLC_PRG.STOP_HMI
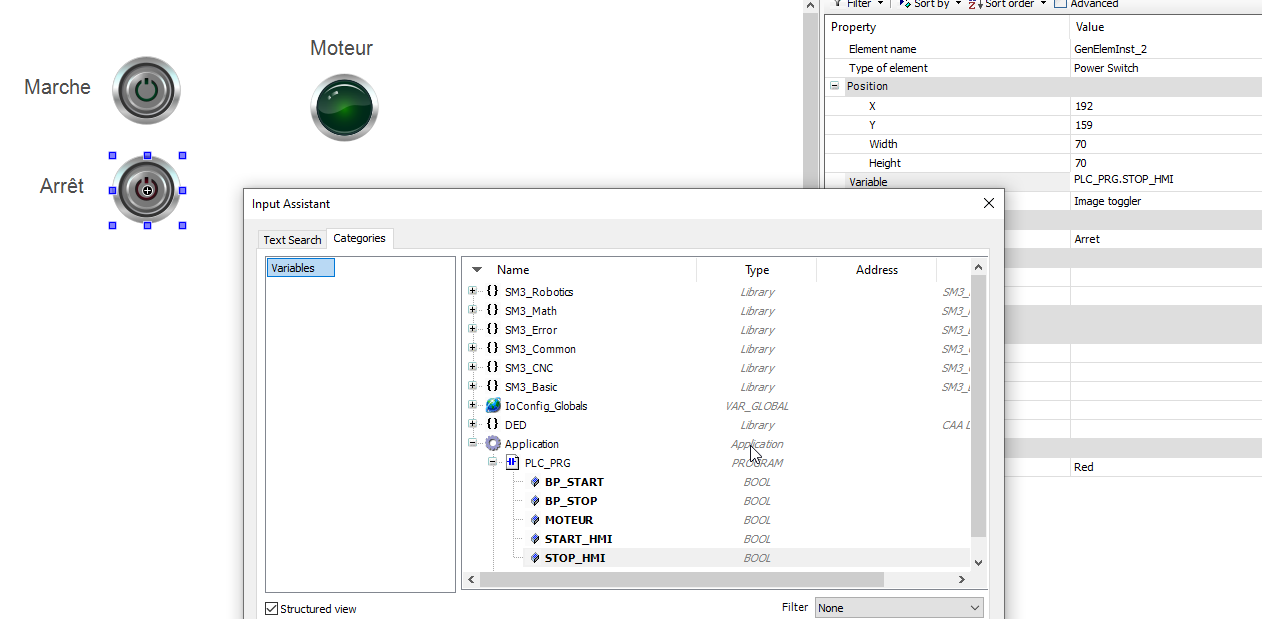
- On fait de même pour la variable START_HMI et pour le MOTEUR

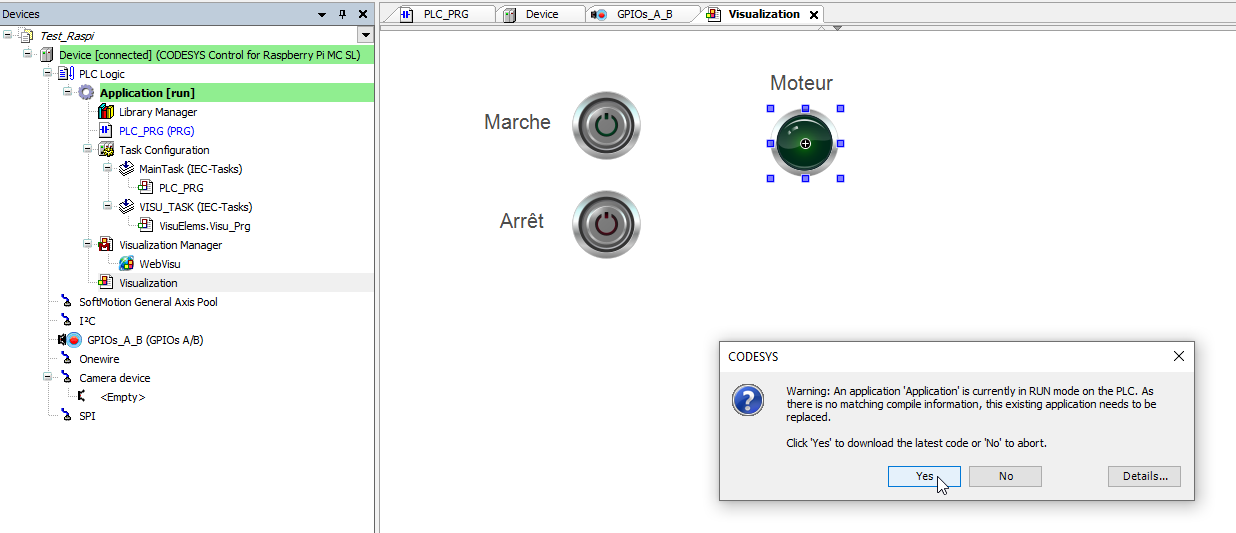
- On fait Generate, puis Login, puis Start (on accepte le chargement du programme dans le RPi)
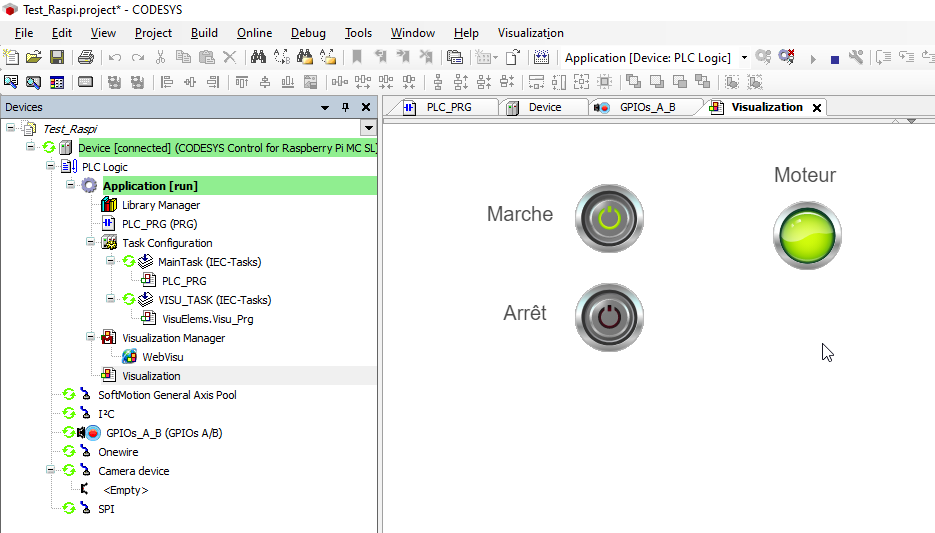
- On peut tester depuis la visu Codesys
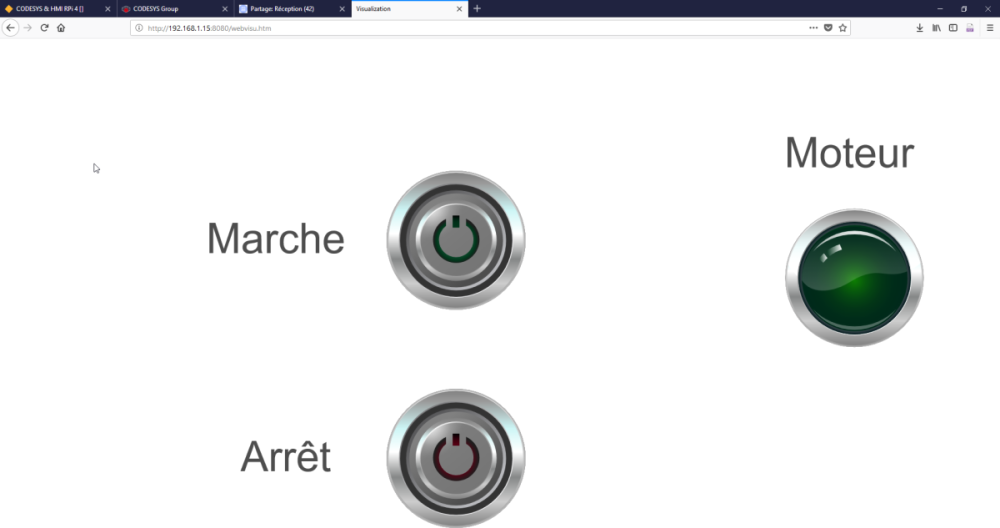
Webvisu
Il est également possible d'accéder à la visualisation depuis un navigateur web (PC avec Firefox, Tablette ou Smartphone avec Chrome)
- On place l'adresse IP du Raspberry Pi dans le navigateur suivi du numéro de port 8080 et l'on charge la page webvisu.htm
- 192.168.1.15:8080/webvisu.htm
- on peut s'amuser à piloter la Led du RPi depuis Firefox
Vidéo de pilotage par Tablette
- Le principe précédent est strictement identique avec une Tablette. Ci-dessous, une vidéo de démonstration de pilotage du Rasberry Pi avec la WebVisu Codesys sur une tablette.
{{< youtube IB3pWCfzkzI >}}
Conclusion
On vient de porter le Runtime Codesys dans un Raspberry Pi pour en faire un automate que l'on peut programmer avec l'environnement CODESYS. Ce premier test est très simple et permet de valider :
- le port du RunTime Codesys sur le Raspberry Pi
- les IHM embarqués dans le Raspberry Pi
- le pilotage par Smartphone de l'IHM
- ...
L'outil Codesys, à l'instar de TIA Portal, est très puissant, avec une complexité proportionnelle à cette puissance. Il n'y a pas de secrets, la maîtrise vient avec le nombre d'heures passées sur l'outil !
Codesys et Master EtherCAT sur Raspberry PI
Introduction
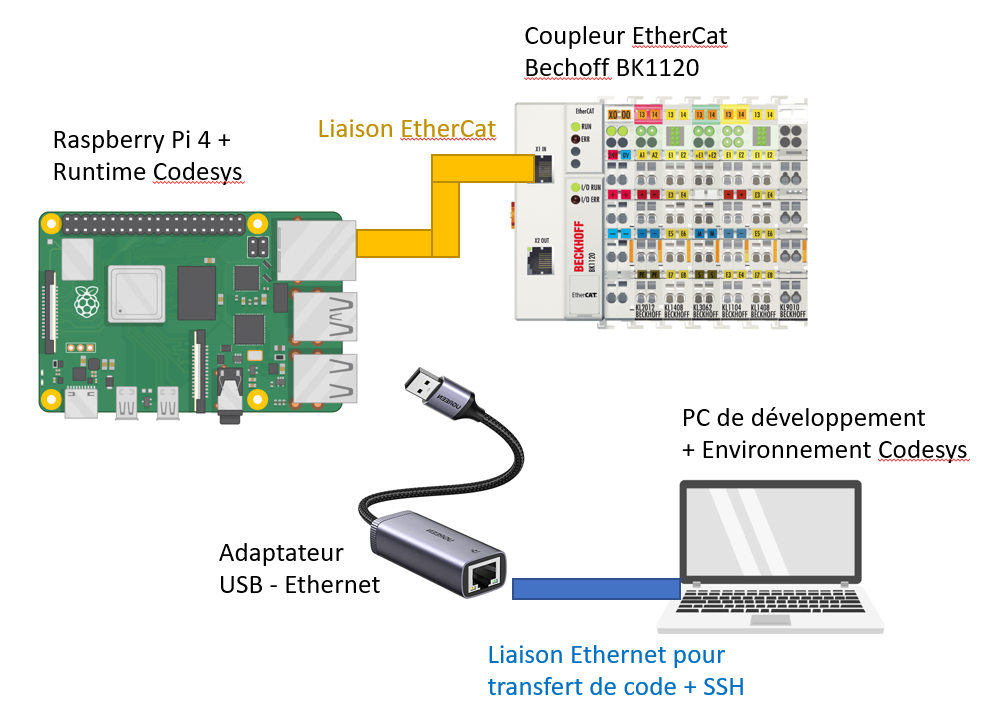
Le Runtime de Codesys permet de générer un Master Ethercat. Dans cet article, nous allons utiliser un Raspberry Pi avec le Runtime CodeSys comme Master EtherCAT et un coupleur EtherCAT BK1120 de Beckhoff commme I/O déporté (Slave).
Branchement
Le branchement du Raspberry Pi sera modifié dans le contexte d’un réseau Ethercat.
- On utilisera le connecteur Ethernet du Rpi pour la liaison Ethercat avec le coupleur Beckhoff.
- Pour connecter le RPi au PC de développement, on ajoutera un second port Ethernet avec un adapteur USB-Ethernet.
Dans ce cas d’une communication Ethercat, il ne faut pas utiliser de switch, un branchement direct entre le Master et le Slave est nécessaire.
Configuration réseau : IP + EtherCAT
Deux configurations réseau seront à effectuer sur le Raspberry Pi:
- affecter une adresse IP pour l’adaptateur USB-Ethernet que nous utiliserons pour les liaisons SSH, VNC et Codesys.
- pour la liaison Ethercat, il est nécessaire de récupérer l’adresse MAC (physique) du port Ethernet physique du RPi. On peut utiliser SSH + la commande
ip apour récupérer cette information.
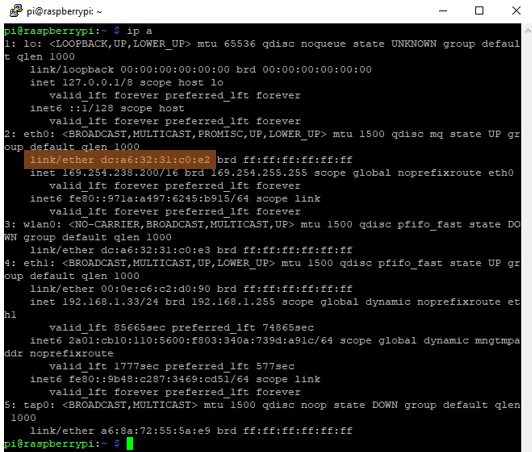
Le port Ethernet physique du RPi est associé à eth0. L’adresse MAC ou physique, aussi nommée ether, est donc DC-A6-32-31-C0-E2. Cette adresse devra être écrite en Majuscule séparée par des tirets dans Codesys.
