# Création et lancement d'une mission simple
### Connexion à l'interface web du Sherpa
#### Connexion Wifi
L’identifiant Wifi des AMR Sherpa est **Sherpa\_B020** ou **Sherpa\_B148**.
Les mots de passe wifi sont :
- `QmFseW9Ob3JjYW4=` pour le Sherpa B020 (Convoyeur simple)
- `BalyoNorcan` pour le Sherpa B021/B020 (QLIO)
- `B148SherpaMR` pour le Sherpa B148 (Lève-Bac)
Il faut rester attentif à la connexion réseau du PC, il peut y avoir des bascules entre le wifi de l’AMR et le wifi Eduroam, notamment lors des phases de redémarrage du Sherpa.
#### Connexion à l’interface
A l’aide d’un navigateur on va se connecter à l’adresse [https://192.168.2.1:8000](https://192.168.2.1:8000) qui correspond au serveur web de configuration de l’AMR.
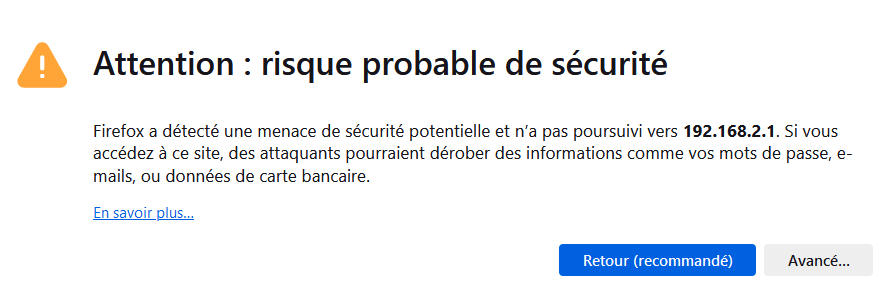
Il est fort probable que votre navigateur indique qu’il y ait un risque probable de sécurité. Pour Firefox, il faudra cliquer sur `Avancé` et `Accepter le risque et poursuivre`.
