Démarrage et utilisation basique
- Présentation du Sherpa B
- Allumage, déblocage des roues et follow-me
- Création et lancement d'une mission simple
- Rechargement batterie
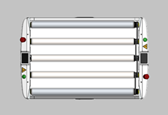
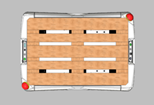
Présentation du Sherpa B
Le Sherpa est un véhicule sans conducteur, qui assiste l’opérateur à la manutention et à la préparation de
commandes en transportant des charges sur son plateau ou son convoyeur supérieur. Il peut se déplacer de façon
collaborative ou autonome.
Matériel et Logiciel
Capteurs LIDAR
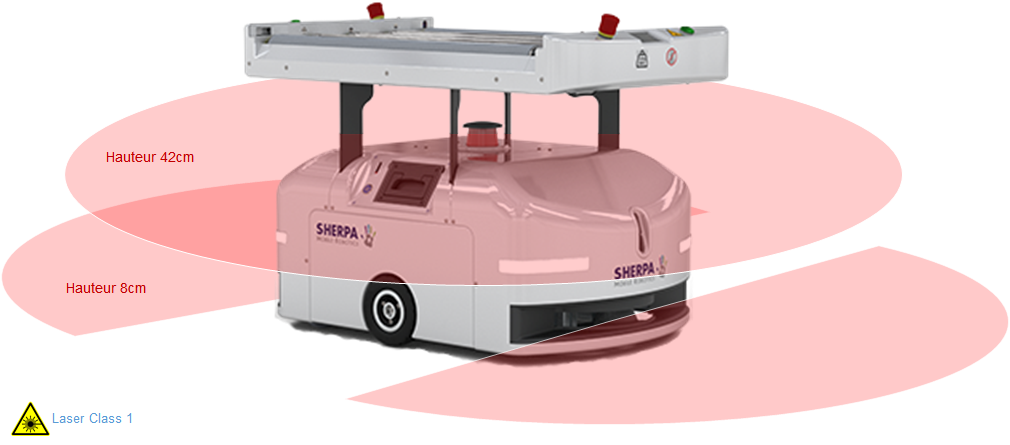
- Le LIDAR (LIght Detection And Ranging) 360° de localisation et navigation se trouve au centre du robot sous le plateau supérieur à ~42cm de hauteur.

Ce LIDAR est un capteur optoélectronique qui scanne le périmètre sur un plan horizontal à l’aide d’un faisceau laser qui tourne à 360°. Il effectue 90 000 mesures à la seconde (rotation 25 tours par seconde) avec une résolution angulaire de 0,1°, avec une portée de 40 m. Plus on s'éloigne plus la résolution angulaire baisse, donc on limite logiciellement à 30m.
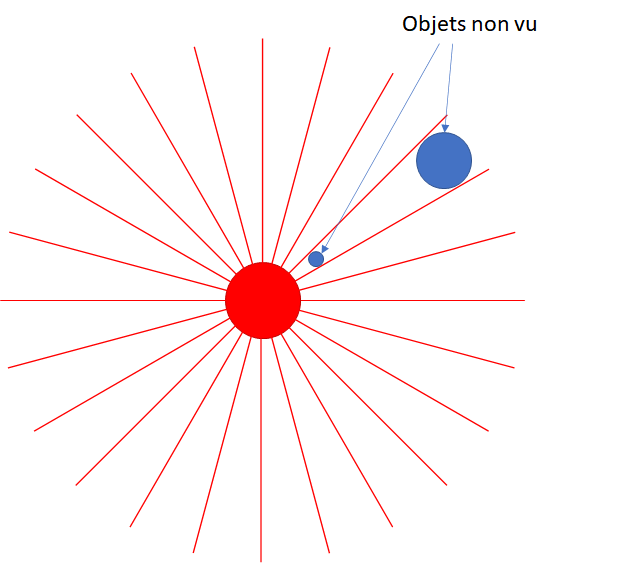
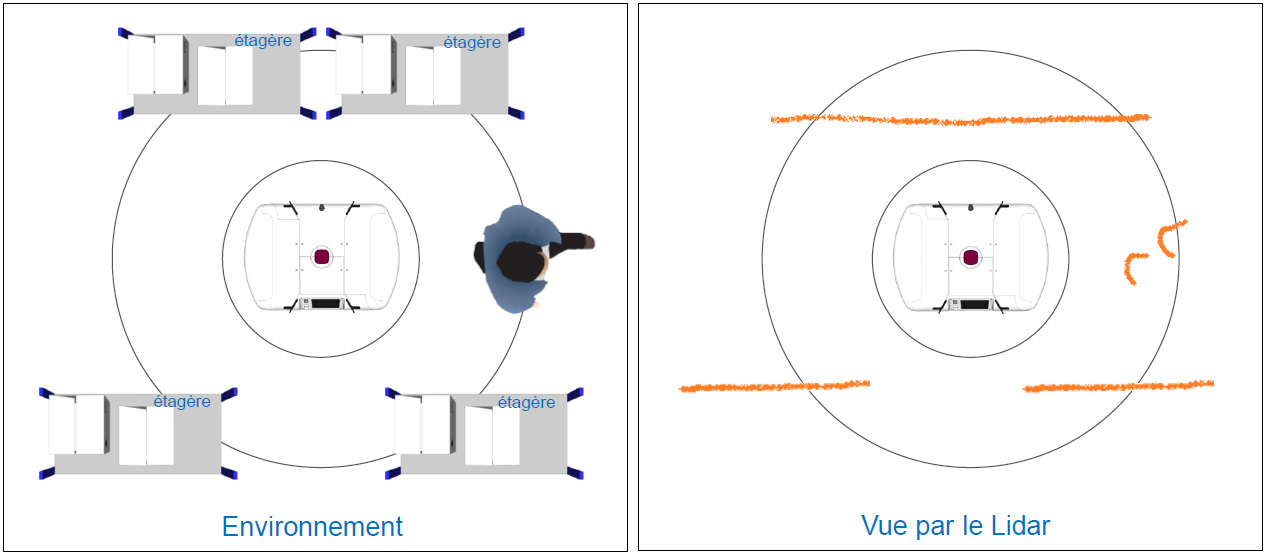
Il mesure la distance de chaque obstacle que le faisceau va rencontrer sur sa trajectoire. Cela permet d’obtenir une cartographie des éléments présents autour du Sherpa® sur ce plan horizontal à une hauteur de 420 mm. Le robot traite ces distances afin de reconstruire une carte 2D des éléments détectés. Les mesures sont alors transformées en un nuage de points représentant les contours visibles des objets environnants
- Les LIDAR 180° de sécurité avant et arrière
Chaque capteur couvre un angle de 180°. Ils couvrent donc le périmètre qui se trouve devant la trajectoire du robot. Ils sont placés au raz du sol (environ 7 cm) de façon à scanner tout ce qui pourrait entrer en collision avec le robot et que le LIDAR 360° ne verrait pas car se trouvant en dessous de son faisceau.
