Club Robotique - Voiture RC
- Description du projet
- Moteur CC - Principe de fonctionnement
- Moteur CC - Commande de moteur à courant continu
- Moteur CC - Contrôler la vitesse avec une roue encodeuse
- Le module Bluetooth HC-05
- RC Car - Voiture modélisme radiocommandée
- Code voiture RC
Description du projet
Introduction
Pour ce cycle, nous allons créer une voiture contrôlable avec notre smartphone
Compétences techniques et mécaniques
-
Assemblage de pièces mécaniques : Les élèves apprendront à assembler une structure mobile en fixant des moteurs, roues, châssis et autres composants physiques.
-
Transmission et mouvement : Comprendre comment le mouvement des moteurs se traduit en déplacement des roues et en direction du véhicule.
-
Résolution de problèmes pratiques : Adapter ou modifier le montage mécanique en cas de désalignement, d’instabilité ou de contraintes physiques.
-
Utilisation d’outils simples : Utiliser des tournevis, pinces et autres petits outils pour fixer les composants.
Compétences en électronique
-
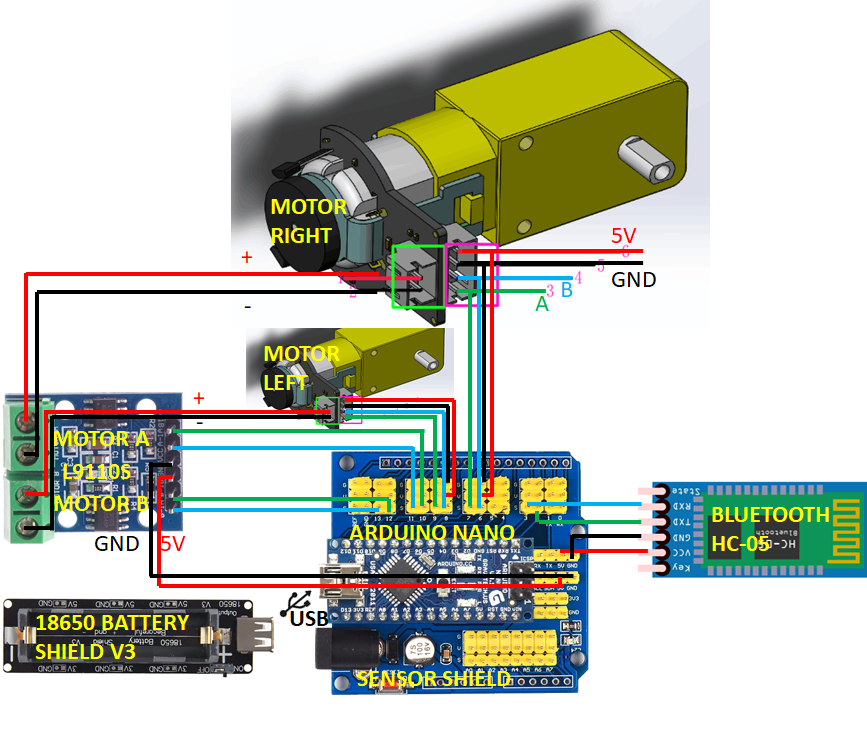
Câblage et connexion de composants : Relier correctement les moteurs, le module Bluetooth, le module de contrôle moteur et l’Arduino Nano en respectant les schémas électroniques qu'ils auront réalisés.
-
Compréhension des circuits de base : Identifier les entrées/sorties, l'alimentation, la masse, et comprendre le rôle de chaque module.
-
Utilisation de capteurs pour asservir des moteurs : Grâce aux encodeurs intégrés dans les moteurs, les élèves apprennent comment mesurer la vitesse ou la position d’un moteur afin de synchroniser deux moteurs pour qu'ils aillent à la même vitesse.
-
Sécurité électronique : Apprendre à manipuler des composants électroniques sans les endommager et à vérifier les connexions pour éviter les courts-circuits.
Compétences en programmation
-
Écriture de programmes Arduino (langage C/C++) : Les collégiens apprendront à écrire des programmes simples pour contrôler les moteurs selon des consignes reçues via Bluetooth.
-
Communication série : Compréhension de la communication entre le smartphone et l’Arduino via le module HC-05.
-
Lecture des capteurs : Exploiter les données des encodeurs pour améliorer la précision du mouvement (vitesse, distance, etc.).
-
Organisation et logique du code : Structuration du code en fonctions, boucles, conditions, et apprentissage de la logique algorithmique pour la commande du véhicule.
Compétences transversales
-
Travail en équipe : Collaboration pour répartir les tâches (mécanique, câblage, codage, documentation).
-
Gestion de projet : Planification des étapes, gestion du temps, anticipation des besoins matériels.
-
Communication et documentation : Rédiger un dossier technique clair, expliquer leur démarche, et présenter leur projet à d'autres.
-
Créativité et innovation : Personnalisation de la voiture, ajout de fonctionnalités (phares, klaxon, application mobile plus évoluée).
-
Résolution de problèmes : Développer une capacité à identifier des dysfonctionnements et à tester des solutions.
