Club Robotique - LittleBot
- Description du projet
- Brainstorming : Imaginer notre robot de A à Z
- Modification du châssis du LittleBot et Impression 3D
- Fonctionnement et programmation des composants
- Montage et Câblage du LittleBot
- Programmation Littlebot
- Animation LittleBot (2h30)
Description du projet
Introduction
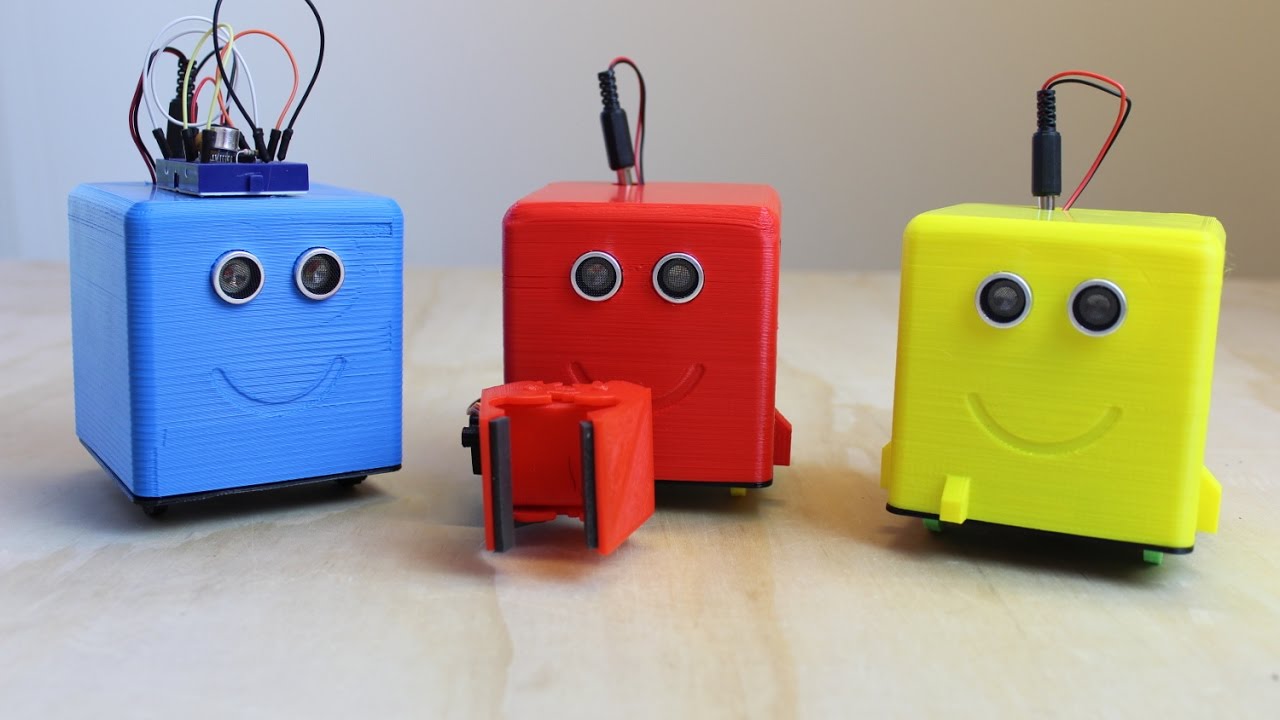
Pour ce cycle, nous allons créer un robot mobile très simple appelé LittleBot.
Description des compétences visées :
Compétences techniques et mécaniques
-
Conception : adapter et améliorer le modèle 3D du robot
-
Assemblage de composants : apprendre à manipuler et assembler les différentes parties (châssis, moteur, composants électroniques, etc.)
-
Choix des matériaux : identifier les matériaux adaptés au projet
Compétences en électronique
-
Découverte et câblage de capteurs : utiliser un capteur ultrasons pour détecter une présence.
-
Contrôle de moteurs : apprendre à utiliser des moteurs pour le déplacement du robot.
-
Schémas électriques : savoir réaliser un schéma de câblage et connecter les composants sur une carte Arduino.
Compétences en programmation
-
Programmation d'un microcontrôleur Arduino : écrire un code qui gère les capteurs, les délais, et l'action du moteur.
-
Logique conditionnelle : comprendre comment programmer des conditions simples.
-
Optimisation du fonctionnement : ajuster les temps de réponse, durée de déplacement, détection d'obstacle etc.
Compétences transversales
-
-
Gestion de projet : planifier les étapes de réalisation, répartir les tâches, respecter les délais.
-
Résolution de problèmes : savoir réagir face aux imprévus techniques ou fonctionnels.
-
Travail en équipe : collaborer efficacement si le projet est collectif.
-
Description du déroulé des séances:
~9 séances :
- Introduction du projet (brainstorming)
- ~3 séances sur TinkerCAD et sur l'impression 3D (modification de certaines pièces du Little Bot)
- ~1 séance sur l'actionneur : servomoteur RC 360°(déplacement)
- ~1 séance sur le capteur : ultrason (distance)
- ~1 séance sur le couplage capteur moteur
- ~1 séance sur l'assemblage du LittleBot
- ~2 séances sur la programmation du LittleBot
Matériel
Projet inspiré de : https://www.thingiverse.com/thing:2417739
- 1 x Arduino Nano ou compatible (seeeduino, funduino,...) : ~10€
- 1 x câble USB C : ~1€
- 1 x Sensor Shield pour Arduino Nano : ~3€
- 2 x servomoteur à rotation 360° (DM-S0090D-R 9g/0.08s/1.6kg.cm) : ~2€
- 1 x Module ultrason (HC-SR04) : ~2€
- 2 x élastique pour les roues
- 1 x porte pile 4xaa : ~2€
- Une imprimante 3D pour imprimer les pièces du robot (fichier disponible à la prochaine page)(~5€ de filament) :
Brainstorming : Imaginer notre robot de A à Z
Avant toute construction ou programmation, une séance est consacrée à un brainstorming collectif. L’objectif est de faire émerger les idées des enfants/jeunes sur les besoins, les fonctions, les matériaux et les étapes nécessaires à la réalisation du robot.
Déroulé de la séance :
-
Introduction : Je pose une question simple mais ouverte, par exemple :
"Si on devait construire un robot de A à Z, qu’est-ce qu’il faudrait prévoir ?" -
Réflexion individuelle : Chacun note ses idées sur un post-it ou dans son cahier.
-
Mise en commun au tableau : Les idées sont regroupées en grandes catégories (alimentation, capteurs, structure, mouvement, design, programmation, etc.)
-
Discussion et priorisation : On débat de la faisabilité, on regroupe les idées similaires.
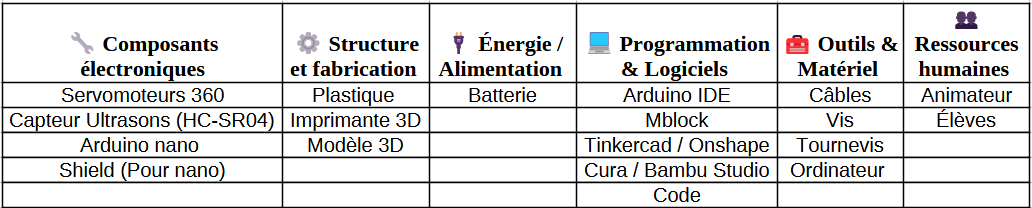
Tableau regroupant les idées après débat :
Objectifs pédagogiques :
-
Encourager l’expression et l’écoute active
-
Travailler en équipe
-
Introduire les notions de conception et de prototypage
Modification du châssis du LittleBot et Impression 3D
Le LittleBot dispose déjà de ses fichiers STL, comprenant la tête, la base, deux types de roues, ainsi qu’une demi-sphère permettant de le stabiliser. Toutefois, un problème a été identifié sur le fichier correspondant à la base, que nous allons corriger aujourd’hui.
Problème rencontré
La base du LittleBot a pour fonction de fixer les servomoteurs, de maintenir la batterie en place et de permettre l'installation de la carte Arduino Nano. Cependant, dans le fichier actuel, les trous de fixation du shield pour Arduino Nano ne sont pas positionnés correctement. C’est pourquoi nous allons modifier ce fichier.
Objectif
L’objectif de cette séance est de corriger le positionnement des trous de fixation dans le fichier STL de la base du LittleBot.
Ressources disponibles
Vous pouvez retrouver l’ensemble des fichiers STL du LittleBot ici ou dans les fichiers en pièce jointe.
Modification du Fichier :
Avant de commencer la modification, je vous invite à consulter :
- Cette page expliquant comment utiliser Tinkercad pour modifier un fichier 3D
- Cette page expliquant comment créer une classe sur Tinkercad (utile pour le travail en groupe ou en classe).
Étape 1 : Préparation de l’environnement
Une fois la classe créée sur Tinkercad , avec le fichier de référence correctement chargé, et que tous les élèves sont connectés, nous pouvons passer à la phase de modification.
