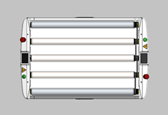
| **Signalétique** | **Situation** | **Description** |
| Initialisation | ||
| [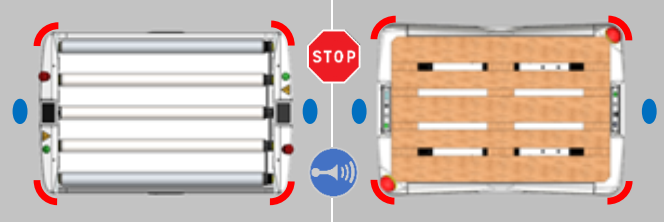](https://innovation.iha.unistra.fr/uploads/images/gallery/2025-03/C7uimage.png) | en cours d’initialisation | 4 phares rouges et blue spots allumés 5 tons à la fin de l’initialisation |
| [](https://innovation.iha.unistra.fr/uploads/images/gallery/2025-03/aX8image.png)[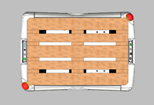](https://innovation.iha.unistra.fr/uploads/images/gallery/2025-03/S0nimage.png) | roues débloquées | Clignotement simultané des 4 phares en blanc [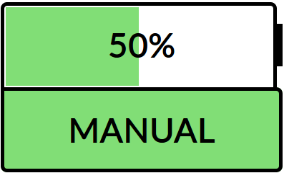](https://innovation.iha.unistra.fr/uploads/images/gallery/2025-03/gyiimage.png) |
| [](https://innovation.iha.unistra.fr/uploads/images/gallery/2025-03/l4bimage.png)[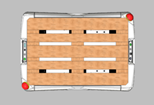](https://innovation.iha.unistra.fr/uploads/images/gallery/2025-03/EYXimage.png) | roues bloquées | 4 phares blanc fixes [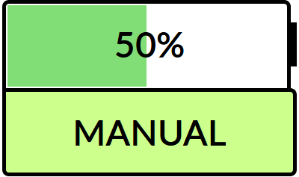](https://innovation.iha.unistra.fr/uploads/images/gallery/2025-03/7Dcimage.png) |
| Mode Follow-me | ||
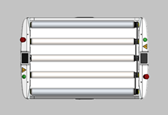
| [](https://innovation.iha.unistra.fr/uploads/images/gallery/2025-03/lzJimage.png) | stand by initialisé | Prêt à être utilisé (mode Follow me) 4 phares fixes blancs [](https://innovation.iha.unistra.fr/uploads/images/gallery/2025-03/tWeimage.png) |
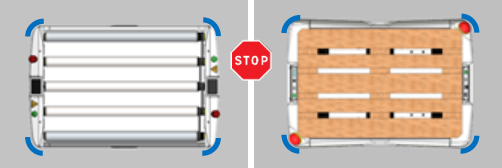
| [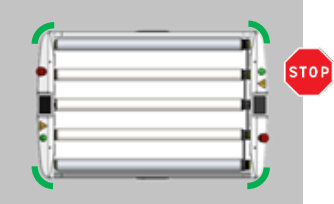](https://innovation.iha.unistra.fr/uploads/images/gallery/2025-03/CXFimage.png) | en mode Follow Me à l’arrêt | Opérateur détecté 4 phares fixes verts [](https://innovation.iha.unistra.fr/uploads/images/gallery/2025-03/yUFimage.png) |
| [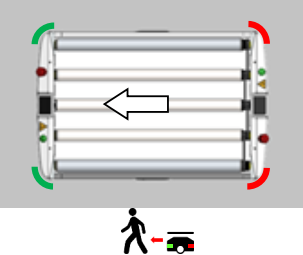](https://innovation.iha.unistra.fr/uploads/images/gallery/2025-03/yztimage.png) | en mode Follow me | Opérateur suivi 2 phares avant verts, 2 phares arrière rouges [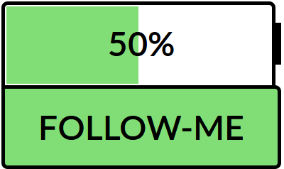](https://innovation.iha.unistra.fr/uploads/images/gallery/2025-03/jCkimage.png) |
| Mode Autonome | ||
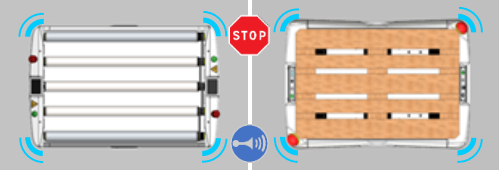
