Club Robotique Cycle 5 - Poubelle Connectée
- Phase 1 - Théorie et fonctionnement des composants
- Phase 2 - Utilisation des composants et programmation de la poubelle connectée
Phase 1 - Théorie et fonctionnement des composants
Phase 1 - Théorie et fonctionnement des composants
Objectifs pédagogiques :
- Comprendre le fonctionnement de l’Arduino Nano et son Shield.
- Découvrir le rôle d’un capteur à ultrasons (HC-SR04).
- Apprendre comment fonctionne un servomoteur et comment le contrôler.
- Apprendre à câbler ces composants ensemble correctement pour un projet Arduino.
Matériel nécessaire :
- 1 x Arduino Nano
- 1 x Shield pour Arduino Nano (ou une breadboard pour faciliter les connexions)
- 1 x Capteur à ultrasons HC-SR04
- 1 x Servomoteur SG90
- Fils de connexion
- 1 x Câble USB pour programmer l’Arduino Nano
- 1 x Ordinateur avec l’IDE Arduino installé
1. Introduction à l'Arduino Nano
Qu'est-ce que l'Arduino ?
https://innovation.iha.unistra.fr/books/robotique-educative/page/quest-ce-que-larduino
2. Capteur à ultrasons HC-SR04
Comment fonctionne le capteur à ultrasons ?
https://innovation.iha.unistra.fr/books/robotique-educative/page/quest-ce-quun-capteur-a-ultrasons
3. Fonctionnement du servomoteur SG90
Comment fonctionne un servomoteur ?
https://innovation.iha.unistra.fr/books/robotique-educative/page/quest-ce-quun-servo-moteur
Explication du câblage complet
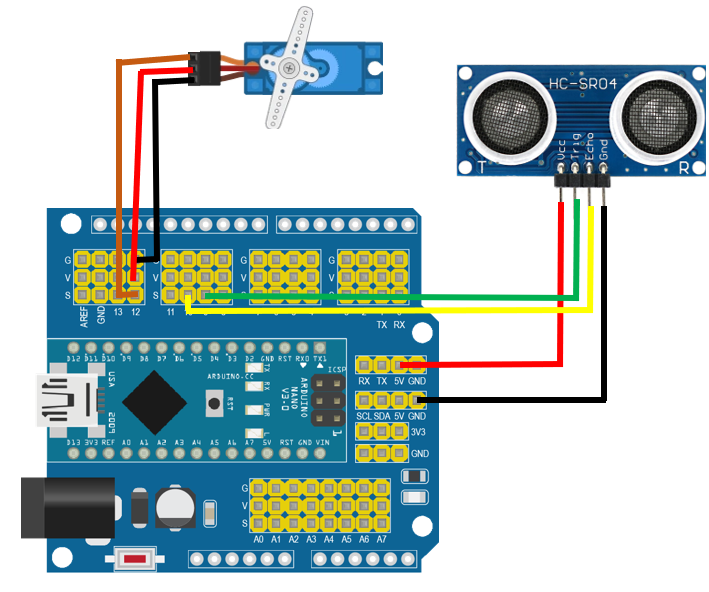
Maintenant que nous avons vu chaque composant individuellement, voici un résumé du câblage complet :
-
Capteur à ultrasons (HC-SR04) :
- VCC → 5V de l’Arduino
- GND → GND de l’Arduino
- TRIG → D9 de l’Arduino
- ECHO → D10 de l’Arduino
-
Servomoteur :
- VCC (fil rouge) → 5V de l’Arduino
- GND (fil noir) → GND de l’Arduino
- Signal (fil jaune) → D12 de l’Arduino
Conclusion et exercices pratiques
Synthèse :
- Nous avons vu comment l’Arduino Nano fonctionne avec un shield pour faciliter les connexions.
- Nous avons compris comment le capteur à ultrasons mesure des distances et comment nous allons utiliser ces informations pour contrôler un servomoteur.
- Le servomoteur répond à des signaux PWM pour se déplacer selon des angles précis.
Exercice pratique :
Pour terminer la séance, les participants peuvent reproduire le câblage décrit ci-dessus sur leur propre montage.
Correction de L'exercice :
Code à utiliser : Le code sera introduit dans la prochaine séance, mais vous pouvez donner un aperçu du fonctionnement et les amener à réfléchir sur la façon dont les composants vont interagir ensemble.
Phase 2 - Utilisation des composants et programmation de la poubelle connectée
Phase 2 - Utilisation des composants et programmation de la poubelle connectée :
Objectifs pédagogiques :
- Apprendre à utiliser le capteur à ultrasons (HC-SR04) pour mesurer des distances.
- Apprendre à contrôler le servomoteur en fonction des signaux PWM.
- Assembler les deux composants pour que le servomoteur se déplace lorsque la distance mesurée est inférieure à 5 cm.
- Comprendre l'interaction entre les capteurs et les actionneurs dans un projet Arduino.
Matériel nécessaire :
- 1 x Arduino Nano
- 1 x Shield pour Arduino Nano ou une breadboard
- 1 x Capteur à ultrasons HC-SR04
- 1 x Servomoteur SG90
- Fils de connexion
- 1 x Câble USB pour programmer l’Arduino
- 1 x Ordinateur avec l’IDE Arduino installé
1. Utilisation du capteur à ultrasons HC-SR04
Objectif :
Les élèves vont apprendre à écrire un programme qui utilise le capteur à ultrasons pour mesurer la distance.