Comment créer une classe sur tinkercad :
https://innovation.iha.unistra.fr/books/2-fablab-formation-machines-logiciels/page/creation-dune-classe-tinkercad
Sur l’interface principale de Tinkercad :
- Tout d'abord importer le fichier nommée "Base" en cliquant sur importer puis en le cherchant dans l'explorateur de fichier.


-
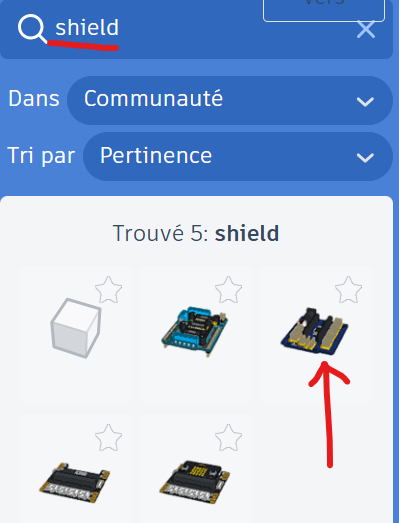
Dès que votre fichier est importer regardez dans la barre de recherche située à droite de l’écran en cliquant sur la loupe.

- Tapez le mot "shield" dans le champ de recherche.
-
Sélectionnez le troisième élément proposé dans la liste (il s’agit du modèle de shield compatible avec l’Arduino Nano).

Glisser le sur votre forme comme sur l'image ci-dessous.
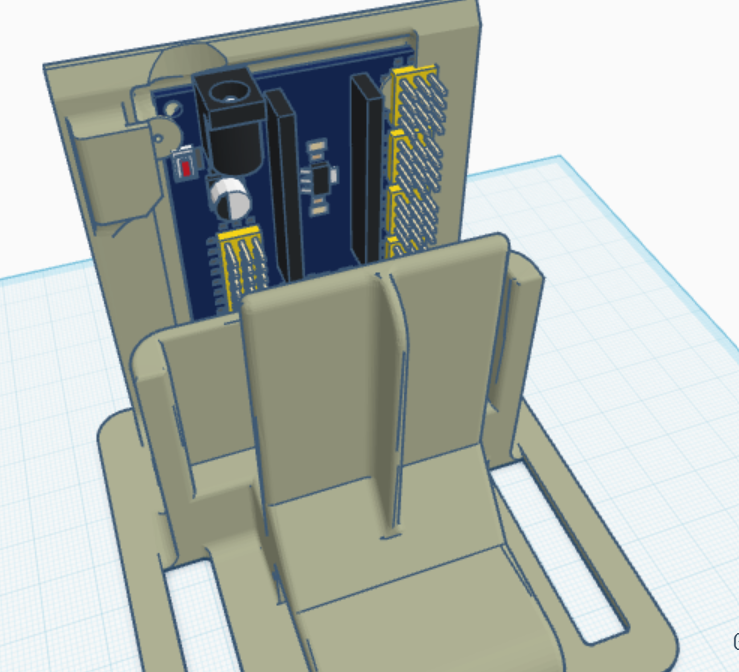
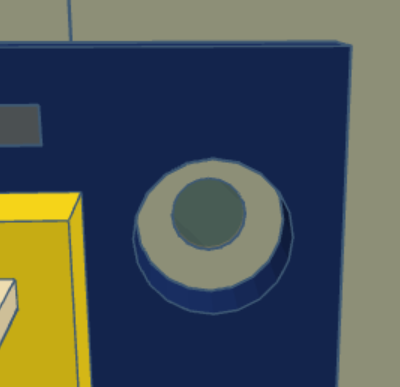
Etape 2 : Ajustement du Modèle 3D
Positionnez le de manière à ce que le trou en haut à gauche du shield soit parfaitement centré sur celui de la base.
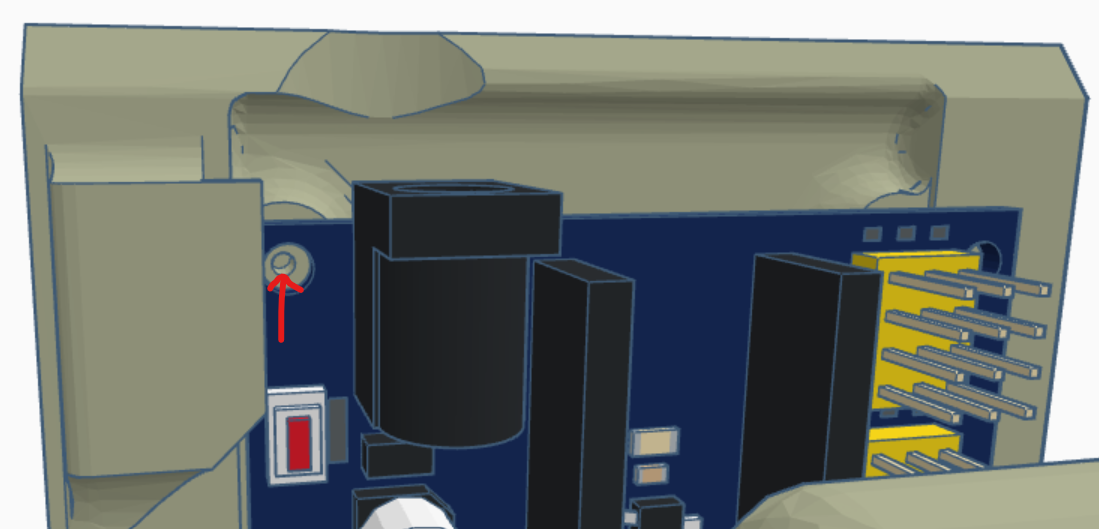
Faire un cylindre de 3mm x 1.5mm x 1.5mm.
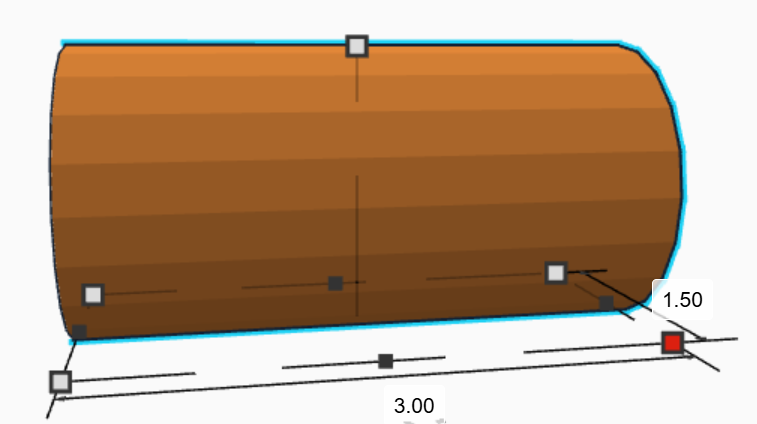
Le mettre en mode perçage ![]()
Puis le placer dans le trou en haut à droite du shield et l'enfoncer de 3mm comme ci-dessous.
Sélectionner le cylindre et la base puis les regrouper avec ce bouton  .
.
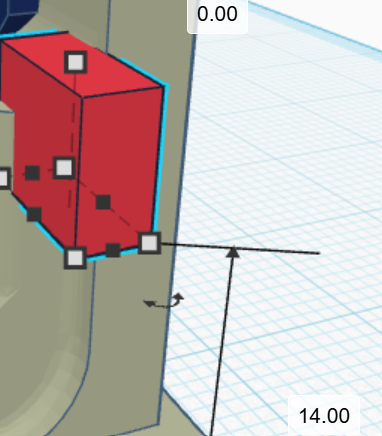
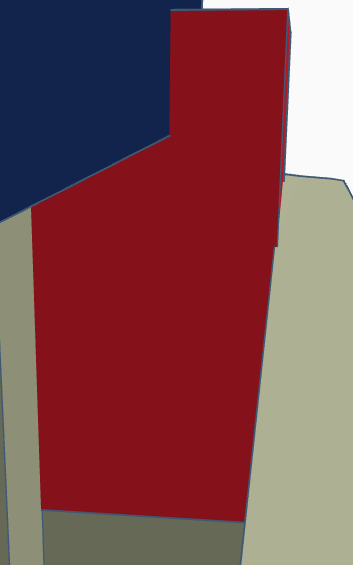
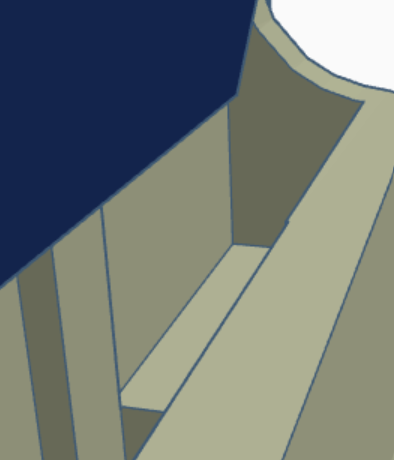
Pour la dernière étape d'ajustement, il faut percer le bas du châssis afin que le shield puisse bien se positionner.
Créer un cube de 7mm x 3mm x 6 mm.
