# Utilisation avancée
# Cartographie d'une pièce
### Connexion à l'interface web du Sherpa
#### Connexion Wifi
L’identifiant Wifi des AMR Sherpa est **Sherpa\_B020** ou **Sherpa\_B148**.
Les mots de passe wifi sont :
- **QmFseW9Ob3JjYW4=** pour le Sherpa B020 (Convoyeur simple)
- **QjE0OFNoZXJwYU1S** pour le Sherpa B148 (Lève-Bac)
Il faut rester attentif à la connexion réseau du PC, il peut y avoir des bascules entre le wifi de l’AMR et le wifi Eduroam, notamment lors des phases de redémarrage du Sherpa.
#### Connexion à l’interface
A l’aide d’un navigateur on va se connecter à l’adresse `https://192.168.2.1:8000` qui correspond au server web de configuration de l’AMR.
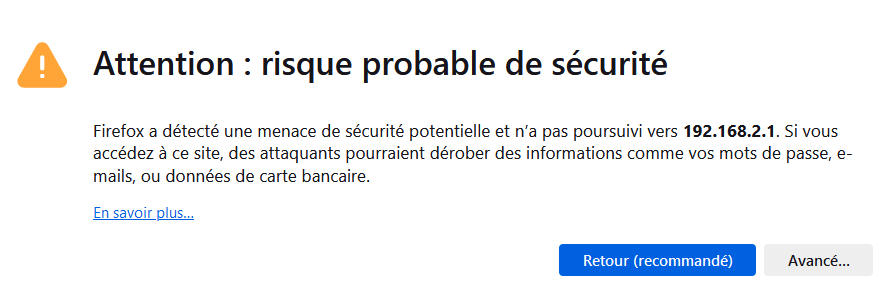
Il est fort probable que votre navigateur indique qu’il y ait un risque probable de sécurité. Pour Firefox, il faudra cliquer sur `Avancé` et `Accepter le risque et poursuivre`.
#### Login et Tool Suite
On arrive sur l’écran de login :
- Le login est
- Le mot de passe est MTIzNA== pour le Sherpa B148 et B020 (Y291ZGVydA==)
on arrive maintenant sur l’interface d’accueil de la Tool Suite :
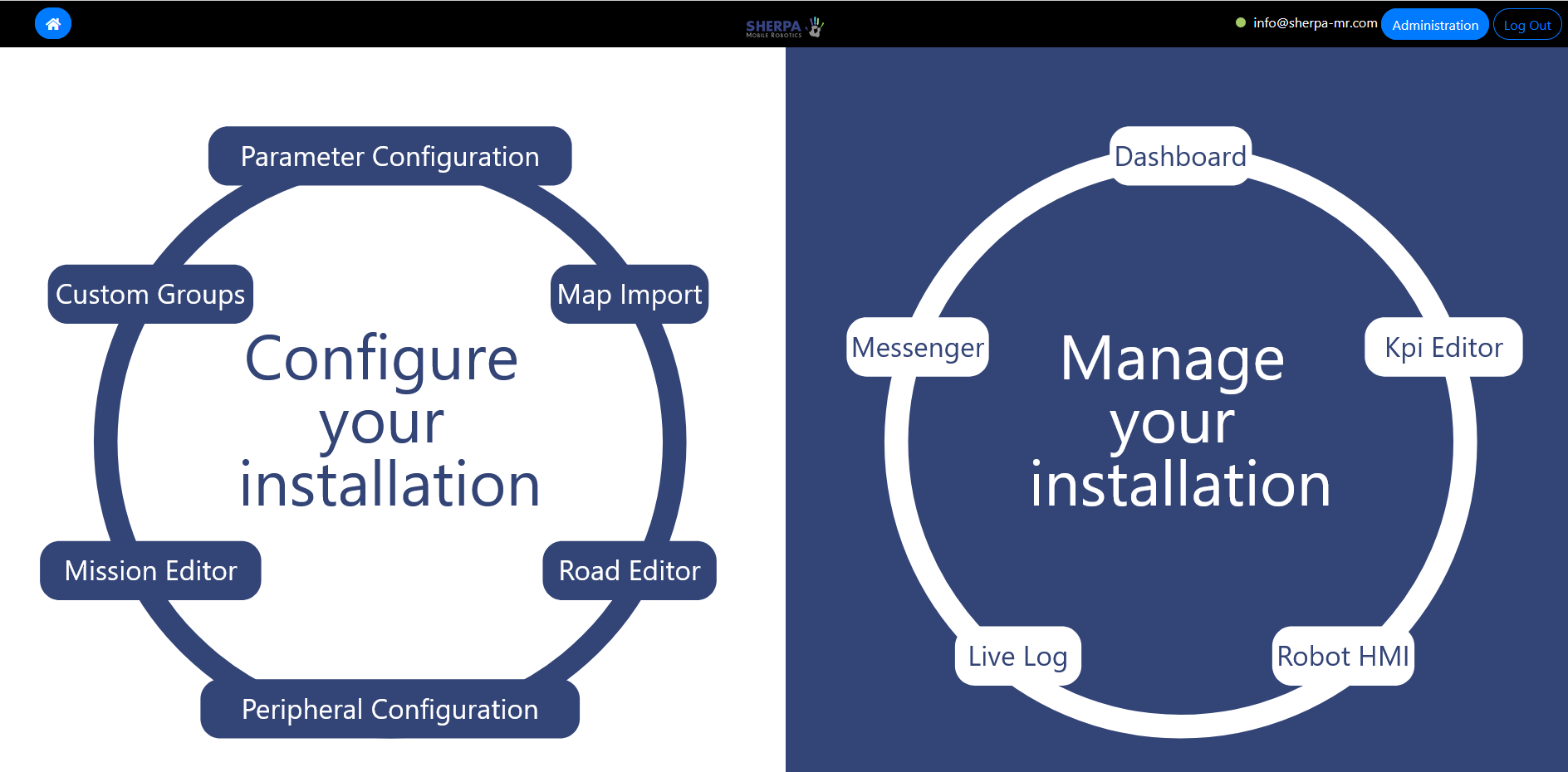### Les différentes étapes pour configurer une installation :
1. Créer la carte
2. Configurer les règles de circulation
3. Créer des missions
4. Configurer des périphériques
5. Configurer le robot
Les modifications du système impliquent une mise à jour du Fleet Manager (Il faut “suivre la cloche”)
La méthode est simple, on clique sur les différentes cloches quand on veut mettre à jour le Fleet Manager, puis le robot.
### Création d’une carte
La création de la carte est basée sur un enregistrement des données du LIDAR. Il faut déplacer le robot dans la zone à cartographier. L’enregistrement est un log circulaire d’une taille de 100Mo soit environ 10 minutes de parcours. Si l’on dépasse les 10 minutes les premières données d’enregistrement seront écrasées par les nouvelles mesures.
#### Positionnement du robot
L’orientation de la carte dépendra de la position du robot au début du log. Nous conseillons donc de placer le robot parallèlement à un mur afin de faciliter la création de la carte pour avoir une carte “droite” à l’écran.