Pupitre d'opération
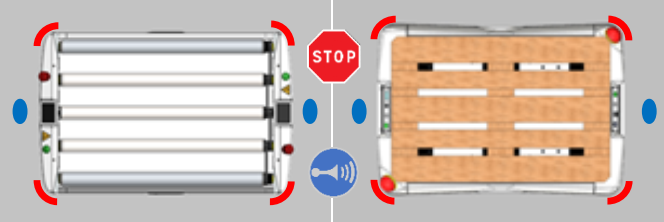
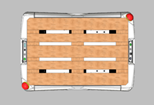
Situés à l’avant et l’arrière pour les Sherpa B classiques et seulement à l’avant pour les Sherpa B à convoyeur frontal. Ces pupitres sont composés d’un bouton d’arrêt d’urgence, d’une interface tactile et d’un bouton vert.

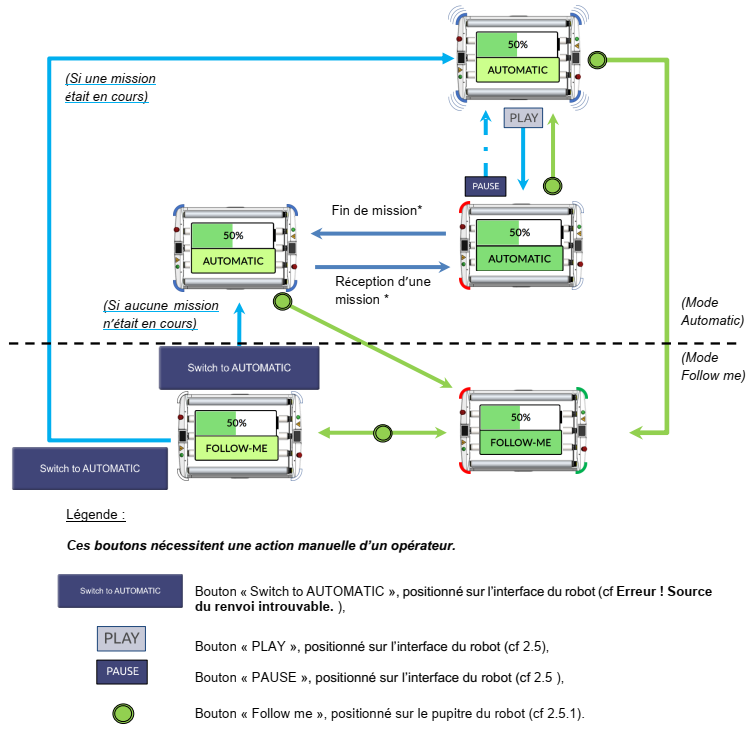
Enclencher le bouton d’arrêt d’urgence arrête totalement le mouvement du robot. Cependant, le robot ne s’éteint pas pour autant et déverrouiller l’arrêt d’urgence signifie pour le robot, qu’on valide la reprise de ses opérations. Ainsi, si une mission était en cours, le robot reprend sa mission. On note qu’il existe une option pour attendre une validation via le bouton vert suite à un arrêt d’urgence enclenché puis déclenché. L’utilisation de l’interface tactile et du bouton vert seront décrites plus tard dans ce document.
Localisation
La localisation est l’algorithme qui permet au robot de connaître sa position en temps réel. Il est basé sur les positions précédentes du robot et doit donc être initialisé. Cet algorithme est indépendant des autres et tourne en permanence (pendant le mode autonome mais aussi pendant le mode suiveur). Il utilise seulement les données du capteur LIDAR central. La localisation fonctionne avec une carte créée avec le logiciel MapFabric. Par ailleurs, on note qu’il faut que la carte comporte seulement des éléments fixes.