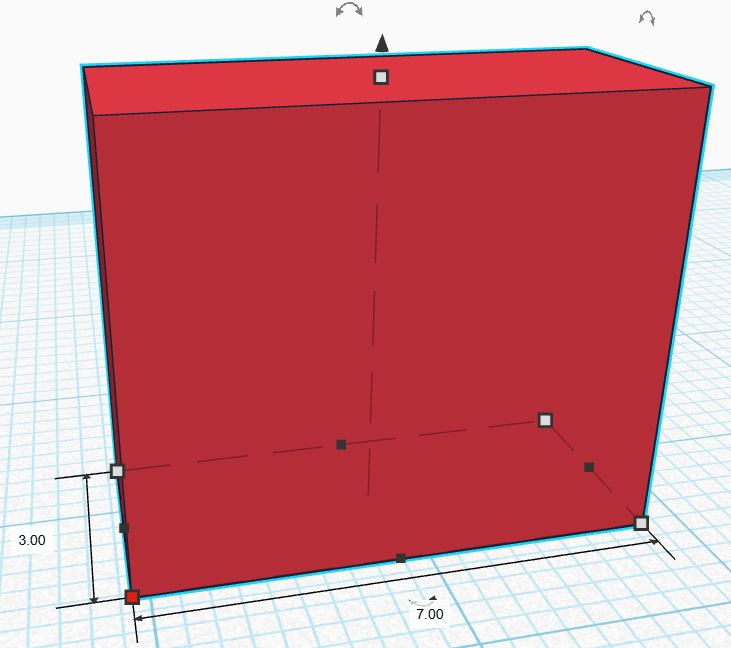
Le placer le à 14 mm de hauteur par rapport au sol.
Coller votre cube à votre base comme sur l'image ci-dessous.
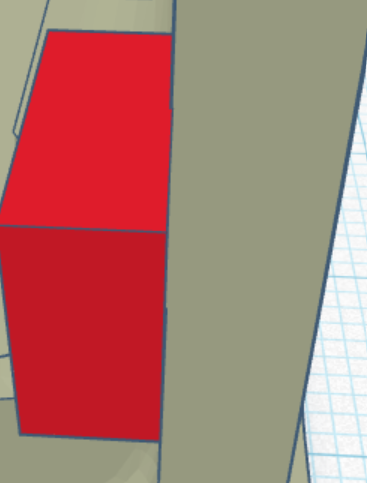
Et le rentrer de manière à ce que vous ne voyez plus la face de la base.
Mettre le cube en mode Perçage ![]() et le Regrouper
et le Regrouper ![]() avec la base.
avec la base.
Quand vous avez fini la modélisation vous pouvez supprimer le shield.
Etape 3 : Préparation à l'exportation
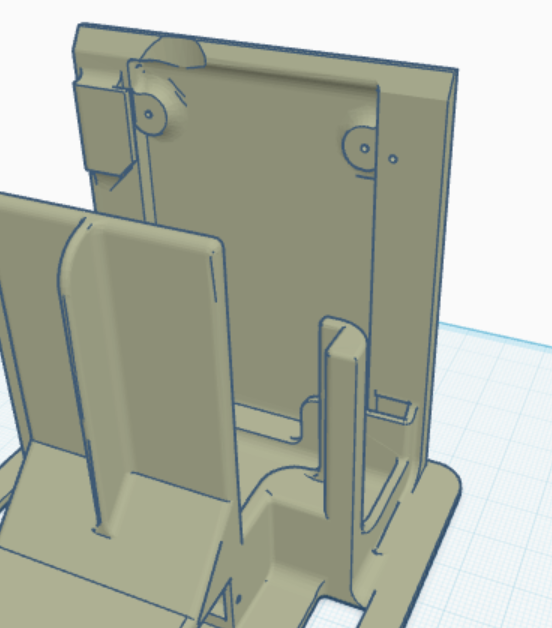
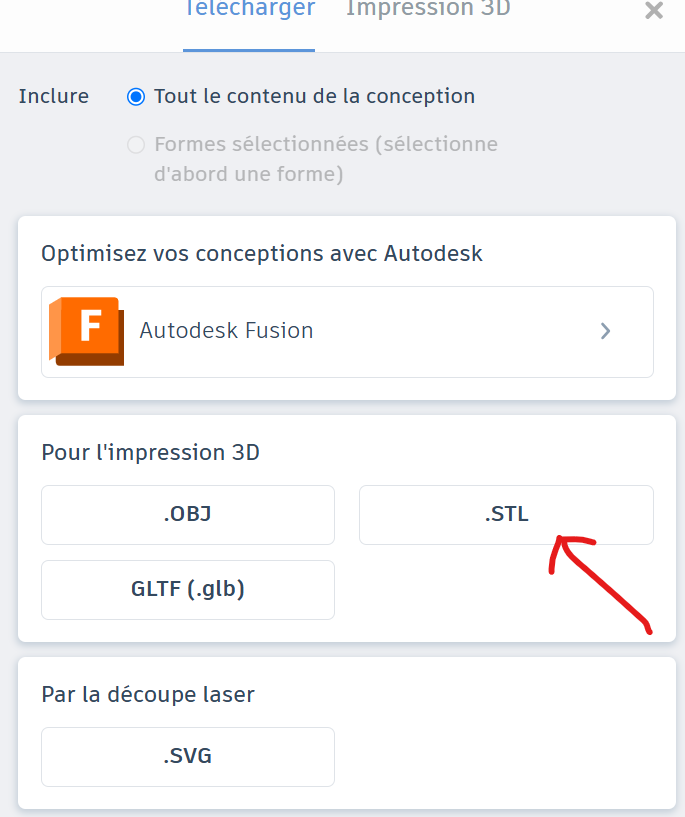
Exporter la pièce en STL.

Impression 3D :
Comme nous avons maintenant exporté notre pièce en STL qu'il faut l'imprimer, je vous invite donc à consulter cette page qui explique comment utiliser Cura (Slicer) ou cette page qui explique comment utiliser BambuStudio (Slicer).
Fonctionnement et programmation des composants
1. Introduction à l'Arduino Nano
Qu'est-ce que l'Arduino ?
https://innovation.iha.unistra.fr/books/robotique-educative/page/quest-ce-que-larduino
2. Fonctionnement et programmation d'un servomoteur RC 360°
Comment fonctionne le servomoteur RC 360° ? Consulter cette page.
Ensuite, consultez cette page pour apprendre à programmer le servomoteur RC 360°.
3. Capteur à ultrasons HC-SR04
Comment fonctionne le capteur à ultrasons ? Consulter cette page
4. Programmation d'un capteur à ultrasons HC-SR04 avec un servomoteur RC 360°
Vous avez vu comment programmer un servomoteur RC 360° et un capteur ultrasons individuellement. Maintenant, vous apprendrez à les utiliser en même temps. (voir partie "Programmation sur Mblock"
Programmation sur Mblock
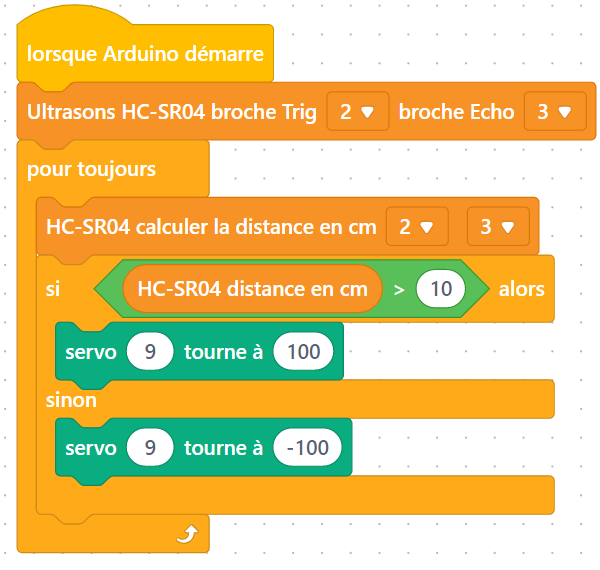
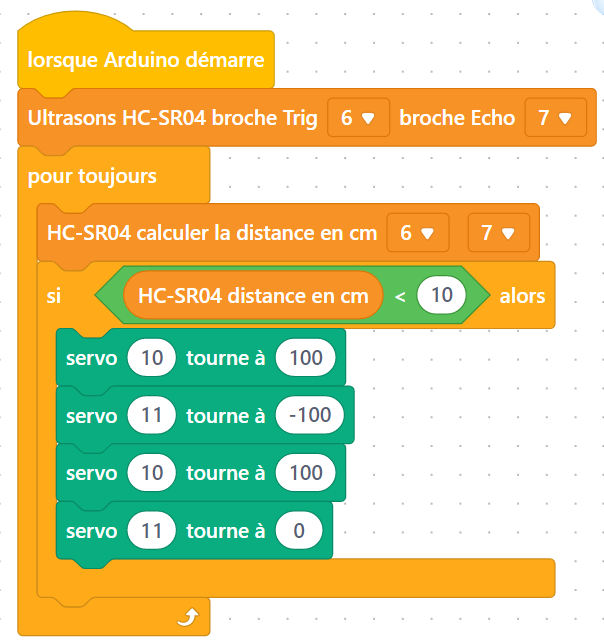
Exercice 1 : Changer le sens d'un servomoteur 360 grâce au capteur ultrasons
Consigne :
Programmez votre carte Arduino pour que le servomoteur réagisse en fonction de la distance mesurée par le capteur à ultrasons :
-
Si la distance mesurée est supérieure à 10 cm, le servomoteur doit tourner dans un sens à la vitesse maximale.