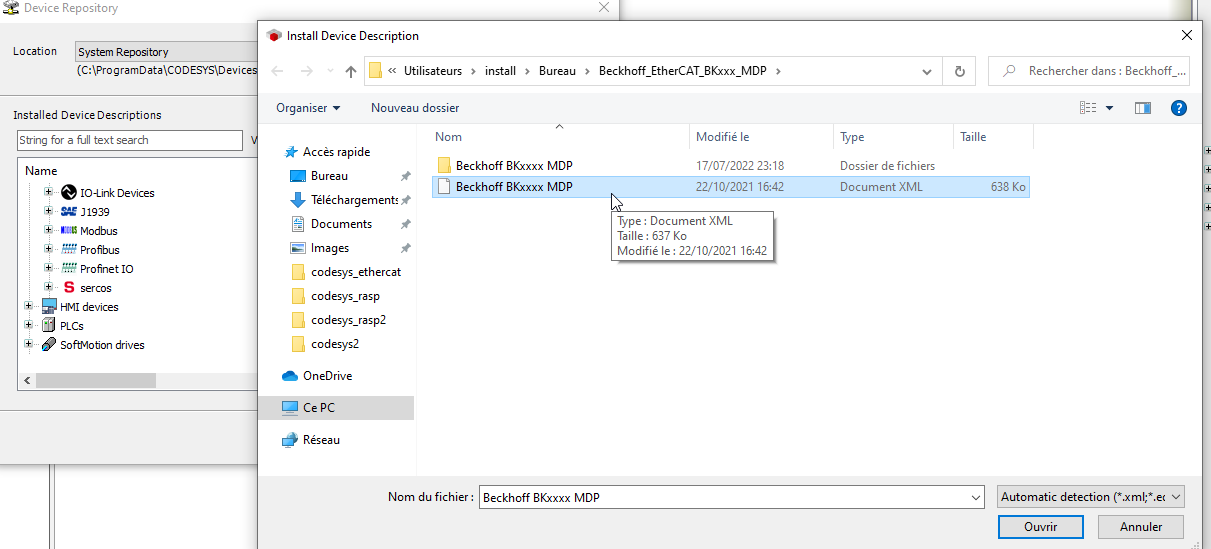
Fichiers de description Beckhoff
Avant de pouvoir connecter le coupleur Beckhoff, nous devons nous assurer de disposer des fichiers XML de description du BK1120 et de ses modules. Par analogie avec l’environnement Siemens, les fichiers XML Beckhoff correspondent aux fichiers GSDML de Siemens.
- Téléchargez et décompressez le fichier Beckhoff_EtherCAT_BKxxx_MDP.zip dans un endroit sûr.
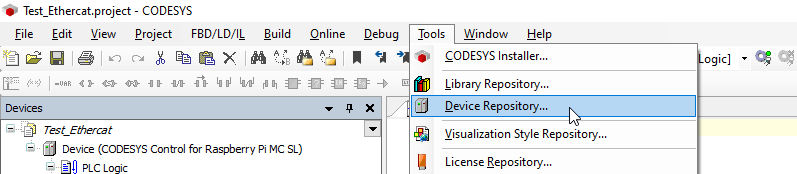
- Ouvrez CODESYS, dans la barre d'outils, sélectionnez Tools -> Device Repository …
- Cliquez sur "Install..."
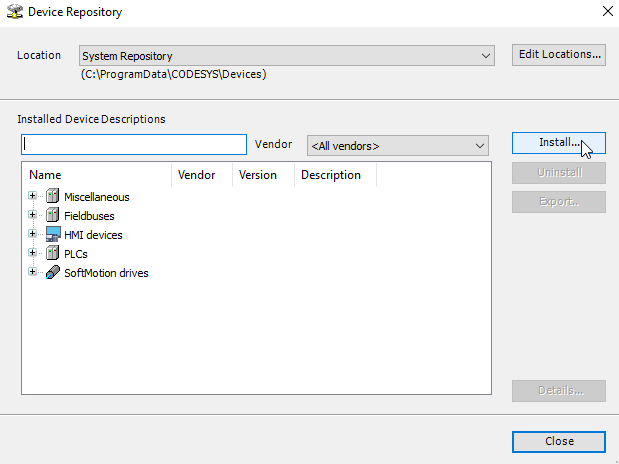
- Accédez au dossier que vous venez de décompresser, sélectionnez le fichier XML "BKxxxx" et cliquez sur Ouvrir, CODESYS installera automatiquement l'appareil.
Configuration du Master EtherCAT
Pour créer la connexion entre le Master EtherCAT sur le Raspberry Pi et le coupleur EtherCAT Beckhoff BK1120 à l'aide de CODESYS :
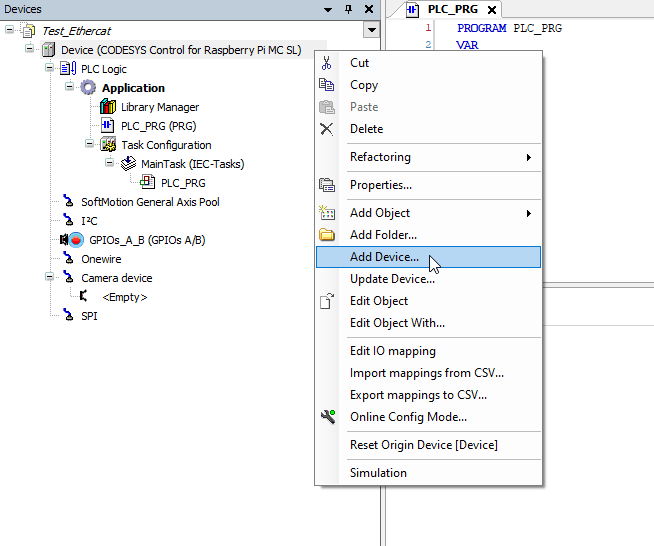
- Démarrez un nouveau projet dans CODESYS et connectez-vous au Raspberry Pi (cf article sur le Runtime CODESYS sur Raspberry Pi)
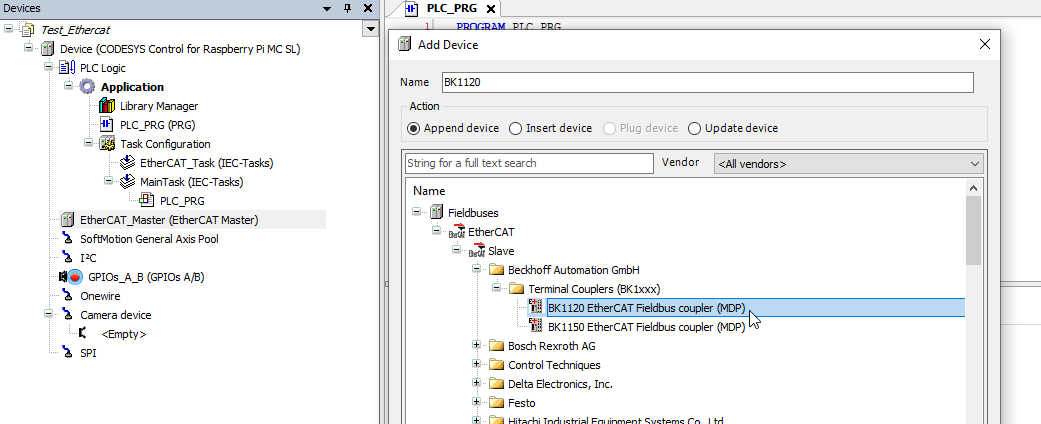
- Faites un clic droit sur "Device" dans votre arborescence d'appareils et sélectionnez "Add Device...".
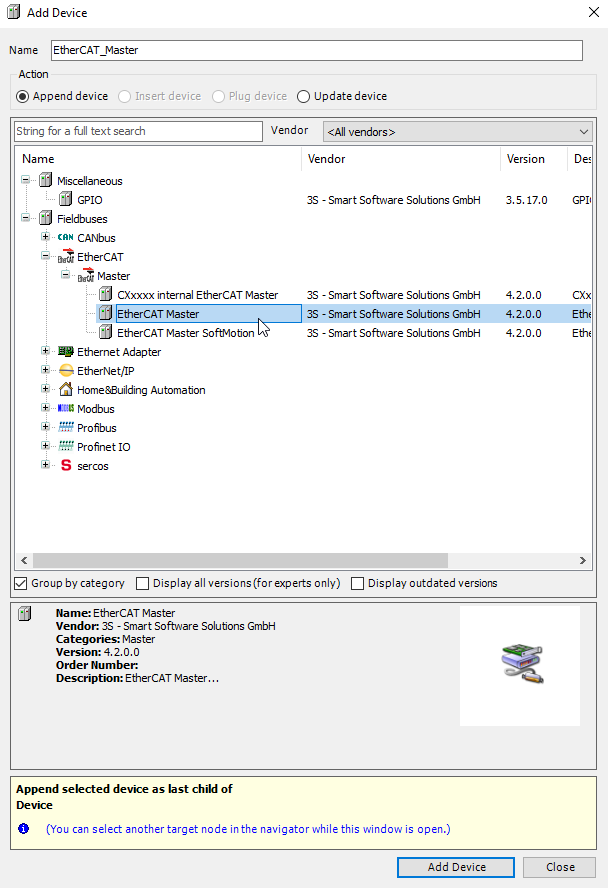
- Sélectionnez "EtherCAT Master" et cliquez sur "Ajouter un appareil".
- Fermez la fenêtre et faites un clic droit sur "EtherCat_Master" dans l'arborescence de vos appareils et sélectionnez "Add Device...".
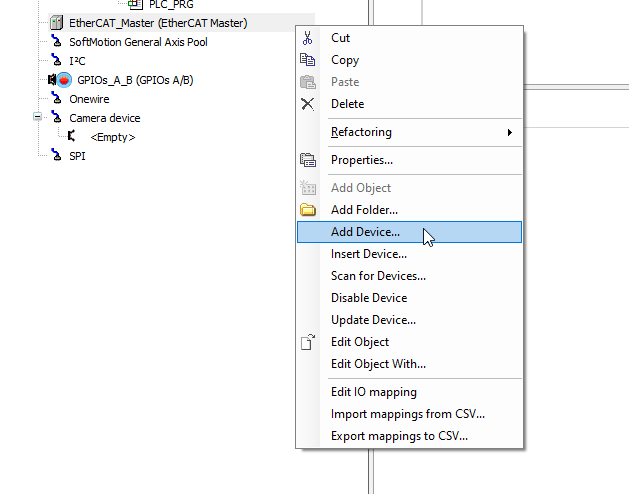
- Sélectionnez "BK1120" dans EtherCat > Slave > Beckhoff Automation System Couplers et cliquez sur "Add Device...".
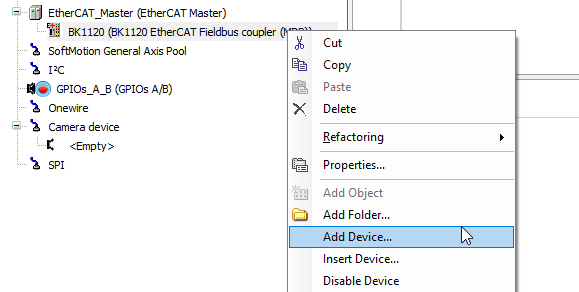
- Fermez la fenêtre et faites un clic droit sur "BK1120" dans l'arborescence de votre appareil et sélectionnez "Ajouter un appareil...".
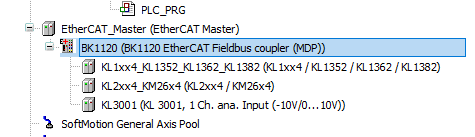
- Sélectionnez le premier de vos modules IO, dans mon cas le "KL1114" depuis EtherCat > Slave > Beckhoff Automation Digital Input Terminals et cliquez sur "Add Device...".
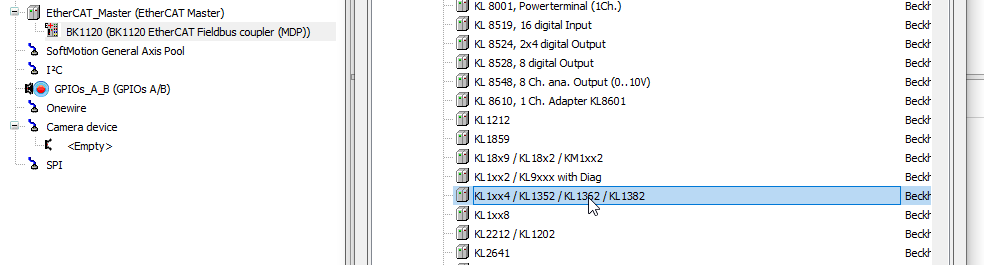
- Répétez l'étape ci-dessus pour toutes les E/S supplémentaires dans l'ordre de connexion au coupleur système.
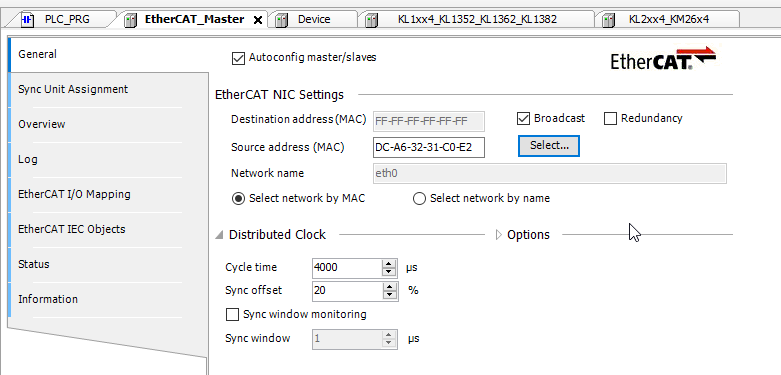
Nous devrons maintenant saisir l'adresse matérielle (MAC) du Raspberry Pi (relevée précemment) dans CODESYS :
- Depuis l'arborescence des appareils, double-cliquez sur "EtherCAT_Master".
- Entrez l'adresse matérielle précédente dans le champ de saisie de texte "Adresse source (MAC)". (L'adresse MAC peut également être détectée directement sur le réseau.) Tout le matériel est maintenant configuré et nous sommes maintenant prêts à créer notre premier programme pour contrôler les E/S industrielles.