Description du déroulé des séances:
~9 séances :
- Introduction du projet (brainstorming)
- ~3 séances sur TinkerCAD et sur l'impression 3D (modification de certaines pièces de la voiture)
- ~1 séance sur l'actionneur : servomoteur RC 360°(déplacement)
- ~1 séance sur le capteur : ultrason (distance)
- ~1 séance sur le couplage capteur moteur
- ~1 séance sur l'assemblage du LittleBot
- ~2 séances sur la programmation du LittleBot
Matériel
Projet inspiré de : https://www.thingiverse.com/thing:2417739
- 1 x Arduino Nano ou compatible (seeeduino, funduino,...) : ~10€
- 1 x câble USB C : ~1€
- 1 x Sensor Shield pour Arduino Nano : ~3€
- 2 x servomoteur à rotation 360° (DM-S0090D-R 9g/0.08s/1.6kg.cm) : ~2€
- 1 x Module ultrason (HC-SR04) : ~2€
- 2 x élastique pour les roues
- 1 x porte pile 4xaa : ~2€
- Une imprimante 3D pour imprimer les pièces du robot (fichier disponible à la prochaine page)(~5€ de filament) :
Moteur CC - Principe de fonctionnement
Explication du moteur à courant continue :
https://www.youtube.com/watch?v=JV50zqHvqAM&list=PLKLRexlzHZepqmJXVM3Kq52xCRRqlOZ0H
Câblage et programmation avec Module L9110S :
https://www.robot-maker.com/shop/blog/32_Utilisation-des-encodeurs.html
Câblage et programmation sans Module L9110D :
https://wiki.dfrobot.com/Micro_DC_Motor_with_Encoder-SJ01_SKU__FIT0450
Moteur CC - Commande de moteur à courant continu
Moteur à courant continu "moteur jaune"
https://seafile.unistra.fr/d/16f415226d224af5bd8f/
\Seafile\Reseau_FabLab_Alsace_Nord\01_Robotique_Educative
Module de contrôle L9110S
Montage :

https://arduino.blaisepascal.fr/controleur-l9110s/
#define moteurA_1 5
#define moteurA_2 6
#define moteurB_1 10
#define moteurB_2 11
int vitesseA = 255; // 0 à 255
int vitesseB = 255; // 0 à 255
void setup() {
// Configuration des ports en mode "sortie"
pinMode(moteurA_1, OUTPUT);
pinMode(moteurA_2, OUTPUT);
pinMode(moteurB_1, OUTPUT);
pinMode(moteurB_2, OUTPUT);
}
void loop() {
digitalWrite(moteurA_1, LOW);
analogWrite(moteurA_2, vitesseA);
digitalWrite(moteurB_1, LOW);
analogWrite(moteurB_2, vitesseB);
delay(2000);
analogWrite(moteurA_1, vitesseA);
digitalWrite(moteurA_2, LOW);
analogWrite(moteurB_1, vitesseB);
digitalWrite(moteurB_2, LOW);
delay(2000);
digitalWrite(moteurA_1, LOW);
digitalWrite(moteurA_2, LOW);
digitalWrite(moteurB_1, LOW);
digitalWrite(moteurB_2, LOW);
delay(3000);
}Module de contrôle L298
Attention le module entraîne une chute de tension d'environ 3V. Donc si vous voulez délivrer 5V à vos moteurs à courant continu il faudra une alimentation de 8V.
https://arduino.blaisepascal.fr/pont-en-h-l298n/
// Pont en H L298N
//Ports de commande du moteur B
int motorPin1 = 10;
int motorPin2 = 11;
int enablePin = 5;
// Vitesse du moteur
int state = 55;
void setup() {
// Configuration des ports en mode "sortie"
pinMode(motorPin1, OUTPUT);
pinMode(motorPin2, OUTPUT);
pinMode(enablePin, OUTPUT);
// Initialisation du port série
Serial.begin(9600);
}
void loop() {
if (Serial.available() > 0)
{
// Lecture de l'entier passé au port série
state = Serial.parseInt();
//
// Sens du mouvement
//
if (state > 0) // avant
{
digitalWrite(motorPin1, HIGH);
digitalWrite(motorPin2, LOW);
Serial.print("Avant ");
Serial.println(state);
}
else if (state < 0) // arrière
{
digitalWrite(motorPin1, LOW);
digitalWrite(motorPin2, HIGH);
Serial.print("Arriere ");
Serial.println(state);
}
else // Stop (freinage)
{
digitalWrite(motorPin1, HIGH);
digitalWrite(motorPin2, HIGH);
Serial.println("Stop");
}
//
// Vitesse du mouvement
//
analogWrite(enablePin, abs(state));
}
delay(100);
}PWM
https://arduino.blaisepascal.fr/conversion-numeriqueanalogique-pwm/
Moteur CC - Contrôler la vitesse avec une roue encodeuse
Utilisation des encodeurs
https://wiki.dfrobot.com/Micro_DC_Motor_with_Encoder-SJ01_SKU__FIT0450
- Installer Arduino PID depuis le gestionnaire de librairies

//source Sample Code 2 https://wiki.dfrobot.com/Micro_DC_Motor_with_Encoder-SJ01_SKU__FIT0450#target_3
//The sample code for driving one way motor encoder
#include <PID_v1.h>
const byte encoder0pinA = 2;//A pin -> the interrupt pin 0
const byte encoder0pinB = 3;//B pin -> the digital pin 3
// int E_left =5; //The enabling of L298PDC motor driver board connection to the digital interface port 5
// int M_left =4; //The enabling of L298PDC motor driver board connection to the digital interface port 4
int MOTEUR_A_1 =5; //Connexion du pilote de moteur CC l9110s au port digital 5
int MOTEUR_A_2 =6; //Connexion du pilote de moteur CC l9110s au port digital 6
byte encoder0PinALast;
double duration,abs_duration;//the number of the pulses
boolean Direction;//the rotation direction
boolean result;
double val_output;//Power supplied to the motor PWM value.
double Setpoint;
double Kp=0.6, Ki=5, Kd=0;
PID myPID(&abs_duration, &val_output, &Setpoint, Kp, Ki, Kd, DIRECT);
void setup()
{
Serial.begin(9600);//Initialize the serial port
pinMode(MOTEUR_A_1, OUTPUT); //L298P Control port settings DC motor driver board for the output mode
pinMode(MOTEUR_A_2, OUTPUT);
Setpoint =80; //Set the output value of the PID
myPID.SetMode(AUTOMATIC);//PID is set to automatic mode
myPID.SetSampleTime(100);//Set PID sampling frequency is 100ms
EncoderInit();//Initialize the module
}
void loop()
{
advance();//Motor Forward
abs_duration=abs(duration);
result=myPID.Compute();//PID conversion is complete and returns 1
if(result)
{
Serial.print("Pluse: ");
Serial.println(duration);
duration = 0; //Count clear, wait for the next count
}
}
void EncoderInit()
{
Direction = true;//default -> Forward
pinMode(encoder0pinB,INPUT);
attachInterrupt(0, wheelSpeed, CHANGE);
}
void wheelSpeed()
{
int Lstate = digitalRead(encoder0pinA);
if((encoder0PinALast == LOW) && Lstate==HIGH)
{
int val = digitalRead(encoder0pinB);
if(val == LOW && Direction)
{
Direction = false; //Reverse
}
else if(val == HIGH && !Direction)
{
Direction = true; //Forward
}
}
encoder0PinALast = Lstate;
if(!Direction) duration++;
else duration--;
}
void advance()//Motor Forward
{
digitalWrite(MOTEUR_A_1,LOW);
analogWrite(MOTEUR_A_2,val_output);
}
void back()//Motor reverse
{
digitalWrite(MOTEUR_A_1,HIGH);
analogWrite(MOTEUR_A_2,val_output);
}
void Stop()//Motor stops
{
digitalWrite(MOTEUR_A_2, LOW);
}Avec la librairie Motor PID
https://github.com/natnqweb/Motor_PID
Interruptions
https://www.best-microcontroller-projects.com/arduino-interrupt.html
https://forum.arduino.cc/t/solved-arduino-nano-and-interrupt-on-pin-6/1090623/3
Sources
https://www.robot-maker.com/shop/blog/32_Utilisation-des-encodeurs.html
Le module Bluetooth HC-05
Test et configuration du module
- Suivre les instructions pour le module HC-05, qui peut être configuré en module maître ou esclave. Le module HC-06 lui ne peut être que esclave, mais il est plus simple à configurer.