-
Si la distance mesurée est inférieure ou égale à 10 cm, le servomoteur tourner dans l'autre sens à la vitesse maximale.
Correction :
Programmation sur Arduino IDE
Exercice 2 : Changer le sens d'un servomoteur 360 grâce au capteur ultrasons
Consigne :
Programmez votre carte Arduino pour que le servomoteur réagisse en fonction de la distance mesurée par le capteur à ultrasons :
-
Si la distance mesurée est supérieure à 10 cm, le servomoteur doit tourner dans un sens à la vitesse maximale.
-
Si la distance mesurée est inférieure ou égale à 10 cm, le servomoteur tourner dans l'autre sens à la vitesse maximale.
Correction :
#include <Servo.h>
// Définir les broches du capteur HC-SR04
const int trigPin = 9;
const int echoPin = 10;
// Définir la broche du servomoteur
const int servoPin = 6;
Servo monServo;
void setup() {
Serial.begin(9600); // Initialisation du moniteur série
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
monServo.attach(servoPin); // Attache le servomoteur à la broche 6
}
void loop() {
// Mesure de la distance
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
long duree = pulseIn(echoPin, HIGH);
float distance = duree * 0.034 / 2; // Conversion en centimètres
Serial.print("Distance : ");
Serial.print(distance);
Serial.println(" cm");
// Contrôle du servomoteur
if (distance > 10) {
monServo.writeMicroseconds(2000);
} else {
monServo.writeMicroseconds(1000);
}
delay(200); // Petite pause pour éviter les mesures trop rapides
}
Montage et Câblage du LittleBot
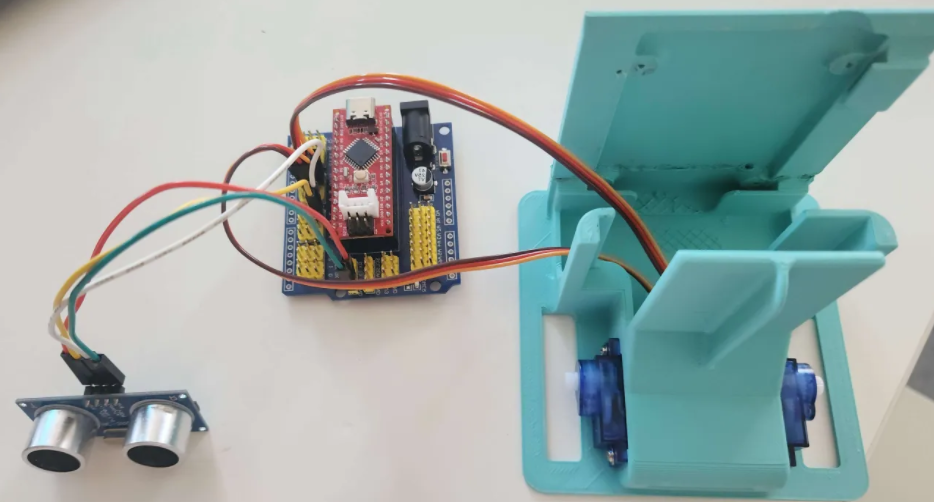
Etape 1 : Montage des Servomoteurs
Placez les servomoteurs dans la base du LittleBot en vous référant aux images ci-dessous.
⚠️ Attention : veillez à ce que l’axe des servomoteurs soit bien centré dans le trou prévu pour la roue.
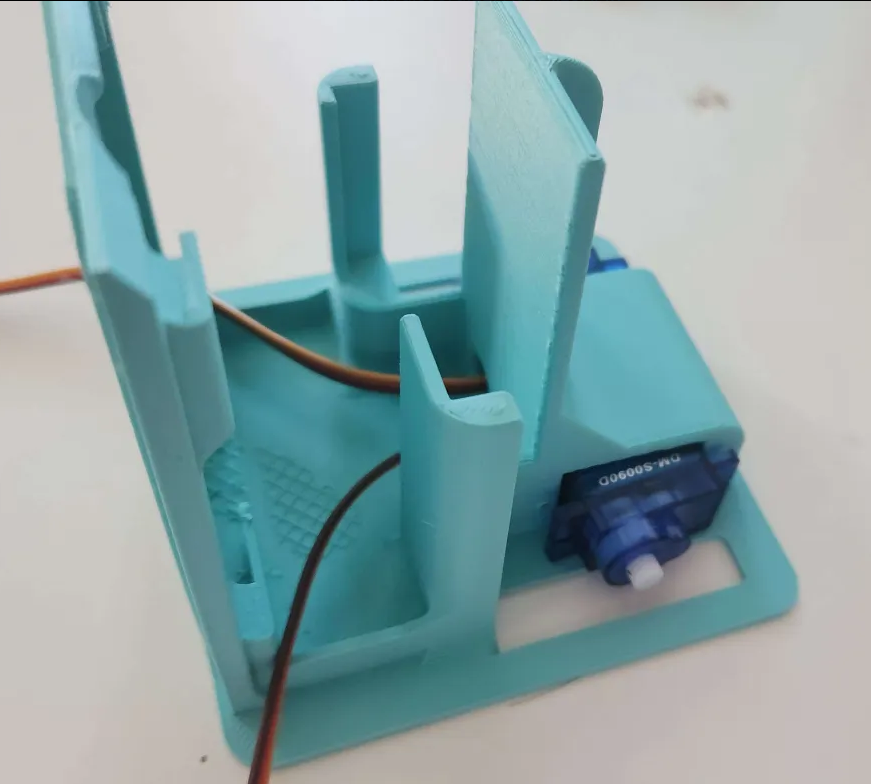
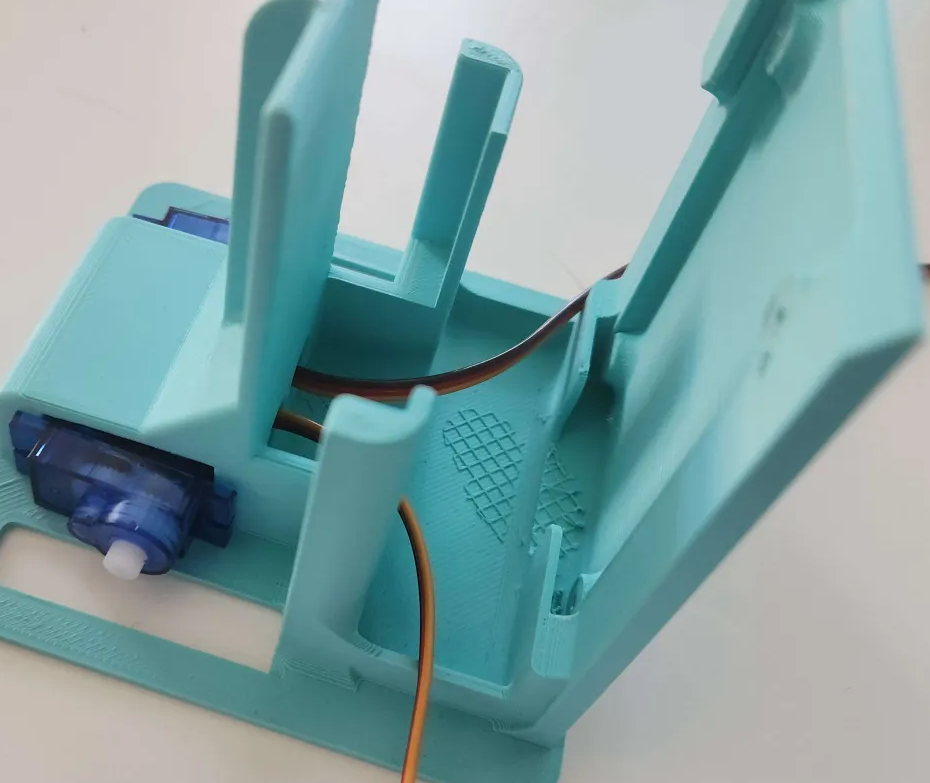
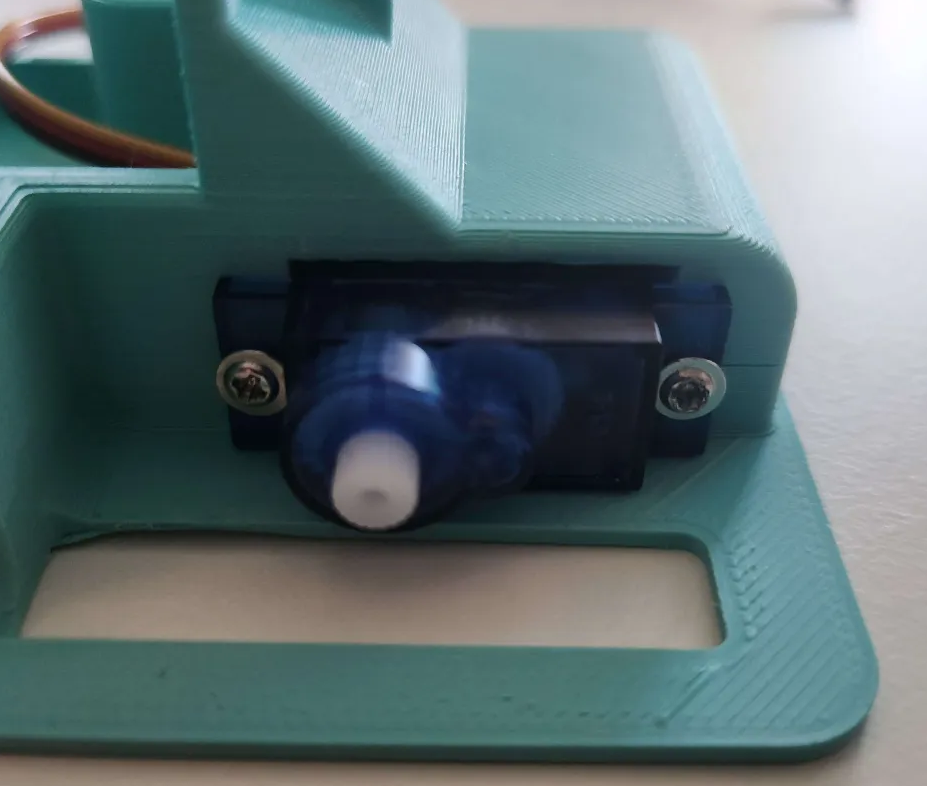
Visser les servomoteurs.