Programme MAIN sur le Master
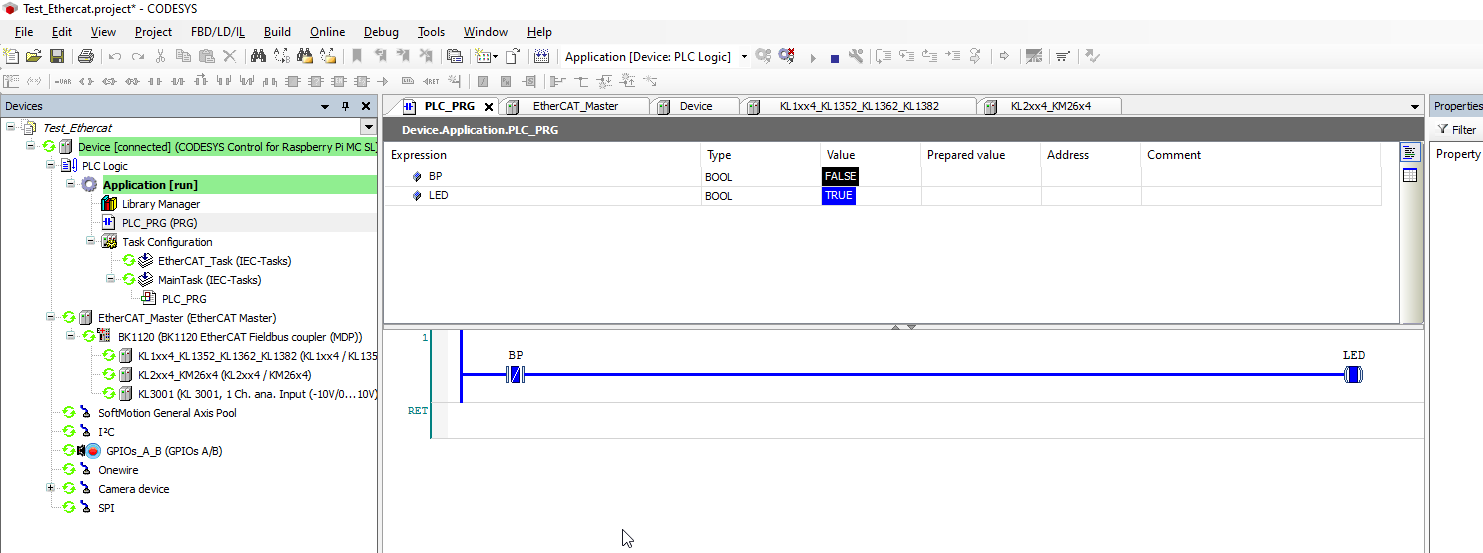
Double-cliquez sur "PLC_PRG (PRG)" dans l'arborescence des équipements. Comme vu dans les articles précédents, nous ferons notre programme en Ladder.
- Dans la partie haute de la fenêtre de programmation, nous déclarons les variables
- Dans la partie basse, il s'agit du programme en Ladder. Dans cet exemple, nous inversons l'état du contact BP pour activer ou non la sortie LED.
Affection des variables
Nous allons maintenant lier les variables du programme MAIN aux entrées sorties du coupleur BK1120.
- Cliquer sur KL1xx4
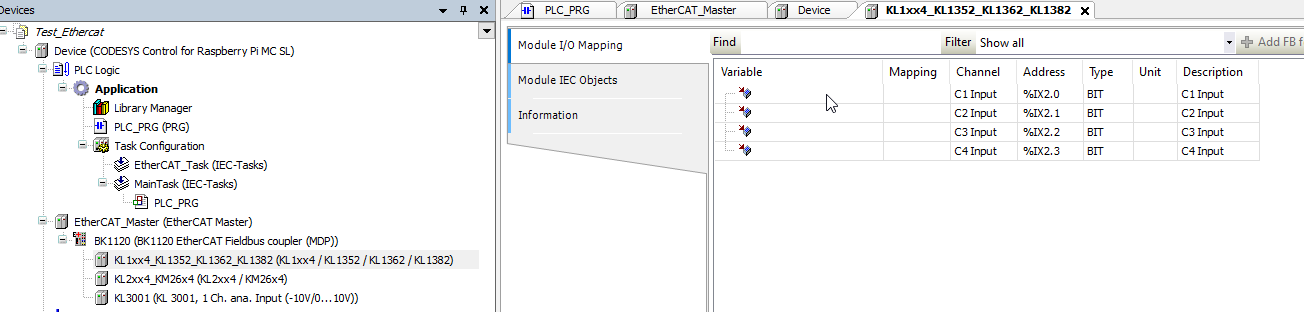
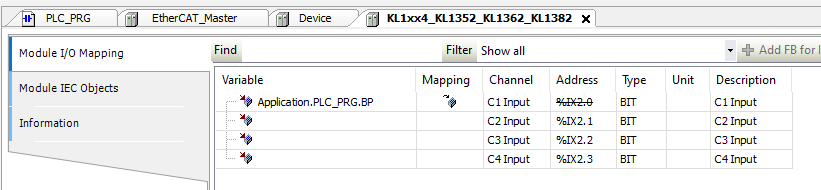
Nous devons maintenant lier notre Variable BP à "C1 Input" du Beckhoff IO
- Allez dans Module IO Mapping
- Cliquez sur les ...
- et cherchez la variable BP sous PLC_PRG
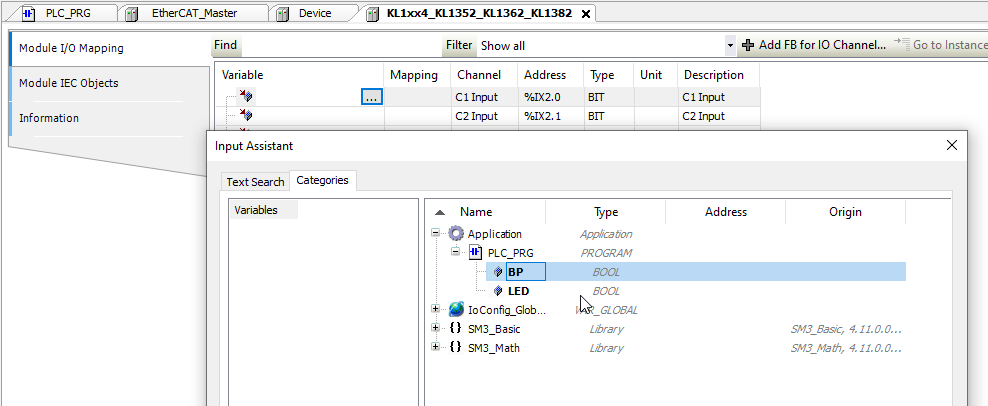
- Vérifiez que l'association soit bien prise en compte
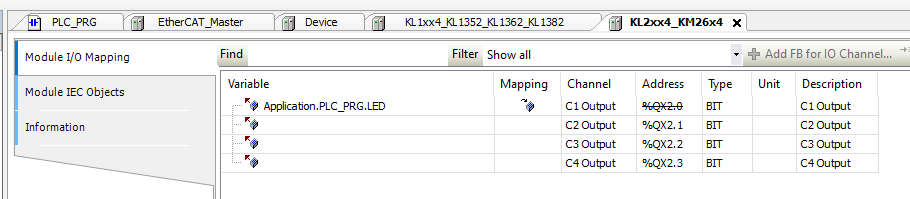
- Nous allons maintenant associer la variable LED à la sortie C1 Ouptut du coupleur Beckhoff.
Test du programme
Pour exécuter le programme :
- Appuyez sur "F11" sur votre clavier, cela construit/compile le code. Également trouvé sous "Construire" dans la barre d'outils.
- Une fois le code compilé, appuyez sur "Alt + F8" sur votre clavier pour vous connecter au Pi (le PLC puisqu'il va assurer ce rôle). Cette commande se retrouve également sous "En ligne" dans la barre d'outils.
- Cliquez sur "Oui" dans la fenêtre contextuelle pour télécharger le programme.
- Une fois le programme téléchargé, appuyez sur "F5" pour lancer le programme, fonctionnalité que l'on retrouve sous "Debug" dans la barre d'outils.
- Vous devriez maintenant voir la LED de sortie 1 sur le terminal Beckhoff s'allumer ou s'éteindre en fonction de l'appui sur le l'interrupteur BP.
- Pour arrêter le code appuyez sur " Maj + F8" sur votre clavier, fonctionnalité que l'on retrouve également sous "Debug" dans la barre d'outils.
Conclusion
Nous pouvons maintenant contrôler des coupleurs d'E/S industriels à l'aide d'un Raspberry Pi en tant que Master EtherCAT. Néanmoins, il est illusoire de penser qu'il est possible d'atteindre les perfomances temps réel avec le Runtime Codesys comme sur un IPC Beckhoff qui est prévu pour. Pour des applications classiques d'automatisme sans besoin de synchroniser des axes moteurs, les performances offertes par ce type de dispositif sont équivalents à celles offertes par une communication Profinet I/O.
Master IO-Link sur Raspberry Pi
Master IO-Link Raspberry Pi
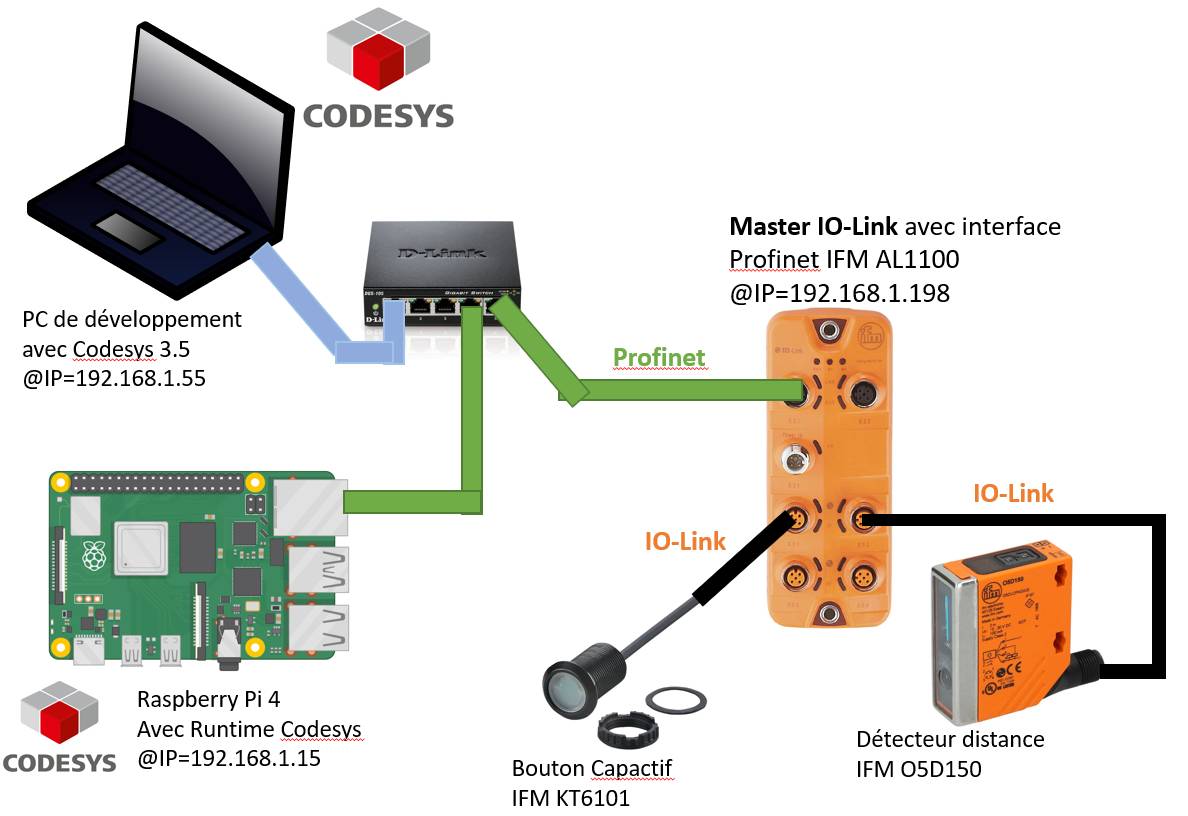
Cet article fait suite à la communication entre TwinCAT 3 et un Master IO-Link Profinet. Il est également possible de connecter un Master IO-Link Profinet sur un Raspberry Pi 4 avec le Runtime Codesys. Le schéma du montage utilisé est représenté ci-dessous :
-
Le Raspberry Pi va constituer notre PLC. Le Runtime Codesys est installé dessus. Il va gérer la communication Profinet avec le Master IO-Link Profinet AL1100 d'IFM.
- @IP du Raspberry Pi est
192.168.1.15
- @IP du Raspberry Pi est
-
Le Master IO-Link Profinet AL1100 d'IFM va être associé à deux capteurs IO-Link
- Détecteur de distance O5D150
- Bouton capacitif KT6101
- @IP du Master IO-Link est
192.168.1.198
-
Le PC de développement va permettre de générer le code PLC et le transférer sur le Raspberry Pi. Contrairement à TwinCAT où le Runtime est exécuté sur le PC, dans cette application, le Runtime est sur le Raspberry Pi.
