| 1.
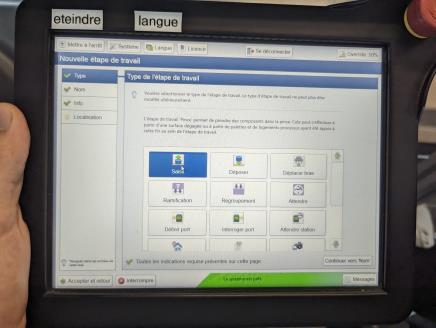
| Créer un nouveau bloc « Saisir »
| [](https://innovation.iha.unistra.fr/uploads/images/gallery/2025-03/k0Oimage.png)
|
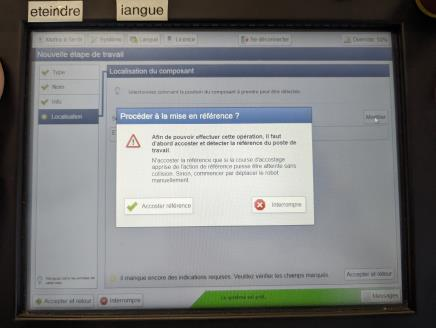
| 2.
| Accoster la référence si cette étape est demandée
| [](https://innovation.iha.unistra.fr/uploads/images/gallery/2025-03/QMQimage.png)
|
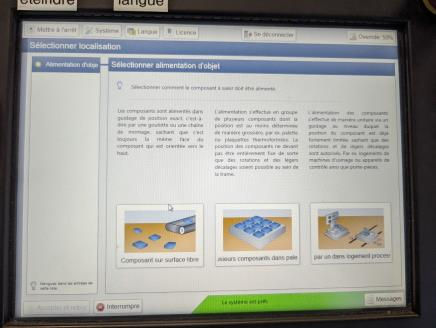
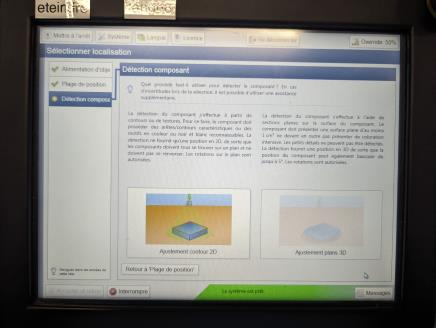
| 3. | Choisir « Composant sur surface libre »
| [](https://innovation.iha.unistra.fr/uploads/images/gallery/2025-03/vEMimage.png)
|
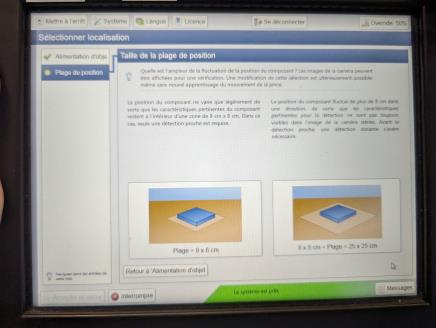
| 4. | Choisir la plage. Dans notre cas « Plage < 8 x 8 cm »
| [](https://innovation.iha.unistra.fr/uploads/images/gallery/2025-03/FdOimage.png)
|
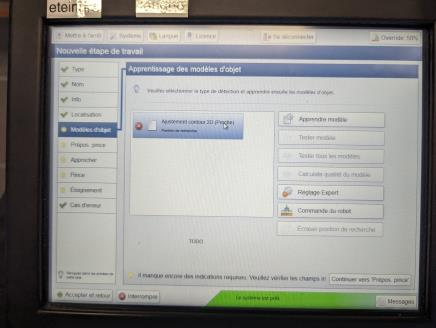
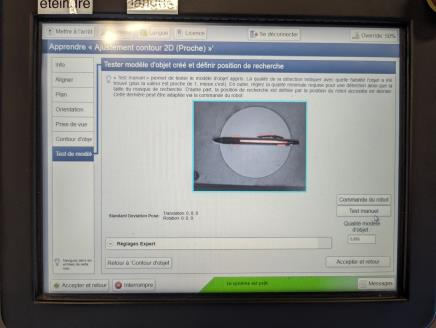
| 5. | Cliquer sur « Ajustement contour 2D »
| [](https://innovation.iha.unistra.fr/uploads/images/gallery/2025-03/xeZimage.png)
|
| 6. | Cliquer sur « Apprendre le modèle »
| [](https://innovation.iha.unistra.fr/uploads/images/gallery/2025-03/ZfVimage.png)
|
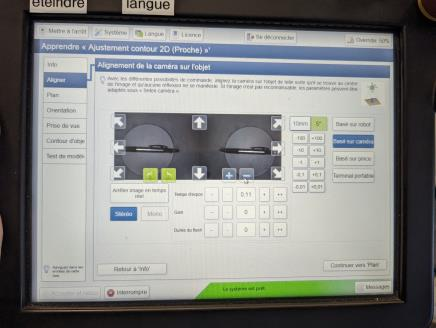
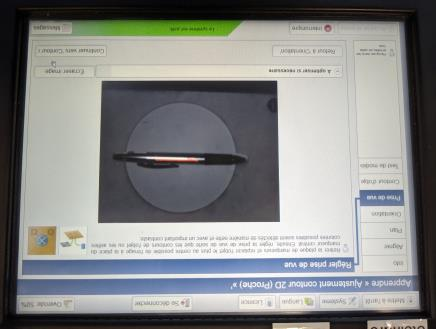
| 7. | Déplacer la caméra afin qu'elle se trouve à environ 20 cm au-dessus de l’objet et que l’objet soit au centre de l’image.