| [](https://innovation.iha.unistra.fr/uploads/images/gallery/2025-03/IuWimage.png) | en mode Autonome à l’arrêt | Prêt à être utilisé (mode Autonome) 4 phares bleus fixes [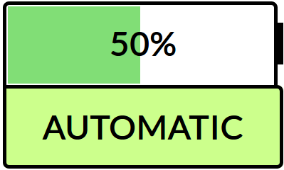](https://innovation.iha.unistra.fr/uploads/images/gallery/2025-03/gXoimage.png) |
| [](https://innovation.iha.unistra.fr/uploads/images/gallery/2025-03/uolimage.png) | en pause mode autonome | Clignotement bleu simultané des 4 phares [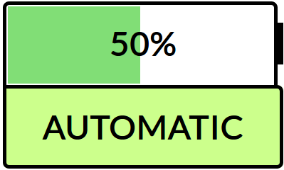](https://innovation.iha.unistra.fr/uploads/images/gallery/2025-03/PR1image.png) |
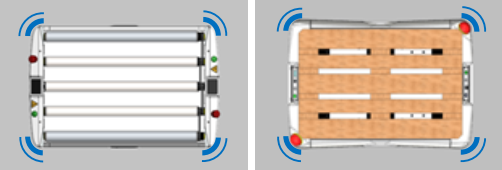
| [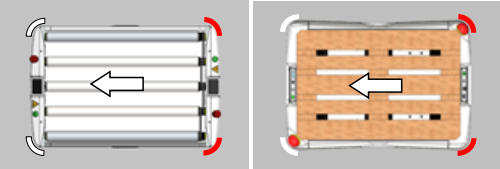](https://innovation.iha.unistra.fr/uploads/images/gallery/2025-03/hCvimage.png) | en déplacement | 2 phares avant blancs, 2 phares arrière rouges [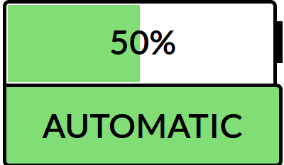](https://innovation.iha.unistra.fr/uploads/images/gallery/2025-03/Pqqimage.png) |
| [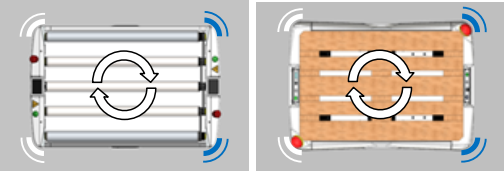](https://innovation.iha.unistra.fr/uploads/images/gallery/2025-03/oSRimage.png) | en mission | (Sans avancer / en rotation) Clignotement 2 phares avant blancs, 2 phares arrière bleus [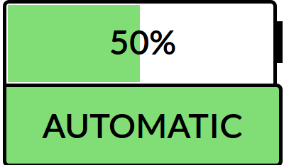](https://innovation.iha.unistra.fr/uploads/images/gallery/2025-03/70aimage.png) |
| [](https://innovation.iha.unistra.fr/uploads/images/gallery/2025-03/1moimage.png) | Perte de localisation en mode auto | Clignotement cyan circulaire des 4 phares Action : Relocaliser le Sherpa à son point de référence [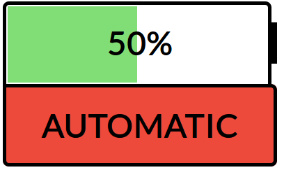](https://innovation.iha.unistra.fr/uploads/images/gallery/2025-03/LTLimage.png) |
| **Signalétique** | **Situation** | **Description** |
| Initialisation | ||
| [](https://innovation.iha.unistra.fr/uploads/images/gallery/2025-03/1moimage.png) | Perte de localisation en mode auto | Clignotement cyan circulaire des 4 phares Action : Relocaliser le Sherpa à son point de référence [](https://innovation.iha.unistra.fr/uploads/images/gallery/2025-03/LTLimage.png) |
| [](https://innovation.iha.unistra.fr/uploads/images/gallery/2025-03/ovHimage.png) | Détection d’un objet dans le périmètre du robot | Clignotement jaune simultané Action : Retirer l’obstacle [](https://innovation.iha.unistra.fr/uploads/images/gallery/2025-03/LTLimage.png) |