- @IP du PC de dev :
192.168.1.55
- @IP du PC de dev :
Prérequis :
- Codesys 3.5 installé (et fonctionel) sur un PC de développement -> cf article
- Runtime Codesys installé sur un Raspberry Pi -> cf article
Il est également nécessaire d'avoir lu l'article sur la communication entre le Master IO-Link Profinet et TwinCAT car plusieurs aspects vont se retrouver ici :
- les fonctions en langage ST pour le décodage des capteurs
- l'association des variables
Projet Codesys
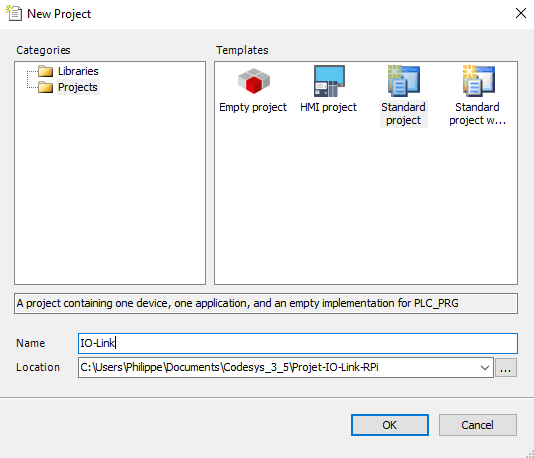
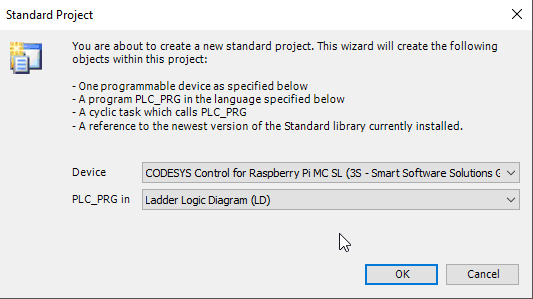
- Créer un Standard New Project
- Choisir pour le Device Codesys Control for Raspberry PI MC SL
- Choisir Ladder Logic pour PLC_PRG
Gateway et Raspberry Pi
En double cliquant sur Device, dans les Communications Settings:
- Gateway -> Add New Gateway
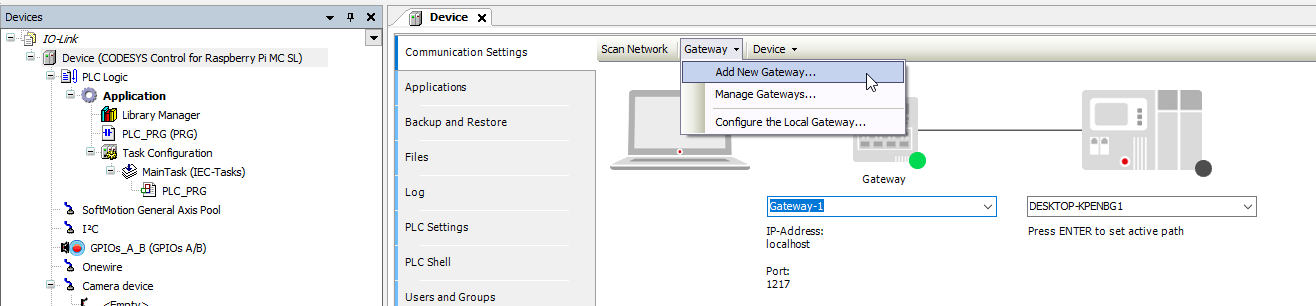
- Placer l'adresse IP du PC développement (@IP=192.168.1.55 dans mon cas)

À droite de la Gateway,
- placer l'adresse IP du Raspberry Pi
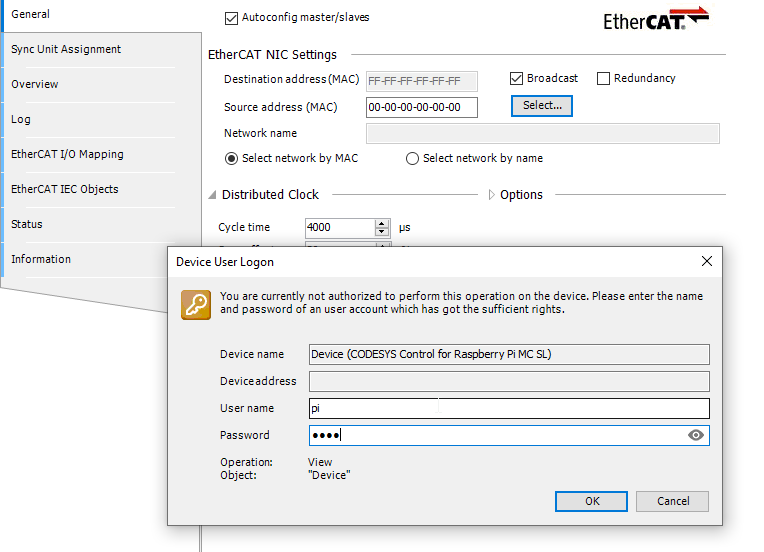
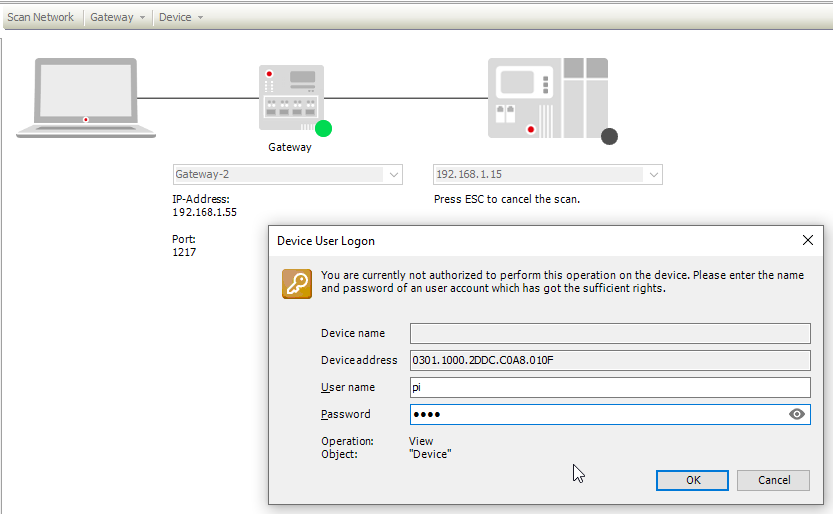
- en appuyant sur Entrée, un fenêtre de Device User Logon apparaît :
- mettre le User Name du Raspberry pi -> pi
- mettre le Password -> 3.14 dans mon cas
La liaison avec le Raspberry Pi doit passer au vert et indiquer (active)
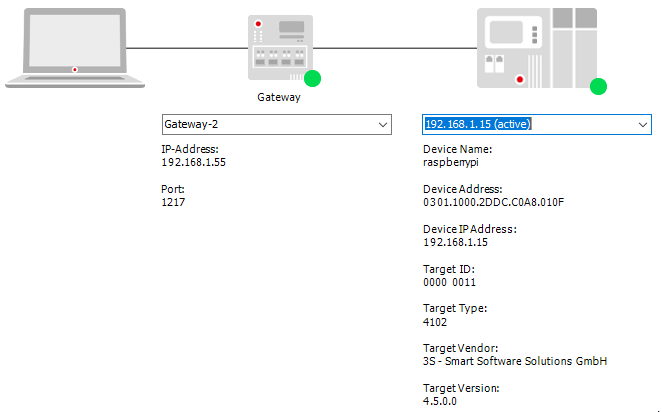
Si tout est au vert, on peut passer à la liaison Profinet
Configuration de la liaison Profinet
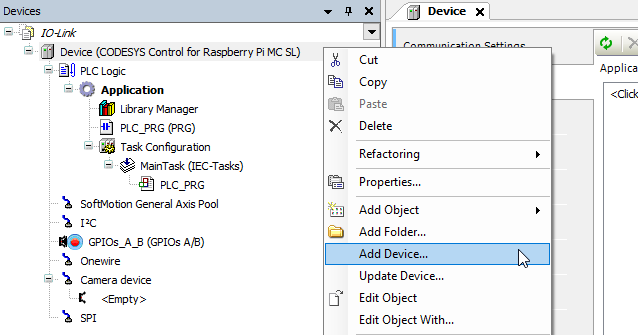
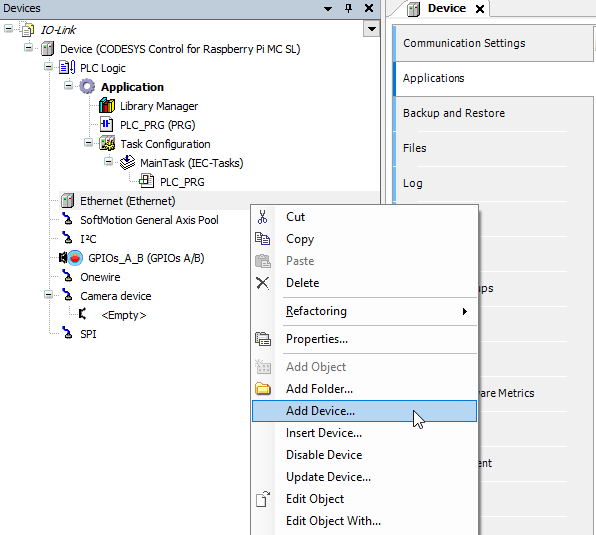
Faire un clic droit sur Device :
- Add Device
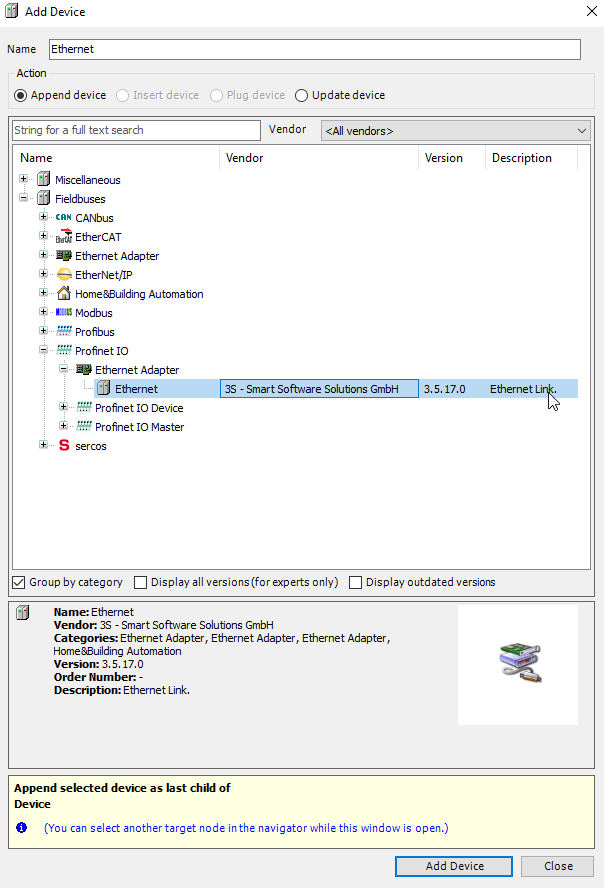
Dans l'arborescence Profinet IO :
- Choisir Ethernet
- et faire Add Device
Sur Ethernet(Ethernet), faire un clic droit :
- Add Device
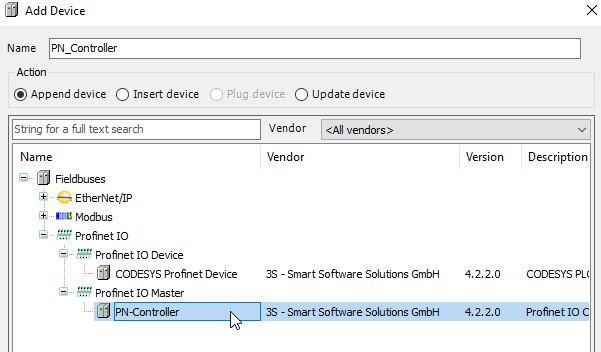
Dans l'arborescence Profinet IO Master :
- Choisir PN-Controller
GSDML du Master IO-Link Profinet d'IFM
Comme pour TIA Portal, le Master IO-Link Profinet n'est pas installée de base dans Codesys. Il est nécessaire d'ajouter le fichier GSDML correspondant dans le Device Repertory.
Dans l'onglet Tools, faire :
- Device Repertory
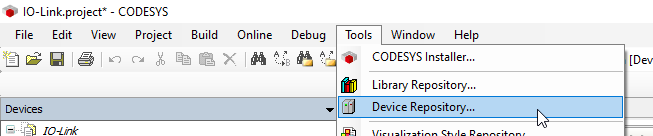
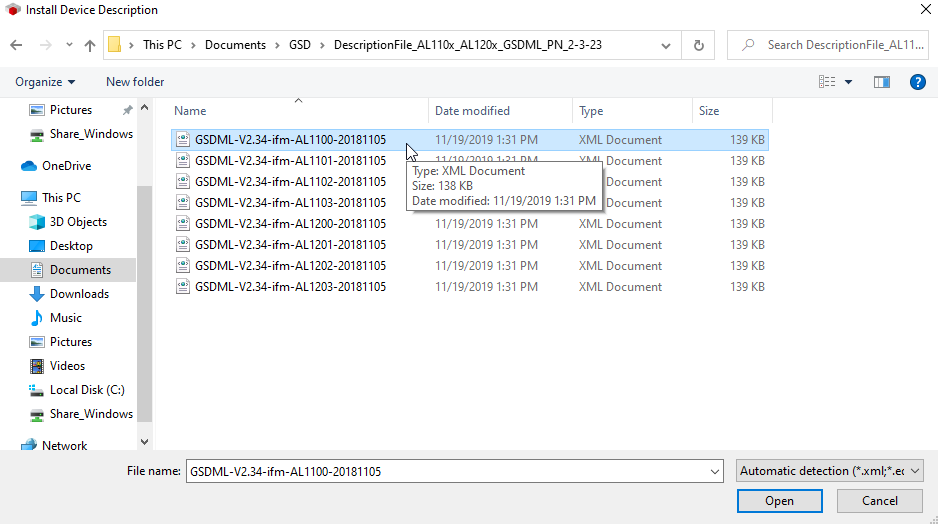
Cliquer sur Install
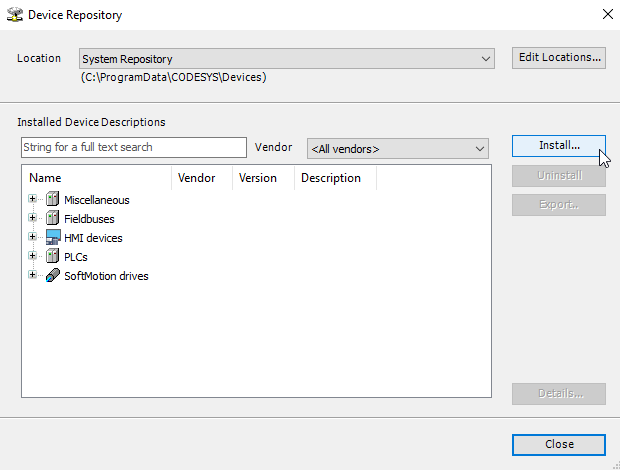
et sélectionner le GSDM correspondant à votre Master IO-Link. Pour rappel, le fichier GSDML du Master IO-Link Profinet AL1100 se télécharge directement chez IFM.
- après avoir sélectionné le fichier, faire open.