https://www.aranacorp.com/fr/votre-arduino-communique-avec-le-module-hc-05/
- On peut communiquer avec le module bluetooth HC-05 via la liaison série de l'Arduino Nano
- Se renseigner sur ce qu'est une liaison série, par ex. ici : https://arduino.blaisepascal.fr/bibliotheque-serial/
- Réaliser le câblage entre l'Arduino Nano et le module bluetooth HC-05
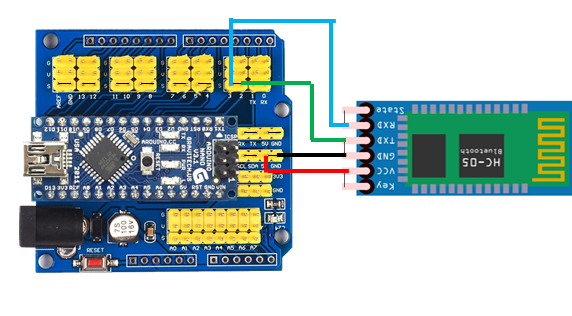
- Bien vérifier que le Pin qui Reçoit les données sur l'Arduino (RxDpin) soit connecté au Pin du HC-05 qui Tansmet (TxDpin). Et vice-versa, donc chaque câble transmet les données dans une direction opposée.
-
Si on prend les Pins RX (Digital 0) et TX (Digital 1) de l'arduino pour connecter RXD et TXD du HC-05, cela rentre en conflit avec la connexion USB entre l'arduino et le PC.
-
Donc on prend les Pins Digital 2 et 3 et on utilise la bibliothèque
SoftwareSerial
//Test et Configuration du module Bluetooth HC-05
//Le port série matériel de l'Arduino Nano (Pins 0/RX et 1/TX) est déjà utilisé pour la liaison Arduino-USB avec l'ordinateur
//On utilise donc une liaison série logicielle pour la liaison Arduino-HC05 avec le module Bluetooth
#include <SoftwareSerial.h> //Software Serial Port
#define RxDpin 2 //Pin Digital 2 pour arduino Rx (pin0=serial)
#define TxDpin 3 //Pin Digital 3 pour arduino Tx (pin1)
//Pour la liaison SoftwareSerial Arduino-HC05, quand on veut configurer le HC-05
//on maintient le bouton à côté de la PIN EN/KEY enfoncé au démarrage de l'Arduino
#define baudrate 38400 //Vitesse pour la liaion Arduino-HC05 en mode configuration
//Pour la liaison SoftwareSerial Arduino-HC05, quand on veut communiquer à travers le bluetooth depuis un smartphone,
//on appaire le HC-05 depuis l'appli avec le mot-de-passe par défaut : 1234
// #define baudrate 9600 //Vitesse pour la liaion Arduino-HC05 en mode utilisation smartphone
SoftwareSerial BTSerie(RxDpin,TxDpin);
char caractereTexte;
String phraseTexte;
void setup()
{
Serial.begin(9600); //Vitesse (baudRate) pour la liaison Arduino-USB
delay(500);
Serial.println("En mode communication USB - Pret pour les commandes AT");
Serial.println("Le HC-05 doit clignoter lentement (2 secondes)");
//Configuration de la liaison SoftwareSerial avec le HC-05
pinMode(RxDpin, INPUT); //Configuration du Pin RxD (Receive) en mode entrée
pinMode(TxDpin, OUTPUT); //Configuration du Pin TxD (Transmit) en mode sortie
BTSerie.begin(baudrate); //Vitesse pour la liaion Arduino-HC05
if (baudrate==38400) {
Serial.println("En mode communication USB - Pret pour les commandes AT");
Serial.println("Le HC-05 doit clignoter lentement (2 secondes)");
}
else if (baudrate==9600){
Serial.println("En mode smartphone - Pret pour être appairé");
Serial.println("Le HC-05 doit clignoter rapidement avant d'être appairé");
}
else{
Serial.println("La vitesse de communication (baudrate) a été personnalisée");
}
delay(500);
// Commandes AT pour le HC-05
// BTSerie.print("AT+NAME?"); //Demande le nom du module. Noter le ?
// BTSerie.print("AT+NAME=RCcar-HC-05-1"); //Définir le nom du module.
BTSerie.print("AT+VERSION?"); //Demande le N° de version. Noter le ?
// BTSerie.print("AT+UART?"); //Demande la vitesse série (baudrate). Noter le ?
// BTSerie.print("AT+UART=57600,0,0"); //Définir la vitesse série (baudrate).
// BTSerie.print("AT+ROLE?"); //Demande le mode du module, maitre ou esclave. Noter le ?
// BTSerie.print("AT+PSWD?"); //Demande le mot-de-passe du module. Noter le ?
// La console série de l'ordinateur d'où l'on envoie les commandes AT doit être réglée de telle sorte que
// les fins de ligne soient « les deux, NL et CR », ce qui revient à envoyer \r\n à la fin de chaque commande.