Guidage global
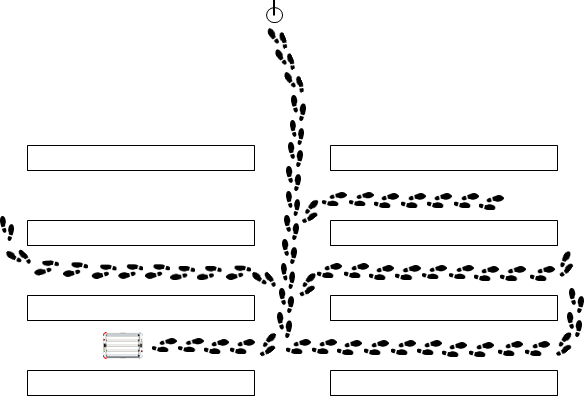
Le guidage global est l’algorithme qui permet au robot, lors d’une mission, de calculer une trajectoire entre sa position courante et la destination souhaitée. Cet algorithme ne tient pas compte des obstacles qui ne sont pas dans sa carte. Il tient compte en revanche des zones de circulation et des zones interdites. Le programme cherche toujours la trajectoire la plus rapide afin de rejoindre sa destination.
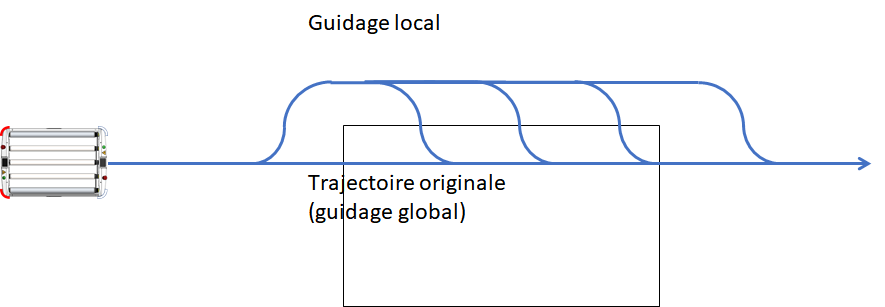
Guidage local
Le guidage local est le programme qui permet au robot de suivre la trajectoire définie par le guidage global. Il prend en compte les obstacles rencontrés qui ne sont pas dans la carte. Si le robot doit contourner un obstacle sur sa trajectoire d’origine, le robot cherchera à rejoindre sa trajectoire initiale au plus vite.
Vitesse du robot
Le robot sélectionne automatiquement sa vitesse afin de suivre au mieux sa trajectoire. Il est toutefois possible de limiter la vitesse maximum du robot en mode automatique de plusieurs manières :
- Dans les paramètres :
- Sherpa B : Cette vitesse est réglée par défaut à 1.5m/s pour un robot 100kg et 1.1m/s
pour un robot 200kg - Sherpa P : Cette vitesse est réglée par défaut à 1.1m/s pour un robot 1000kg et 1.4m/s
pour un robot 500kg.
- Sherpa B : Cette vitesse est réglée par défaut à 1.5m/s pour un robot 100kg et 1.1m/s
- Dans une zone (RoadEditor)
- Dans la mission (MissionEditor)
A un instant donné, si une ou plusieurs valeurs de vitesse maximale sont différentes, le robot choisira alors la plus basse des trois
Modes de fonctionnement
| Signalétique | Situation | Description |
|
Initialisation |
||
|
|
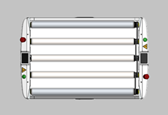
en cours d’initialisation | 4 phares rouges et blue spots allumés 5 tons à la fin de l’initialisation |
|
|
roues débloquées |
Clignotement simultané des 4 phares en blanc
|
|
|
roues bloquées |
4 phares blanc fixes
|
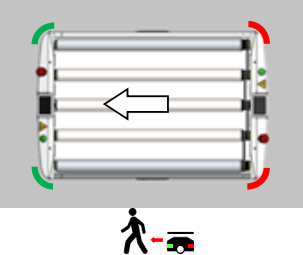
| Mode Follow-me | ||
|
|
stand by initialisé | Prêt à être utilisé (mode Follow me) 4 phares fixes blancs
|
|
|
en mode Follow Me à l’arrêt |
Opérateur détecté 4 phares fixes verts
|
|
|
en mode Follow me | Opérateur suivi 2 phares avant verts, 2 phares arrière rouges
|
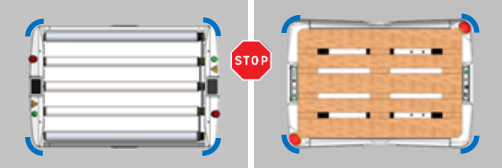
| Mode Autonome | ||
|
|
en mode Autonome à l’arrêt |
Prêt à être utilisé (mode Autonome) 4 phares bleus fixes
|
|
|
en pause mode autonome |
Clignotement bleu simultané des 4 phares
|
|
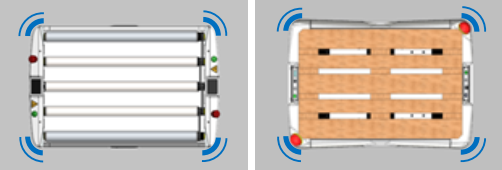
|
en déplacement | 2 phares avant blancs, 2 phares arrière rouges
|
|
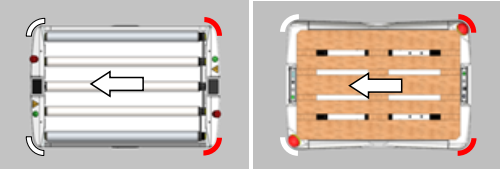
|