Ajout du Master IO-Link
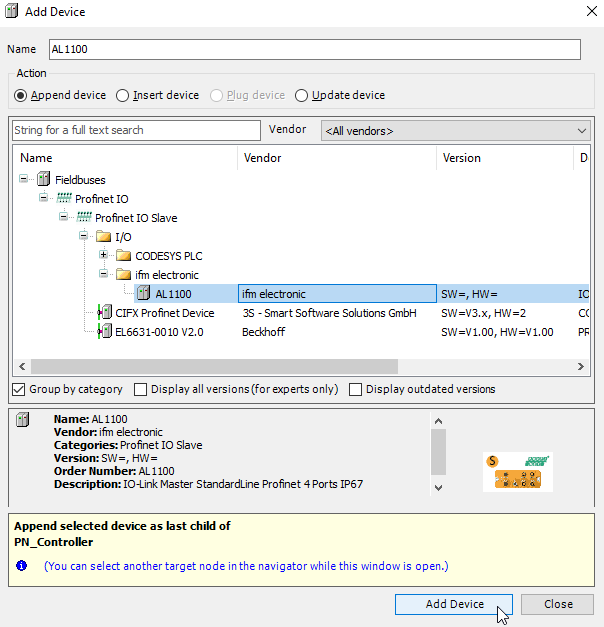
En cliquant sur PN_Controller (PN-Controller), faire
- Add Device
Dans l'arborescence Profinet IO -> IO -> ifm electronic, choisir
- AL1100, ifm electronic
- faire Add Device
Configuration Profinet et IO-Link
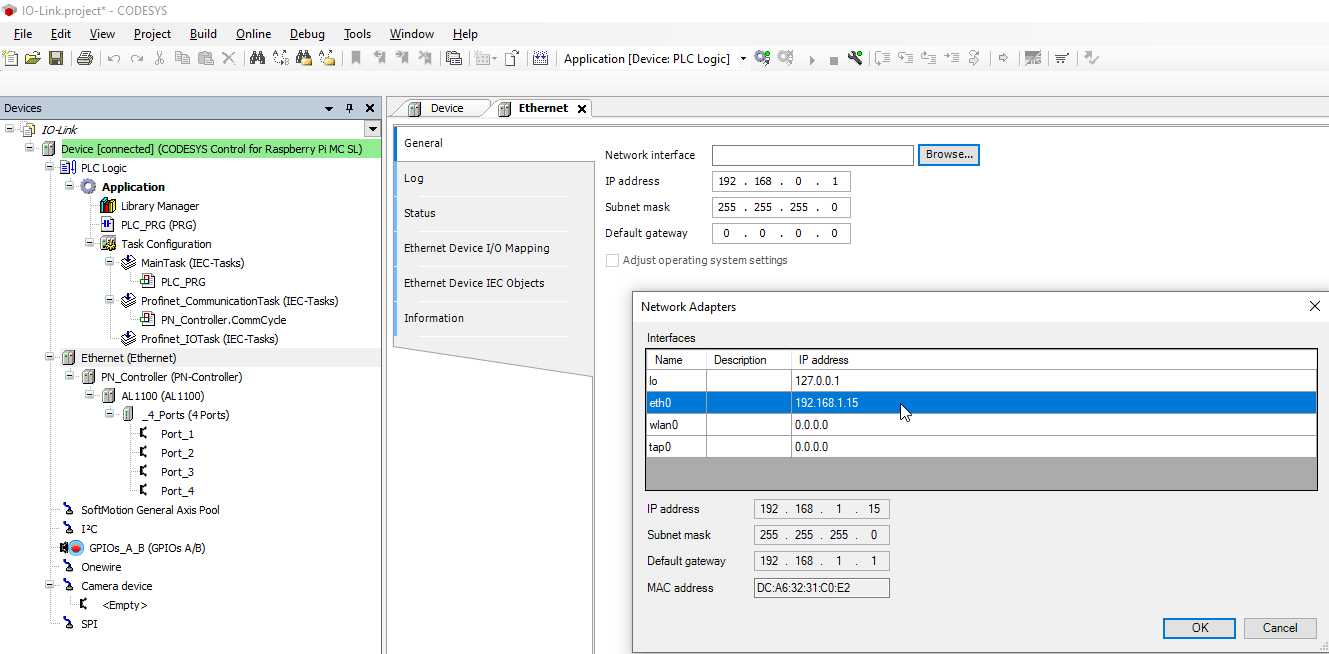
Double cliquer sur Ethernet (Ethernet)
- Dans Network interface, faire Browse
- une fenêtre Network Adapters apparait
- choisir l'interface
eth0qui correspond à l'interface ethernet du Raspberry Pi
- choisir l'interface
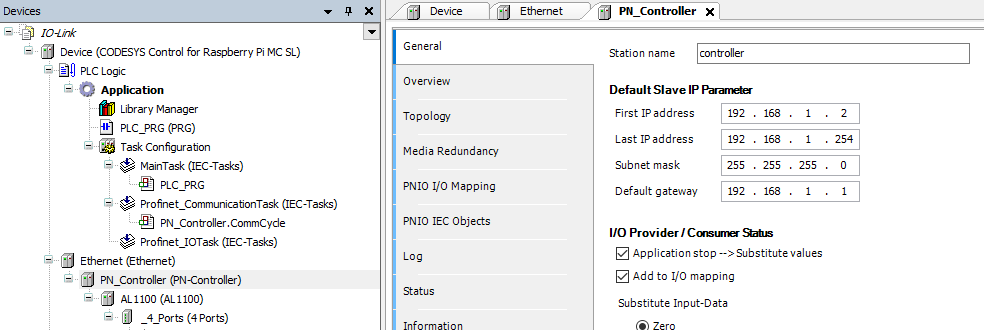
Double cliquer sur PN_Controller et modifier la plage d'adresses pour les Slave
- First IP Address :
192.168.1.2 - Last IP Address :
192.168.1.254 - Subnet Mask :
255.255.255.0 - Default Gateway :
192.168.1.1
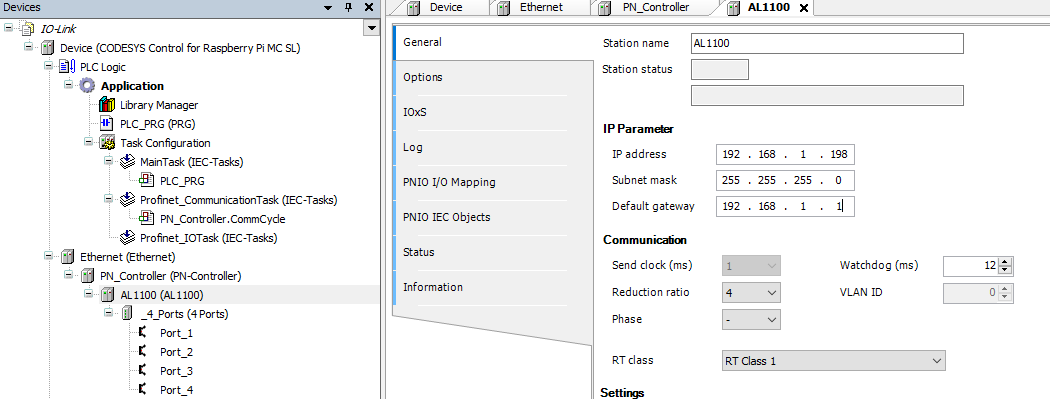
Double cliquer sur AL1100 (AL1100) et modifier les IP Parameter
- IP Address :
192.168.1.198 - Subnet Mask :
255.255.255.0 - Default Gateway :
192.168.1.1
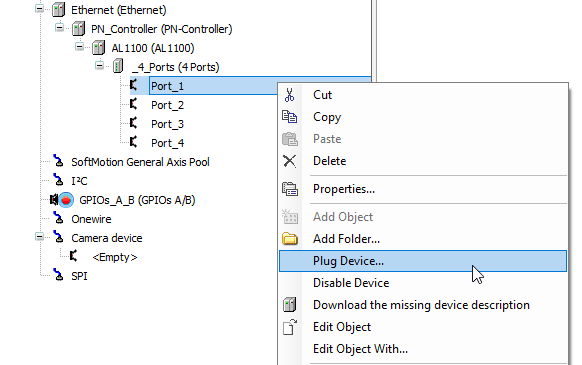
Dans _4 _Ports (4 Ports) , sur le Port_1, faire
- Plug Device
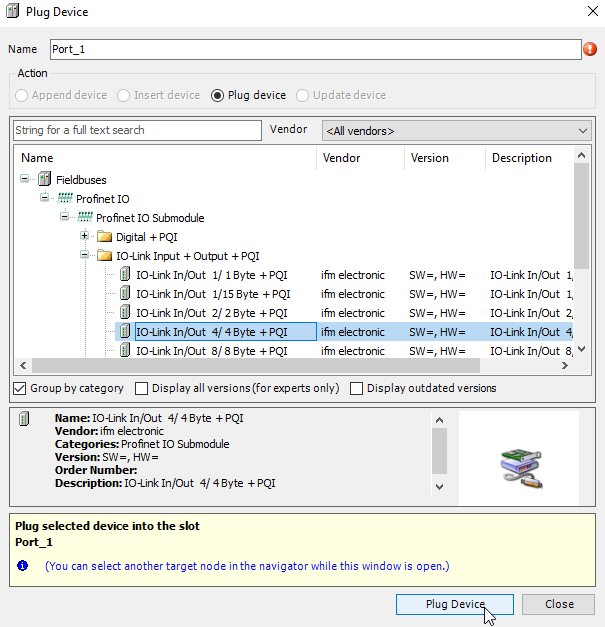
Comme nous avons branché le bouton capacitif KT6101 sur le port 1, il faut lui associer la taille de IO-Link Inpurt + Output adapté au message. Dans notre cas, choisir :
- IO-Link In/Out 4/4 Byte + PQI
- et faire Plug Device
Avant d'aller plus loin, nous allons tout de suite configurer le rafraichissement automatique des données :
En double cliquant sur Port 1, en bas à droite, dans le champs Always Update Variables :
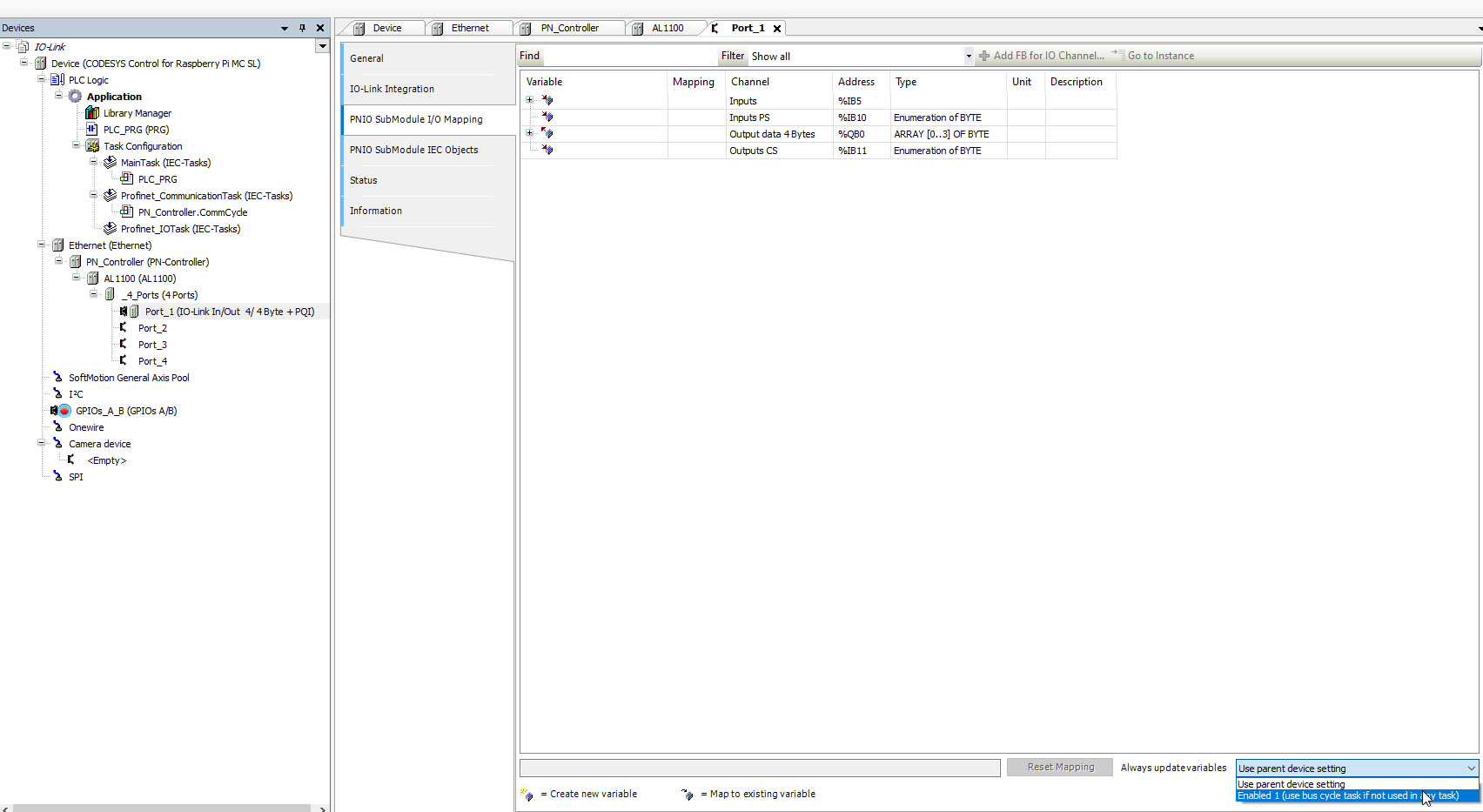
Faire :
- Enabled 1 (uses bus cycle task if not used in any task)

Vérifier que cela soit bien pris en compte sinon les valeurs des capteurs n'apparaîtrons pas !