BTSerie.print("\r\n"); // sur HC-05, toutes les commandes doivent se terminer par \r\n
// afficher ce que le module bluetooth répond
Serial.print( BTSerie.read() ); // afficher sur la console ce qui est lu sur BT
// pour AT+VERSION?, c'est le n° de version puis OK qui s'affiche
void loop(){
//On lit ce qui est envoyé à l'Arduino depuis la console via la liaison Serial
readSerialPort();
//Et on l'Arduino l'envoie au HC-05 via la liaison SoftwareSerial
if(phraseTexte!="") BTSerie.println(phraseTexte);
//L'Arduino lit ce que le HC-05 envoie via la liaison SoftwareSerial et l'envoie vers la console
if (BTSerie.available()>0){
Serial.write(BTSerie.read());
}
}
void readSerialPort(){
phraseTexte="";
while (Serial.available()) {
delay(10);
if (Serial.available() >0) {
caractereTexte = Serial.read(); //le port série envoie des caractères de texte octet par octet (byte from serial buffer)
phraseTexte += caractereTexte; //construction d'une phrase en concaténant les caractères reçus
}
}
}Pilotage d'un moteur CC via bluetooth
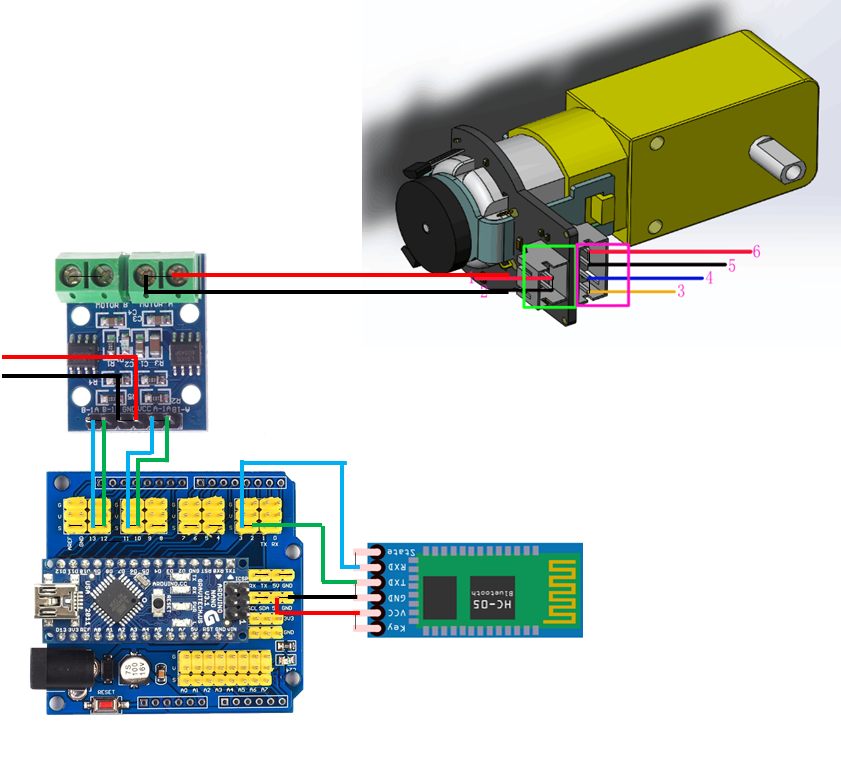
//Voiture modélisée radiocommandée (RC car) avec deux moteurs CC à l'arrière et un servomoteur de direction
#include <Servo.h>
Servo myservo; // create servo object to control a servo
//Le port série matériel de l'Arduino Nano (Pins 0/RX et 1/TX) est déjà utilisé pour la liaison Arduino-USB avec l'ordinateur
//On utilise donc une liaison série logicielle pour la liaison Arduino-HC05 avec le module Bluetooth
#include <SoftwareSerial.h> //Software Serial Port
#define RxDpin 2 //Pin Digital 2 pour arduino Rx (pin0=serial)
#define TxDpin 3 //Pin Digital 3 pour arduino Tx (pin1)
//Pour la liaison SoftwareSerial Arduino-HC05, quand on veut configurer le HC-05
//on maintient le bouton à côté de la PIN EN/KEY enfoncé au démarrage de l'Arduino
// #define baudrate 38400 //Vitesse pour la liaion Arduino-HC05 en mode configuration
//Pour la liaison SoftwareSerial Arduino-HC05, quand on veut communiquer à travers le bluetooth depuis un smartphone,
//on appaire le HC-05 depuis l'appli avec le mot-de-passe par défaut : 1234
#define baudrate 9600 //Vitesse pour la liaion Arduino-HC05 en mode utilisation smartphone
SoftwareSerial BTSerie(RxDpin,TxDpin);
char caractereTexte;
String phraseTexte;
void setup()
{
Serial.begin(9600); //Vitesse (baudRate) pour la liaison Arduino-USB
delay(500);
//Configuration de la liaison SoftwareSerial avec le HC-05
pinMode(RxDpin, INPUT); //Configuration du Pin RxD (Receive) en mode entrée
pinMode(TxDpin, OUTPUT); //Configuration du Pin TxD (Transmit) en mode sortie
BTSerie.begin(baudrate); //Vitesse pour la liaion Arduino-HC05
if (baudrate==38400) {
Serial.println("En mode communication USB - Pret pour les commandes AT");
Serial.println("Le HC-05 doit clignoter lentement (2 secondes)");
}
else if (baudrate==9600){
Serial.println("En mode smartphone - Pret pour être appairé");
Serial.println("Le HC-05 doit clignoter rapidement avant d'être appairé");
}
else{
Serial.println("La vitesse de communication (baudrate) a été personnalisée");
}
delay(500);
pinMode(13,OUTPUT); //left motors forward
pinMode(12,OUTPUT); //left motors reverse
pinMode(11,OUTPUT); //right motors forward
pinMode(10,OUTPUT); //right motors reverse
pinMode(9,OUTPUT); //Led
pinMode(5,OUTPUT); //SG90 steering motor
myservo.attach(5); // attaches the servo on pin 5 to the servo object
}
void loop() {
// Serial.write(blueToothSerial.read());
//On lit caractere par caractere sur la liaion Arduino-USB et on affiche sur la liaison Arduino-HC05
if (Serial.available()) {
caractereTexte = Serial.read();
BTSerie.write(caractereTexte);
// Serial.println("Caractere envoye vers bluetooth : ");
// Serial.println(caractereRecu);
}
//On lit caractere par caractere sur la liaion Arduino-HC05 et on affiche sur la liaison Arduino-USB
if (BTSerie.available()) {
caractereTexte = BTSerie.read();
Serial.print(caractereTexte);
// }
if(caractereTexte == 'F'){ //move forward(all motors rotate in forward direction)
digitalWrite(10,LOW);
digitalWrite(12,LOW);
digitalWrite(13,HIGH);
digitalWrite(11,HIGH);
// myservo.write(90); // sets the servo position according to the scaled value
}
else if(caractereTexte == 'B'){ //move reverse (all motors rotate in reverse direction)
digitalWrite(13,LOW);
digitalWrite(11,LOW);
digitalWrite(12,HIGH);
digitalWrite(10,HIGH);
// myservo.write(90); // sets the servo position according to the scaled value
}
else if(caractereTexte == 'L'){ //turn right (left side motors rotate in forward direction, right side motors doesn'caractereRecu rotate)
digitalWrite(10,LOW);
digitalWrite(12,LOW);
digitalWrite(13,LOW);
digitalWrite(11,HIGH);
// myservo.write(60); // sets the servo position according to the scaled value
}
else if(caractereTexte == 'R'){ //turn left (right side motors rotate in forward direction, left side motors doesn'caractereRecu rotate)
digitalWrite(10,LOW);
digitalWrite(12,LOW);
digitalWrite(11,LOW);
digitalWrite(13,HIGH);
// myservo.write(120); // sets the servo position according to the scaled value
}
else if(caractereTexte == 'S'){ //STOP (all motors stop)
digitalWrite(13,LOW);
digitalWrite(12,LOW);
digitalWrite(11,LOW);
digitalWrite(10,LOW);
// myservo.write(90);
}
delay(100);
}
}
Depuis le clavier de PC
Depuis une application bluetooth de smartphone Android
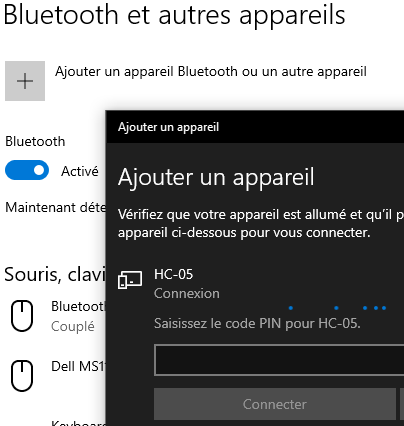
- Ajouter le HC-05 depuis les paramètres Bluetooth Android
- Rentrer le code PIN
1234 - Démarrer l'Application Bluetooth
- Appuyer sur les flèches / le joystick