| [](https://innovation.iha.unistra.fr/uploads/images/gallery/2025-03/ovHimage.png) | Détection d’un obstacle à l’avant que le Sherpa ne parvient pas à contourner | 4 phares jaunes fixes Action : Retirer l’obstacle [](https://innovation.iha.unistra.fr/uploads/images/gallery/2025-03/LTLimage.png) |
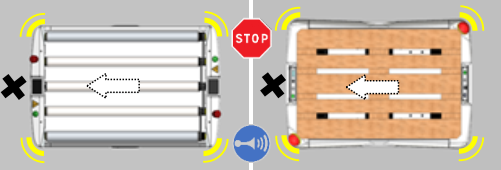
| [](https://innovation.iha.unistra.fr/uploads/images/gallery/2025-03/dGLimage.png) | Batterie sous le seuil d'alerte ou de fonctionnement | Clignotement violet avant puis arrière Action : Remplacer/ charger la batterie [](https://innovation.iha.unistra.fr/uploads/images/gallery/2025-03/gcsimage.png) |
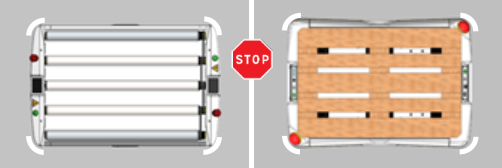
| [](https://innovation.iha.unistra.fr/uploads/images/gallery/2025-03/du0image.png) | Arrêt de sécurité | Clignotement rouge simultané Action : Supprimer la cause Arrêt d’urgence enclenché Bord sensible activé Détection capteurs bas [](https://innovation.iha.unistra.fr/uploads/images/gallery/2025-03/LTLimage.png) |
| N° de la tâche | Description de la tâche | Références/Photos |
| 1 | Allumer le Sherpa en appuyant sur le bouton Power. - Premier appui : le bouton descend en position **intermédiaire** et l’AMR lance son démarrage - Second appui : le bouton remonte en position **haute** et l’AMR lance sa séquence d’extinction. | [](https://innovation.iha.unistra.fr/uploads/images/gallery/2023-10/MnHimage.png) |
| 2 | Attendre quelque dizaines de secondes afin que le sherpa s’allume correctement | [](https://innovation.iha.unistra.fr/uploads/images/gallery/2023-10/VEHimage.png) |
| 3 | Lorsque le sherpa a fini de se lancer une image apparaît sur l’écran. Attendre quelques dizaines de secondes ou appuyer sur actualiser et l’image ci-contre apparaît. | [](https://innovation.iha.unistra.fr/uploads/images/gallery/2023-10/avMimage.png) |
| 4 | Pour éteindre le Sherpa, appuyer sur le bouton Power |
Il faut rester attentif à la connexion réseau du PC, il peut y avoir des bascules entre le wifi de l’AMR et le wifi Eduroam, notamment lors des phases de redémarrage du Sherpa.