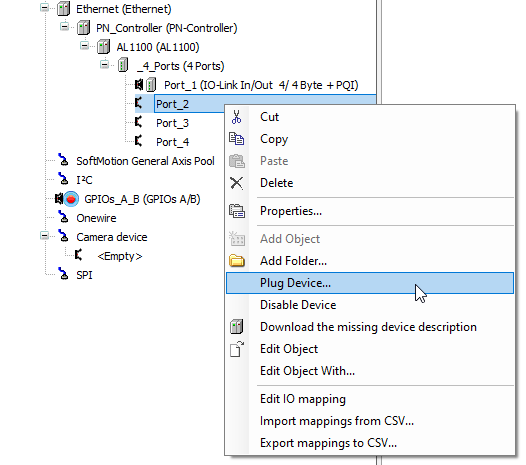
On va procéder de manière analogue pour Port_2 :
- on clic sur Plug Device
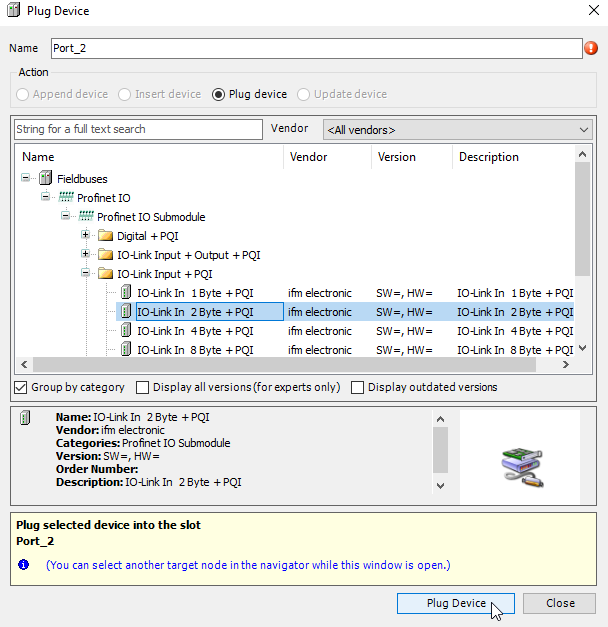
Il s'agit du détecteur de distance O5D150 qui est branché sur Port_2, celui ci nécessite 2 Bytes d'Input pour le message :
- IO-Link 2 Bytes + PQI
- et Plug Device
Pareil que précédement, on fait attention à autoriser Always update variables avec l'option :
- Enabled 1 (use bus cycle task if not used in any task)

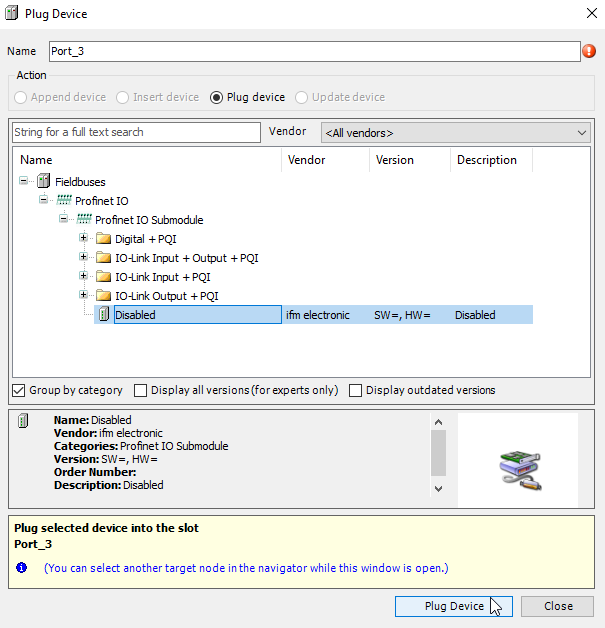
Pour les Port_3 et Port_4, comme aucun capteur n'est branché dessus, nous placerons Disabled
Test rapide du fonctionnement du Master IO-Link
Sans oublier de faire Save, cliquer sur
- Generate Code (F11)

Pour se connecter sur le Raspberry Pi et y transférer le code Automate, cliquer sur la petite prise de courant (Login)
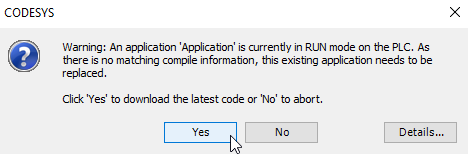
- Codesys peut indiquer ce message en indiquant qu'une application est déjà en Run sur le Raspberry Pi, confirmer avec Yes le tranfert.
On clique sur :
- Start (F5)
Normalement, tous les éléments passent au vert.
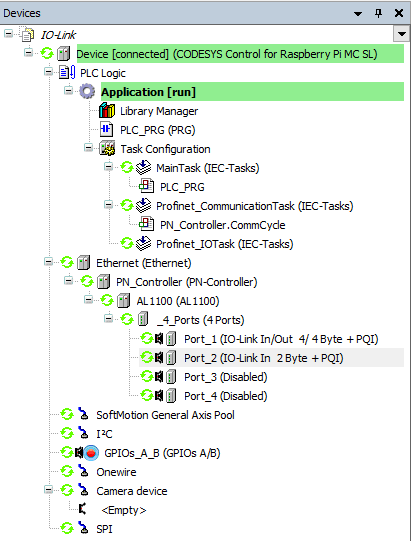
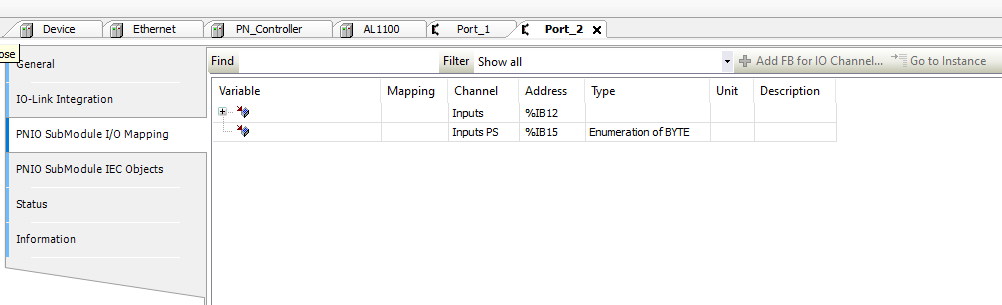
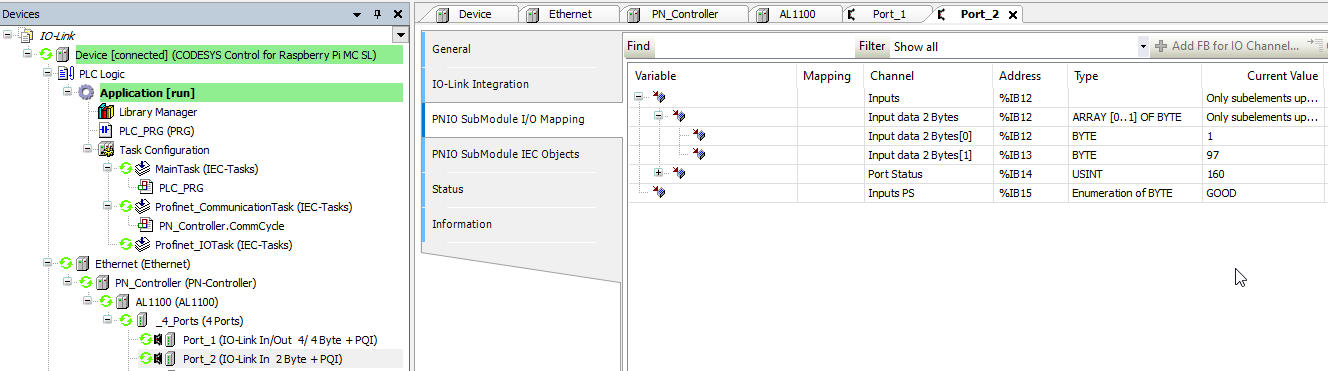
En cliquant sur le Port_2, dans
- PN/IO SubModule I/O Mapping, en développant l'arborescence, on peut voir les données de distance dans :
- Input datat 2 Bytes[0] %IB12
- Input datat 2 Bytes[0] %IB13
Ces données varient avec la distance mesurée. Comme pour TwinCAT, il faudra mapper ces données aux variables du programme Automate.
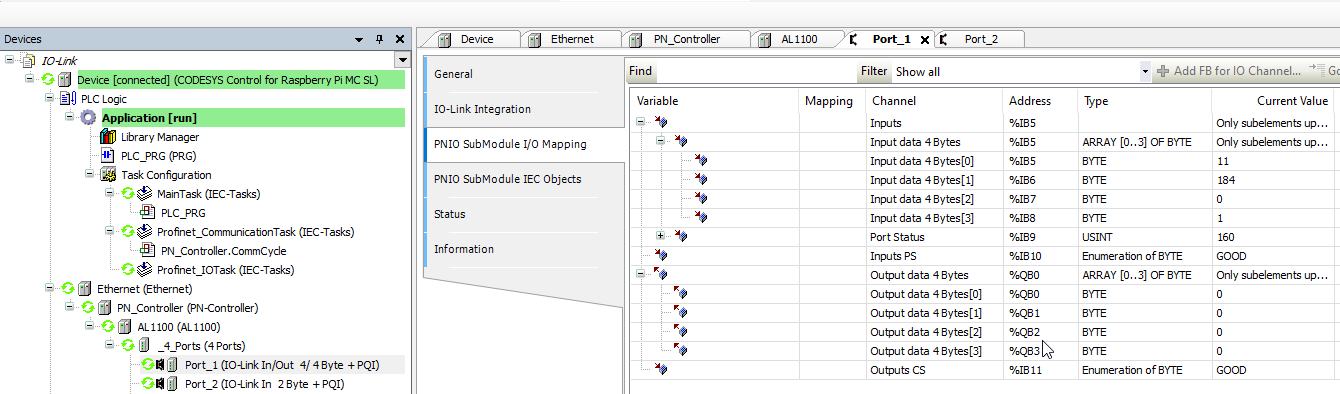
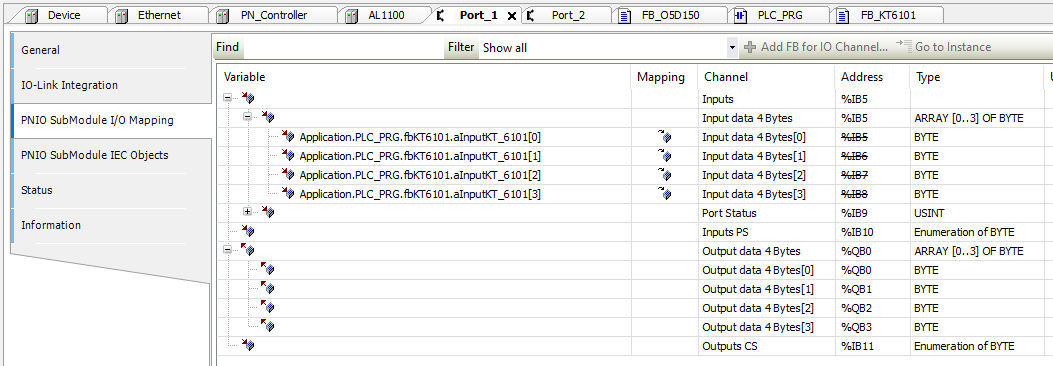
En cliquant sur le Port_1, dans
- PN/IO SubModule I/O Mapping, en développant l'arborescence, on peut voir les données de distance dans :
- Input datat 4 Bytes[0] %IB5
- Input datat 4 Bytes[1] %IB6
- ... Ces données varient avec l'appui sur le bouton capacitfif. Pareillement, nous devrons mapper ces variables capteur au programme automate.
Pour se déconnecter, on clique sur Stop pour Logout.
Bilan
Cette première étape nous a permis de valider la bonne communication avec le Master IO-Link. Les prochaines étapes seront:
- création des fonctions de décodage pour les capteurs
- mapping des variables automate avec les variables IO-Link
- création d'une IHM permettant d'afficher ces résultats
- test de l'IHM sur une tablette
Programme Automate et fonctions capteurs
Les différentes étapes présentées ci-dessous seront très similaires à celles présentées pour l'association d'un Master IO-Link à TwinCAT.
Fonction capteur O5D150
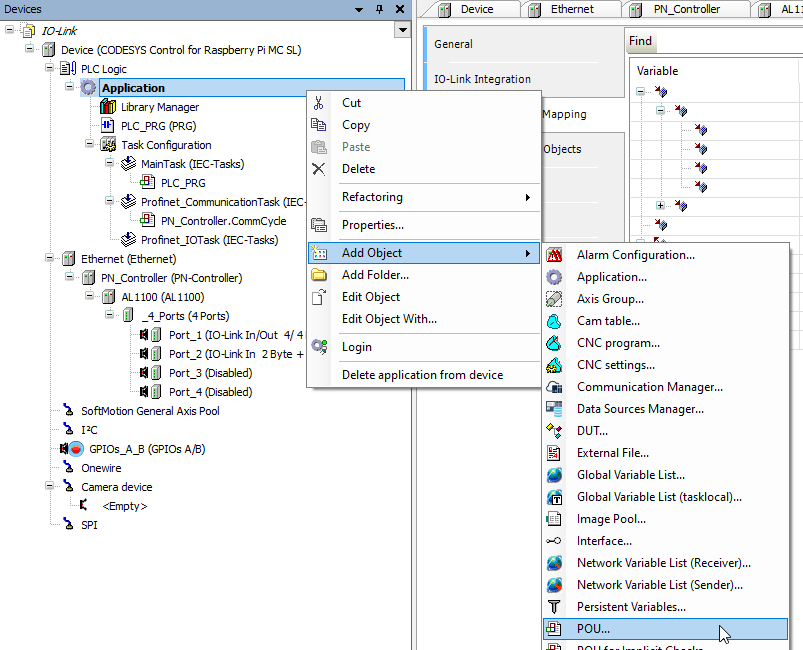
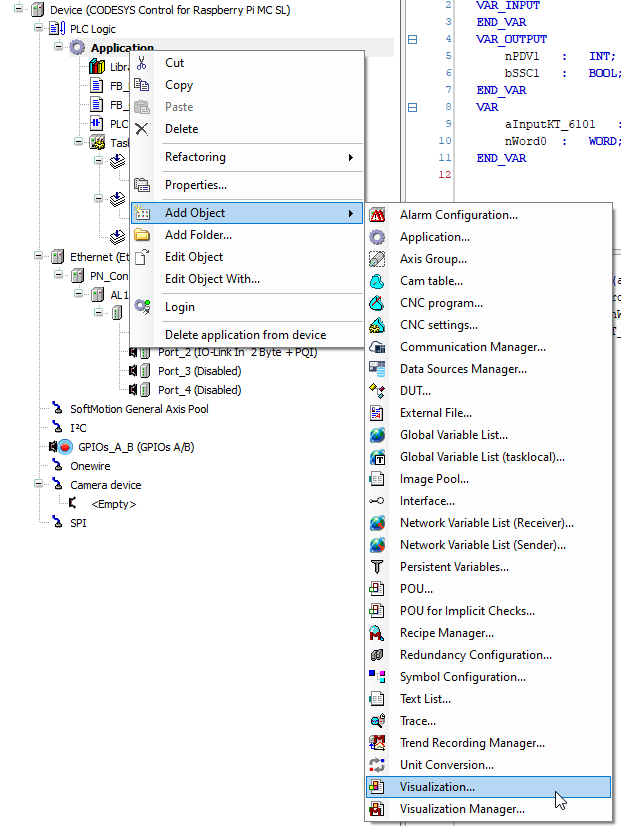
Dans Application faire :
- Add Object -> POU...