- Si les flèches ne fonctionnent pas c'est qu'elles n'envoient pas les bons caractères
- Vous pouvez envoyer directement les caractères via un terminal série d'une Application Bluetooth
Voici les caractères Android :
- F pour Forward : Avancer
- B pour Backward : Reculer
- R pour Right : Aller à droite
- L pour Left : Aller à gauche
- S pour Stop : Arrêter
Voici le fonctionnement du joystick de l'application E&E: Arduino Automation par Engineers & Electronics
- Quand on appuie sur la flèche du haut, le caractère
F(objetchar) est envoyé par le téléphone au HC-05 puis à l'Arduino via la liaison série Software Arduino-HC05 qui est configurée par défaut en baudrate 9600 (vérifiable en envoyant la commandeBTSerie.print("AT+UART?");au HC-05) - Quand on relâche le bouton, le caractère
Sest envoyé
L'application E&E: Arduino Automation par Engineers & Electronics est testée ne semble pas fonctionner avec les Android récents ni iOS :
- https://play.google.com/store/apps/details?id=com.himanshu.ArduinoAutomation
- Chercher une application alternative en tapant les mots-clé bluetooth arduino
- Autres applications possibles : Carino, bluetooth2, BLE RobotCar, Arduino Bluetooth Controller (giumig)
Sources
https://knowledge.parcours-performance.com/arduino-bluetooth-hc-05-hc-06/
RC Car - Voiture modélisme radiocommandée
Pilotage depuis le clavier d'un PC
via la liaison série Arduino-USB
- Sans contrôle de vitesse des moteurs CC
//Voiture modélisée radiocommandée (RC car) avec deux moteurs CC à l'arrière et un servomoteur de direction
// A COMPLETER pour le servo //
//Le port série matériel de l'Arduino Nano (Pins 0/RX et 1/TX) est déjà utilisé pour la liaison Arduino-USB avec l'ordinateur
//On utilise donc une liaison série logicielle pour la liaison Arduino-HC05 avec le module Bluetooth
#include <SoftwareSerial.h> //Software Serial Port
#define RxDpin 2 //Pin Digital 2 pour arduino Rx (pin0=serial)
#define TxDpin 3 //Pin Digital 3 pour arduino Tx (pin1)
//Pour la liaison SoftwareSerial Arduino-HC05, quand on veut configurer le HC-05
//on maintient le bouton à côté de la PIN EN/KEY enfoncé au démarrage de l'Arduino
// #define baudrate 38400 //Vitesse pour la liaion Arduino-HC05 en mode configuration
//Pour la liaison SoftwareSerial Arduino-HC05, quand on veut communiquer à travers le bluetooth depuis un smartphone,
//on appaire le HC-05 depuis l'appli avec le mot-de-passe par défaut : 1234
#define baudrate 9600 //Vitesse pour la liaion Arduino-HC05 en mode utilisation smartphone
SoftwareSerial BTSerie(RxDpin,TxDpin);
char caractereTexte;
String phraseTexte;
void setup()
{
Serial.begin(9600); //Vitesse (baudRate) pour la liaison Arduino-USB
delay(500);
//Configuration de la liaison SoftwareSerial avec le HC-05
pinMode(RxDpin, INPUT); //Configuration du Pin RxD (Receive) en mode entrée
pinMode(TxDpin, OUTPUT); //Configuration du Pin TxD (Transmit) en mode sortie
BTSerie.begin(baudrate); //Vitesse pour la liaion Arduino-HC05
if (baudrate==38400) {
Serial.println("En mode communication USB - Pret pour les commandes AT");
Serial.println("Le HC-05 doit clignoter lentement (2 secondes)");
}
else if (baudrate==9600){
Serial.println("En mode smartphone - Pret pour être appairé");
Serial.println("Le HC-05 doit clignoter rapidement avant d'être appairé");
}
else{
Serial.println("La vitesse de communication (baudrate) a été personnalisée");
}
delay(500);
pinMode(13,OUTPUT); //left motors forward
pinMode(12,OUTPUT); //left motors reverse
pinMode(11,OUTPUT); //right motors forward
pinMode(10,OUTPUT); //right motors reverse
pinMode(9,OUTPUT); //Led
pinMode(5,OUTPUT); //SG90 steering motor
// A COMPLETER pour le servo //
//myservo.attach(5); // attaches the servo on pin 5 to the servo object
}
void loop() {
// Serial.write(blueToothSerial.read());
//On lit caractere par caractere sur la liaion Arduino-HC05 et on affiche sur la liaison Arduino-USB
if (BTSerie.available()) {
caractereTexte = BTSerie.read();
Serial.print(caractereTexte);
}
//On lit caractere par caractere sur la liaion Arduino-USB et on affiche sur la liaison Arduino-HC05
if (Serial.available()) {
caractereTexte = Serial.read();
BTSerie.write(caractereTexte);
// Serial.println("Caractere envoye vers bluetooth : ");
// Serial.println(caractereRecu);
// }
if(caractereTexte == 'F'){ //F comme Forward - avancer (tous les moteurs vers l'avant, servo à 90°)
digitalWrite(10,LOW);
digitalWrite(11,HIGH);
digitalWrite(12,LOW);
digitalWrite(13,HIGH);
}
else if(caractereTexte == 'B'){ //B comme Backward reculer (tous les moteurs en sens inverse, servo à 90°)
digitalWrite(10,HIGH);
digitalWrite(11,LOW);
// A COMPLETER //
}
else if(caractereTexte == 'L'){ //L comme Left - tourner à gauche (moteur de droite vers l'avant, gauche à l'arrêt, servo à 120°)
// A COMPLETER //
}
else if(caractereTexte == 'R'){ //R comme Right - tourner à droite (moteur de gauche vers l'avant, droite à l'arrêt, servo à 60°)
// A COMPLETER //
}
else if(caractereTexte == 'S'){ //STOP (tous les moteurs à l'arrêt, servo à 90°)
// A COMPLETER //
}
delay(100);
}
}Pilotage bluetooth avec contrôle de la vitesse des moteur
Depuis une application bluetooth de smartphone Android
Depuis le moniteur série d'Arduino IDE
Source : https://www.instructables.com/View-Serial-Monitor-Over-Bluetooth/#
- Ajouter le HC-05 dans Windows depuis les périphériques bluetooth et saisir le code PIN
1234
- Dans Arduino IDE
- Sélectionner le port série correspondant au HC-05. Il y en a deux, tester les deux
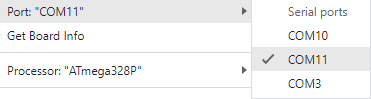
- Ouvrir le moniteur série

- Envoyer les commandes de pilotage :
F,B,L,R,S.