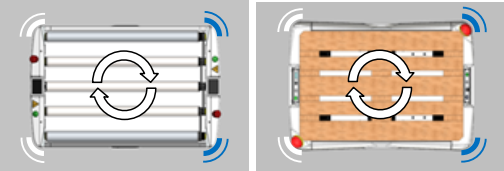
en mission | (Sans avancer / en rotation) Clignotement 2 phares avant blancs, 2 phares arrière bleus
|
|
|
Perte de localisation en mode auto | Clignotement cyan circulaire des 4 phares Action : Relocaliser le Sherpa à son point de référence
|

Défauts / Messages d'erreur
| Signalétique | Situation | Description |
|
Initialisation |
||
|
|
Perte de localisation en mode auto | Clignotement cyan circulaire des 4 phares Action : Relocaliser le Sherpa à son point de référence  |
|
|
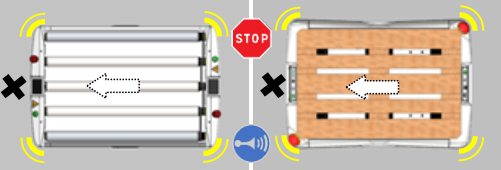
Détection d’un objet dans le périmètre du robot |
Clignotement jaune simultané Action : Retirer l’obstacle |
|
|
Détection d’un obstacle à l’avant que le Sherpa ne parvient pas à contourner | 4 phares jaunes fixes Action : Retirer l’obstacle |
|
|
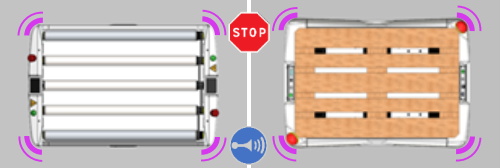
Batterie sous le seuil d'alerte ou de fonctionnement |
Clignotement violet avant puis arrière Action : Remplacer/ charger la batterie
|
|
|
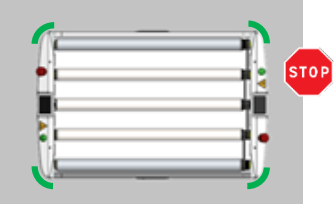
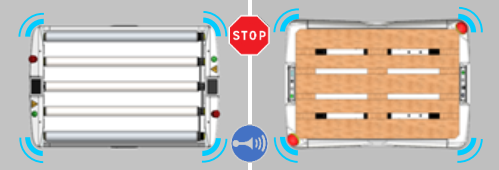
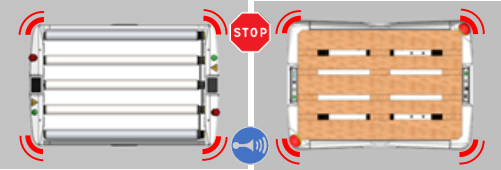
Arrêt de sécurité | Clignotement rouge simultané Action : Supprimer la cause Arrêt d’urgence enclenché Bord sensible activé Détection capteurs bas |
Allumage, déblocage des roues et follow-me
| N° de la tâche |
Description de la tâche | Références/Photos |
| 1 |
Allumer le Sherpa en appuyant sur le bouton Power.
|
|
| 2 |
Attendre quelque dizaines de secondes afin que le sherpa s’allume correctement |
|
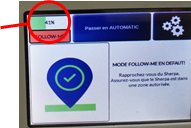
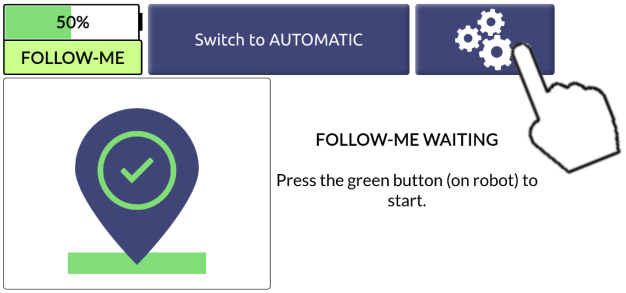
| 3 |
Lorsque le sherpa a fini de se lancer une image apparaît sur l’écran. Attendre quelques dizaines de secondes ou appuyer sur actualiser et l’image ci-contre apparaît. |
|
| 4 |
Pour éteindre le Sherpa, appuyer sur le bouton Power |
|



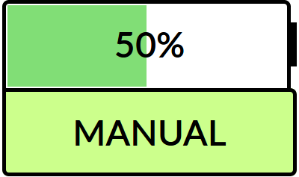
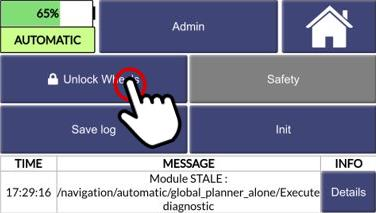
Mode Déblocage des roues
Après le démarrage du robot, on peut soit passer en mode Follow-Me, soit pousser le robot après avoir débloqué les freins. C’est nécessaire quand les AMR sont parqués dans la salle de TP à l’IUT, pour les faire passer dans un espace restreint, les charger dans un camion …
- On clique sur les engrenages
- On clique sur Unlock Wheels
On peut maintenant pousser le robot.
Attention, ce n’est pas parce que le Sherpa est débloqué que les sécurités ne sont plus actives. Il faut pousser le robot en conservant le maximum de distance entre le robot et ses pieds, sinon le Lidar appliquera la sécurité et le robot bloquera les freins. On préfèrera donc pousser le robot que de le tirer vers soi.