Afin d’avoir une carte la plus précise possible, il faut suivre les conseils suivants :
- Passer deux fois dans chaque allée en venant de deux directions différentes ;
- Essayer de revenir fréquemment à une position déjà connue du robot afin d’ajouter seulement de petites boucles ;
- Marcher lentement en particulier devant les positions où le robot doit être précis ;
- Dans le cas de poteaux de docking, faire en sorte que le robot voit les poteaux depuis toutes les directions ;
- Si un objet « mobile » est devant un mur essayer de passer derrière l’objet pour que le robot voit le mur ;
- Le log continue même en cas d’arrêt d’urgence ou de déblocage des freins donc si une position n’est pas atteignable en follow-me, débloquer les freins et pousser le robot jusqu’à la position désirée.
Le fichier fait normalement une centaine de Mo.
### Sauvegarder le Log :
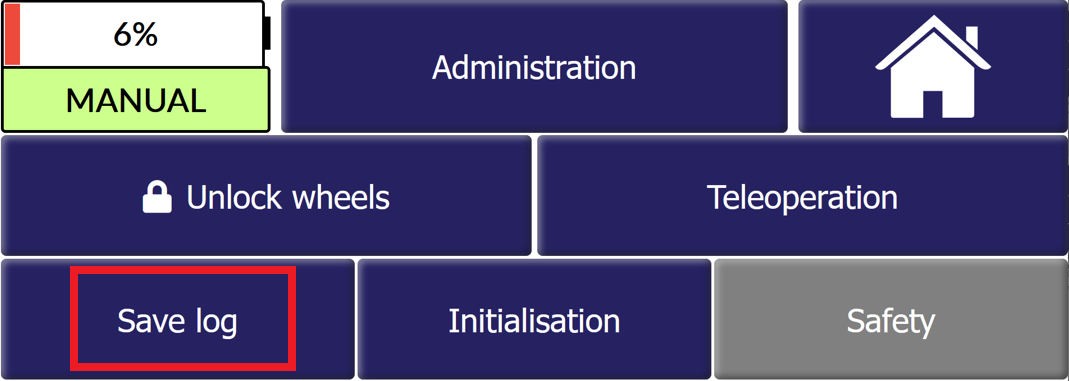
Une fois le parcours d’enregistrement terminé, il faut sauvegarder le log. Cette action permet de créer une sauvegarde du log sur le disque dur du robot. Une fois sauvegardé, la “temporisation” de 10 minutes est levée car une copie a été créé.
Depuis le menu de l’écran tactile du Sherpa, on clique sur `Save Log`
### Récupération du fichier de Log
On peut récupérer le fichier de Log par clé USB depuis le connecteur USB à côté du bouton de Power, mais aussi, plus facilement, directement par l’interface Web.
On clique sur :
- Administration
- Outils (Tools)
- Download `log.odo`
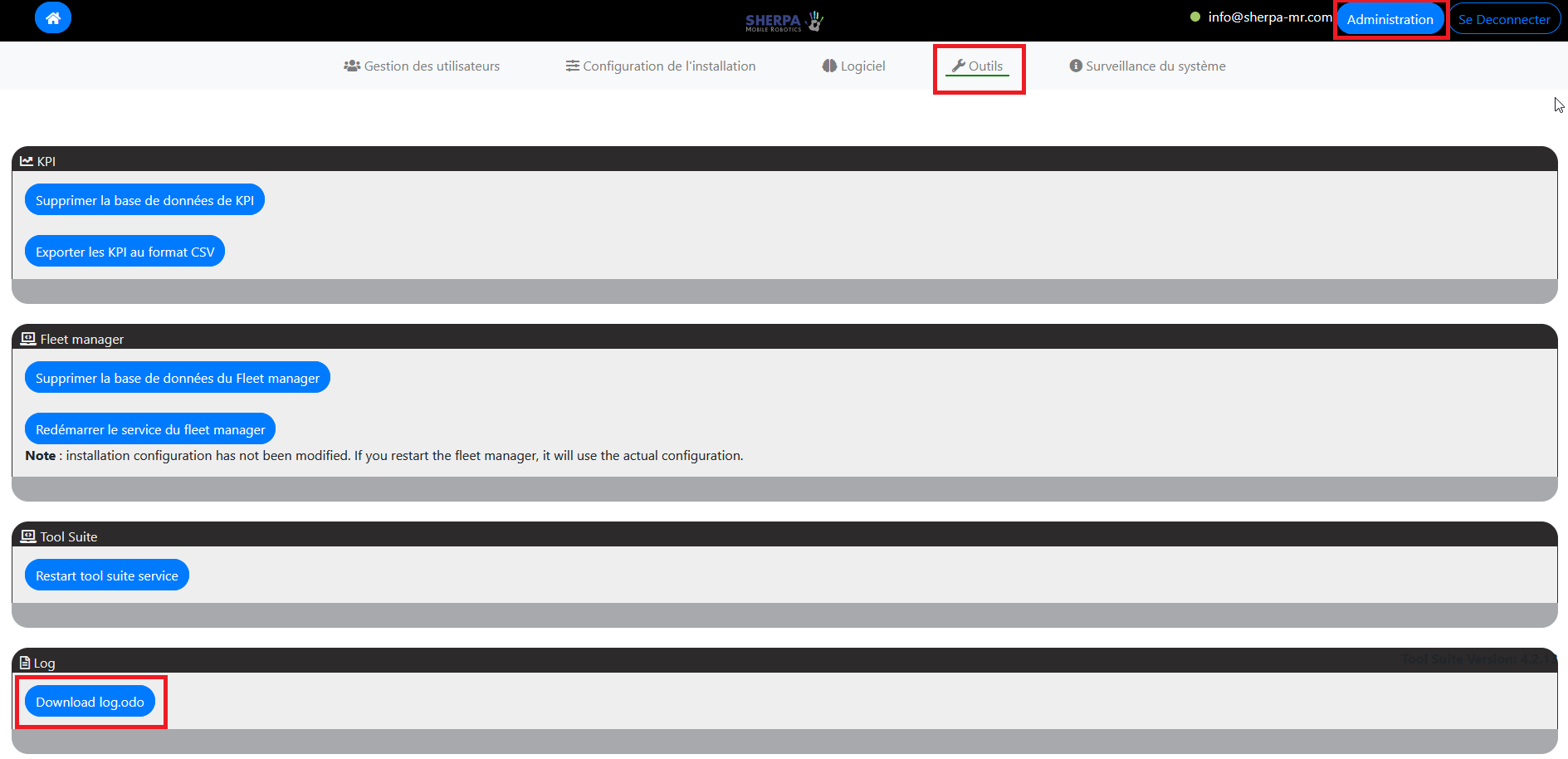Le fichier `log.odo` se trouvera dans vos `Téléchargements`. Pensez à vérifier la taille du fichier, elle devrait être proche de 100Mo.
# Edition des données de cartographie avec MapFabric
### Démarrage de MapFabric
Dans un premier temps,
- créer un dossier sur le bureau avec le nom suivant : VotreNom-MapFabric
- déposer le fichier `log.odo` dans le dossier `VotreNom-MapFabric`
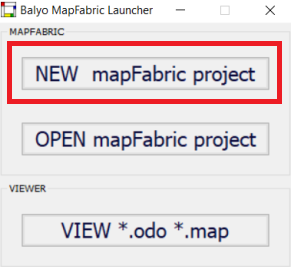
On lance l’exécutable `MapFabric.exe` fourni sur Moodle.