//source Sample Code 2 https://wiki.dfrobot.com/Micro_DC_Motor_with_Encoder-SJ01_SKU__FIT0450#target_3
//The sample code for driving one way motor encoder
#include <PID_v1.h>
const byte encoder0pinA = 0;//A pin -> the interrupt pin 0
const byte encoder0pinB = 1;//B pin -> the digital pin 3
const byte encoder0pinA_2 = 8;//A pin -> the interrupt pin 0
const byte encoder0pinB_2 = 9;//B pin -> the digital pin 3
// int E_left =5; //The enabling of L298PDC motor driver board connection to the digital interface port 5
// int M_left =4; //The enabling of L298PDC motor driver board connection to the digital interface port 4
int MOTEUR_A_1 =12; //Connexion du pilote de moteur CC l9110s au port digital 5
int MOTEUR_A_2 =13; //Connexion du pilote de moteur CC l9110s au port digital 6
int MOTEUR_B_1 =10; //Connexion du pilote de moteur CC l9110s au port digital 5
int MOTEUR_B_2 =11; //Connexion du pilote de moteur CC l9110s au port digital 6
byte encoder0PinALast;
double duration,abs_duration;//the number of the pulses
boolean Direction;//the rotation direction
boolean result;
double val_output;//Power supplied to the motor PWM value.
double Setpoint;
double Kp=0.6, Ki=5, Kd=0;
PID myPID(&abs_duration, &val_output, &Setpoint, Kp, Ki, Kd, DIRECT);
#include <Servo.h>
#define trigPin 6
#define echoPin 7
// #define EncoderInit
Servo servo1;
Servo servo2;
Servo monServo;
//Le port série matériel de l'Arduino Nano (Pins 0/RX et 1/TX) est déjà utilisé pour la liaison Arduino-USB avec l'ordinateur
//On utilise donc une liaison série logicielle pour la liaison Arduino-HC05 avec le module Bluetooth
#include <SoftwareSerial.h> //Software Serial Port
#define RxDpin 2 //Pin Digital 2 pour arduino Rx (pin0=serial)
#define TxDpin 3 //Pin Digital 3 pour arduino Tx (pin1)
//Pour la liaison SoftwareSerial Arduino-HC05, quand on veut configurer le HC-05
//on maintient le bouton à côté de la PIN EN/KEY enfoncé au démarrage de l'Arduino
// #define baudrate 38400 //Vitesse pour la liaion Arduino-HC05 en mode configuration
//Pour la liaison SoftwareSerial Arduino-HC05, quand on veut communiquer à travers le bluetooth depuis un smartphone,
//on appaire le HC-05 depuis l'appli avec le mot-de-passe par défaut : 1234
#define baudrate 9600
#include <Servo.h>
Servo myservo; // create servo object to control a servo
SoftwareSerial BTSerie(RxDpin,TxDpin);
char caractereTexte;
String phraseTexte;
void setup()
{
Serial.begin(9600);//Initialize the serial port
pinMode(MOTEUR_A_1, OUTPUT); //L298P Control port settings DC motor driver board for the output mode
pinMode(MOTEUR_A_2, OUTPUT);
pinMode(MOTEUR_B_1, OUTPUT); //L298P Control port settings DC motor driver board for the output mode
pinMode(MOTEUR_B_2, OUTPUT);
Setpoint =80; //Set the output value of the PID
myPID.SetMode(AUTOMATIC);//PID is set to automatic mode
myPID.SetSampleTime(100);//Set PID sampling frequency is 100ms
EncoderInit();//Initialize the module
pinMode(RxDpin, INPUT); //Configuration du Pin RxD (Receive) en mode entrée
pinMode(TxDpin, OUTPUT); //Configuration du Pin TxD (Transmit) en mode sortie
BTSerie.begin(baudrate);
// Commandes AT pour le HC-05
// BTSerie.print("AT+NAME?"); //Demande le nom du module. Noter le ?
// BTSerie.print("AT+NAME=RCcar-HC-05-1"); //Définir le nom du module.
BTSerie.print("AT+VERSION?"); //Demande le N° de version. Noter le ?
// BTSerie.print("AT+UART?"); //Demande la vitesse série (baudrate). Noter le ?
// BTSerie.print("AT+UART=57600,0,0"); //Définir la vitesse série (baudrate).
// BTSerie.print("AT+ROLE?"); //Demande le mode du module, maitre ou esclave. Noter le ?
// BTSerie.print("AT+PSWD?"); //Demande le mot-de-passe du module. Noter le ?
// La console série de l'ordinateur d'où l'on envoie les commandes AT doit être réglée de telle sorte que
// les fins de ligne soient « les deux, NL et CR », ce qui revient à envoyer \r\n à la fin de chaque commande.