| [](https://innovation.iha.unistra.fr/uploads/images/gallery/2025-03/DUzimage.png)
|
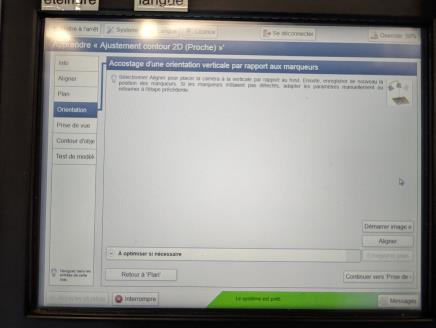
| 8. | Remplacer l’objet par le marquage et centrer la croix dans le rond
inférieur gauche du marquage.
| [](https://innovation.iha.unistra.fr/uploads/images/gallery/2025-03/iIzimage.png)
|
| 9. | Cliquer sur « aligner »
| [](https://innovation.iha.unistra.fr/uploads/images/gallery/2025-03/Ic4image.png)
|
| 10. | Cliquer sur « Écraser l’image »
| [](https://innovation.iha.unistra.fr/uploads/images/gallery/2025-03/ZJTimage.png)
|
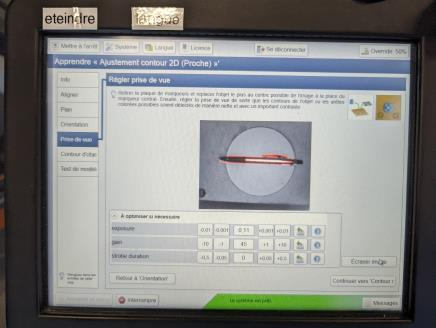
| 11. | Optimiser les contours de l’objet en augmentant le gain de l’image. Cela permet au robot d’apprendre au mieux l’objet.
| [](https://innovation.iha.unistra.fr/uploads/images/gallery/2025-03/zquimage.png)
|
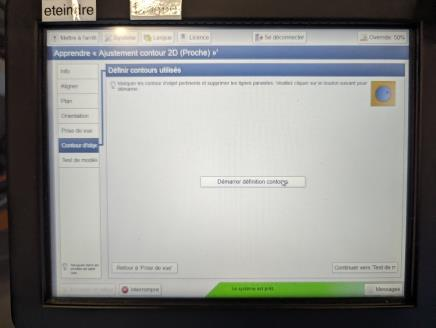
| 12. | Cliquer sur « Démarrer la définition du contour »
| [](https://innovation.iha.unistra.fr/uploads/images/gallery/2025-03/rVyimage.png)
|
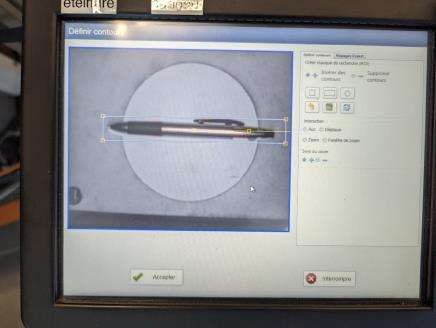
| 13. | Sélectionner le rectangle en haut à droite et cliquer sur l’objet afin de déposer le rectangle puis l’agrandir pour y faire entrer l’objet.
| [](https://innovation.iha.unistra.fr/uploads/images/gallery/2025-03/KASimage.png)
|
| 14. | Effectuer le « test manuel ». Plus la qualité modèle d’objet se rapproche de 1 plus le robot à bien appris la forme de l’objet.
| [](https://innovation.iha.unistra.fr/uploads/images/gallery/2025-03/PBiimage.png)
|
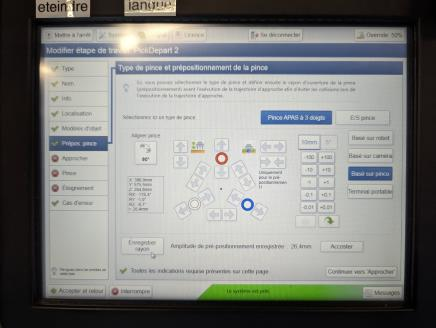
| 15. | Vous pouvez cliquer sur le bouton « 90° » afin de remettre la caméra en direction du sol.