1. On clique sur New Map Fabric project
2. Sélectionner comme emplacement de projet le dossier `VotreNom-MapFabric` qui se trouve sur le Bureau.
L’interface du logiciel peut se décomposer suivant 5 zones :
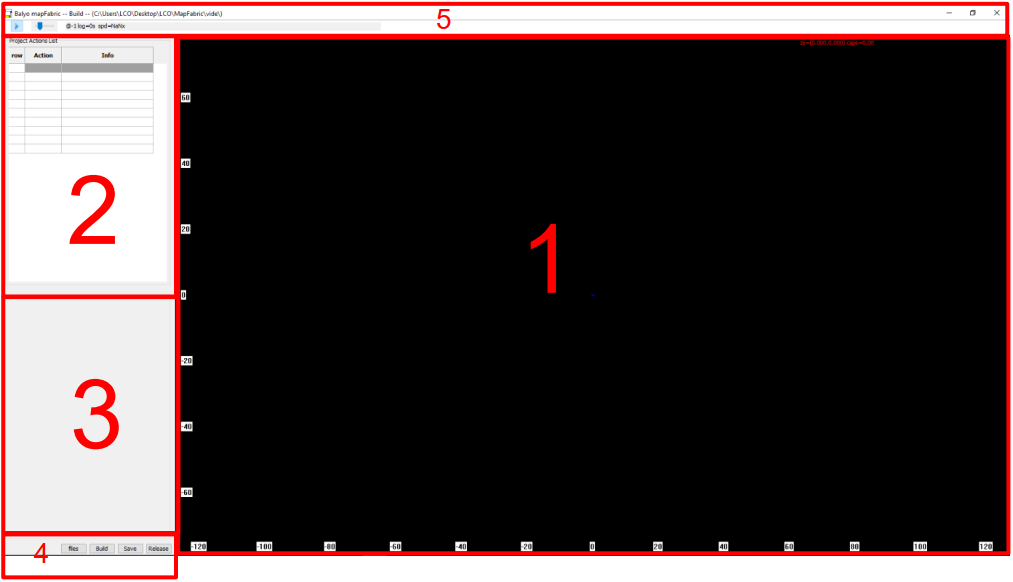1. Zone de travail : C’est la zone dans laquelle s’affiche la carte en cours de création ;
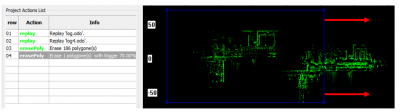
2. Project Action List : tableau dans lequel nous ajoutons les actions à exécuter sur la carte ;
3. Zone de paramétrage : Zone dans laquelle s’affiche les paramètres des actions de la project action list ;
4. Bandeau bouton : Zone des boutons de commande du projet ;
5. Bandeau de lecture : Affiche les informations durant la lecture du log.
Pour importer le log, il faut cliquer sur le bouton `files` en bas à gauche (zone 4)
La fenêtre de gestion des fichiers de log va s’ouvrir.
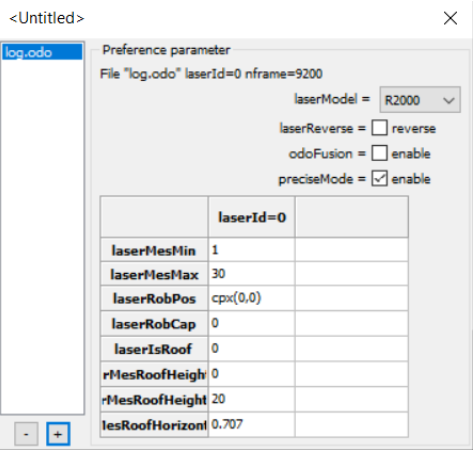- Dans cette fenêtre cliquer sur le bouton `+` pour sélectionner le fichier log.odo à ajouter au projet.
- Afin de réaliser un import correct pour le projet, les options doivent être réglées comme sur l’image ci-dessus. (`laserModel = R2000` et cocher l’option **preciseMode** en **\[v\] enable**)
- Une fois le fichier importé et les paramètres réglés, il suffit de fermer cette fenêtre.
### Replay du log
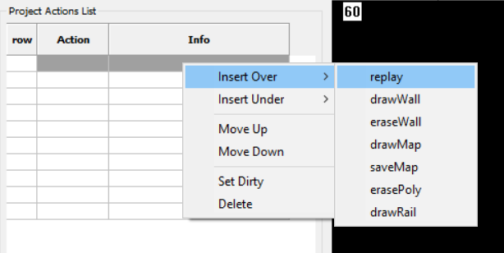
Maintenant que le projet est créé et que le log est importé dans le projet, l’étape suivante consiste à demander à MapFabric de relire le fichier et de créer la carte. Pour cela une action replay doit être ajouté à la « Project Action List ».
- Placer son curseur dans la Project Actions List et faire un « clic droit ».
Cette action replay possède les paramètres suivants
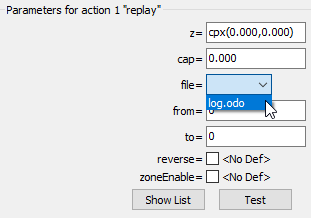- `z =` : correspond aux coordonnées du robot en début de log. Pour décaler la carte dans un sens, il est possible de rentrer un offset de départ du log. Dans le cas d’un log unique (installation simple) ce paramètre peut rester à zéro
- `Cap =` : Ce paramètre permet de décaler l’orientation du robot en début de log. Cela permet de faire tourner la carte autour du point de départ du robot. Si en créant le log le robot n’était pas aligné à un mur, cela permet de corriger cette erreur.
- `File =` : Ce paramètre est le log à rejouer. Il suffit de sélectionner le fichier ajouté plus tôt
- `From =` : Ceci représente le numéro de frame de départ du log. Ceci permet de couper un bout au début du log si le robot est resté allumé avant le début de l’enregistrement
- `To =` : Ceci représente le numéro de frame de fin du log (laisser 0 pour lire le log en entier). Ceci permet de couper un bout à la fin du log.
- Les deux derniers paramètres doivent rester décochés.