Nous allons maintenant passer au câblage du robot, car continuer le montage sans cette étape pourrait compliquer le branchement de certains composants.
Etape 2 : Câblage des Composants
Pour le câblage du LittleBot, il nous faut :
- Un Arduino Nano
- Un Sensor Shield
- Un capteur à ultrason (HC-SR04)
- 2 Servomoteurs RC 360°/ Moteur (DM-S0090D)
Le branchement ce présente comme ceci :
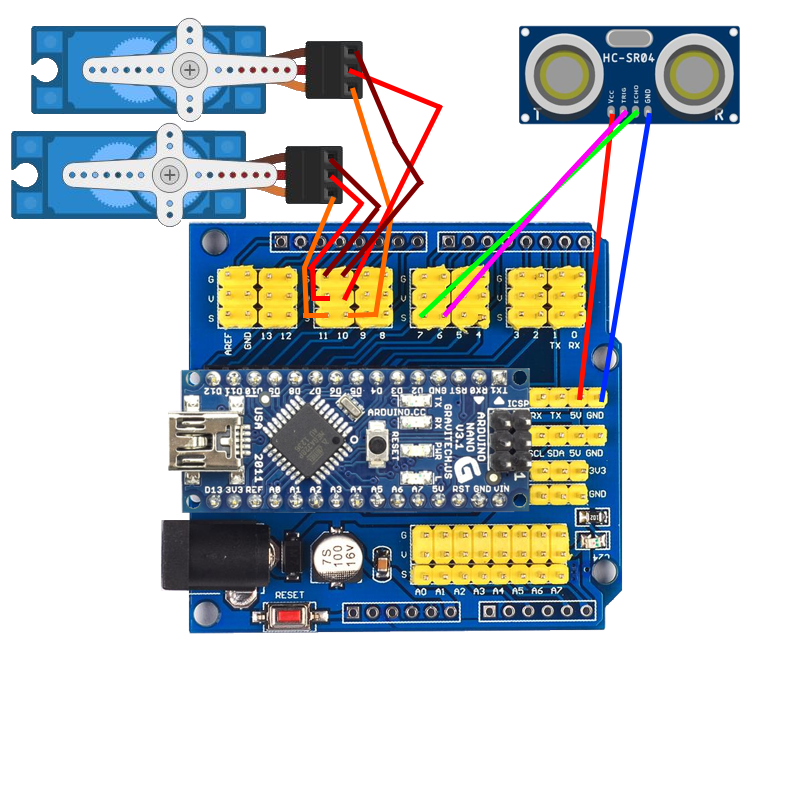
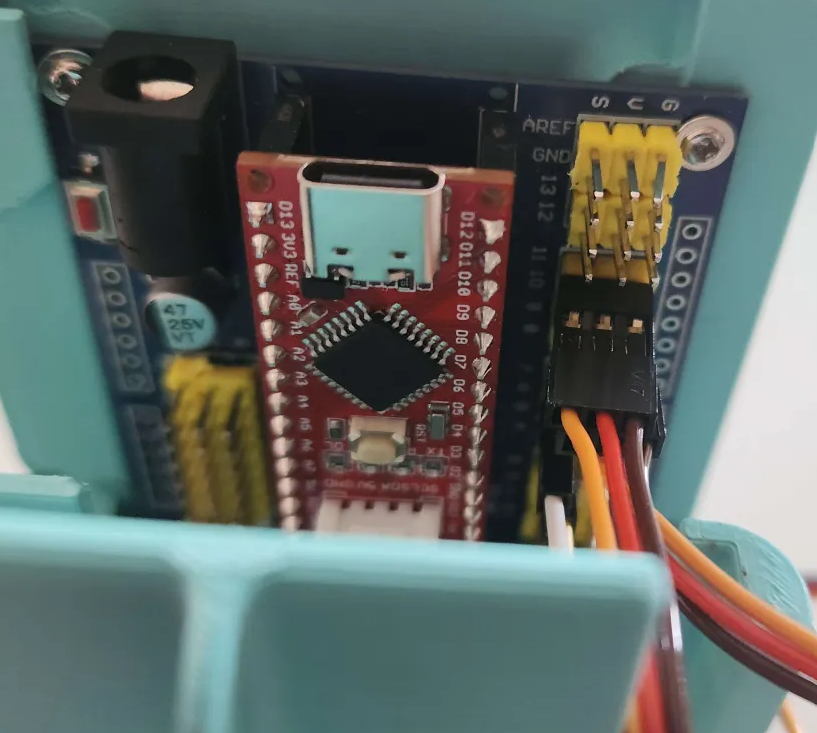
⚠️ Attention à bien vous référer aux inscription des pins pour brancher l'Arduino nano dans le bon sens (port usb vers l'extérieur du shield).
- Branchement du capteur à ultrasons (se référer au schéma du dessus) :
- VCC sur une broche 5V.
- Trig sur la broche 6.
- Echo sur la broche 7.
- GND sur une broche GND
2. Branchement des Servomoteurs RC 360° (se référer au schéma du dessus) :
- Le fil marron sur la broche G
- Le fil rouge sur la broche V
- Le fil orange sur la broche S
Ainsi le servo qui est sur la broche 10 sera notre roue droite et le Servo sur la pin 11 sera notre roue gauche.
Etape 3 : Montage du shield
Fixer le shield à la base du LittleBot avec 2 vis.
Etape 4 : Fixation des roues
Mettre les palonniers dans les roues.

Puis fixer les roues sur les servomoteurs.


Etape 5 : Finalisation du LittleBot
Mettre la batterie comme sur l'image ci-dessous et ne pas oublier de passer le câble dans le trou de la tête.