- Pour verrouiller à nouveau les freins, il faut cliquer sur Lock Wheels
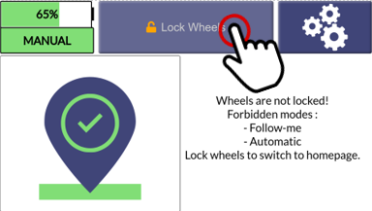
- Verrouiller les freins pour pouvoir déclencher les modes Follow-me ou autonome
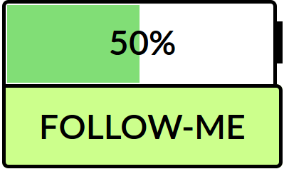
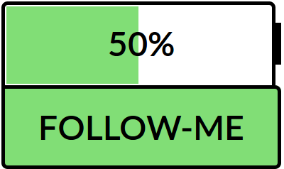
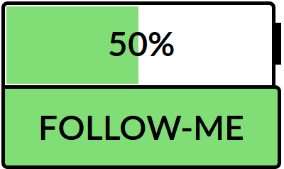
Mode Follow-me
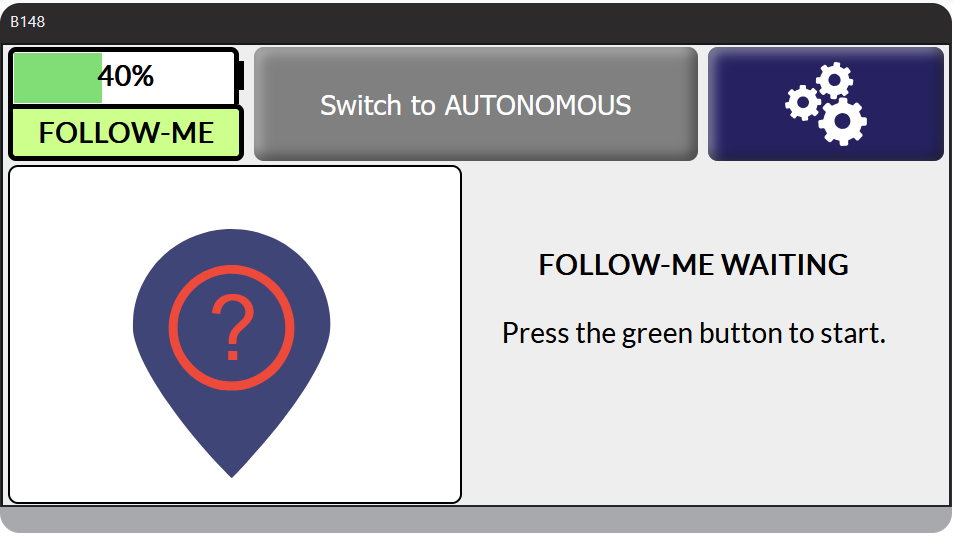
Le bouton Follow-me est le bouton vert à côté de l’écran d’affichage.
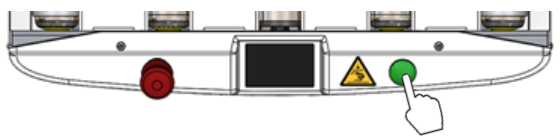
Pour accéder au mode Stand-by : il faut s’assurer que le robot ait été réarmé. Après un démarrage ou un arrêt d’urgence il est nécessaire d’appuyer sur le bouton de réarmement. Le bouton de réarmement est uniquement disponible sur le Sherpa B148 à l’IUT.
Le bouton réarmement (recycle) à coté du bouton Follow me sur le Sherpa B148.

Création et lancement d'une mission simple
Connexion à l'interface web du Sherpa
Connexion Wifi
L’identifiant Wifi des AMR Sherpa est Sherpa_B020 ou Sherpa_B148.
Les mots de passe wifi sont :
QmFseW9Ob3JjYW4=pour le Sherpa B020 (Convoyeur simple)BalyoNorcanpour le Sherpa B021/B020 (QLIO)B148SherpaMRpour le Sherpa B148 (Lève-Bac)
Il faut rester attentif à la connexion réseau du PC, il peut y avoir des bascules entre le wifi de l’AMR et le wifi Eduroam, notamment lors des phases de redémarrage du Sherpa.
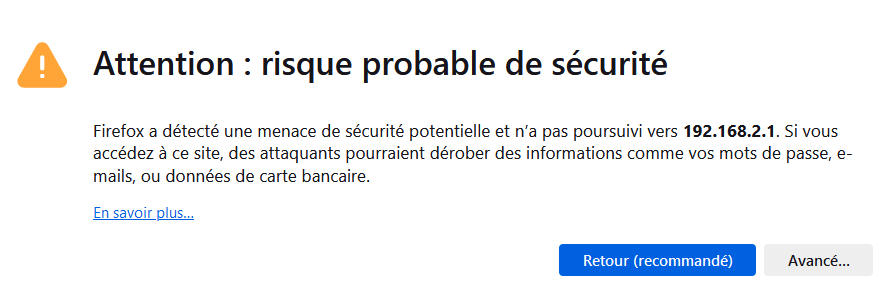
Connexion à l’interface
Il est fort probable que votre navigateur indique qu’il y ait un risque probable de sécurité. Pour Firefox, il faudra cliquer sur Avancé et Accepter le risque et poursuivre.