BTSerie.print("\r\n"); // sur HC-05, toutes les commandes doivent se terminer par \r\n
// afficher ce que le module bluetooth répond
Serial.print( BTSerie.read() ); // afficher sur la console ce qui est lu sur BT
// pour AT+VERSION?, c'est le n° de version puis OK qui s'affiche
if (baudrate==38400) {
Serial.println("En mode communication USB - Pret pour les commandes AT");
Serial.println("Le HC-05 doit clignoter lentement (2 secondes)");
}
else if (baudrate==9600){
Serial.println("En mode smartphone - Pret pour être appairé");
Serial.println("Le HC-05 doit clignoter rapidement avant d'être appairé");
}
else{
Serial.println("La vitesse de communication (baudrate) a été personnalisée");
}
monServo.attach(5);
delay(500);
pinMode(13,OUTPUT); //left motors forward
pinMode(12,OUTPUT); //left motors reverse
pinMode(11,OUTPUT); //right motors forward
pinMode(10,OUTPUT); //right motors reverse
pinMode(9,OUTPUT); //Led
pinMode(5,OUTPUT); //SG90 steering motor
// A COMPLETER pour le servo //
//myservo.attach(5); // attaches the servo on pin 5 to the servo object
}
void loop()
{
//On lit caractere par caractere sur la liaion Arduino-USB et on affiche sur la liaison Arduino-HC05
if (Serial.available()) {
caractereTexte = Serial.read();
BTSerie.write(caractereTexte);
// Serial.println("Caractere envoye vers bluetooth : ");
// Serial.println(caractereRecu);
}
//On lit caractere par caractere sur la liaion Arduino-HC05 et on affiche sur la liaison Arduino-USB
if (BTSerie.available()) {
caractereTexte = BTSerie.read();
Serial.print(caractereTexte);
// }
if(caractereTexte == 'F'){ //move forward(all motors rotate in forward direction)
advance();//Motor Forward
monServo.write(90); // sets the servo position according to the scaled value
}
else if(caractereTexte == 'B'){ //move reverse (all motors rotate in reverse direction)
back();//Motor reverse
monServo.write(90); // sets the servo position according to the scaled value
}
else if(caractereTexte == 'L'){ //turn right (left side motors rotate in forward direction, right side motors doesn'caractereRecu rotate)
left();
monServo.write(60); // sets the servo position according to the scaled value
}
else if(caractereTexte == 'R'){ //turn left (right side motors rotate in forward direction, left side motors doesn'caractereRecu rotate)
right();
monServo.write(120); // sets the servo position according to the scaled value
}
else if(caractereTexte == 'S'){ //STOP (all motors stop)
Stop();
monServo.write(90);
}
abs_duration=abs(duration);
result=myPID.Compute();//PID conversion is complete and returns 1
if(result)
{
Serial.print("Pluse: ");
Serial.println(duration);
duration = 0; //Count clear, wait for the next count
} // sets the servo position according to the scaled value
}
}
void EncoderInit()
{
Direction = true;//default -> Forward
pinMode(encoder0pinB,INPUT);
attachInterrupt(0, wheelSpeed, CHANGE);
}
void wheelSpeed()
{
int Lstate = digitalRead(encoder0pinA);
if((encoder0PinALast == LOW) && Lstate==HIGH)
{
int val = digitalRead(encoder0pinB);
if(val == LOW && Direction)
{
Direction = false; //Reverse
}
else if(val == HIGH && !Direction)
{
Direction = true; //Forward
}
}
encoder0PinALast = Lstate;
if(!Direction) duration++;
else duration--;
}
void advance()//Motor Forward
{
digitalWrite(MOTEUR_A_1,LOW);
digitalWrite(MOTEUR_A_2,val_output);
digitalWrite(MOTEUR_B_1,val_output);
digitalWrite(MOTEUR_B_2,LOW);
}
void back()//Motor reverse
{
digitalWrite(MOTEUR_A_1,val_output);
digitalWrite(MOTEUR_A_2,LOW);
digitalWrite(MOTEUR_B_1,LOW);
digitalWrite(MOTEUR_B_2,val_output);
}
void left()
{
digitalWrite(MOTEUR_A_1,LOW);
digitalWrite(MOTEUR_A_2,val_output);
digitalWrite(MOTEUR_B_1,LOW);
digitalWrite(MOTEUR_B_2,LOW);
}
void right()
{
digitalWrite(MOTEUR_A_1,LOW);
digitalWrite(MOTEUR_A_2,LOW);
digitalWrite(MOTEUR_B_1,val_output);
digitalWrite(MOTEUR_B_2,LOW);
}
void Stop()//Motor stops
{
digitalWrite(MOTEUR_A_1, LOW);
digitalWrite(MOTEUR_A_2, LOW);
digitalWrite(MOTEUR_B_1, LOW);
digitalWrite(MOTEUR_B_2, LOW);
}
Sources
https://github.com/himanshus2847/Bluetooth-Controlled-Robot-using-Arduino
https://www.youtube.com/watch?v=o-aRCxh9IhE
Code voiture RC
//source Sample Code 2 https://wiki.dfrobot.com/Micro_DC_Motor_with_Encoder-SJ01_SKU__FIT0450#target_3
//The sample code for driving one way motor encoder
#include <PID_v1.h>
const byte encoder0pinA = 0;//A pin -> the interrupt pin 0
const byte encoder0pinB = 1;//B pin -> the digital pin 3
const byte encoder0pinA_2 = 8;//A pin -> the interrupt pin 0
const byte encoder0pinB_2 = 9;//B pin -> the digital pin 3
// int E_left =5; //The enabling of L298PDC motor driver board connection to the digital interface port 5
// int M_left =4; //The enabling of L298PDC motor driver board connection to the digital interface port 4
int MOTEUR_A_1 =12; //Connexion du pilote de moteur CC l9110s au port digital 5
int MOTEUR_A_2 =13; //Connexion du pilote de moteur CC l9110s au port digital 6
int MOTEUR_B_1 =10; //Connexion du pilote de moteur CC l9110s au port digital 5
int MOTEUR_B_2 =11; //Connexion du pilote de moteur CC l9110s au port digital 6
byte encoder0PinALast;
double duration,abs_duration;//the number of the pulses
boolean Direction;//the rotation direction
boolean result;
double val_output;//Power supplied to the motor PWM value.
double Setpoint;
double Kp=0.6, Ki=5, Kd=0;
PID myPID(&abs_duration, &val_output, &Setpoint, Kp, Ki, Kd, DIRECT);
#include <Servo.h>
#define trigPin 6
#define echoPin 7
// #define EncoderInit
Servo servo1;
Servo servo2;
Servo monServo;
//Le port série matériel de l'Arduino Nano (Pins 0/RX et 1/TX) est déjà utilisé pour la liaison Arduino-USB avec l'ordinateur
//On utilise donc une liaison série logicielle pour la liaison Arduino-HC05 avec le module Bluetooth
#include <SoftwareSerial.h> //Software Serial Port
#define RxDpin 2 //Pin Digital 2 pour arduino Rx (pin0=serial)
#define TxDpin 3 //Pin Digital 3 pour arduino Tx (pin1)
//Pour la liaison SoftwareSerial Arduino-HC05, quand on veut configurer le HC-05
//on maintient le bouton à côté de la PIN EN/KEY enfoncé au démarrage de l'Arduino
// #define baudrate 38400 //Vitesse pour la liaion Arduino-HC05 en mode configuration
//Pour la liaison SoftwareSerial Arduino-HC05, quand on veut communiquer à travers le bluetooth depuis un smartphone,
//on appaire le HC-05 depuis l'appli avec le mot-de-passe par défaut : 1234
#define baudrate 9600
#include <Servo.h>
Servo myservo; // create servo object to control a servo
SoftwareSerial BTSerie(RxDpin,TxDpin);
char caractereTexte;
String phraseTexte;
void setup()
{
Serial.begin(9600);//Initialize the serial port
pinMode(MOTEUR_A_1, OUTPUT); //L298P Control port settings DC motor driver board for the output mode
pinMode(MOTEUR_A_2, OUTPUT);
pinMode(MOTEUR_B_1, OUTPUT); //L298P Control port settings DC motor driver board for the output mode
pinMode(MOTEUR_B_2, OUTPUT);
Setpoint =80; //Set the output value of the PID
myPID.SetMode(AUTOMATIC);//PID is set to automatic mode
myPID.SetSampleTime(100);//Set PID sampling frequency is 100ms
EncoderInit();//Initialize the module
pinMode(RxDpin, INPUT); //Configuration du Pin RxD (Receive) en mode entrée
pinMode(TxDpin, OUTPUT); //Configuration du Pin TxD (Transmit) en mode sortie
BTSerie.begin(baudrate);
// Commandes AT pour le HC-05
// BTSerie.print("AT+NAME?"); //Demande le nom du module. Noter le ?