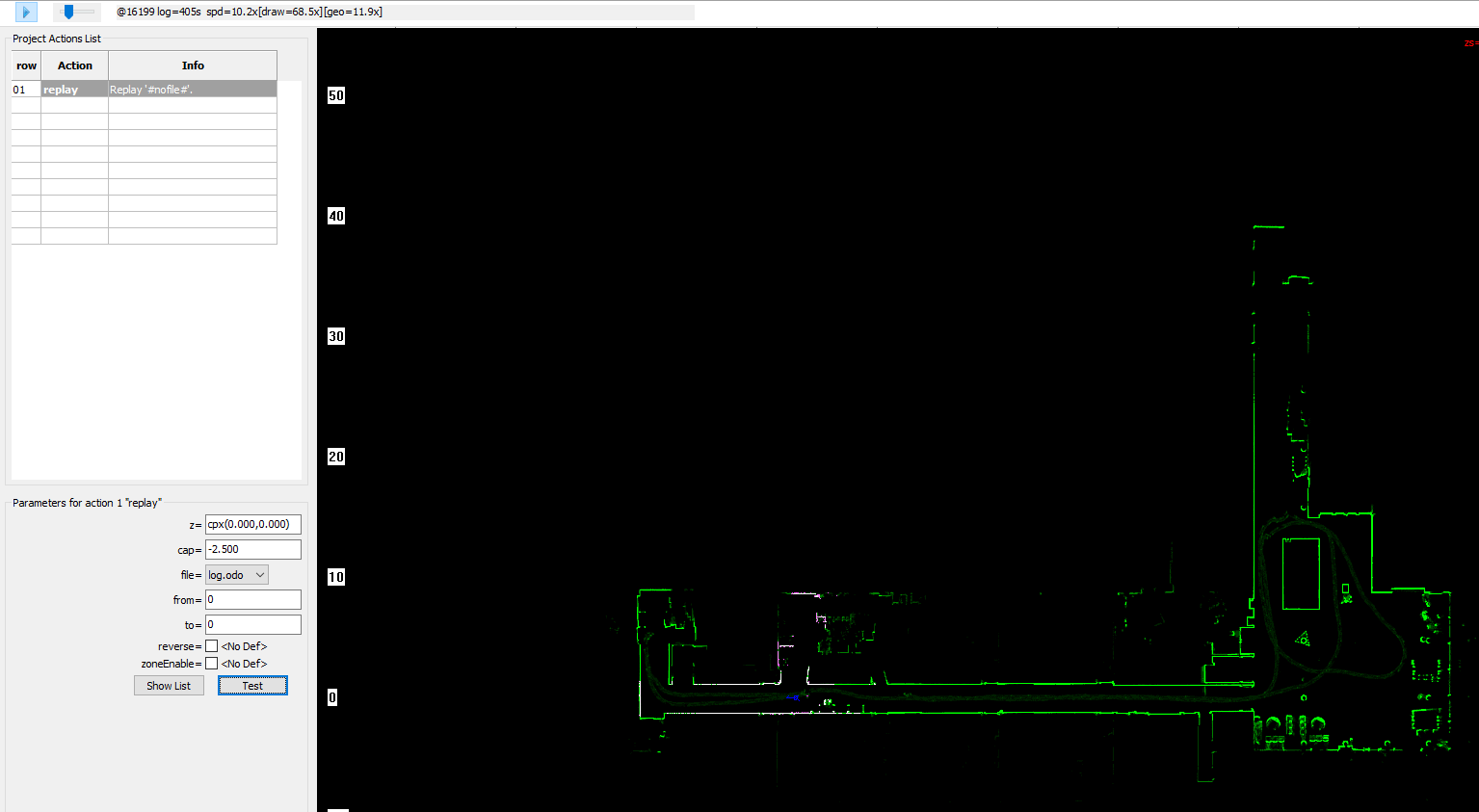
La gestion du cap se fait selon le sens trigonométrique. Une petite adaptation (entre -3 et +3) peut être nécessaire pour avoir les murs bien en parallèle. On peut également faire des rotations de 90° ou 180° en fonction de comment vous avez déplacé le robot pour faire la cartographie.
- Cliquer sur le bouton `Test`
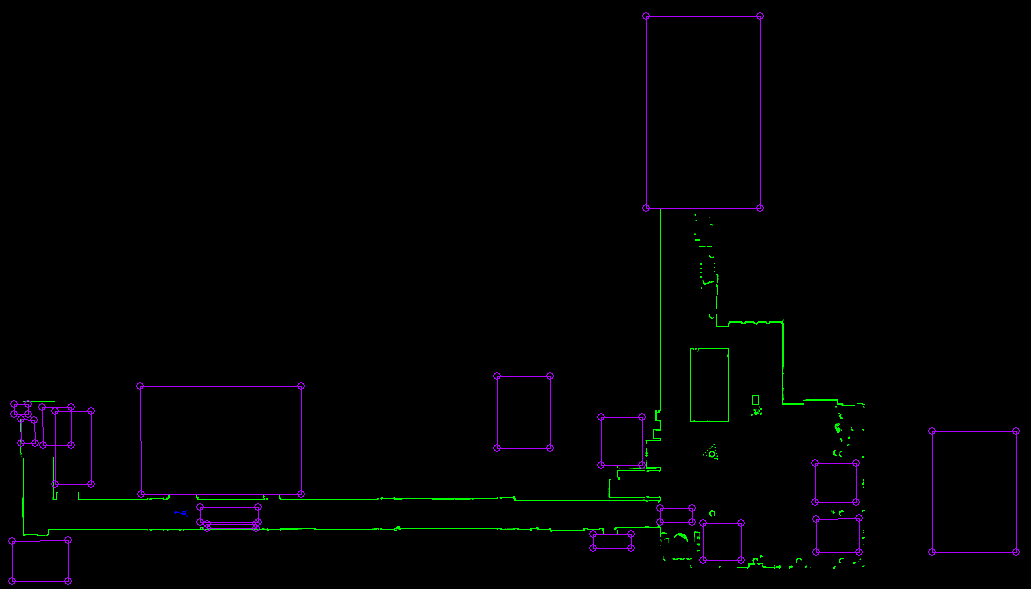
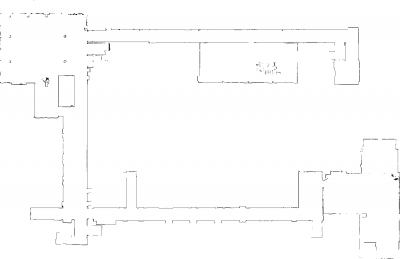
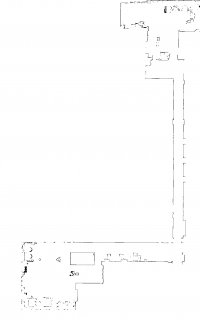
- On reconnait la forme du bâtiment B de l’IUT. On remarque également que les murs ne sont pas droits car le Sherpa n’était pas exactement parallèle au mur quand la cartographie a été faite.
- Un décalage de -2.500 au niveau du cap permet d’améliorer le résultat. (si on tourne dans le sens horaire il faut mettre un signe `-`)
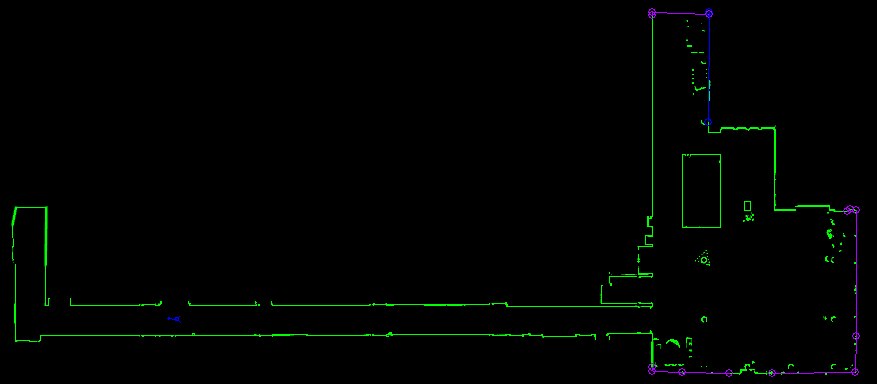
- Nettoyer grossièrement la carte avec ErasePoly (trig=70%) en entourant toute la cartographie avec un polygone.