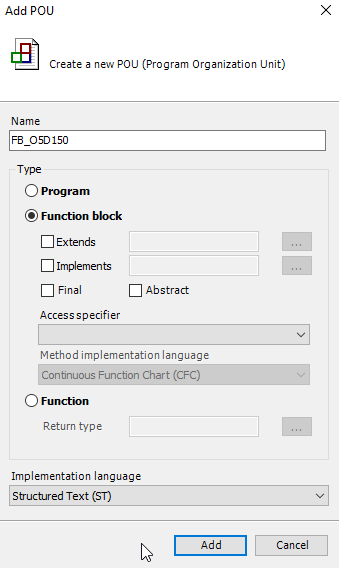
Dans Add POU :
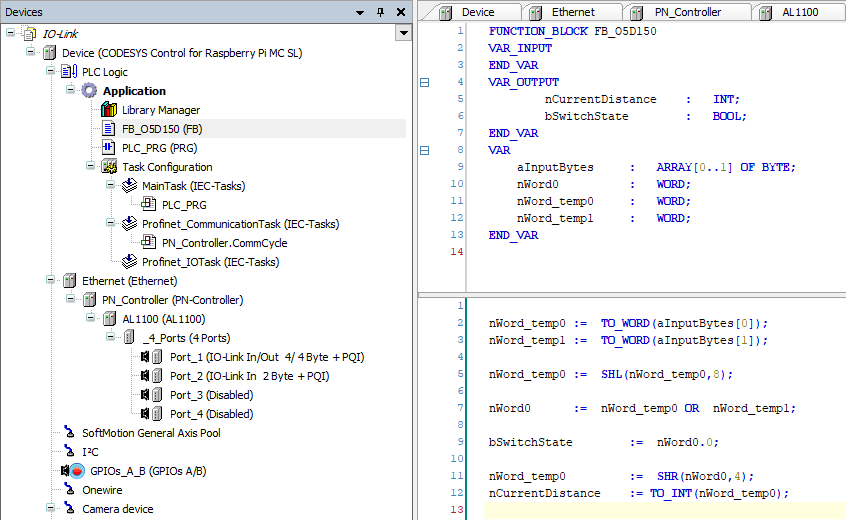
- Name : FB_O5D150
- Type : Function block
- Implemention Language : ST
Le programme de la fonction FB_O5D150 est identique à celui présenté dans TwinCAT :
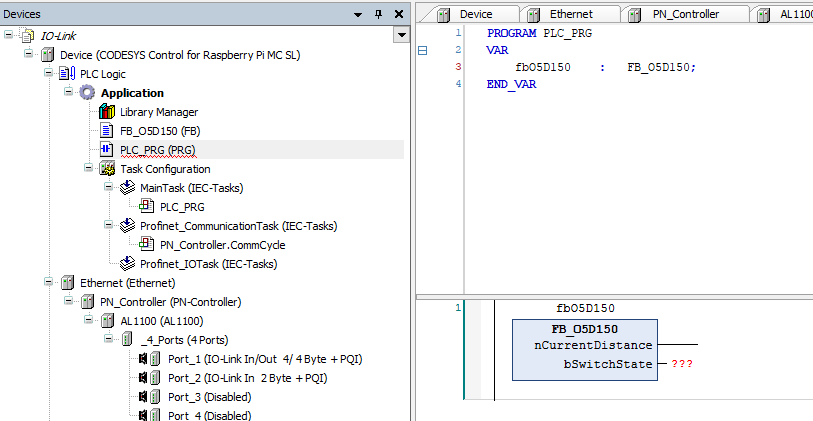
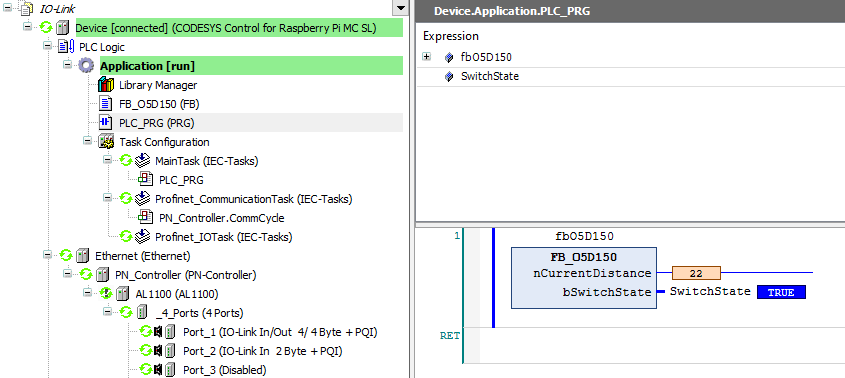
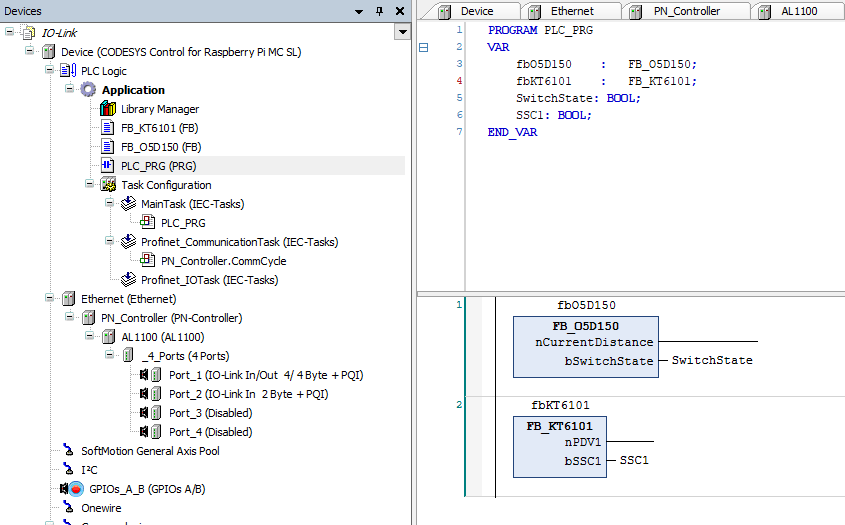
De même pour l'instanciation et l'appel de fonction, seule variante, le PLC_PRG est dans notre cas écrit en Ladder, ce qui signifie qu'il est nécessaire d'ajouter un bloc à nommer fbO5D150 pour réaliser l'appel de fonction.
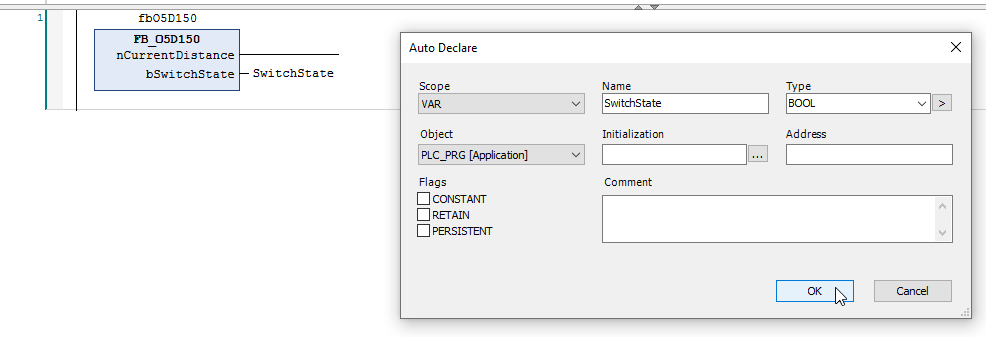
On peut ajouter une variable SwitchState de type dans le PLC_PRG simplement en écrivant SwitchState en sortie du bloc.
Nous allons mapper les variables de la fonction O5D150 aux variables IO-Link :
- dans Port_2 -> PN I/O SubModule Mapping
- cliquer à côté de la petite boîte bleue dans variable au niveau de la ligne %IB12 BYTE
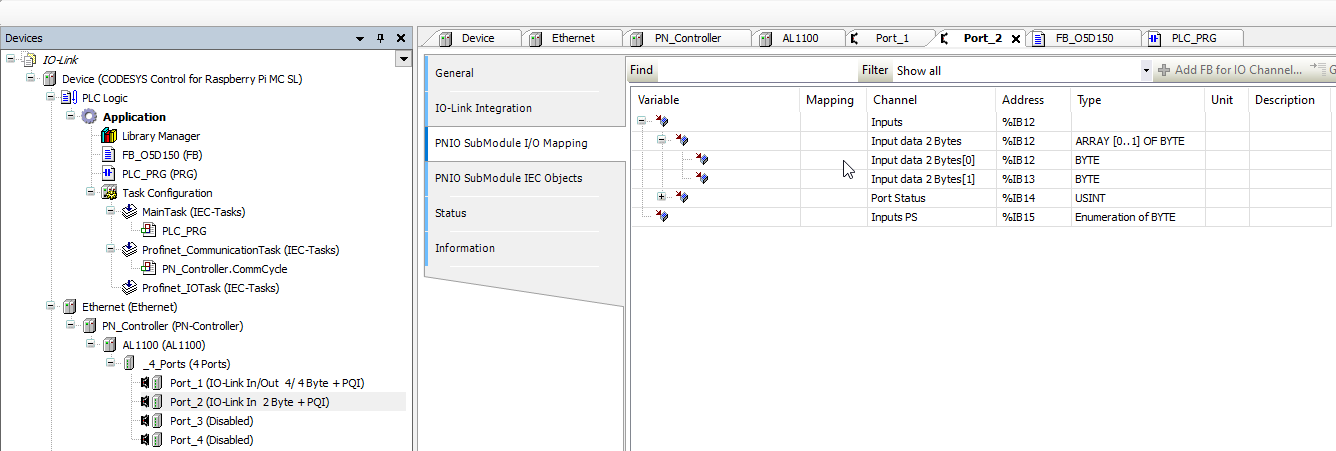
Trois petits points doivent apparaîtrent et lancer l'Input Assistant:
- choisir dan PLC_PRG -> fbO5D150 -> aInputBytes
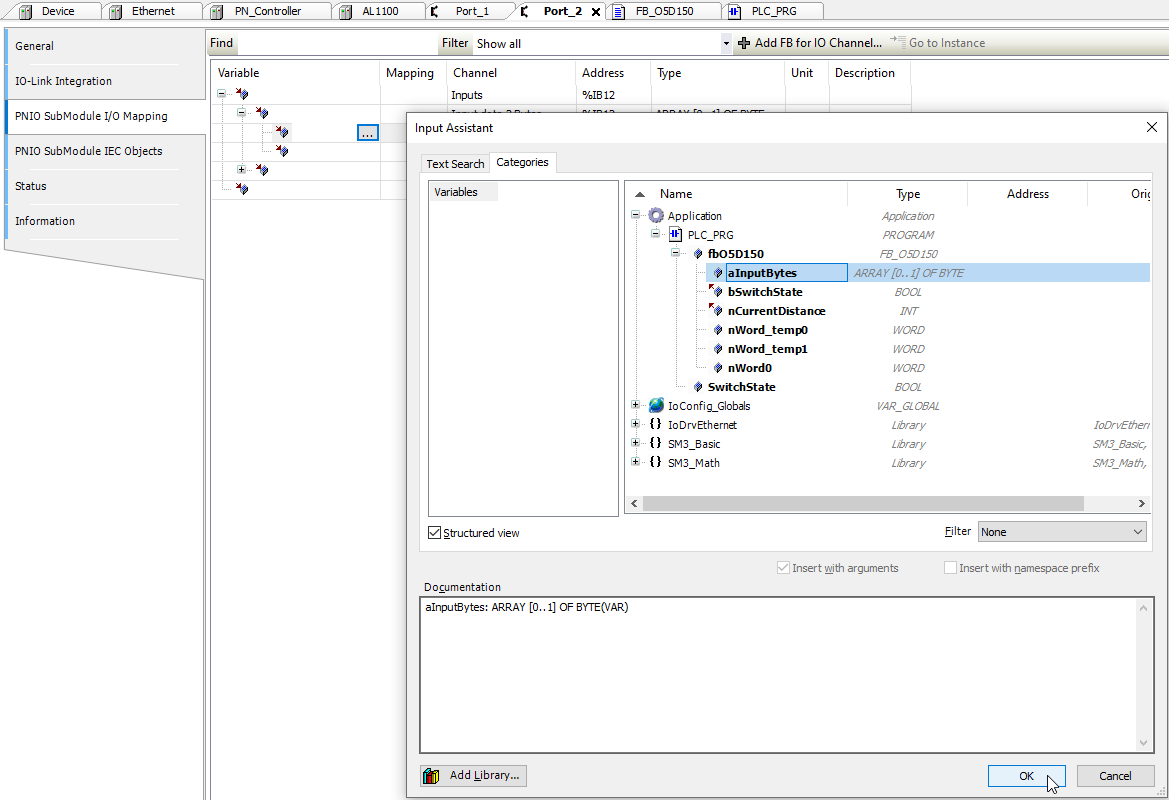
Placer à la fin de la variable [0] pour indiquer qu'il s'agit de l'élément 0 de l'array of Byte.
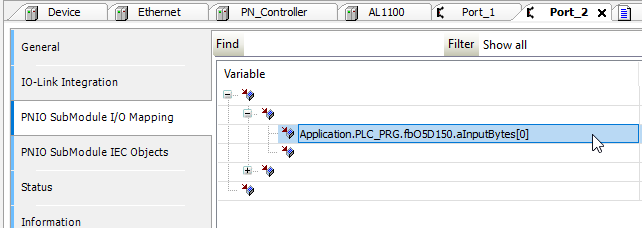
On fait de même pour la ligne %IB13. Noubliez pas de placer à la fin de la variable [1] pour indiquer qu'il s'agit de l'élément 1 de l'array of Byte.

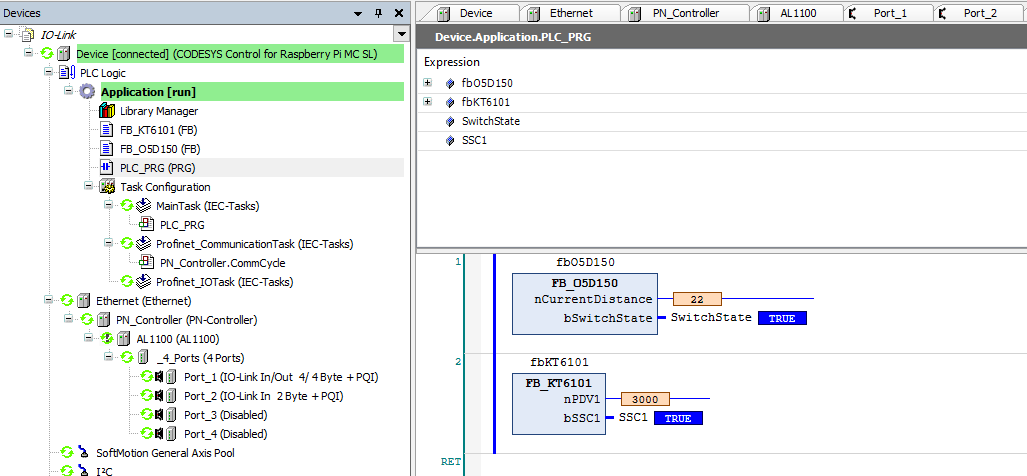
On effectue un Save, suivi d'un Generate, Login et Start
- et normalement le PLC_PRG indique la valeur de distance mesurée par le capteur O5D150.