Login et Tool Suite
On arrive sur l’écran de login :

- Le login est info@sherpa-mr.com
- Le mot de passe est
MTIzNA==pour le Sherpa B148 et B020 (Y291ZGVydA==) coudertou1234pour le Sherpa B021/B020 (QLIO)
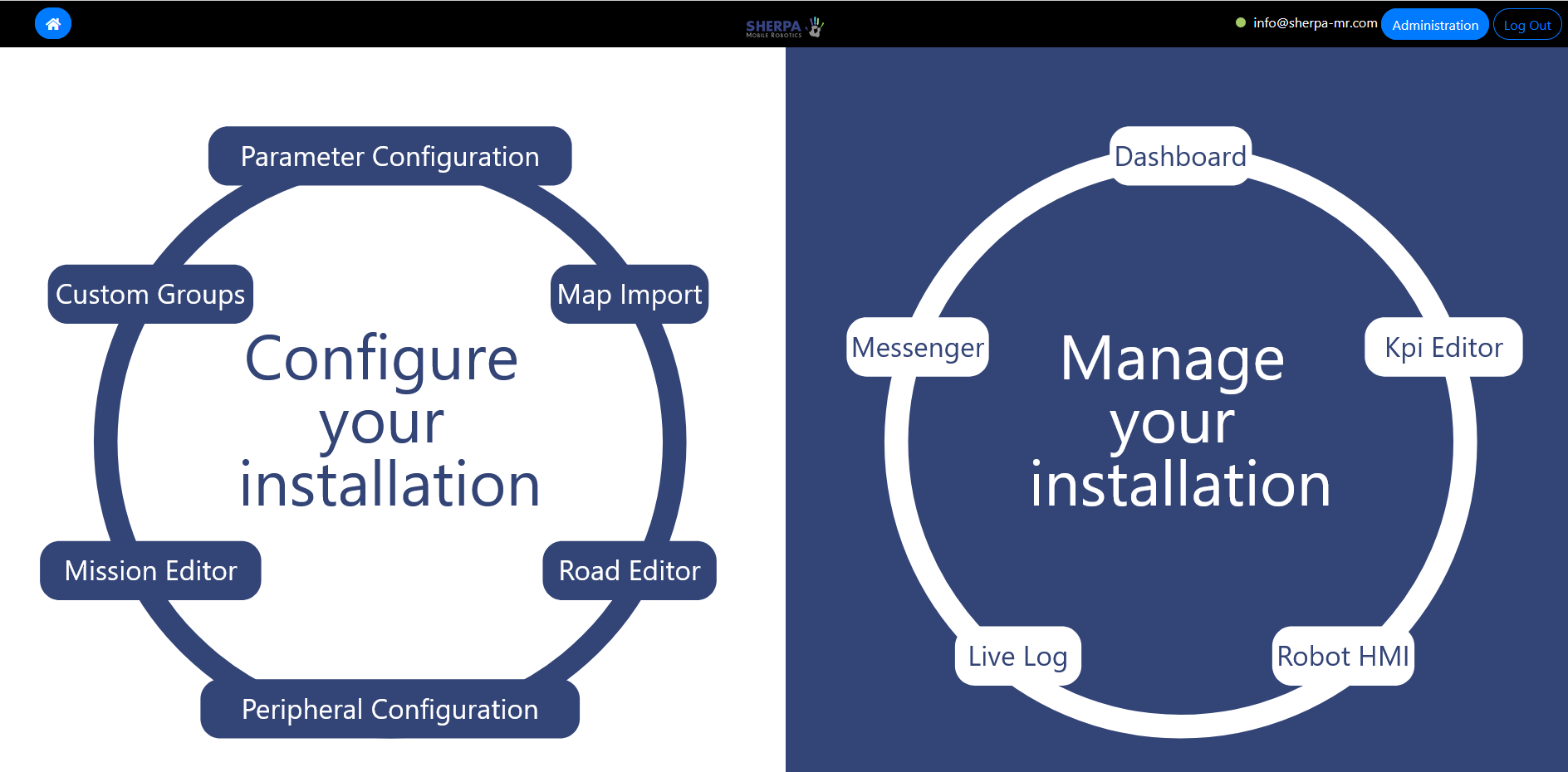
on arrive maintenant sur l’interface d’accueil de la Tool Suite :
Edition de mission
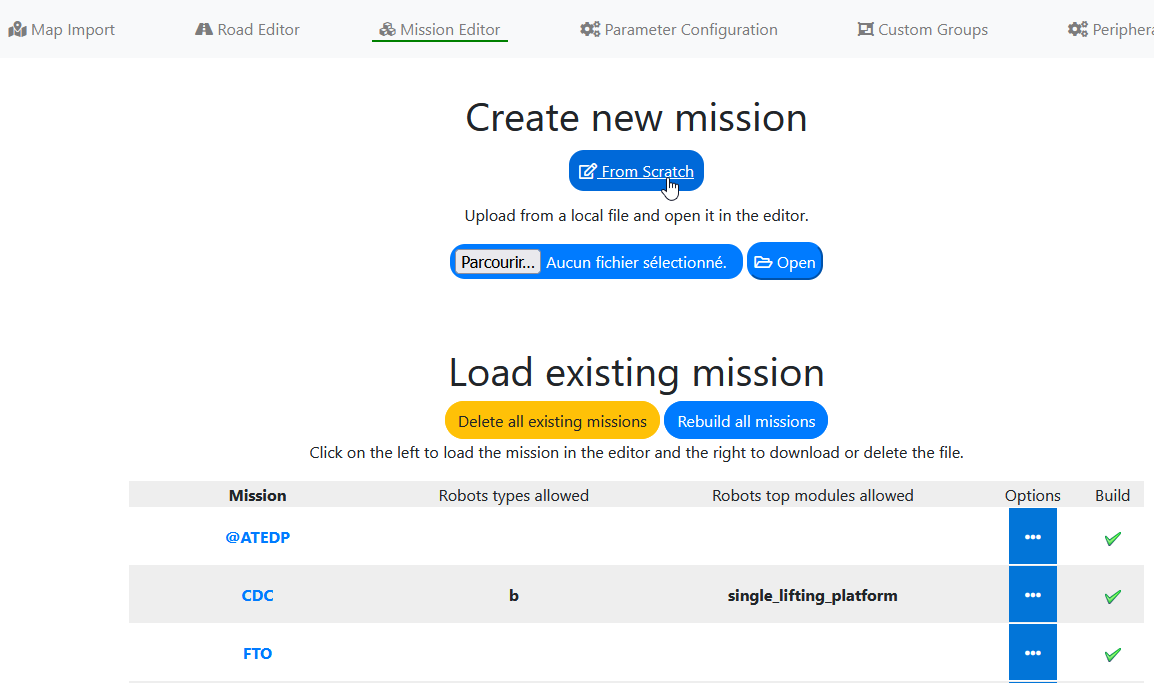
- Donner un nom à cette mission (pas de caractères latin, pas d’espace, …)
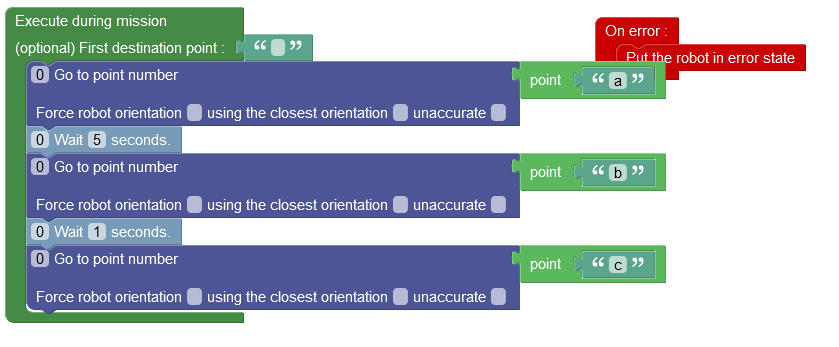
- On n’oublie pas de faire Save pour la mission !
- Pareil, le robot demandera la mise à jour du fleet manager et du robot, il suffira de suivre les cloches.
 |
|---|
