| 1.
| Vérifier que la zone de travail est libre.
[](https://innovation.iha.unistra.fr/uploads/images/gallery/2023-06/fK9image.png)
Si le robot n’est pas dans sa position d’origine au démarrage, la peau capacitive ne pourra être calibrée et le robot ne pourra fonctionner en mode collaboratif. Il faudra alors insérer la clé pour désactiver les sécurités et le déplacer dans sa position d’origine en mode manuel (bouton d'acquittement actif)
| [](https://innovation.iha.unistra.fr/uploads/images/gallery/2023-06/image.png)
|
| 2.
| Relâcher les **2 boutons d’arrêt d’urgence** en les tournant dans le sens horaire : - Sur l’écran tactile
- Sur la base du robot
| [](https://wiki.arn-test.noho.st/uploads/images/gallery/2023-03/UNd0-teach-panel.png)[](https://wiki.arn-test.noho.st/uploads/images/gallery/2023-03/4oK3-controller-panel.png)
|
| 3.
| Vérifier que l'arrêt d'urgence de la pince n'est pas enclenché. Le cas échéant, tirer sur les doigts de la pince.
[](https://innovation.iha.unistra.fr/uploads/images/gallery/2023-06/fK9image.png)
Si la pince est en collision avec un objet, ce qui empêche de tirer sur les doigts, déplacer le robot en mode manuel.
| |
| 4.
| **Enclencher l'interrupteur à clé « Freigabe Sonderfunktion »** **(Autorisation fonction spéciale)**Pour ponter les dispositifs de protection :
- La housse réactive
- La surveillance du débattement de la pince.
| [](https://wiki.arn-test.noho.st/uploads/images/gallery/2023-03/6-key-special-functions.png)
|
| 5.
| Tourner **l’interrupteur principal** électrique en Position I | [](https://wiki.arn-test.noho.st/uploads/images/gallery/2023-03/1-main-electrical-switch.png)
|
| 6.
| Appuyer sur le **Bouton d’acquittement** pendant la phase d’initialisation du robot (calibrage caméra et peau). - Ce bouton est aussi dit « dispositif homme mort ».
- Si la peau capacitive est désactivée (avec la clé), ou n’est pas encore calibrée (démarrage du robot), alors le mouvement du robot ne peut être commandé qu’avec ce bouton activé.
Ce bouton a trois positions :
- Enfoncé à moitié : acquittement actif mouvement robot autorisé, même si la peau capacitive n’est pas active
- Relâché ou enfoncé complètement : acquittement annulé. Le mouvement du robot ne peut être commandé que si la peau capacitive est active et calibrée.
| [](https://wiki.arn-test.noho.st/uploads/images/gallery/2023-03/5-dead-man-switch.png)
|
| 7.
| Démarrer le contrôleur du robot sur le **Panneau de commande** lorsque demandé pendant la phase d’initialisation « Steuerung Ein ». Rester appuyer 1 à 2 secondes. Le bouton d’acquittement doit être activé car la peau capacitive n’est pas encore active. | [](https://wiki.arn-test.noho.st/uploads/images/gallery/2023-03/4oK3-controller-panel.png)
|
| 8.
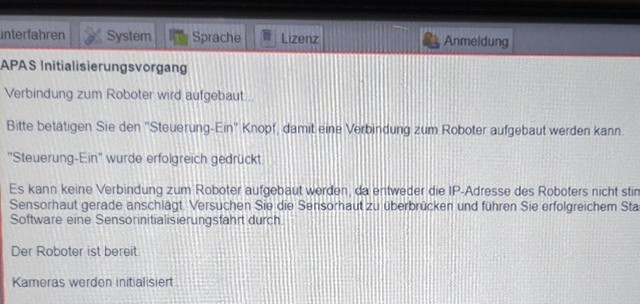
| Attendre l’ouverture du logiciel de programmation du robot et le message demandant l’allumage du contrôleur du robot « Steuerung-Ein ». Traduction : **Procédure d’initialisation APAS**
- Établissement de la connexion au robot
- Appuyez sur le bouton d’allumage du contrôleur
- Le bouton a bien été appuyé
- Le robot est prêt
- Les caméras sont initialisées
| [](https://wiki.arn-test.noho.st/uploads/images/gallery/2023-03/SQG4-initialization-german.jpg)
|
| 9.
| Appuyer sur le bouton « Accoster la position d'origine »
| [](https://innovation.iha.unistra.fr/uploads/images/gallery/2023-06/72Aimage.png)
|
| 10.
| Appuyer sur le bouton « course d’initialisation housse réactive »
- Le robot va effectuer le calibrage de ses capteurs
- Rester assez loin du robot pendant cette période.
| [](https://innovation.iha.unistra.fr/uploads/images/gallery/2023-06/S86image.png)
|
| 11.
| Retirer la clé et rallumer le contrôleur. Le robot est à nouveau en mode collaboratif.
| [](https://wiki.arn-test.noho.st/uploads/images/gallery/2023-03/6-key-special-functions.png)
|