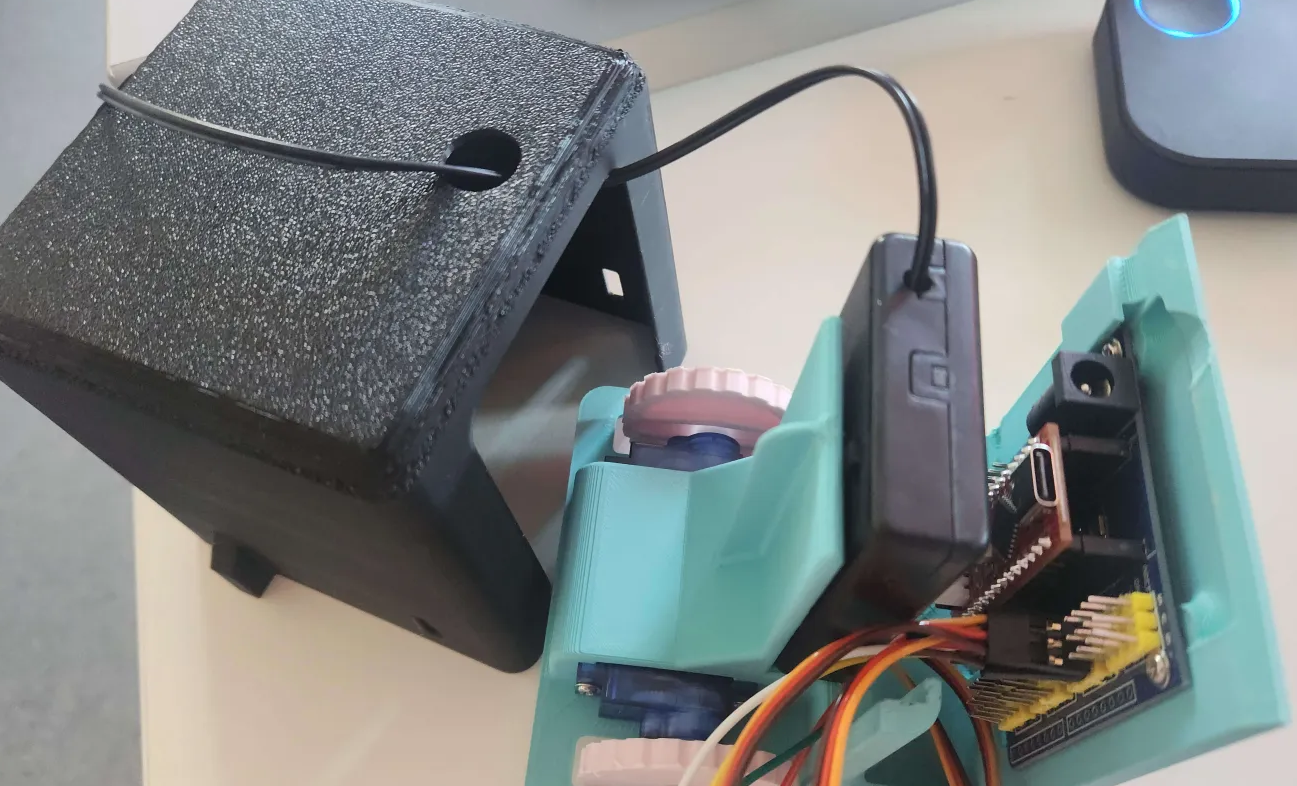
Placer le capteur ultrasons dans le tête du LittleBot

Placer la tête du LittleBot sur la base.

Passons maintenant à la programmation sur la prochaine page.
Programmation Littlebot
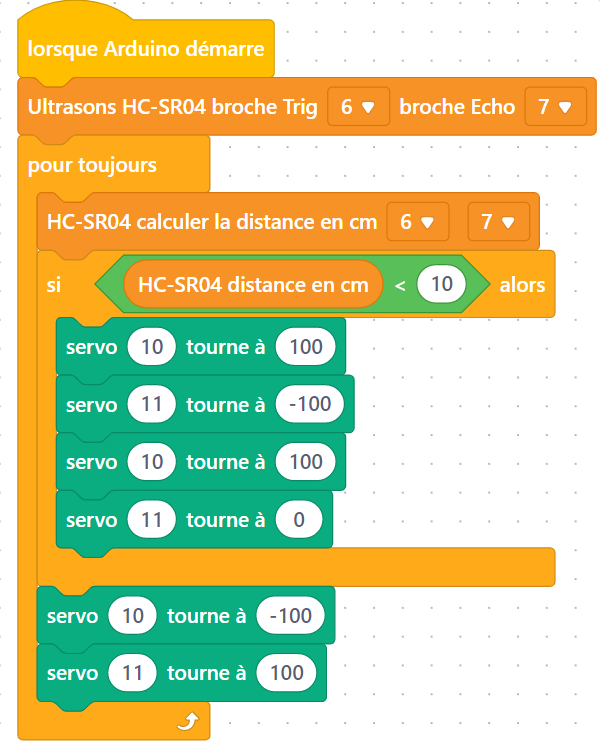
Le Programme en Mblock :
Objectifs :
Le robot doit tout le temps avancer sauf si il rencontre un obstacle à moins de 10 cm il doit reculer puis tourner vers la gauche.
Tout d'abord, ajouter les extensions que nous auront besoin, dans la barre des extensions taper "ultrasons" et ajouter l'extension (il y en aura que une) et pour la 2ème extension la voici servo.mext (cliquez dessus pour télécharger le fichier et faire un glisser-déposer du fichier sur Mblock pour importer l'extension).
Dès que les 2 extensions sont installées on peut commencer à programmer.
Mettre le bloc d'évènement pour pouvoir jouer le code.

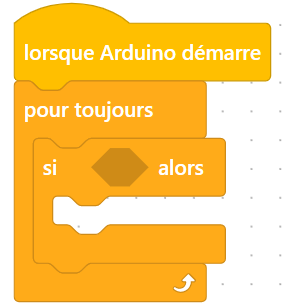
Ensuite mettre le bloc "pour toujours" pour faire une boucle infinie.
Mettre le bloc de conditions "si ... alors ...".
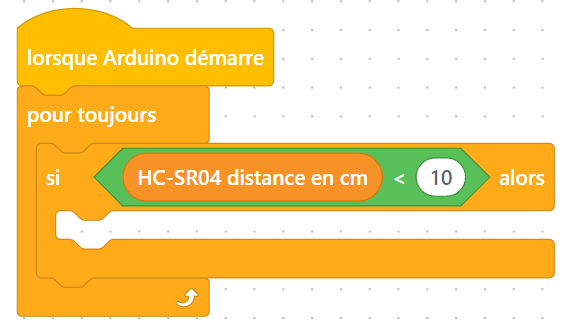
Maintenant on va réaliser la condition.
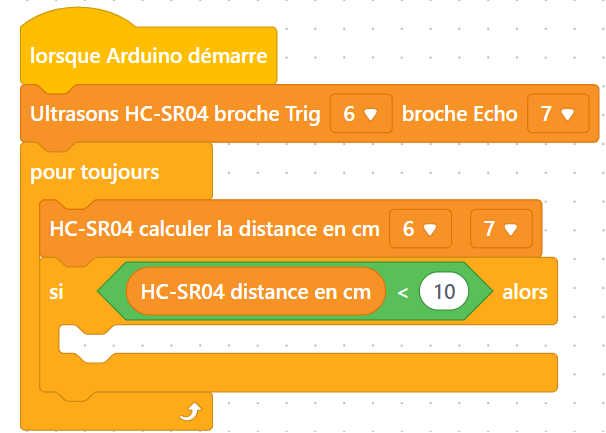
Ne pas oublier d'initialiser notre capteur de distance et de calculer la distance en continue.
Maintenant si la condition est correct alors il doit d'abord reculer puis tourner à gauche.
Les valeurs 100 et -100 sont les vitesse maximale dans un sens différent.
Rajouter les 2 dernier blocs pour que si la condition n'est pas réalisée le robot avance.
Programmation sur Arduino IDE :
Ici nous décomposerons notre programme pour bien l'écrire.
Tout d'abord, nous déclarons la librairie et les servomoteurs que nous utiliserons :
#include <Servo.h> // Inclusion de la bibliothèque Servo pour contrôler les servomoteurs
#define trigPin 6 // Attribution des pins du capteur à ultrasons
#define echoPin 7 // Attribution des pins du capteur à ultrasons
Servo servo1; // Déclaration du premier servomoteur
Servo servo2; // Déclaration du second servomoteurPuis nous déclarons sur quelles pins sont branchés notre capteur et nos servomoteurs :
void setup() {
pinMode(trigPin, OUTPUT); // Configure la broche trigPin (6) en sortie
pinMode(echoPin, INPUT); // Configure la broche echoPin (7) en entrée
servo1.attach(11); // Attribution de la broche 11 au premier servomoteur
servo2.attach(10); // Attribution de la broche 10 au deuxieme servomoteur
}Rentrons dans le vif du sujet :
void loop() {
long duration, distance; // Nous déclarons notre variable que nous retrouverons plus tard
digitalWrite(trigPin, LOW); //Ici notre capteur à ultrason est en "position 0"
delayMicroseconds(2); // Pendant 2 Microsecondes
digitalWrite(trigPin, HIGH); //Ici notre capteur à ultrason est "activé"
delayMicroseconds(10); //Pendant 10 Microsecondes
digitalWrite(trigPin, LOW); //Puis nous le retournons en position "0"
duration = pulseIn(echoPin, HIGH); // Nous déclarons notre variable "duration" qui est la durée du trajet du son.
distance = (duration*0.034) / 2; // Nous déclarons notre variables "distance" par la duréé multiplié par la vitesse du son le tout divisé par 2.
if (distance < 20) { // Nos déplacement commence ici, "Si la distance est inférieur à 20cm alors..."
servo1.writeMicroseconds(1000);//Servo Gauche tourne à l'envers
servo2.writeMicroseconds(2000);//Servo Droit tourne à l'envers
delay (2000);// pendant 2 sec
servo1.writeMicroseconds(1000);//Servo Gauche tourne à l'envers
servo2.writeMicroseconds(1500);//Arrêt du Servo Droit
delay (2000);// pendant 2 sec
}
else { //Sinon...