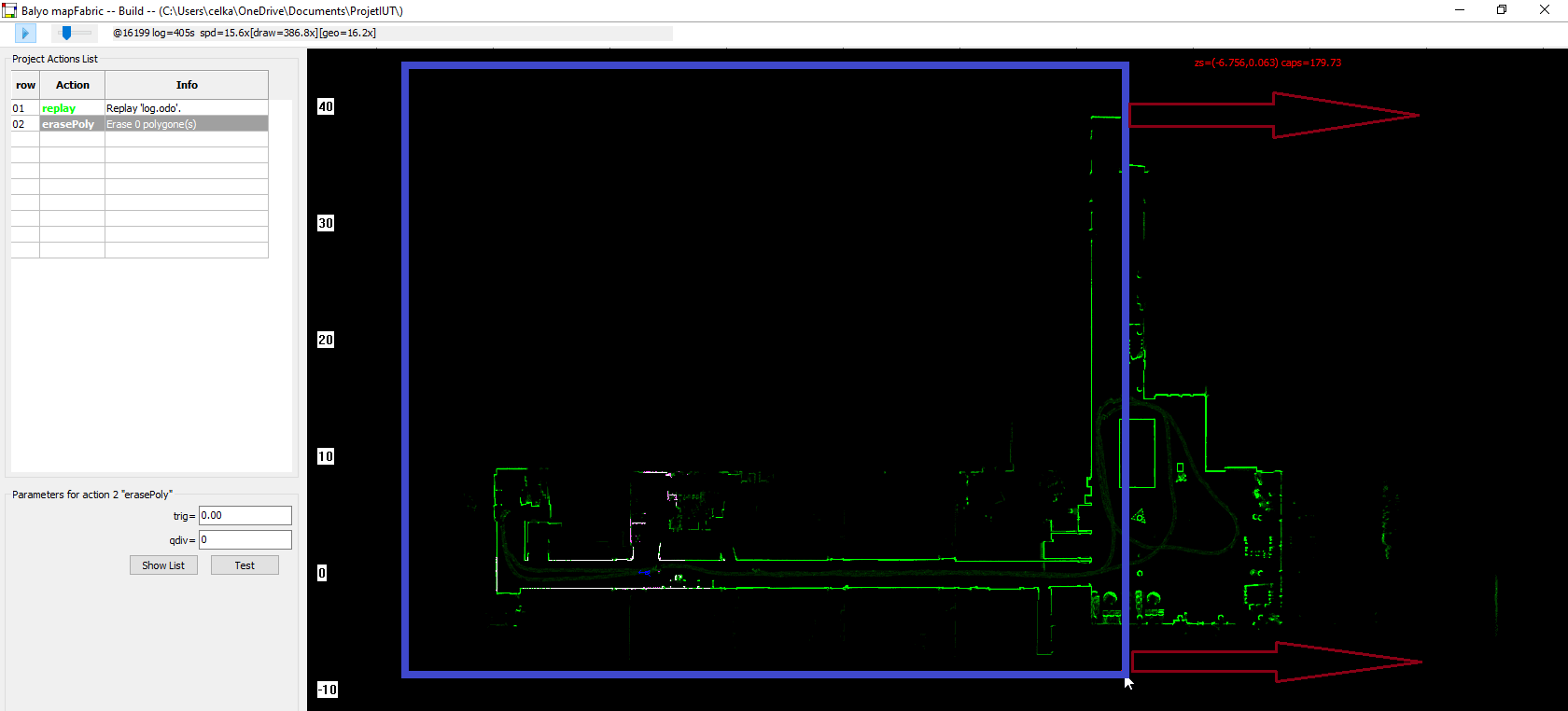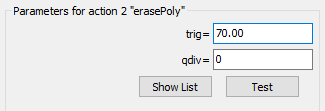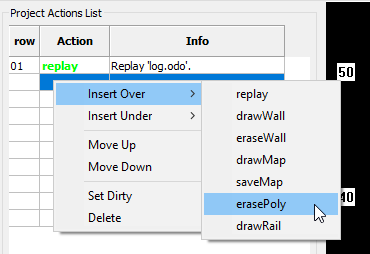- Nettoyer finement la carte en plaçant des polygones à des endroits spécifiques sur la carte à l’aide de l’outil ErasePoly (trig=0%)
Eliminer tous les points parasites de la cartographie car ils représentent un obstacle pour le Sherpa qui ne pourra pas circuler à travers ce point. Quelques points non effacés dans le couloir peuvent empêcher le robot de circuler !
- Ajouter des murs virtuels à la place des vitres avec l’outil drawWall
- Et voilà :
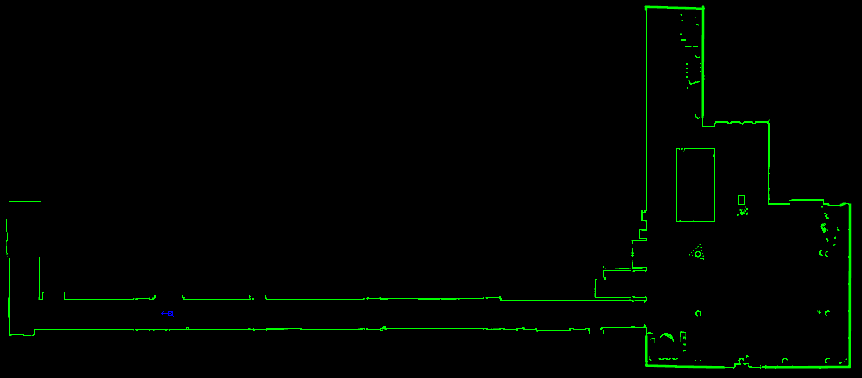- Créer la version finale (Release) en appuyant sur le bouton `Release`
## Import de la map sur le Sherpa
On retourne sur le serveur web de configuration du Sherpa :
On clique sur `Map Import` et l’on upload le fichier map.geo que nous venons de générer avec Map Fabric. Ce fichier se trouve dans le répertoire Release. Avant de le charger, on vérifie que la date et l’heure de création du fichier est cohérente avec le moment où l’on a crée la release.
La cloche risque de clignoter pour demander de mettre à jour le Fleet Manager et le Robot, mais nous allons d’abord créer une route, suivi d’une mission avant de mettre à jour le Fleet et le robot en “suivant les cloches” ;)
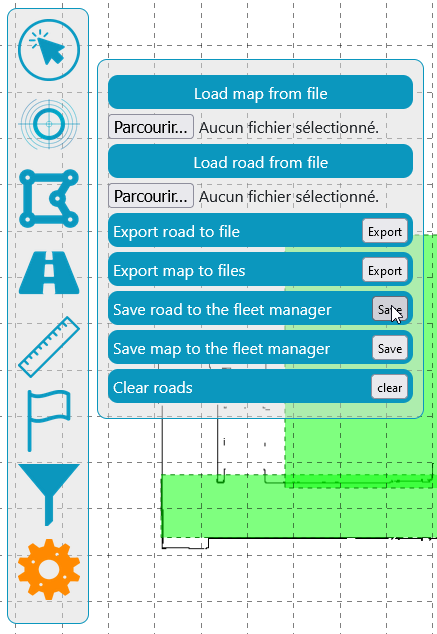
### Création des routes et règles de circulation
On clique sur :
Quand on démarre un nouveau projet, faire `Clear roads` pour supprimer les routes d’un projet précédent.