Augmenter l’écart entre les pinces afin de préparer le robot à attraper l’objet. Avec le bouton « <- -> ». Une fois que les pinces sont assez écartées et bien orientées, cliquer sur « enregistrer rayon ».
| [](https://innovation.iha.unistra.fr/uploads/images/gallery/2025-03/g5uimage.png)
|
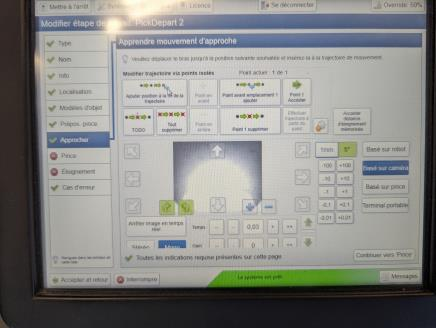
| 16. | Il faut maintenant utiliser les commandes de déplacement du robot pour positionner la pince en position de saisie de l'objet.
[](https://innovation.iha.unistra.fr/uploads/images/gallery/2023-06/fK9image.png)
On est obligé de s'approcher très proche du plateau. Faire très attention de ne rien percuter. Pour cela baisser le pas de déplacement à 1 mm.
Lorsque le robot est près à saisir l’objet cliquer sur « Ajouter position à la fin de la trajectoire ». Le robot retiendra alors les coordonnées.
| [](https://innovation.iha.unistra.fr/uploads/images/gallery/2025-03/Kbbimage.png)[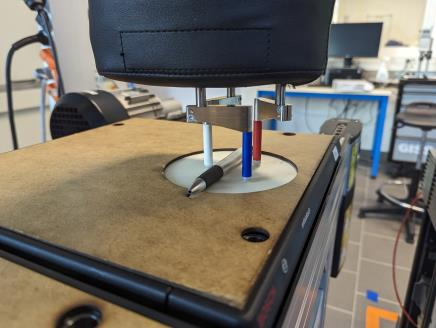](https://innovation.iha.unistra.fr/uploads/images/gallery/2025-03/SMyimage.png)
|
| 17. | Cliquer sur « accéder ». Le robot va alors saisir/atteindre l’objet.
| [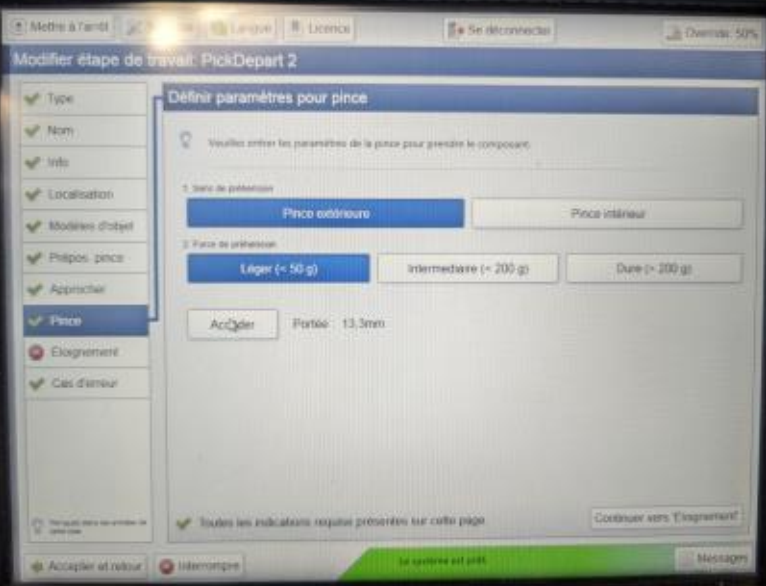](https://innovation.iha.unistra.fr/uploads/images/gallery/2025-03/3T5image.png)
|
| 18. | Il faut maintenant programmer l’éloignement du robot lorsqu’il a saisi l’objet. Vous pouvez appuyer sur « - » deux ou trois fois afin de faire remonter le APAS et enfin cliquer sur « Ajouter position à la fin de la trajectoire ».
| [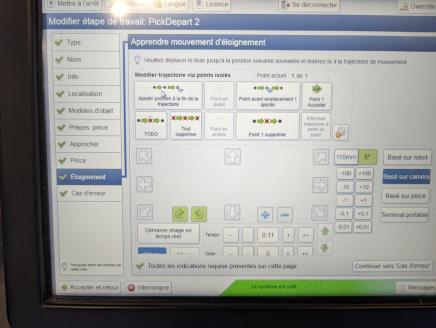](https://innovation.iha.unistra.fr/uploads/images/gallery/2025-03/7agimage.png)
|