Club Robotique - Codey Rocky
- Phase 1 - Découverte des Codey Rocky et de Mblock
- Phase 2 - Approfondissement des fonctionnalités du Codey Rocky
- Phase 3 - Suivi de ligne avec Codey
Phase 1 - Découverte des Codey Rocky et de Mblock
Objectif général :
L'objectif de cette activité est d'initier les élèves à la robotique et à la programmation à travers l’utilisation du robot Codey Rocky et du logiciel mBlock. Ils apprendront à concevoir des algorithmes pour programmer le robot et effectuer différentes missions. À travers trois parcours progressifs, ils développeront des compétences en logique, en résolution de problèmes et en collaboration.
Compétences techniques :
-
Programmation visuelle avec mBlock : Les élèves apprendront à utiliser l'interface de blocs pour créer des programmes simples.
-
Manipulation du robot Codey Rocky : Savoir piloter le robot en utilisant ses moteurs pour réaliser des tâches spécifiques comme se déplacer.
-
Débogage : Les élèves seront amenés à tester leurs programmes et corriger les erreurs rencontrées. Cette compétence est cruciale pour améliorer leur compréhension de la logique algorithmique et de la robotique.
-
Algorithmes et logique : Les élèves devront structurer leurs programmes de façon à exécuter les tâches demandées de manière optimale, en tenant compte des défis présentés dans chaque parcours.
Savoir-être :
-
Persévérance : Les élèves devront faire preuve de persévérance pour tester, corriger et améliorer leurs programmes. Ils apprendront que les échecs font partie du processus d'apprentissage.
-
Collaboration : Les élèves seront amenés à travailler en groupes ou en binômes pour résoudre les problèmes ensemble, échanger des idées et trouver des solutions innovantes.
-
Patience : La création d’un programme, sa mise en œuvre, et son ajustement nécessitent du temps et de la concentration. Les élèves devront apprendre à être patients pour surmonter les défis.
-
Créativité : Ils auront l’opportunité de faire preuve de créativité, en particulier dans les tâches plus ouvertes, pour trouver des solutions innovantes et personnelles à des problèmes techniques.
Compétences transversales :
-
Résolution de problèmes : Chaque parcours présente des défis spécifiques. Les élèves devront analyser les problèmes rencontrés et ajuster leur programme pour les résoudre de manière autonome ou en groupe.
-
Pensée logique et algorithmique : Organiser des instructions dans un ordre cohérent pour atteindre les objectifs fixés, en tenant compte des conditions et des événements du parcours.
-
Gestion du temps et organisation : Les élèves devront apprendre à gérer leur temps pour tester et ajuster leurs programmes tout en respectant le cadre temporel de l'activité.
-
Autonomie et prise d’initiative : Bien que le travail collaboratif soit encouragé, les élèves devront également montrer de l’autonomie dans la recherche de solutions et dans la mise en œuvre de leurs programmes.
Déroulement des parcours
Les élèves devront accomplir trois parcours progressifs avec le robot Codey Rocky. Pour chaque parcours, ils devront suivre des étapes précises de programmation à l’aide du logiciel mBlock et adapter leur code en fonction des résultats observés sur le terrain. Voici comment organiser les trois parcours :
Parcours 1 :
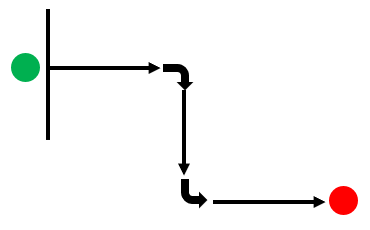
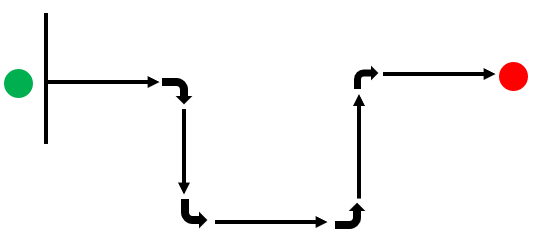
- Présentation du défi : Expliquer aux élèves le but du premier parcours, aller du point vert jusqu'au point rouge.
- Objectif du parcours : Les élèves ont pour but d'aller du point vert jusqu'au point rouge en utilisant que les blocs se trouvant dans les onglets "Action" et "Evénements".