#### Connexion à l’interface A l’aide d’un navigateur on va se connecter à l’adresse [https://192.168.2.1:8000](https://192.168.2.1:8000) qui correspond au serveur web de configuration de l’AMR. Il est fort probable que votre navigateur indique qu’il y ait un risque probable de sécurité. Pour Firefox, il faudra cliquer sur `Avancé` et `Accepter le risque et poursuivre`.| N° de la tâche | Description de la tâche | Références/Photos |
| 1 | Lorsque vous avez finis d’utiliser le sherpa, vous devez mettre en charge le sherpa s’il est en dessous de 50%. | [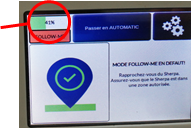](https://innovation.iha.unistra.fr/uploads/images/gallery/2023-10/AFMimage.png) |
| 2 | Vous trouverez le chargeur en haut dans l’armoire. Pour pouvoir ouvrir l’armoire, il vous faut une clé qui est disponible au département QLIO. | [](https://innovation.iha.unistra.fr/uploads/images/gallery/2023-10/4xOimage.png) [](https://innovation.iha.unistra.fr/uploads/images/gallery/2023-10/CnNimage.png) |
| 3 | Vous devez sortir la batterie du sherpa. Pour cela, vous prenez la batterie délicatement par la poignée. | [](https://innovation.iha.unistra.fr/uploads/images/gallery/2023-10/HhYimage.png) |
| 4 | Une fois le chargeur et la batterie sortie, vous devez les brancher. | [](https://innovation.iha.unistra.fr/uploads/images/gallery/2023-10/FQVimage.png) |
| 5 | Une fois la batterie rechargée, vous devrez remettre la batterie dans le sherpa et le chargeur dans l’armoire |
Il faut rester attentif à la connexion réseau du PC, il peut y avoir des bascules entre le wifi de l’AMR et le wifi Eduroam, notamment lors des phases de redémarrage du Sherpa.
#### Connexion à l’interface A l’aide d’un navigateur on va se connecter à l’adresse `https://192.168.2.1:8000` qui correspond au server web de configuration de l’AMR. Il est fort probable que votre navigateur indique qu’il y ait un risque probable de sécurité. Pour Firefox, il faudra cliquer sur `Avancé` et `Accepter le risque et poursuivre`.Les modifications du système impliquent une mise à jour du Fleet Manager (Il faut “suivre la cloche”)
| Position correcte | Position à éviter |
|---|---|
La gestion du cap se fait selon le sens trigonométrique. Une petite adaptation (entre -3 et +3) peut être nécessaire pour avoir les murs bien en parallèle. On peut également faire des rotations de 90° ou 180° en fonction de comment vous avez déplacé le robot pour faire la cartographie.
- Cliquer sur le bouton `Test`Eliminer tous les points parasites de la cartographie car ils représentent un obstacle pour le Sherpa qui ne pourra pas circuler à travers ce point. Quelques points non effacés dans le couloir peuvent empêcher le robot de circuler !
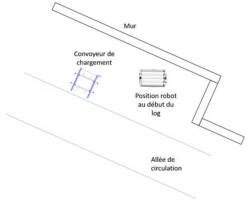
- Ajouter des murs virtuels à la place des vitres avec l’outil drawWallChoisir le point init1 à proximité d’un repère pour faciliter le positionnement du robot.
Placer le point `init1` de façon à ce que le LIDAR voit deux murs assez longs, droits et qui forment un angle par exemple perpendiculaires. Cela facilitera la vie de l'algorithme de recalage.
Si l'environnement du robot à sont point `init1` présente des symétries, l'algorithme n'arrivera pas forcément à trouver la bonne position et orientation, car elles peuvent être multiples
| [](https://innovation.iha.unistra.fr/uploads/images/gallery/2023-03/sherpa-carte-travers.jpg) | [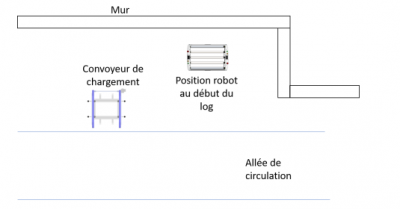](https://innovation.iha.unistra.fr/uploads/images/gallery/2023-03/debut-droit.png) |
| [](https://innovation.iha.unistra.fr/uploads/images/gallery/2023-03/replay-log.png) | [](https://innovation.iha.unistra.fr/uploads/images/gallery/2023-03/map-fabrique-import.png) |