On n'oublie pas de faire Stop et Logout pour faire des modification du programme.
Fonction bouton capacitif KT6101
Comme pour le capteur O5D150, le code pour le bouton capacitif KT6101 est identique à celui développé pour TwinCAT.
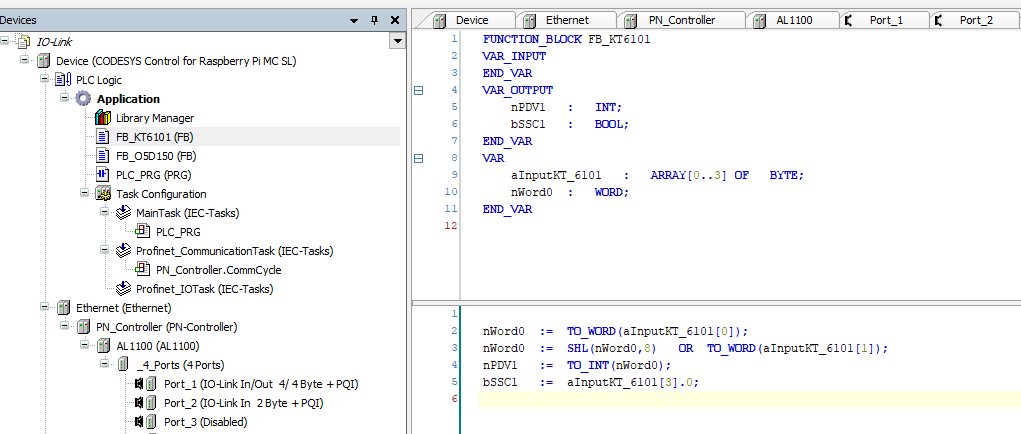
On réalise l'instanciation et l'appel de la fonction fbKT6101 dans PLC_PRG
Pour le mapping des variables IO-Link, on procède de la même manière que le capteur O5D150
On fait Generate, Login et Start :
- Le capteur de distance est toujours fonctionnel
- Le bouton capacitif réagit en fonction de l'appui
Pour finaliser cette démonstration, nous allons intégrer une IHM et réaliser une WebVisu sur tablette.
Visualisation IHM et WebVisu
Pour intégrer une visualisation :
- Clic droit sur Application -> Add Object -> Visualization...
- Dans la fenêtre Add Visualization, laisser le Name : Visualization et faire Add
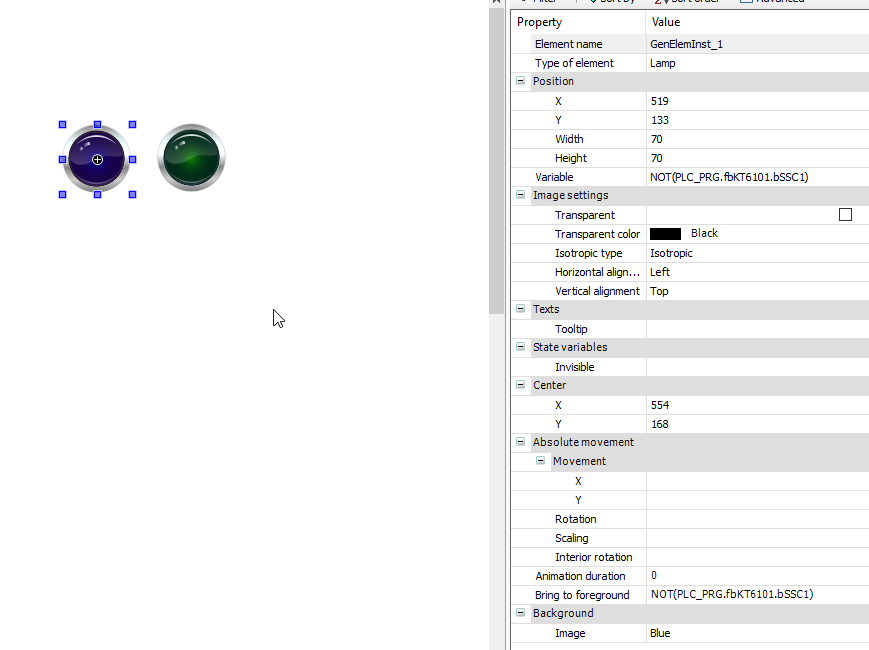
Pour simuler les deux couleurs lumineuses Bleue et Verte, j'utilise une astuce sur la visualisation :
- Je crée un voyant Bleu que j'associe à la variable PLC_PRG.fbKT6101.bSSC1 que j'inverse avec NOT().
- ce voyant passera au premier place avec la même variable dans Bring to foreground
- -> uand le voyant bleu est allumé, il passe au premier plan
Pour le voyant vert, je procède de la même manière sans inverser la variable PLC_PRG.fbKT6101.bSSC1
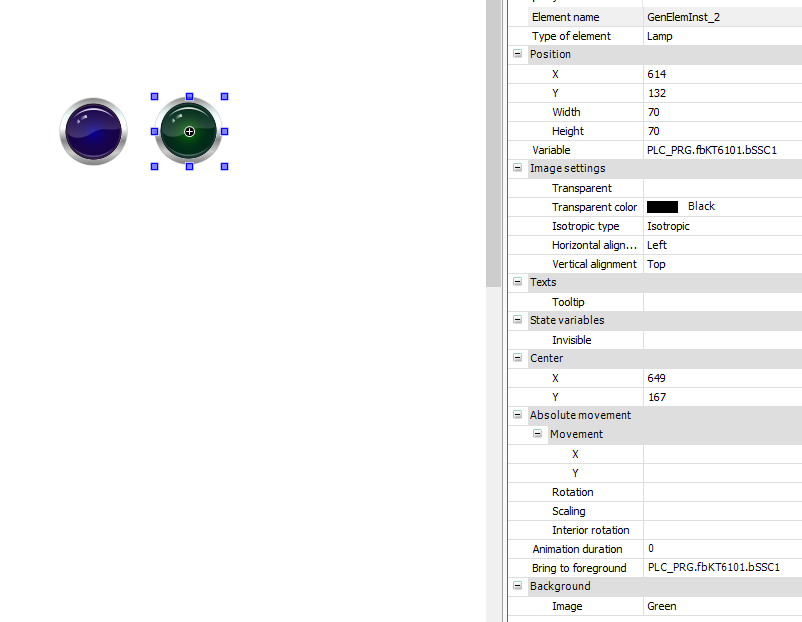
Je supperpose les deux voyants sur l'IHM :
- si le voyant Bleu est actif, il passera au premier plan
- si le voyant Vert est actif, il passera au premier plan
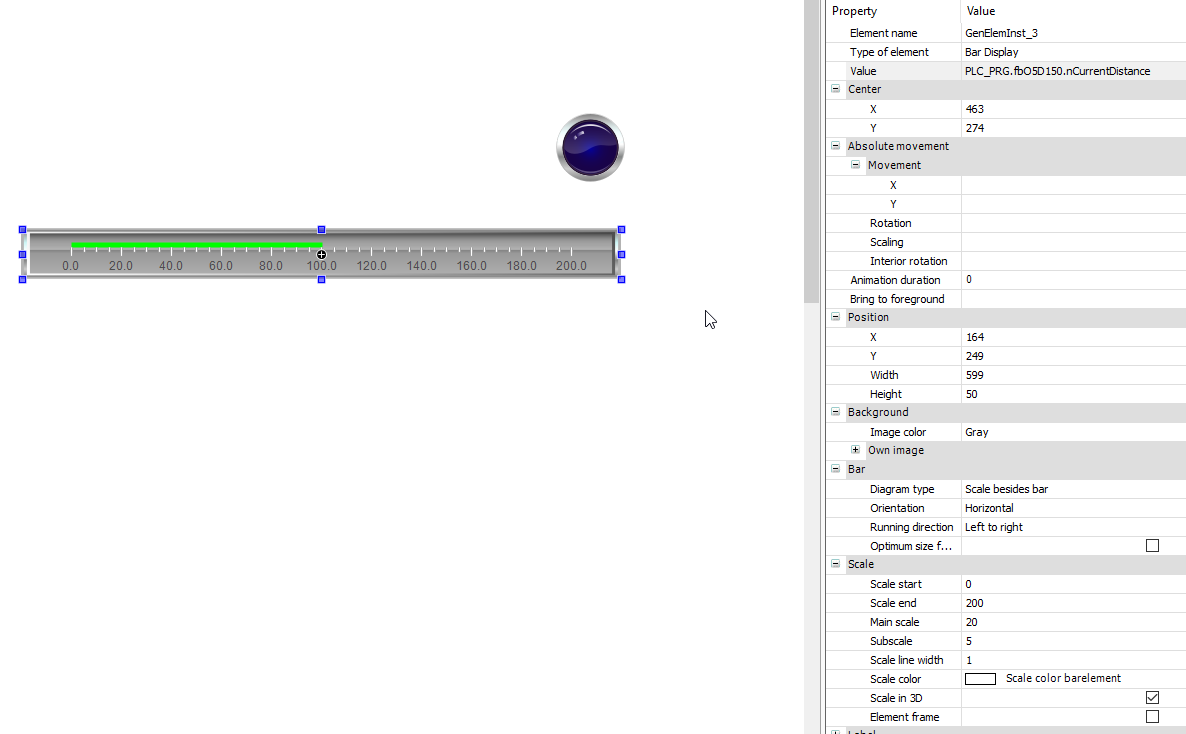
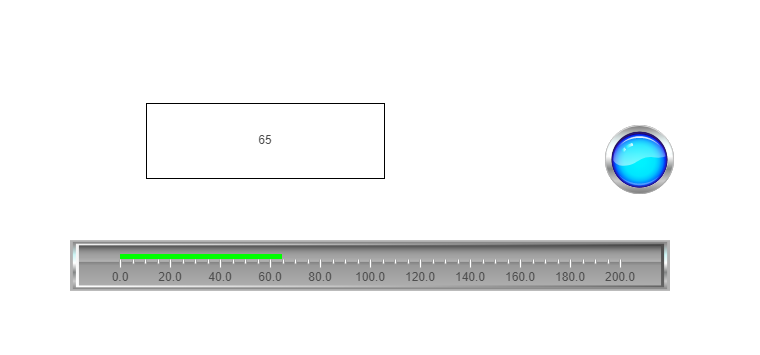
Une jauge de distance est également placée :
- la variable associée à la jauge est
PLC_PRG.fbO5D150.nCurrentDistance - Scale End est configuré à 200 pour la distance max du capteur en cm
- Main Scale est placée à 20
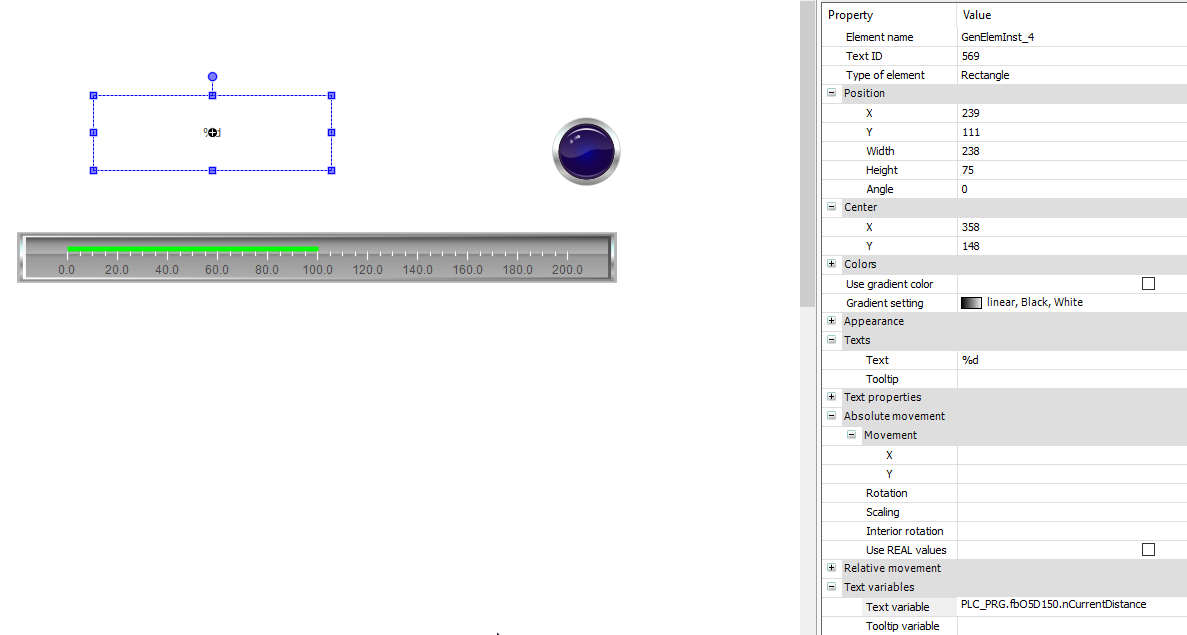
On souhaite également afficher la distance dans un champ, nous placerons ainsi un rectangle qui servira de champ de visualisation :
Dans le champ Text, nous mettrons :
-
%dpour la valeur à afficher en Int
Dans le Champ Text variable, nous mettrons :
-
PLC_PRG.fbO5D150.nCurrentDistance
Il reste à faire la connexion au Raspberry Pi et lancer le Runtime :
- Generate, Login, Start
Et l'IHM s'anime en fonction des mesures et appuis sur les capteurs.
WebVisu
Il est possible de récuperer cette IHM sur une page Web à travers la WebVisu.
- On place l’adresse IP du Raspberry Pi dans le navigateur de la tablette suivi du numéro de port 8080 et l’on charge la page webvisu.htm
- 192.168.1.15:8080/webvisu.htm
- On peut visualiser la mesure de distance faite par le capteur ainsi que les appuis sur le bouton capacitif