Club Robotique Cycle 1 - LittleBot
- Description du projet
- Programmation d'actionneurs et de capteur
- Câblage et programmation du LittleBot
- Programme MBLOCK
Description du projet
Introduction
Pour le premier cycle, nous allons créer un robot mobile très simple appelé LittleBot.
Pour ce robot, nous utiliserons la programmation par bloc de type Scratch via l'environnement de développement MBlock ainsi que le logiciel de modélisation 3D TinkerCAD.
Durant ce cycle, nous apprendrons à utiliser une imprimante 3D mais aussi des composants pour de l'électronique.
Nous découvrirons les principes fonctionnement et la mise en œuvre d'un capteur ultrason ainsi que de servomoteurs.
Le programme, le câblage et l'assemblage sera donné pour la réalisation de ce projet.
L'objectif final de ce cycle est de faire avancer le robot, le faire tourner et de lui faire éviter des objets.
Description du cycle
- Compétences Animateur
- Prérequis participants
- classe de CM1 à 5ème
- Notions de base en électricité et circuit électronique
- Notions de base en géométrie
- Des bases en Langage de programmation par bloc "scratch" et pour les collégiens en langage "C"
-
Logiciels :
- Programmation : MBlock (scratch) et Arduino IDE (C)
- Modélisation CAO : TinkerCAD, ONSHAPE, FreeCAD
- Préparation impression 3D (slicer) : Bambu Studio, Cura
-
Compétences et technologies :
- Programmer une Carte microcontrôleur Arduino depuis MBlock et Arduino IDE
- Stocker dans une variable la valeur d'un Capteur de distance ultrason HC-SR04
- Piloter un Servomoteur en donnant la valeur de sa vitesse de rotation
- Télécharger le modèle 3D d'une pièce sur internet
- Modifier le modèle 3D d'une pièce avec TinkerCAD
- Préparer un fichier d'impression 3D avec ...
- Lancement d'une impression 3D sur l'imprimante ...
Description du déroulé
~9 séances :
- Introduction Arduino et MBlock
- Actionneur : servomoteur (déplacement)
- Capteur : ultrason (distance)
- Couplage capteur moteur
- ~2 séances sur TinkerCAD (modification de certaines pièces du Little Bot)
- ~1 séances sur l'impression 3D
- Assemblage du LittleBot
- Programmation de la cinématique du véhicule
- Algorithmie pour stratégie d'évitement d'obstacle
Matériel
Projet inspiré de : https://www.thingiverse.com/thing:2417739
- 1 x Arduino Nano ou compatible (seeeduino, funduino,...) : ~10€
- 1 x câble USB C : ~1€
- 1 x Sensor Shield pour Arduino Nano : ~3€
- 2 x servomoteur à rotation 360° (DM-S0090D-R 9g/0.08s/1.6kg.cm) : ~2€
- 1 x Module ultrason (HC-SR04) : ~2€
- 2 x élastique pour les roues (diamètre Xmm)
- 1 x porte pile 4xaa : ~2€
Une imprimante 3D pour imprimer les pièces suivantes (~5€ de filament) :
- Châssis
- Capot
- Roues avec rainure pour insertion élastique
Programmation d'actionneurs et de capteur
Programmation d'un servomoteur :
Avant de passer au vif du sujet je vous invite à consulter cette page pour savoir comment fonctionne un servomoteur et cette page pour programmer un servomoteur.
Programmation d'un capteur Ultrasons :
Je vous conseille de faire de même pour connaître le fonctionnement et comment savoir programmer ce capteur, vous trouverez tous ca sur cette page.