// BTSerie.print("AT+NAME=RCcar-HC-05-1"); //Définir le nom du module.
BTSerie.print("AT+VERSION?"); //Demande le N° de version. Noter le ?
// BTSerie.print("AT+UART?"); //Demande la vitesse série (baudrate). Noter le ?
// BTSerie.print("AT+UART=57600,0,0"); //Définir la vitesse série (baudrate).
// BTSerie.print("AT+ROLE?"); //Demande le mode du module, maitre ou esclave. Noter le ?
// BTSerie.print("AT+PSWD?"); //Demande le mot-de-passe du module. Noter le ?
// La console série de l'ordinateur d'où l'on envoie les commandes AT doit être réglée de telle sorte que
// les fins de ligne soient « les deux, NL et CR », ce qui revient à envoyer \r\n à la fin de chaque commande.
BTSerie.print("\r\n"); // sur HC-05, toutes les commandes doivent se terminer par \r\n
// afficher ce que le module bluetooth répond
Serial.print( BTSerie.read() ); // afficher sur la console ce qui est lu sur BT
// pour AT+VERSION?, c'est le n° de version puis OK qui s'affiche
if (baudrate==38400) {
Serial.println("En mode communication USB - Pret pour les commandes AT");
Serial.println("Le HC-05 doit clignoter lentement (2 secondes)");
}
else if (baudrate==9600){
Serial.println("En mode smartphone - Pret pour être appairé");
Serial.println("Le HC-05 doit clignoter rapidement avant d'être appairé");
}
else{
Serial.println("La vitesse de communication (baudrate) a été personnalisée");
}
monServo.attach(5);
delay(500);
pinMode(13,OUTPUT); //left motors forward
pinMode(12,OUTPUT); //left motors reverse
pinMode(11,OUTPUT); //right motors forward
pinMode(10,OUTPUT); //right motors reverse
pinMode(9,OUTPUT); //Led
pinMode(5,OUTPUT); //SG90 steering motor
// A COMPLETER pour le servo //
//myservo.attach(5); // attaches the servo on pin 5 to the servo object
}
void loop()
{
//On lit caractere par caractere sur la liaion Arduino-HC05 et on affiche sur la liaison Arduino-USB
if (BTSerie.available()) {
caractereTexte = BTSerie.read();
Serial.print(caractereTexte);
}
//On lit caractere par caractere sur la liaion Arduino-USB et on affiche sur la liaison Arduino-HC05
if (Serial.available()) {
caractereTexte = Serial.read();
BTSerie.write(caractereTexte);
// Serial.println("Caractere envoye vers bluetooth : ");
// Serial.println(caractereRecu);
// }
if(caractereTexte == 'F'){ //move forward(all motors rotate in forward direction)
advance();//Motor Forward
monServo.write(90); // sets the servo position according to the scaled value
}
else if(caractereTexte == 'B'){ //move reverse (all motors rotate in reverse direction)
back();//Motor reverse
monServo.write(90); // sets the servo position according to the scaled value
}
else if(caractereTexte == 'L'){ //turn right (left side motors rotate in forward direction, right side motors doesn'caractereRecu rotate)
left();
monServo.write(60); // sets the servo position according to the scaled value
}
else if(caractereTexte == 'R'){ //turn left (right side motors rotate in forward direction, left side motors doesn'caractereRecu rotate)
right();
monServo.write(120); // sets the servo position according to the scaled value
}
else if(caractereTexte == 'S'){ //STOP (all motors stop)
Stop();
monServo.write(90);
}
abs_duration=abs(duration);
result=myPID.Compute();//PID conversion is complete and returns 1
if(result)
{
Serial.print("Pluse: ");
Serial.println(duration);
duration = 0; //Count clear, wait for the next count
} // sets the servo position according to the scaled value
}
}
void EncoderInit()
{
Direction = true;//default -> Forward
pinMode(encoder0pinB,INPUT);
attachInterrupt(0, wheelSpeed, CHANGE);
}
void wheelSpeed()
{
int Lstate = digitalRead(encoder0pinA);
if((encoder0PinALast == LOW) && Lstate==HIGH)
{
int val = digitalRead(encoder0pinB);
if(val == LOW && Direction)
{
Direction = false; //Reverse
}
else if(val == HIGH && !Direction)
{
Direction = true; //Forward
}
}
encoder0PinALast = Lstate;
if(!Direction) duration++;
else duration--;
}
void advance()//Motor Forward
{
digitalWrite(MOTEUR_A_1,LOW);
digitalWrite(MOTEUR_A_2,val_output);
digitalWrite(MOTEUR_B_1,val_output);
digitalWrite(MOTEUR_B_2,LOW);
}
void back()//Motor reverse
{
digitalWrite(MOTEUR_A_1,val_output);
digitalWrite(MOTEUR_A_2,LOW);
digitalWrite(MOTEUR_B_1,LOW);
digitalWrite(MOTEUR_B_2,val_output);
}
void left()
{
digitalWrite(MOTEUR_A_1,LOW);
digitalWrite(MOTEUR_A_2,val_output);
digitalWrite(MOTEUR_B_1,LOW);
digitalWrite(MOTEUR_B_2,LOW);
}
void right()
{
digitalWrite(MOTEUR_A_1,LOW);
digitalWrite(MOTEUR_A_2,LOW);
digitalWrite(MOTEUR_B_1,val_output);
digitalWrite(MOTEUR_B_2,LOW);
}
void Stop()//Motor stops
{
digitalWrite(MOTEUR_A_1, LOW);
digitalWrite(MOTEUR_A_2, LOW);
digitalWrite(MOTEUR_B_1, LOW);
digitalWrite(MOTEUR_B_2, LOW);
}