servo1.writeMicroseconds(2000);//Servo Gauche tourne
servo2.writeMicroseconds(1000);//Servo Droit tourne
delay (2000);// pendant 2 sec
}
}Puis nous assemblons le tout, voici à quoi cela devrait ressembler :
#include <Servo.h>
#define trigPin 6
#define echoPin 7
Servo servo1;
Servo servo2;
void setup() {
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
servo1.attach(11);
servo2.attach(10);
}
void loop() {
long duration, distance; // Nous déclarons notre variable que nous retrouverons plus tard
// Envoie une impulsion courte pour déclencher le capteur ultrasonique
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite(trigPin, HIGH); // Début de l’impulsion
delayMicroseconds(10); // Durée de l’impulsion (10µs)
digitalWrite(trigPin, LOW); // Fin de l’impulsion
// Mesure du temps entre l’émission et la réception de l’onde sonore
duration = pulseIn(echoPin, HIGH);
// Conversion de la durée en distance (en cm)
distance = (duration*0.034) / 2;
// Si un obstacle est détecté à moins de 20 cm
if (distance < 20) {
// Mouvement 1 : envoie d'un signal d'une durée 1000 µs à servo1, envoie d'un signal d'une durée 2000 µs à servo2
servo1.writeMicroseconds(1000);
servo2.writeMicroseconds(2000);
delay (2000); // Attend 2 secondes
// Mouvement 2 : servo1 reste dans sa position, envoie d'un signal d'une durée de 1500 us à servo2
servo1.writeMicroseconds(1000);
servo2.writeMicroseconds(1500);
delay (2000);// Attend 2 secondes
}
else {
// Si aucun obstacle détecté on avance normalement
servo1.writeMicroseconds(2000);
servo2.writeMicroseconds(1000);
delay (2000);
}
}
}
Animation LittleBot (2h30)
🤖 Introduction au projet – Le LittleBot
🎯 Qu’est-ce que le LittleBot ?
Le LittleBot est un petit robot éducatif que tu peux programmer toi-même !
Il est équipé de :
-
deux roues avec des servomoteurs RC 360° pour avancer, reculer ou tourner,
-
un capteur à ultrasons pour "voir" ce qu’il y a devant lui,
-
et un cerveau : une carte Arduino Nano.
🧠 À quoi sert ce projet ?
Ce projet te permet de découvrir la robotique et la programmation en t’amusant.
Tu vas apprendre à :
-
Programmer le robot avec des blocs dans mBlock (comme des LEGO numériques),
-
Contrôler les roues du robot,
-
Utiliser un capteur pour éviter les obstacles,
-
Faire un robot autonome, comme un vrai petit véhicule intelligent !
🟨 Étape 1 – Découverte de mBlock
🧩 1. Présentation de mBlock
mBlock est un logiciel de programmation qui utilise des blocs colorés qu’on assemble comme des briques de LEGO.
Il est basé sur Scratch, mais adapté pour programmer des robots comme le LittleBot.
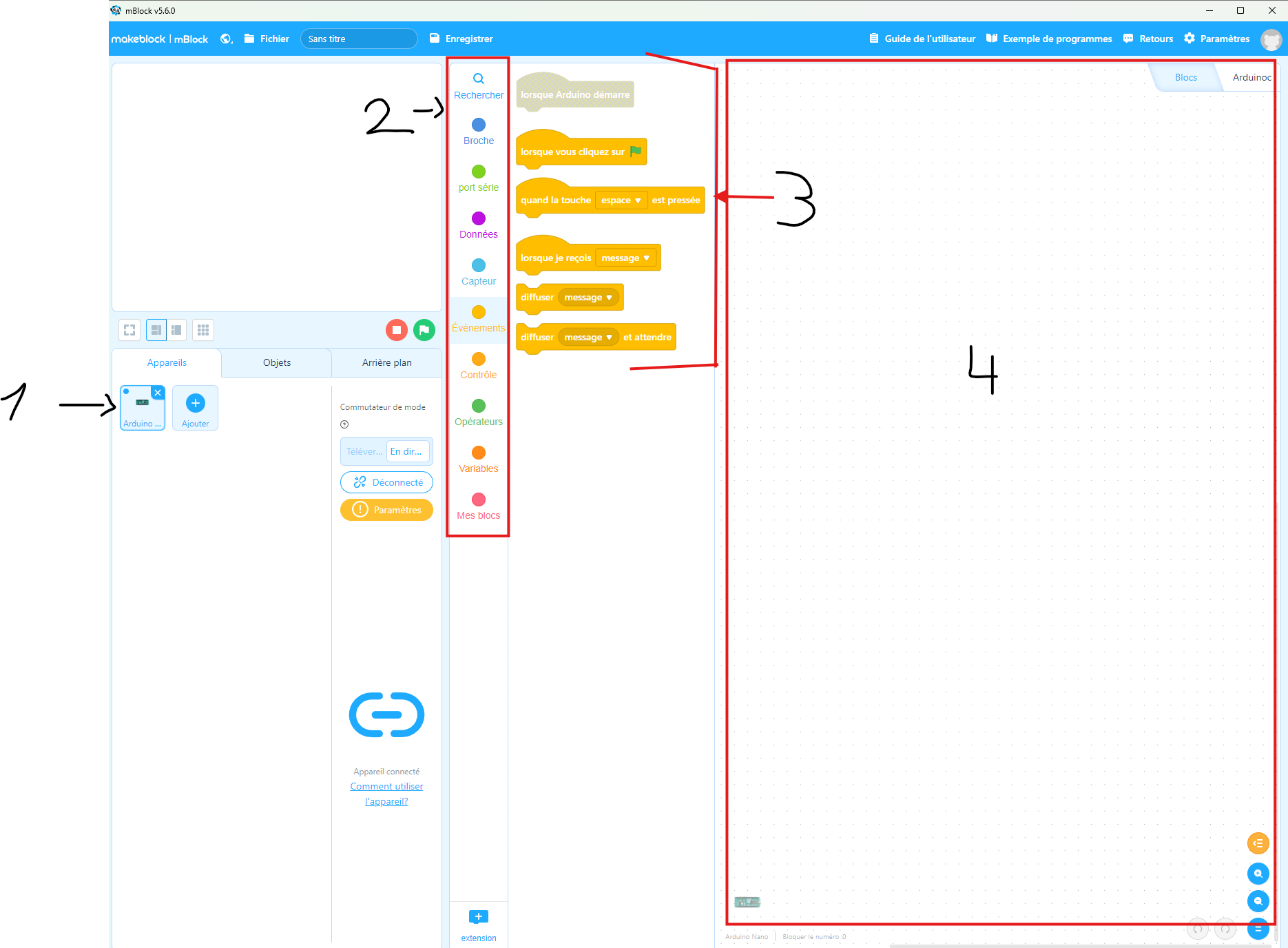
1) Appareil que nous programmons, ici nous sommes avec un Arduino nano
2) Catégorie de bloc de programmation
3) Bloc de programmation (à glisser dans l'interface de dépôt de bloc pour la programmation)
4) Interface de dépôt de bloc pour la programmation
🟩 Étape 2 – Qu’est-ce qu’un Arduino Nano ?
🧠 C’est quoi un Arduino Nano ?
Un Arduino Nano est une petite carte électronique :

C’est le « cerveau » du robot.
Il reçoit des instructions depuis l’ordinateur (grâce à mBlock), et il contrôle les moteurs et les capteurs du robot…
Dans le LittleBot, l’Arduino Nano permet de :
-
Lire les informations du capteur à ultrasons (ex : distance),
-
Contrôler les servomoteurs,
-
Exécuter des actions (avancer, reculer, s’arrêter…).
🧠 On peut dire que tu écris un programme avec mBlock et que l’Arduino le suit à la lettre.
🟦 Étape 3 – Qu’est-ce qu’un servomoteur RC 360° ?
🔄 Qu’est-ce qu’un servomoteur RC 360° ?
Un servomoteur RC 360° (ou « continu ») est un petit moteur qui peut tourner en continu dans les deux sens (comme une roue), contrairement aux servos classiques qui ne tournent que sur un angle limité (en général 180° maximum).
⚙️ À quoi ça sert dans un robot comme le LittleBot ?
Dans le LittleBot, ces servos sont utilisés pour faire tourner les roues du robot. En envoyant des signaux différents, on peut :
-
Faire avancer le robot (les deux roues tournent en avant),
-
Faire reculer le robot (les deux roues tournent en arrière),
-
Faire tourner (une roue avance, l’autre recule ou reste fixe).
🎛️ Comment on contrôle la vitesse et le sens ?
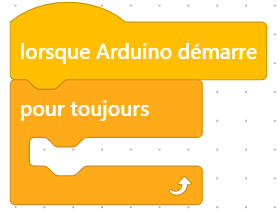
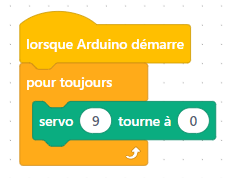
Pour commencer un programme, on commence toujours par le bloc 'lorsque Arduino démarre'
Ensuite, on va indiquer à l'Arduino nano que l'on veut que notre programme fonctionne tout le temps grâce au bloc 'pour toujours' dans la catégorie 'Contrôle'.

Et maintenant, nous allons faire fonctionner notre servomoteur. Allez dans la catégorie 'Servo360' et prendre le bloc 'servo 9 tourne à 0'.
Comment fonctionne ce bloc ?