Câblage et programmation du LittleBot
Le câblage :
Pour le câblage et la programmation du LittleBot, il nous faut :
- Un Arduino Nano (ou équivalant)
- Un Sensor Shield
- Un capteur à ultrason (HC-SR04)
- 2 Servomoteur / Moteur (DM-S0090D)
Le branchement ce présente comme ceci :
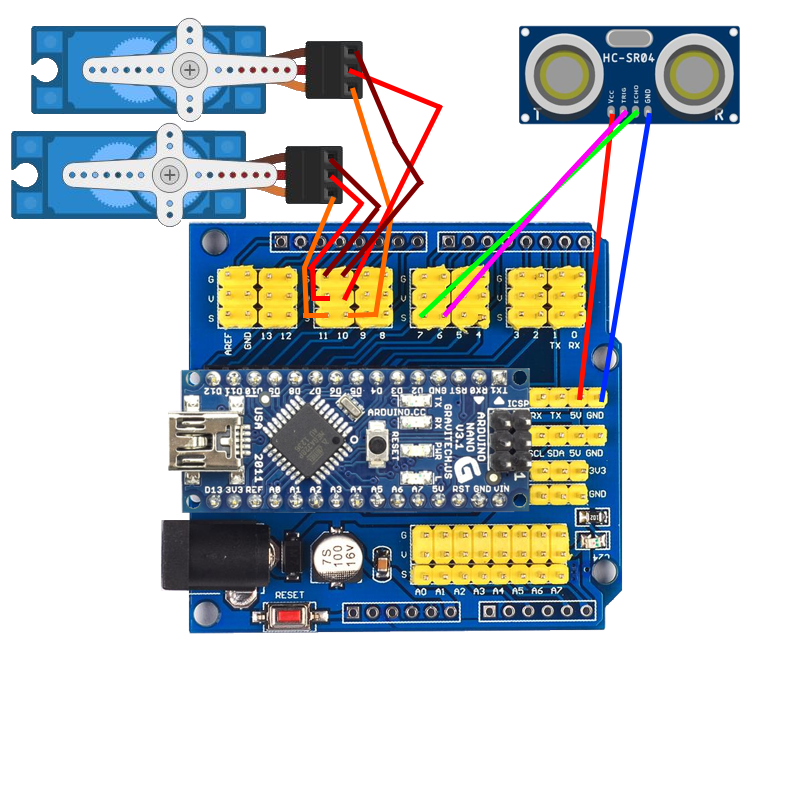
- Tout d'abord nous branchons l'Arduino Nano sur notre Sensor Shield. Attention, il y a un sens. Le port de charge doit être sur l'extérieur de votre Shield.
- Nous allons a présent brancher notre capteur à ultrason :
- VCC sur une broche 5V.
- Trig sur la broche 6.
- Echo sur la broche 7.
- GND sur une broche GND
3. Nous allons brancher nos Servomoteurs, les câbles de nos servos sont tous reliés à un raccord. Celui ci ne peut être branché que dans un seul sens. Nous brancherons donc un servo sur la broche 10 et un servo sur la broche 11.
- Le fil marron sur la broche G
- Le fil rouge sur la broche V
- Le fil orange sur la broche S
Ainsi le servo qui est sur la broche 10 sera notre roue droite et le Servo sur la pin 11 sera notre roue gauche.
Votre câblage est terminé.
Passons maintenant à la programmation.
Le programme :
Ici nous décomposerons notre programme pour bien l'écrire.
Tout d'abord, nous déclarons la librairie et les servo que nous utiliserons :
#include <Servo.h>
#define trigPin 6
#define echoPin 7
Servo servo1;
Servo servo2;Puis nous déclarons sur quelles pins sont branchés nôtre capteur et nos servos :
void setup() {
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
servo1.attach(11);
servo2.attach(10);
}Rentrons dans le vive du sujet :
void loop() {
long duration, distance; // Nous déclarons notre variable que nous retrouverons plus tard
digitalWrite(trigPin, LOW); //Ici notre capteur à ultrason est en "position 0"
delayMicroseconds(2); // Pendant 2 Microsecondes
digitalWrite(trigPin, HIGH); //Ici notre capteur à ultrason est "activé"
delayMicroseconds(10); //Pendant 10 Microsecondes
digitalWrite(trigPin, LOW); //Puis nous le retournons en position "0"
duration = pulseIn(echoPin, HIGH); // Nous déclarons notre variable "duration" qui est la durée du trajet du son.
distance = (duration*0.034) / 2; // Nous déclarons notre variables "distance" par la duréé multiplié par la vitesse du son le tout divisé par 2.
if (distance < 20) { // Nos déplacement commence ici, "Si la distance est inférieur à 20cm alors..."
servo1.writeMicroseconds(1000);//Servo Gauche tourne à l'envers
servo2.writeMicroseconds(2000);//Servo Droit tourne à l'envers
delay (2000);// pendant 2 sec
servo1.writeMicroseconds(1000);//Servo Gauche tourne à l'envers
servo2.writeMicroseconds(1500);//Arrêt du Servo Droit
delay (2000);// pendant 2 sec
}
else { //Sinon...
servo1.writeMicroseconds(2000);//Servo Gauche tourne
servo2.writeMicroseconds(1000);//Servo Droit tourne
delay (2000);// pendant 2 sec
}
}Puis nous assemblons le tout, voici à quoi cela devrait ressembler :
#include <Servo.h>
#define trigPin 6
#define echoPin 7
Servo servo1;
Servo servo2;
void setup() {
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
servo1.attach(11);
servo2.attach(10);
}
void loop() {
long duration, distance;
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
duration = pulseIn(echoPin, HIGH);
distance = (duration*0.034) / 2;
if (distance < 20) {
servo1.writeMicroseconds(1000);
servo2.writeMicroseconds(2000);
delay (2000);
servo1.writeMicroseconds(1000);
servo2.writeMicroseconds(1500);
delay (2000);
}
else {
servo1.writeMicroseconds(2000);
servo2.writeMicroseconds(1000);
delay (2000);
}
}
Programme MBLOCK