 |
 |
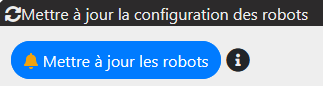 |
- Vérifier qu’à la fin de l’update du robot, il y ait un symbole v vert dans ‘Robot install config is up to date’

Initialisation du robot
On amène le robot sur le point d’initialisation (follow-me ou unlock wheel). On vérifie que la flèche du robot est orientée de la même manière que sur la route (map) que vous avez configurée.
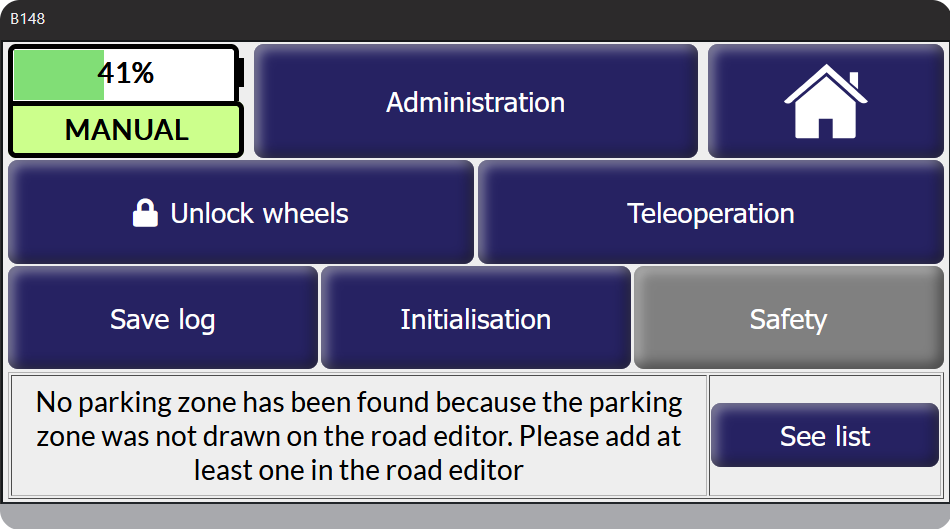
Comme nous venons de faire une nouvelle configuration du Sherpa, il va être complètement désorienté par rapport à la nouvelle cartographie. Depuis l’écran du Sherpa (clic Maison), vous devriez avoir l’indicateur de position au rouge.