#### Login et Tool Suite
On arrive sur l’écran de login :
- Le login est
- Le mot de passe est `MTIzNA==` pour le Sherpa B148 et B020 (`Y291ZGVydA==`)
- `coudert` ou `1234` pour le Sherpa B021/B020 (QLIO)
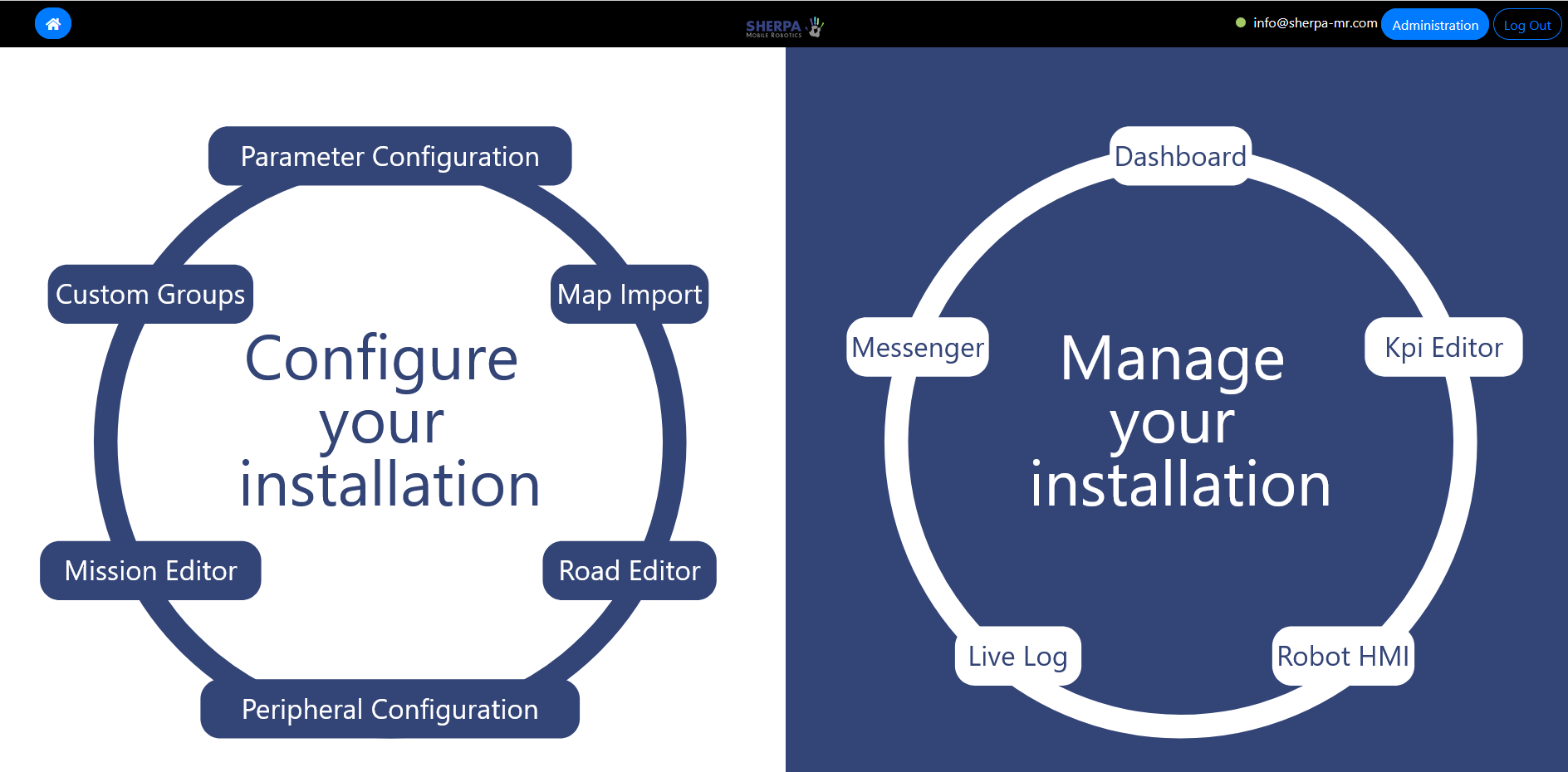
on arrive maintenant sur l’interface d’accueil de la Tool Suite :
### Edition de mission
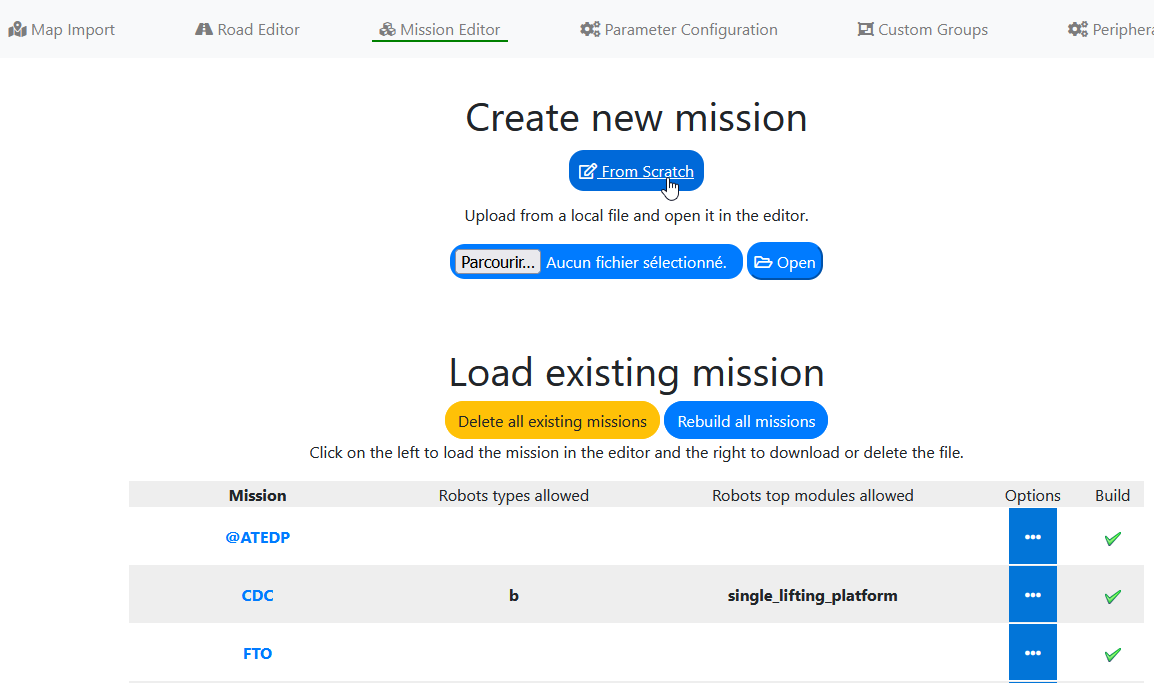
- Dans le menu “Mission editor”, créer une nouvelle mission `from scratch` :
- Donner un nom à cette mission (pas de caractères latin, pas d’espace, …)
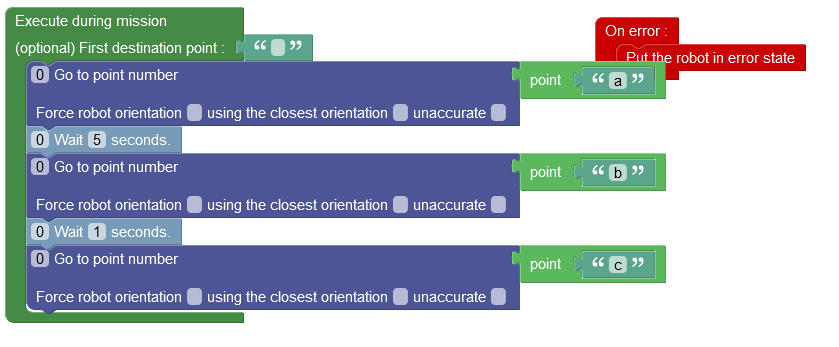
- Dans le menu common, on retrouve les fonctions de base pour les déplacements (go to point number), les temporisations (wait), …
- Nous allons développer un premier code simple de déplacement entre 3 points crées précédemment (a, b, c)
- On n’oublie pas de faire Save pour la mission !
- Pareil, le robot demandera la mise à jour du fleet manager et du robot, il suffira de suivre les cloches.