- Étapes de la programmation :
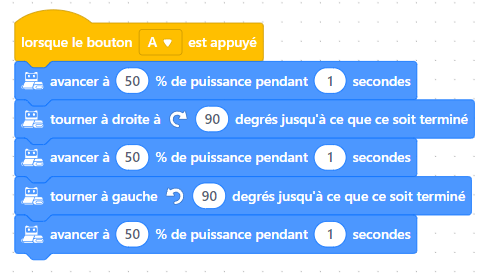
- Créer une séquence de base pour faire avancer le robot.
- Ajouter des commandes pour faire tourner le robot.
- Test et ajustements : Laisser les élèves tester leur programme et apporter des corrections si nécessaire.
- Discussion de groupe : Échanger sur les difficultés rencontrées et les solutions trouvées.
- Correction :

Parcours 2 :
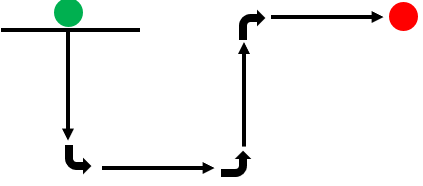
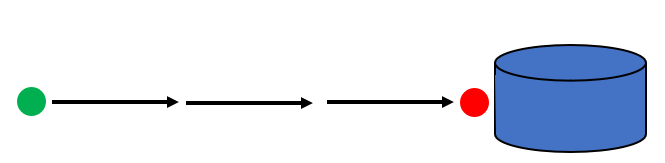
- Présentation du défi : Expliquer aux élèves le but du premier parcours, aller du point vert jusqu'au point rouge.
- Objectif du parcours : Les élèves ont pour but d'aller du point vert jusqu'au point rouge en utilisant que les blocs se trouvant dans les onglets "Action" et "Evénements".
- Étapes de la programmation :
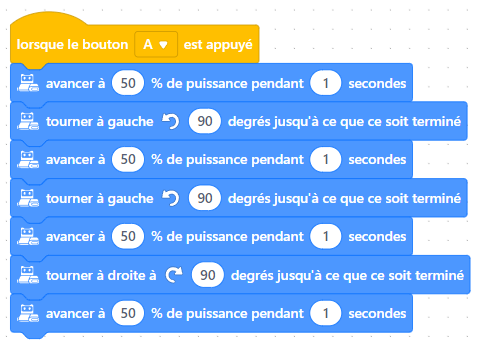
- Créer une séquence de base pour faire avancer le robot.
- Ajouter des commandes pour faire tourner le robot.
- Créer une séquence de base pour faire avancer le robot.
- Test et ajustements : Laisser les élèves tester leur programme et apporter des corrections si nécessaire.
- Bilan collectif : Échanger sur les difficultés rencontrées et les solutions trouvées.
- Correction :

Parcours 3 :
- Présentation du défi : Expliquer aux élèves le but du premier parcours, aller du point vert jusqu'au point rouge..
- Objectif du parcours : Les élèves ont pour but d'aller du point vert jusqu'au point rouge en utilisant que les blocs se trouvant dans les onglets "Action" et "Evénements".
- Étapes de la programmation :
- Créer une séquence de base pour faire avancer le robot.
- Ajouter des commandes pour faire tourner le robot.
- Créer une séquence de base pour faire avancer le robot.
- Test et ajustements : Laisser les élèves tester leur programme et apporter des corrections si nécessaire.
- Présentation finale : Échanger sur les difficultés rencontrées et les solutions trouvées.
- Correction :


Conclusion et retour d'expérience
À la fin de l'activité, chaque groupe fera un retour sur son expérience :
- Quelles étaient les difficultés rencontrées ?
- Quelles solutions ont été trouvées ?
- Quelles compétences ont été développées ?
L’enseignant pourra également faire une synthèse des compétences acquises et des progrès réalisés.
Phase 2 - Approfondissement des fonctionnalités du Codey Rocky
Objectif général :
L'objectif de cette activité est d'initier les élèves à la robotique et à la programmation à travers l’utilisation du robot Codey Rocky et du logiciel mBlock. Ils apprendront à concevoir des algorithmes pour programmer le robot et effectuer différentes missions. À travers deux parcours progressifs, ils développeront des compétences en logique, en résolution de problèmes et en collaboration.
Compétences techniques :
-
Programmation visuelle avec mBlock : Les élèves apprendront à utiliser l'interface de blocs pour créer des programmes simples, incluant des boucles de répétition et l’utilisation des capteurs du robot.
-
Manipulation du robot Codey Rocky : Savoir piloter le robot en utilisant ses moteurs pour réaliser des tâches spécifiques comme se déplacer, détecter des obstacles ou effectuer des boucles de mouvement.