Instructions :
-
Câblage :
- Suivez le câblage décrit dans la première séance :
- VCC → 5V de l’Arduino
- GND → GND de l’Arduino
- TRIG → D9 de l’Arduino
- ECHO → D10 de l’Arduino
- Suivez le câblage décrit dans la première séance :
-
Écriture du code : Demandez aux élèves d'écrire ou de copier le code suivant dans l’IDE Arduino :
// Déclaration des pins du capteur à ultrasons const int trigPin = 9; const int echoPin = 10; void setup() { Serial.begin(9600); // Initialiser la communication série pinMode(trigPin, OUTPUT); // Définir le trigPin comme une sortie pinMode(echoPin, INPUT); // Définir l'echoPin comme une entrée } void loop() { // Envoi d'un signal digitalWrite(trigPin, LOW); delayMicroseconds(2); digitalWrite(trigPin, HIGH); delayMicroseconds(10); digitalWrite(trigPin, LOW); // Lecture de la durée du signal de retour long duration = pulseIn(echoPin, HIGH); int distance = duration * 0.034 / 2; // Calcul de la distance // Afficher la distance dans le moniteur série Serial.print("Distance: "); Serial.print(distance); Serial.println(" cm"); delay(500); // Attendre un peu avant la prochaine mesure } -
Tester le code :
- Demandez aux élèves de télécharger le code sur leur Arduino.
- Ouvrir le moniteur série (dans l'IDE Arduino) pour voir les distances mesurées.
2. Utilisation du servomoteur SG90
Objectif :
Les élèves vont apprendre à contrôler le servomoteur en utilisant des signaux PWM.
Instructions :
-
Câblage :
- Câblez le servomoteur selon le schéma précédent :
- Rouge (VCC) → 5V de l’Arduino
- Noir (GND) → GND de l’Arduino
- Jaune (Signal) → D6 de l’Arduino
- Câblez le servomoteur selon le schéma précédent :
-
Écriture du code : Demandez aux élèves d'écrire ou de copier le code suivant dans l’IDE Arduino :
#include <Servo.h> // Inclure la bibliothèque Servo Servo myServo; // Créer un objet Servo void setup() { myServo.attach(6); // Attacher le servomoteur à la pin D6 myServo.write(0); // Position initiale à 0 degrés } void loop() { // Faire tourner le servomoteur à 90 degrés myServo.write(90); delay(1000); // Attendre 1 seconde myServo.write(0); // Retourner à 0 degrés delay(1000); // Attendre 1 seconde } -
Tester le code :
- Demandez aux élèves de télécharger le code sur leur Arduino.
- Observez le mouvement du servomoteur, qui devrait osciller entre 0 et 90 degrés.
3. Assemblage du capteur à ultrasons et du servomoteur
Objectif :
Les élèves vont assembler les deux composants pour que le servomoteur se déplace lorsque la distance mesurée est inférieure à 5 cm.
Câblage :
Utiliser les connexions précédemment définies. Les deux composants doivent être câblés en parallèle à l'Arduino. Voici un résumé :
- Capteur à ultrasons :
- VCC → 5V de l’Arduino
- GND → GND de l’Arduino
- TRIG → D9 de l’Arduino
- ECHO → D10 de l’Arduino
- Servomoteur :
- VCC (fil rouge) → 5V de l’Arduino
- GND (fil noir) → GND de l’Arduino
- Signal (fil jaune) → D6 de l’Arduino
Écriture du code final :
Demandez aux élèves d'écrire ou de copier le code suivant, qui intègre le capteur et le servomoteur :
#include <Servo.h> // Inclure la bibliothèque Servo
// Déclaration des pins
const int trigPin = 9;
const int echoPin = 10;
Servo myServo;
void setup() {
Serial.begin(9600); // Initialiser la communication série
pinMode(trigPin, OUTPUT); // Définir le trigPin comme sortie
pinMode(echoPin, INPUT); // Définir l'echoPin comme entrée
myServo.attach(6); // Attacher le servomoteur à la pin D6
myServo.write(0); // Position initiale à 0 degrés
}
void loop() {
// Envoyer un signal
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
// Lire la durée du signal de retour
long duration = pulseIn(echoPin, HIGH);
int distance = duration * 0.034 / 2; // Calculer la distance
// Afficher la distance dans le moniteur série
Serial.print("Distance: ");
Serial.print(distance);
Serial.println(" cm");
// Si la distance est inférieure à 5 cm, déplacer le servomoteur
if (distance < 5) {
myServo.write(140); // Positionner le servomoteur à 180 degrés
delay(1000); // Attendre 1 seconde
myServo.write(0); // Retourner à 0 degrés
}
delay(500); // Attendre un peu avant la prochaine mesure
}
4. Tester le projet
Instructions :
- Demandez aux élèves de télécharger le code final sur leur Arduino.
- Placez un objet à moins de 5 cm du capteur à ultrasons.
- Observez le servomoteur se déplacer à 180 degrés pendant 1 seconde, puis revenir à sa position initiale.
5. Conclusion et discussion
Synthèse :
- Les élèves ont appris à utiliser le capteur à ultrasons pour mesurer des distances.
- Ils ont contrôlé un servomoteur en fonction des signaux PWM.
- Ils ont assemblé les deux composants pour créer un projet fonctionnel où le servomoteur se déplace en réponse à la détection d’un objet à moins de 5 cm.
Questions de réflexion :
- Comment pourrait-on améliorer ce projet ? (ex. : ajouter une LED qui s'allume lorsque l'objet est détecté)
- Quelles autres applications pourraient utiliser un capteur à ultrasons et un servomoteur ensemble ?
Projet similaire
https://www.hackster.io/FANUEL_CONRAD/automatic-soap-dispenser-75abd6