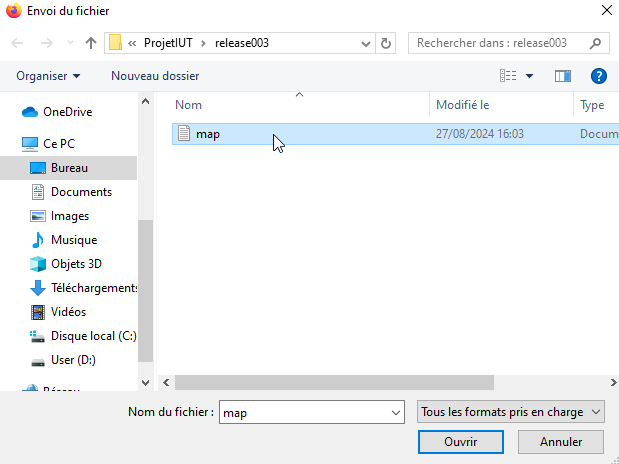
On fait ensuite `Load Map` from file
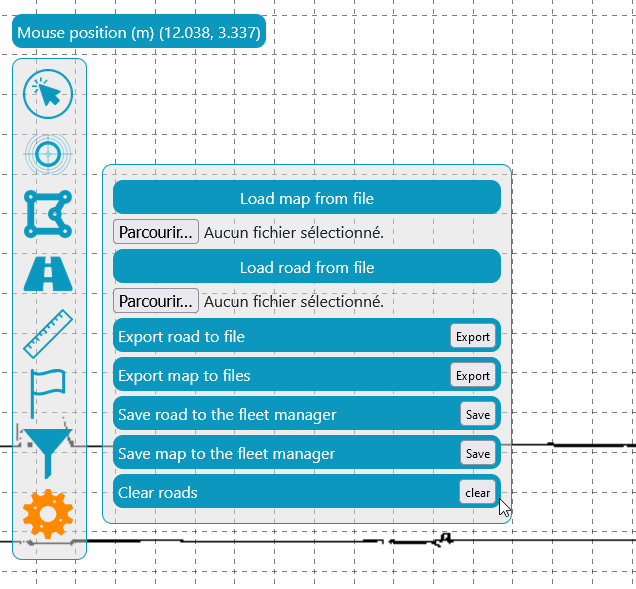et l’on sélectionne le fichier `map.txt` généré dans le dossier Release de Map Fabric.
On fait :
- Save map to the fleet manager
On peut faire l’update du fleet-manager et du robot, en suivant les “cloches” :
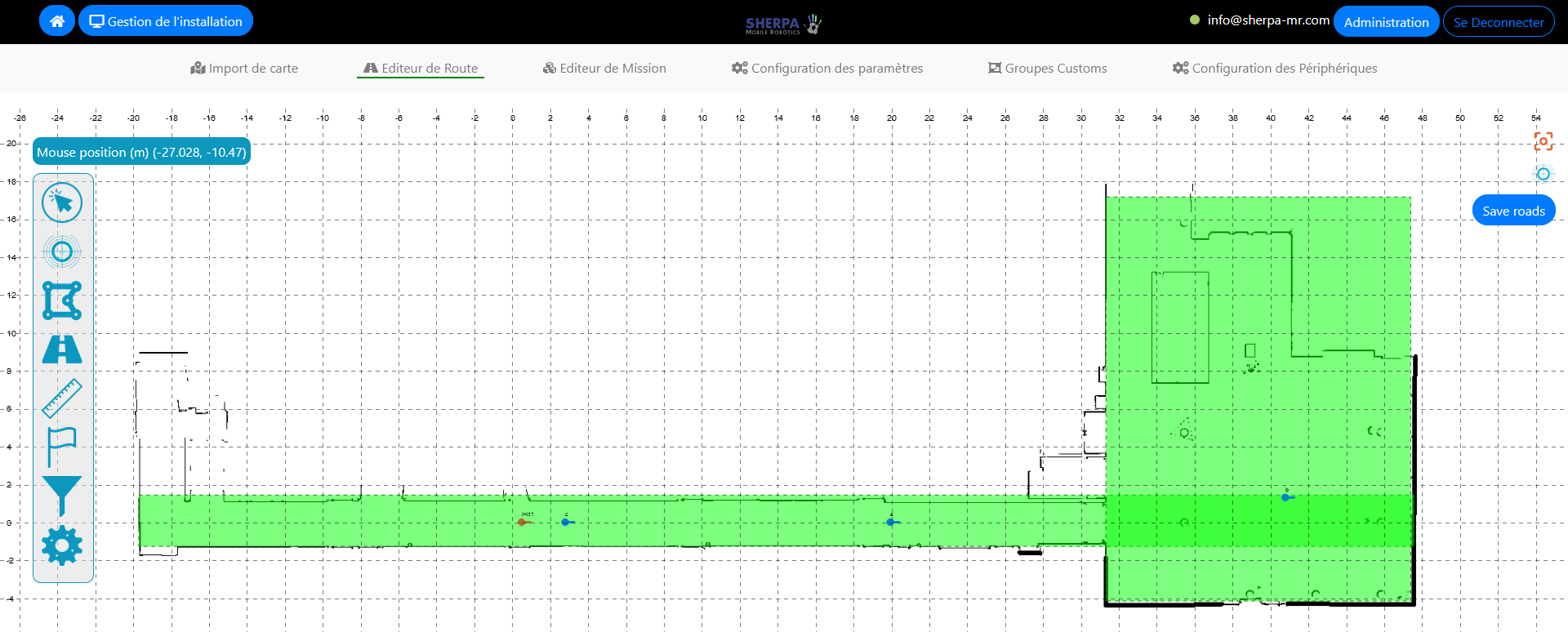
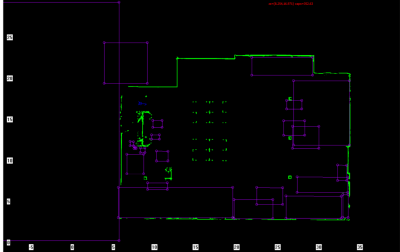
Nous pouvons maintenant placer les routes sur la carte. Les routes correspondent aux zones où le robot a le droit de circuler.
[](https://innovation.iha.unistra.fr/uploads/images/gallery/2025-03/zTnimage.png)
Quelques règles :
- il est important **que les routes vertes se superposent**, n’hésitez pas à recouvrir les différentes zones pour que le robot puisse passer.
- on peut également recouvrir les murs, les sécurités du robot vont l’empêcher de “cogner” mais comme celà, le robot peut profiter de l’ensemble de l’espace disponible dans le couloir par exemple.