-
Débogage : Les élèves seront amenés à tester leurs programmes et corriger les erreurs rencontrées. Cette compétence est essentielle pour améliorer leur compréhension de la logique algorithmique et de la robotique.
-
Algorithmes et logique : Les élèves devront structurer leurs programmes de manière optimale en intégrant des boucles de répétition ou en répondant à des conditions basées sur les capteurs.
Savoir-être :
-
Persévérance : Les élèves devront faire preuve de persévérance pour tester, corriger et améliorer leurs programmes. Ils apprendront que les échecs font partie du processus d'apprentissage.
-
Collaboration : Travailler en binômes ou en groupe pour résoudre les problèmes ensemble, partager des idées et collaborer pour trouver des solutions.
-
Patience : Apprendre à prendre le temps d’analyser les résultats, ajuster les paramètres et modifier les programmes en conséquence.
-
Créativité : Les élèves auront l’opportunité d’utiliser leurs idées pour résoudre les défis proposés de manière personnelle et originale.
Compétences transversales :
-
Résolution de problèmes : Chaque parcours présente des défis spécifiques. Les élèves devront analyser les problèmes rencontrés et ajuster leur programme pour les résoudre de manière autonome ou en groupe.
-
Pensée logique et algorithmique : Organiser des instructions dans un ordre cohérent et adapté aux objectifs fixés, notamment en utilisant des boucles de répétition et des conditions liées aux capteurs.
-
Gestion du temps et organisation : Les élèves devront gérer leur temps pour tester, ajuster et valider leurs programmes tout en respectant les délais de l’activité.
-
Autonomie et prise d'initiative : Bien que le travail collaboratif soit encouragé, les élèves devront également faire preuve d’autonomie pour trouver des solutions et tester leurs propres idées de programmation.
Déroulement des parcours
Les élèves réaliseront deux parcours en utilisant le robot Codey Rocky. Pour chaque parcours, ils devront suivre des étapes précises de programmation à l’aide du logiciel mBlock, puis ajuster leur code en fonction des résultats observés.
Parcours 1 : Utilisation d’une boucle de répétition
-
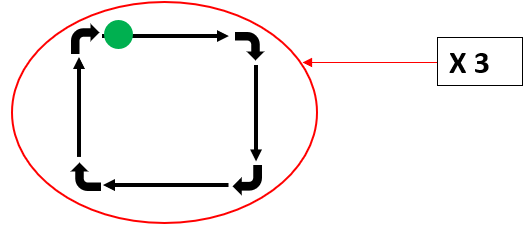
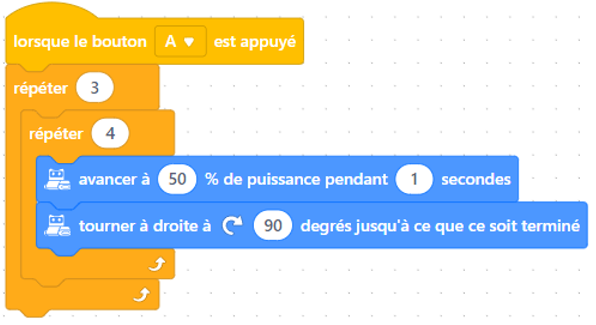
Présentation du défi : Expliquer aux élèves le but du premier parcours, qui consiste à programmer Codey Rocky pour effectuer un trajet spécifique en boucle, ici une boucle répétitives de 3.
-
Objectif du parcours : Utiliser une boucle de répétition pour faire en sorte que le robot répète une séquence de mouvements de manière continue. Le nombre de blocs maximum dans ce programme est de 5.
-
Étapes de la programmation :
- Créer une séquence de base pour faire avancer le robot et tourner à différents points.
- Intégrer une boucle de répétition pour que le robot répète cette séquence plusieurs fois.
-
Test et ajustements : Laisser les élèves tester leur programme et ajuster les paramètres si nécessaire pour garantir que le robot complète le parcours sans erreur.