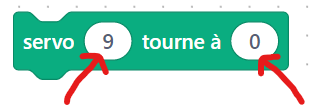
Numéro de broche vitesse du servomoteur, dans un sens entre [-100 et 0[ et dans l'autre entre ]0 et 100]). A 0 on est donc à l'arrêt
Attention ce bloc ne contrôle qu'un seul moteur, nos servomoteurs sont branchés sur les broches numéros 10 et 9.
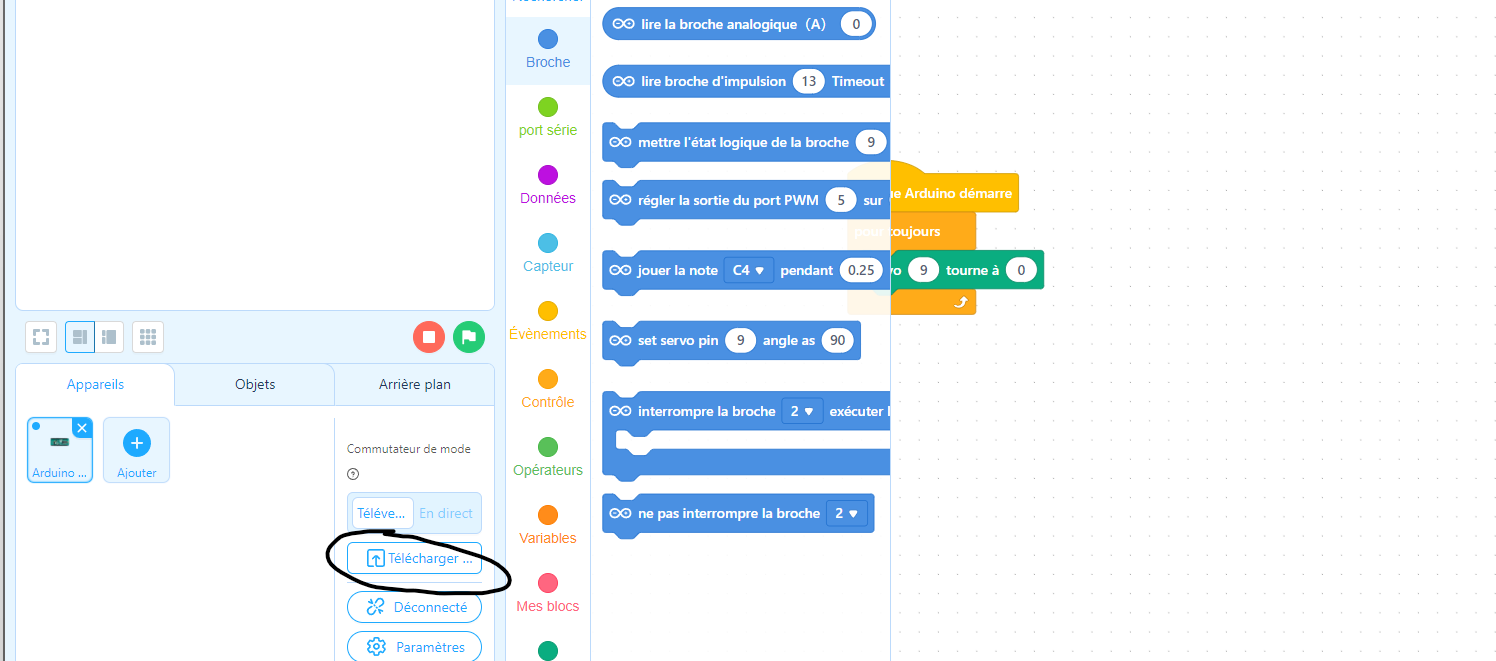
Comment téléverser le code dans l'arduino nano?
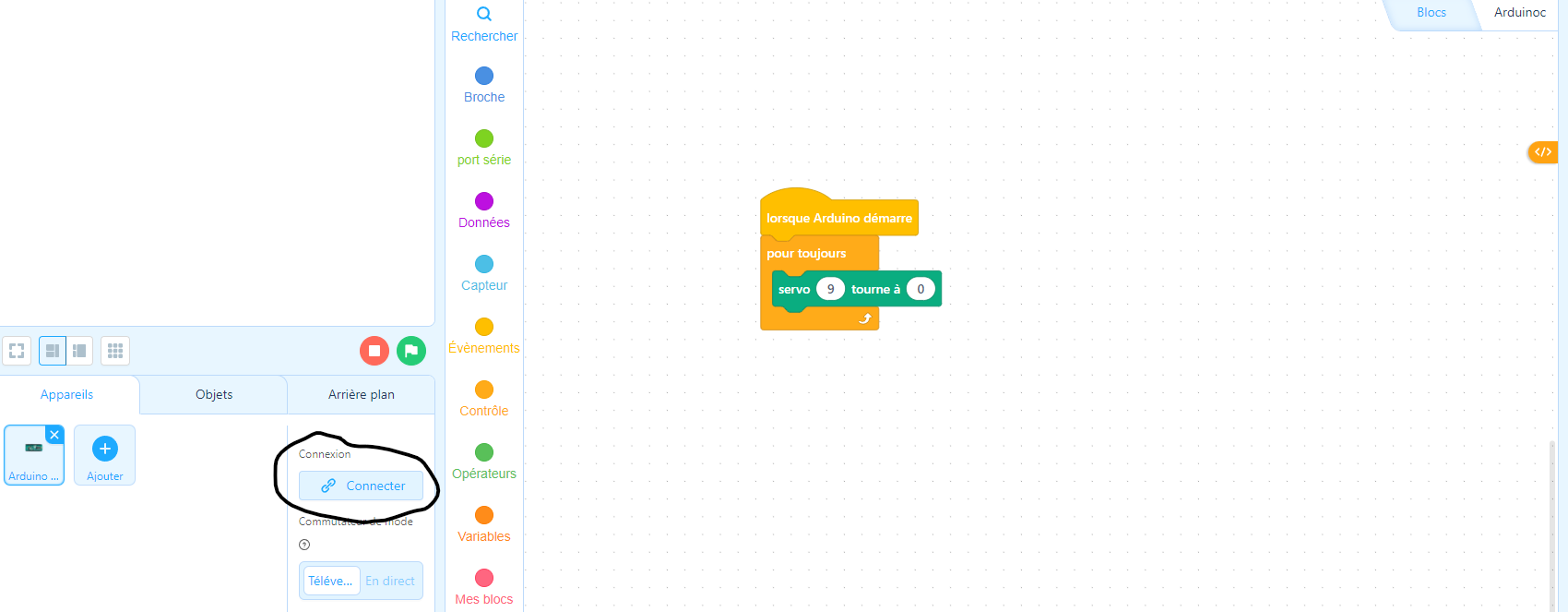
Sélectionner un appareil disponibles, si le programme ne se téléverse pas vous n'aurez cas vous déconnecter de l'appareil que vous avez choisis et essayer avec un autre. Cliquer sur 'Connecter' puis 'Télécharger le code'.

Chaque exercice est à faire valider par un animateur
Exercice n°1 :
Faire bouger les deux servomoteurs
Exercice n°2 :
Faire bouger les deux servomoteurs dans le même sens afin que le robot aille vers l'avant
Exercice n°3 :
Faire avancer le robot pendant quelques secondes, et le faire faire revenir.
🛑 Étape 4 : Détecter un obstacle avec le capteur à ultrasons
📡 Qu’est-ce qu’un capteur à ultrasons ?
Le capteur à ultrasons permet au robot de "voir" ce qu’il y a devant lui… sans yeux 👀 !
🟠 Il envoie un son très aigu (inaudible pour nous) et mesure le temps que met l’écho à revenir.
👉 Plus l’écho revient vite, plus l’objet est proche.
👉 Plus il met du temps, plus l’objet est loin.
Dans un premier temps nous allons apprendre à utiliser le capteur à ultrasons.
Allez faire un tour sur cette page ! : (ne pas réaliser la partie câblage ni le code en C avec arduino IDE)
https://innovation.iha.unistra.fr/books/robotique-educative/page/quest-ce-quun-capteur-a-ultrasons
Maintenant que vous savez utilisez le capteur à ultrasons, passons à la suite.
Nouveaux blocs utilisables :
- Les conditions :
🧠 Les blocs de condition permettent au robot de prendre des décisions.
Comme dans la vie de tous les jours :
👉 "S’il pleut, je prends mon parapluie."
En programmation, c’est pareil :
👉 "Si un obstacle est devant moi, je m’arrête."

- Les opérations :
🧠 Les blocs d’opérations servent à faire des calculs ou des comparaisons.

A vous de choisir les blocs les plus pertinents et les essayer ! N'oubliez pas tout les blocs que vous avez vue depuis le début de l'animation !
Exercice n°4 :
Programmer le Littlebot pour faire en sorte qu'il s'arrête lorsqu'il croise un obstacle à moins de 10 cm de lui
🚗 Étape 5 : Esquiver un obstacle
Exercice n°5 :
Maintenant que le Littlebot arrive à s'arrêter lorsqu'il croise un obstacle, faites en sorte qu'il l'esquive comme le ferait un robot aspirateur!