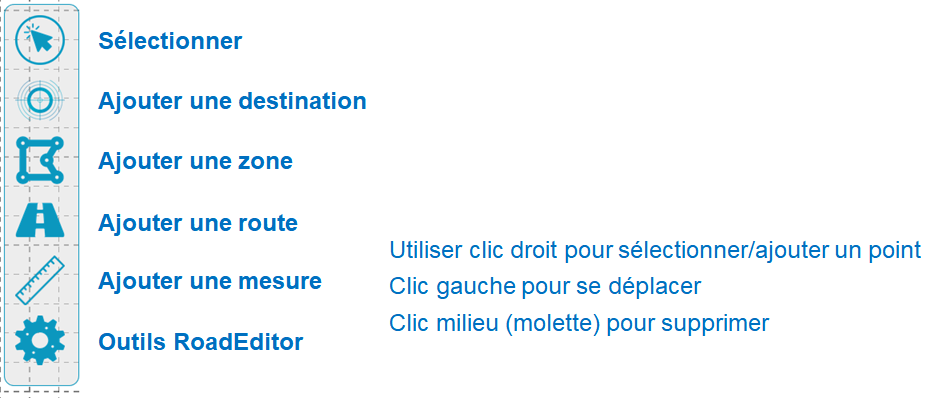
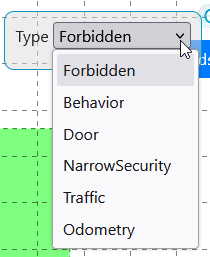
Nous pouvons également définir des zones comportementales avec l’icône :
- Forbidden : pour les zones interdites au robot (en rouge)
- Behavior : zone comportementale avec vitesse réduite par exemple
- … : la documentation technique du robot précise ces différents types de zones.
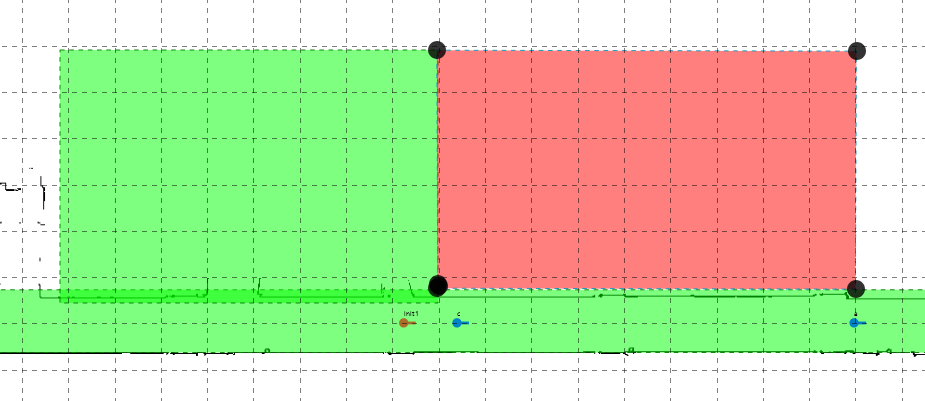
Dans cet exemple, une zone “Forbidden” (rouge) a été placée :
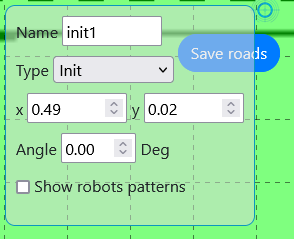
On place maintenant les points. Pour que le Sherpa puisse s’orienter et s’initialiser dans la carte, il faut lui placer un point d’initialisation `init1` sur la cartographie. Il faudra placer physiquement le robot sur ce point pour lancer la procédure d’initialisation.
Choisir le point init1 à proximité d’un repère pour faciliter le positionnement du robot.
Placer le point `init1` de façon à ce que le LIDAR voit deux murs assez longs, droits et qui forment un angle par exemple perpendiculaires. Cela facilitera la vie de l'algorithme de recalage.
Si l'environnement du robot à sont point `init1` présente des symétries, l'algorithme n'arrivera pas forcément à trouver la bonne position et orientation, car elles peuvent être multiples
Avec le menu, “Création de destination”, on crée un point `init1` à l’intersection du milieu du couloir et le milieu d’une porte de salle de TP.
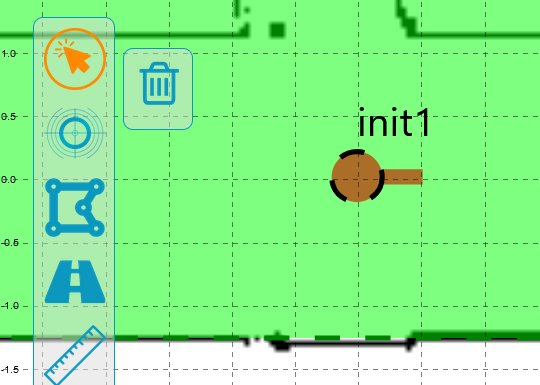La petite barre horizontale du point indique l’orientation (la flèche) du robot. Pour le point d’`init1`, il est nécessaire de lui attribuer le type init et de lui donner le nom `init1`.
L’icône avec le curseur permet d’éditer les caractéristiques du point.
**Important :** On choisit le type Init pour ce point d’initialisation.
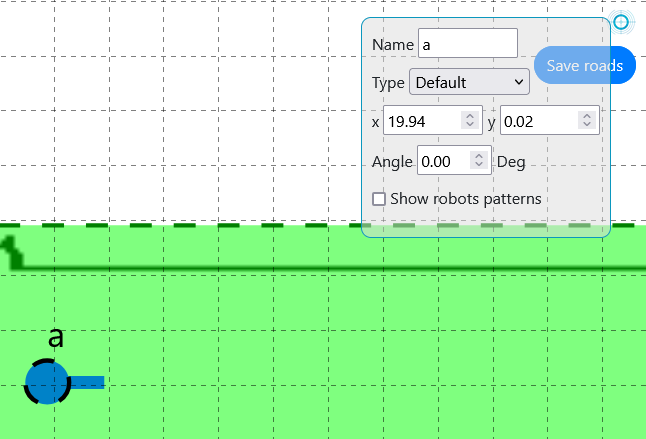
On peut maintenant placer 3 autres points: a, b, c de type “Default” sur la carte que l’on va utiliser comme points à atteindre pour la mission que nous allons créer.
Avant de quitter l’édition de Route, il faut penser à faire :
- Save road to the fleet manager
- Save map to the fleet manager
Le robot demandera certainement de faire un update du fleet Manager et du robot, il suffira de suivre les cloches pour effectuer ces deux opérations.