-
Discussion de groupe : Échanger sur les difficultés rencontrées et les solutions trouvées. Comparer les différentes manières dont les élèves ont utilisé les boucles pour optimiser leurs programmes.*
- Correction :

Parcours 2 : Utilisation du capteur de détection d’obstacles
-
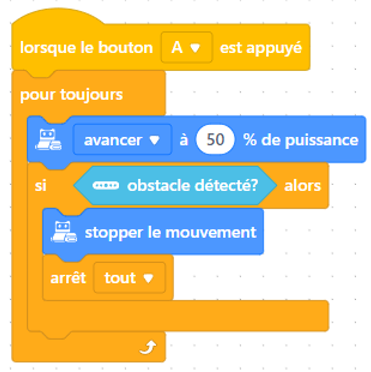
Présentation du défi : Expliquer aux élèves que le second parcours consiste à programmer le robot pour se déplacer en détectant et en évitant des obstacles grâce à son capteur de distance.
-
Objectif du parcours : Utiliser le capteur de détection d’obstacles pour permettre à Codey Rocky de réagir à son environnement en modifiant son comportement lorsqu’il rencontre un obstacle.
-
Étapes de la programmation :
- Créer une séquence de base pour faire avancer le robot.
- Intégrer le capteur de distance pour détecter les obstacles et faire en sorte que le robot s’arrête lorsqu’il en rencontre un.
- Utiliser des blocs de conditions (« si... alors... ») pour que le robot prenne des décisions en fonction de ce qu’il détecte.
-
Test et ajustements : Permettre aux élèves de tester leur programme sur un parcours avec des obstacles. Ils devront observer comment le robot réagit et ajuster les conditions et distances de détection si nécessaire.
-
Bilan collectif : Faire un retour en groupe sur les difficultés rencontrées, notamment sur l’utilisation des capteurs, et discuter des solutions trouvées pour que le robot puisse naviguer correctement dans un environnement rempli d’obstacles.
- Correction :

Conclusion et retour d’expérience
À la fin de l'activité, chaque groupe partagera son expérience avec la classe :
- Quelles difficultés ont-ils rencontrées ?
- Quelles solutions ont été mises en place ?
- Quelles compétences ont-ils développées (persévérance, logique, collaboration) ?
Phase 3 - Suivi de ligne avec Codey
Objectif général :
Dans cette phase, les élèves vont approfondir leurs compétences en programmation et robotique en apprenant à créer un suiveur de ligne avec le robot Codey Rocky. Ils vont programmer deux types de suivi de ligne : un suivi basique basé sur des conditions simples, et un suivi fluide, qui optimise les mouvements du robot pour un déplacement plus souple.
Compétences techniques :
-
Utilisation des capteurs de lumière : Les élèves apprendront à utiliser les capteurs de détection de couleur du robot pour différencier les surfaces noires et blanches.
-
Programmation conditionnelle : Ils utiliseront des blocs de conditions (« si... alors... ») pour réagir à la détection de couleurs et ajuster les mouvements du robot en conséquence.
-
Optimisation du mouvement : Pour le second parcours, les élèves découvriront comment améliorer la fluidité des déplacements du robot en ajustant la sensibilité des capteurs et la vitesse des roues.
-
Débogage et ajustement de paramètres : Les élèves devront tester, corriger et ajuster leurs programmes pour que le robot suive la ligne de manière efficace, qu’il s’agisse d’un suivi de ligne basique ou fluide.
Compétences transversales :
-
Résolution de problèmes : Les élèves devront ajuster leurs algorithmes et leur logique en fonction des résultats obtenus lors des tests.
-
Précision et ajustement des paramètres : Pour le parcours fluide, ils apprendront à affiner les réglages de vitesse et la sensibilité des capteurs pour obtenir un comportement plus naturel et efficace.
-
Gestion du temps : Organiser leur temps pour concevoir, tester, ajuster et valider leur programme dans les délais impartis.
-
Esprit d’équipe : Travailler en binôme ou en groupe pour résoudre les défis de suivi de ligne, partager des idées et améliorer les solutions ensemble.
Déroulement des parcours
Les élèves réaliseront deux parcours distincts avec des niveaux de difficulté croissants pour programmer Codey Rocky à suivre une ligne tracée au sol.
Parcours 1 : Suiveur de ligne basique
-
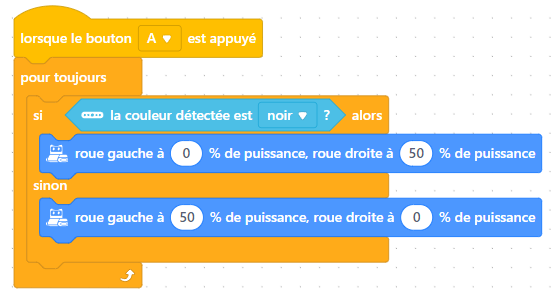
Présentation du défi : Le robot doit suivre une ligne en alternant les actions des roues en fonction de la couleur détectée (noir ou blanc).