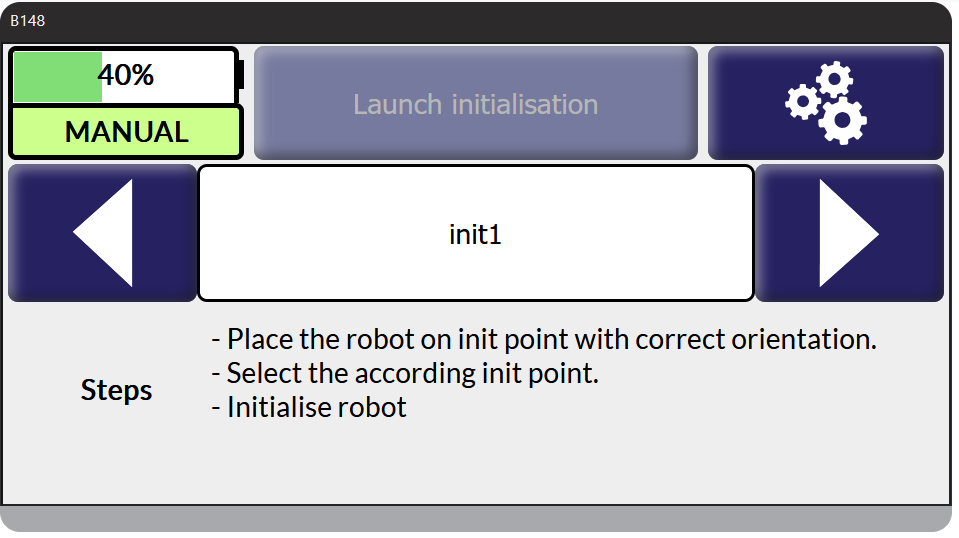
On clique sur les roues crantées :
On clique sur Initialisation et l’on choisit le point init1 où vous venez de placer le robot. On fait launch initialisation. Si init1 n’apparaît pas :
- vérifier que l’update du robot n’a pas été oubliée.
- vérifier qu’il y ait le symbole vert dans ‘Robot install config is up to date’.
- dernier recours, redémarrer le Sherpa.
et l’indicateur de position doit passer au vert.
Si l’indicateur ne passe pas au vert, vérifier le bon positionnement de votre robot par rapport à la map.
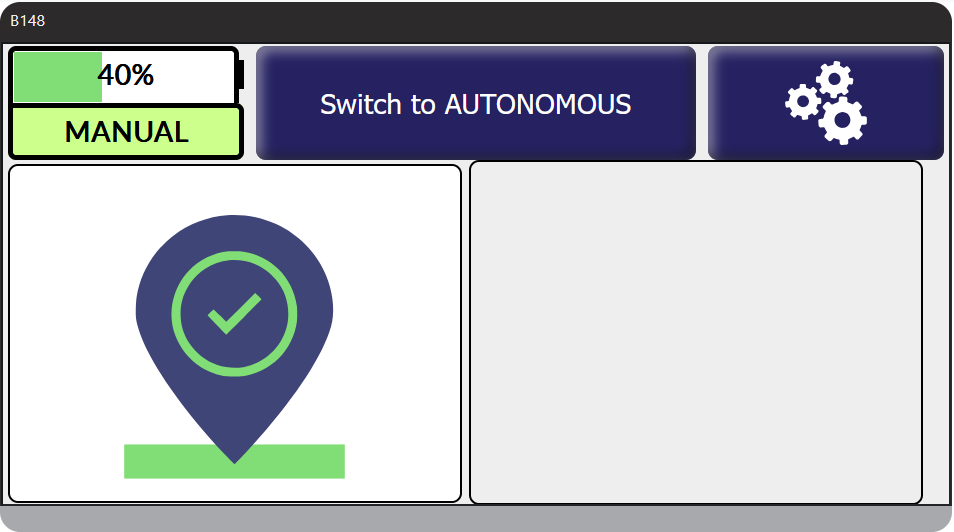
Quand l’indicateur de position est au vert :
Cliquer sur Switch to Autonomous
Lancement de la mission depuis le dashboard
Après avoir vérifié que vous avez cliqué sur switch to Autonomous sur l’écran du Robot, on peut lancer depuis le PC portable la mission que nous venons de créer.
En cliquant sur la petite maison en-haut à gauche, on revient sur le menu principal, et l’on pourra lancer le dash-board :

On peut alors utiliser le widget, Mission Laucher. La mission dans cet exemple s’appelle celka.
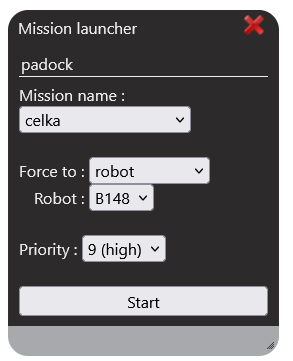
On fait Start et le robot devrait effectuer la mission.
Source https://celka.fr/ocw/robotics/sherpa/tp1/sherpa/
Philippe Celka Copyright © 2025 CC Attribution-Non Commercial-Share Alike 4.0 International
Rechargement batterie
| N° de la tâche | Description de la tâche | Références/Photos |
| 1 |
Lorsque vous avez finis d’utiliser le sherpa, vous devez mettre en charge le sherpa s’il est en dessous de 50%. |
|
| 2 |
Vous trouverez le chargeur en haut dans l’armoire. Pour pouvoir ouvrir l’armoire, il vous faut une clé qui est disponible au département QLIO. |
|
| 3 |
Vous devez sortir la batterie du sherpa. Pour cela, vous prenez la batterie délicatement par la poignée. |
|
| 4 |
Une fois le chargeur et la batterie sortie, vous devez les brancher. |  |
| 5 |
Une fois la batterie rechargée, vous devrez remettre la batterie dans le sherpa et le chargeur dans l’armoire |
|