# Blocs de programmation avancée
### Docking grâce à la localisation d'un Amer
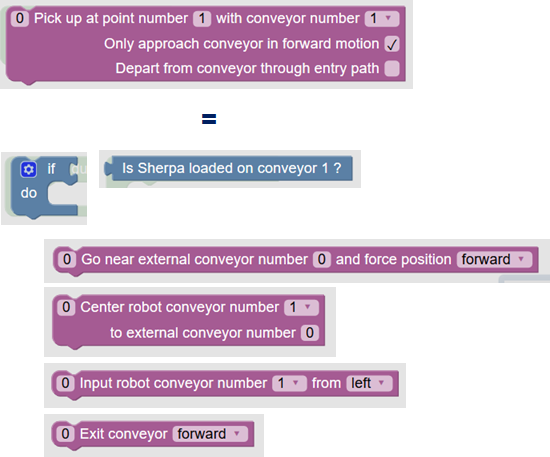
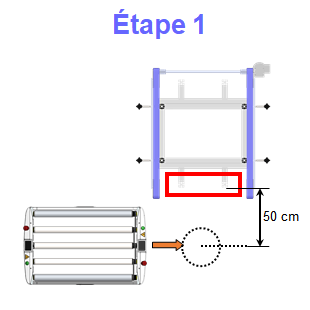
- Le block de docking permet au robot de se positionner avec une précision de l'ordre du centimètre par rapport à un convoyeur. Voici en quoi consiste un bloc de Pick Up
[](https://innovation.iha.unistra.fr/uploads/images/gallery/2025-03/tyOimage.png)
- Placer le point de mission à 50cm devant les barres verticales de l'Amer
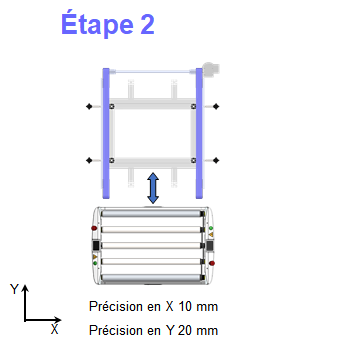
- Le robot effectue une trajectoire d'approche
[](https://innovation.iha.unistra.fr/uploads/images/gallery/2025-03/Yt5image.png)
- Puis se docke au convoyeur avec une précision de l'ordre du centimètre
[](https://innovation.iha.unistra.fr/uploads/images/gallery/2025-03/vv4image.png)
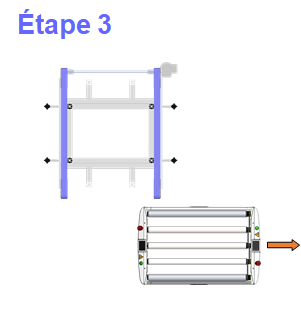
- Il repart soit en avant soit en arrière en fonction de l'option cochée
[](https://innovation.iha.unistra.fr/uploads/images/gallery/2025-03/YUqimage.png)
# Cartographies et routes prédéfinies
### Cartographie RDC bât. B :
- Lieux : Hall B, couloirs GEII+QLIO, Smart-Prod ( AFB), Flextory
- Cartographie (.geo & .txt) : [Carte complète IUT](https://intra.iha.unistra.fr/lib/exe/fetch.php?media=innovation:smartprod:sherpa:carte_rdc.7z)
[](https://innovation.iha.unistra.fr/uploads/images/gallery/2023-03/carte-complete.png)
### Cartographie réduite GEII :
- Lieux : Hall B, couloirs GEII+QLIO, Smart-Prod ( AFB)
- Cartographie (.geo & .txt) : [Carte GEII](https://intra.iha.unistra.fr/lib/exe/fetch.php?media=innovation:smartprod:sherpa:carte_geii.7z)
### Cartographie réduite QLIO :
- Lieux : Hall B,QLIO, Flextory
- Cartographie (.geo & .txt) : [Carte QLIO](https://intra.iha.unistra.fr/lib/exe/fetch.php?media=innovation:smartprod:sherpa:carte_qlio.7z)
[](https://innovation.iha.unistra.fr/uploads/images/gallery/2023-03/mapqlio.png)
## Routes
#### Avec la cartographie RDC
-
Mission Hall B : [ Route complète RDC](https://intra.iha.unistra.fr/lib/exe/fetch.php?media=innovation:smartprod:sherpa:routerdc.7z "innovation:smartprod:sherpa:routerdc.7z (1.9 KB)")
# Maintenance
### Nettoyage des capteurs
# Création d'une carte - Logiciel MapFabric - OLD
# Description
La création de la carte est basée sur un enregistrement des données du LIDAR du SHERPA.
Afin de de créer la carte, il faut déplacer le robot dans la zone à cartographier.
L’enregistrement est un log circulaire, cela signifie que le log ne peut pas dépasser 100Mo.
Si le log venait à dépasser cette taille, les données du début seraient perdues.
100Mo de log correspondent à environ 10 minutes de parcours.
Pour réaliser des cartes plus grandes ou des corrections, il faut fusionner plusieurs logs (voir la documentation du SHERPA).
## Connexion au SHERPA
# Création de la carte avec MapFabric
-
Parcourir la zone à cartographier avec le Sherpa **en mode Suiveur**. en suivant les conseils suivants pour obtenir la meilleure carte possible :
- Passer deux fois dans chaque allée en venant de deux directions différentes.
- Essayer de revenir fréquemment à une position déjà connue du robot afin d’ajouter seulement de petites boucles.
- Marcher lentement en particulier devant les positions où le robot doit être précis.
- Dans le cas de poteaux de docking, faire en sorte que le robot voit les poteaux depuis toutes les directions.
- Si un objet « mobile » est devant un mur essayer de passer derrière l’objet pour que le robot voit le mur.
- Le log continu même en cas d’arrêt d’urgence ou de déblocage des freins donc si une position n’est pas atteignable en follow-me, débloquer les freins et pousser le robot jusqu’à la position désirée.
L’orientation de la carte dépendra de la position du robot au début du log.
Nous conseillons donc de placer le robot parallèlement à un mur afin de faciliter la création de la carte pour avoir une carte “droite” à l’écran.
Une fois le parcours d’enregistrement terminé, exporter le log via la **ToolSuite** du robot :
1. Se connecter au réseau wifi du SHERPA
- Se connecter au Wifi ***SherpaB20*** ou ***SherpaB21*** ou ***SherpaB148***.
- Password Wifi : **BalyoNorcan**
2. Se connecter à l'interface web du Sherpa :
- Se connecter à l'aider d'un navigateur sur l'adresse : **[https://192.168.2.1:8000](https://192.168.2.1:8000 "https://192.168.2.1:8000")**
- Identifiant : [**info@sherpa-mr.com**](mailto:info@sherpa-mr.com)
- Password : **1234** ou **coudert**
3. Récupérer le fichier log sur le Sherpa :
- Importer les points du Sherpa dans l'application **Mapfabric** (fichier Log du sherpa) :
Rejouer la carte avec l'outil **Replay** et nettoyer grossièrement la carte avec l'outil **ErasePoly** (trig = 70%) en entourant toute la cartographie avec un polygone :
[](https://innovation.iha.unistra.fr/uploads/images/gallery/2023-03/nettoyage70.png)
- Nettoyer finement la carte en plaçant des polygones à des endroits spécifiques sur la carte à l'aide de l'outil **ErasePoly** (trig = 0%):
[](https://innovation.iha.unistra.fr/uploads/images/gallery/2023-03/nettoyage100.png)
-
Ajouter des murs virtuels à la place des vitres avec l'outil **drawWall**.
-
Création finale de la carte en appuyant sur le bouton **Release** :