-
Objectif du parcours :
- Si le capteur de gauche détecte la couleur noire, seule la roue gauche s'active pour tourner vers la droite.
- Si le capteur de droite détecte la couleur blanche, seule la roue droite s'active pour tourner vers la gauche.
-
Étapes de la programmation :
- Utiliser les blocs conditionnels pour définir les actions des roues selon la couleur détectée par les capteurs de Codey Rocky.
- Assigner les actions des roues en fonction de la couleur noire pour tourner à droite et de la couleur blanche pour tourner à gauche.
-
Test et ajustements :
- Laisser les élèves tester leur programme sur une piste simple avec une ligne noire sur fond blanc.
- Ils ajusteront les vitesses des roues et les conditions si le robot dévie ou ne suit pas correctement la ligne.
-
Discussion de groupe : Échanger sur les stratégies utilisées pour améliorer le suivi de la ligne et résoudre les problèmes de déviation ou de perte de la ligne.
- Correction :

Parcours 2 : Suivi de ligne fluide
-
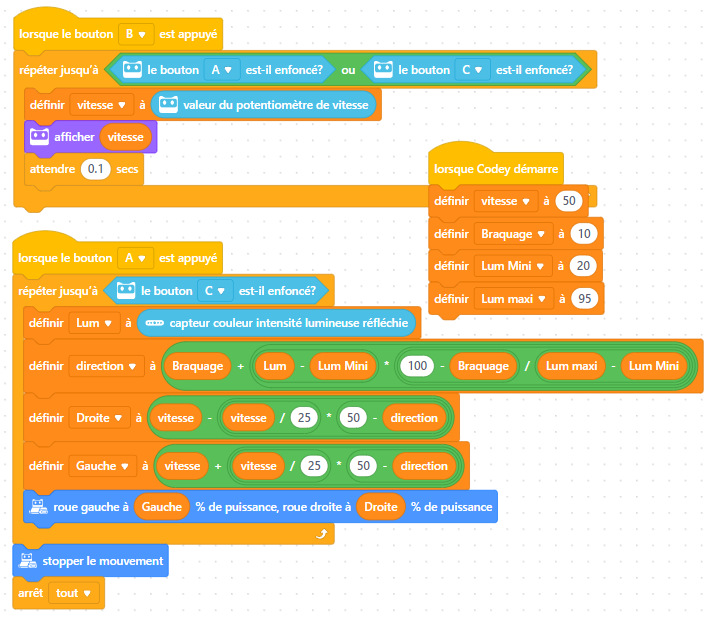
Présentation du défi : Cette fois-ci, les élèves doivent programmer le robot pour qu'il suive la ligne de manière plus fluide, avec des virages progressifs et sans arrêts brusques.
-
Objectif du parcours :
- Utiliser les capteurs pour ajuster progressivement la vitesse des roues, afin de maintenir le robot centré sur la ligne et éviter des mouvements saccadés.
- Utiliser les capteurs pour ajuster progressivement la vitesse des roues, afin de maintenir le robot centré sur la ligne et éviter des mouvements saccadés.
-
Étapes de la programmation :
- Utiliser les capteurs de lumière pour détecter la position du robot par rapport à la ligne.
- Ajuster la vitesse des roues de façon continue (par exemple, faire ralentir une roue au lieu de l'arrêter complètement).
- Éviter les changements de direction trop brusques en ajustant les conditions de manière plus douce et progressive.
-
Test et ajustements :
- Les élèves testeront le robot sur une piste avec des courbes plus complexes.
- Ils ajusteront la vitesse des roues en fonction des courbes et de la réactivité des capteurs pour rendre les mouvements plus fluides.
- Les élèves devront tester plusieurs configurations pour atteindre un suivi fluide.
-
Bilan collectif :
- Comparer les différences entre les deux méthodes de suivi (basique vs fluide).
- Discuter des réglages qui ont permis d'améliorer la fluidité du robot et de l'impact des ajustements sur la vitesse et la précision des mouvements.
- Correction :

Conclusion et retour d’expérience
À la fin de l’activité, chaque groupe pourra partager ses observations :
- Quelles étaient les principales différences entre le suivi de ligne basique et fluide ?
- Quels ajustements étaient nécessaires pour améliorer la précision et la fluidité ?
- Quelles compétences techniques et transversales ont été développées ?