#define trigPin 6
#define echoPin 7
Servo servo1;
Servo servo2;
void setup() {
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
servo1.attach(11);
servo2.attach(10);
}
void loop() {
long duration, distance; // Nous déclarons notre variable que nous retrouverons plus tard
// Envoie une impulsion courte pour déclencher le capteur ultrasonique
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite(trigPin, HIGH); // Début de l’impulsion
delayMicroseconds(10); // Durée de l’impulsion (10µs)
digitalWrite(trigPin, LOW); // Fin de l’impulsion
// Mesure du temps entre l’émission et la réception de l’onde sonore
duration = pulseIn(echoPin, HIGH);
// Conversion de la durée en distance (en cm)
distance = (duration*0.034) / 2;
// Si un obstacle est détecté à moins de 20 cm
if (distance < 20) {
// Mouvement 1 : envoie d'un signal d'une durée 1000 µs à servo1, envoie d'un signal d'une durée 2000 µs à servo2
servo1.writeMicroseconds(1000);
servo2.writeMicroseconds(2000);
delay (2000); // Attend 2 secondes
// Mouvement 2 : servo1 reste dans sa position, envoie d'un signal d'une durée de 1500 us à servo2
servo1.writeMicroseconds(1000);
servo2.writeMicroseconds(1500);
delay (2000);// Attend 2 secondes
}
else {
// Si aucun obstacle détecté on avance normalement
servo1.writeMicroseconds(2000);
servo2.writeMicroseconds(1000);
delay (2000);
}
}
}
```
# Animation LittleBot (2h30)
#### **🤖 Introduction au projet – Le LittleBot**
##### 🎯 Qu’est-ce que le LittleBot ?
Le **LittleBot** est un **petit robot éducatif** que tu peux **programmer toi-même** !
Il est équipé de :
- **deux roues** avec des **servomoteurs RC 360°** pour avancer, reculer ou tourner,
- un **capteur à ultrasons** pour "voir" ce qu’il y a devant lui,
- et un **cerveau** : une carte **Arduino Nano**.
##### 🧠 À quoi sert ce projet ?
Ce projet te permet de **découvrir la robotique et la programmation** en t’amusant.
Tu vas apprendre à :
1. Programmer le robot avec des **blocs** dans **mBlock** (comme des LEGO numériques),
2. Contrôler les **roues** du robot,
3. Utiliser un **capteur pour éviter les obstacles**,
4. Faire un robot **autonome**, comme un vrai petit véhicule intelligent !
#### 🟨 **Étape 1 – Découverte de mBlock**
##### 🧩 1. Présentation de mBlock
**mBlock** est un logiciel de programmation qui utilise des **blocs colorés** qu’on assemble comme des briques de LEGO.
Il est basé sur **Scratch**, mais adapté pour programmer des robots comme le **LittleBot**.
[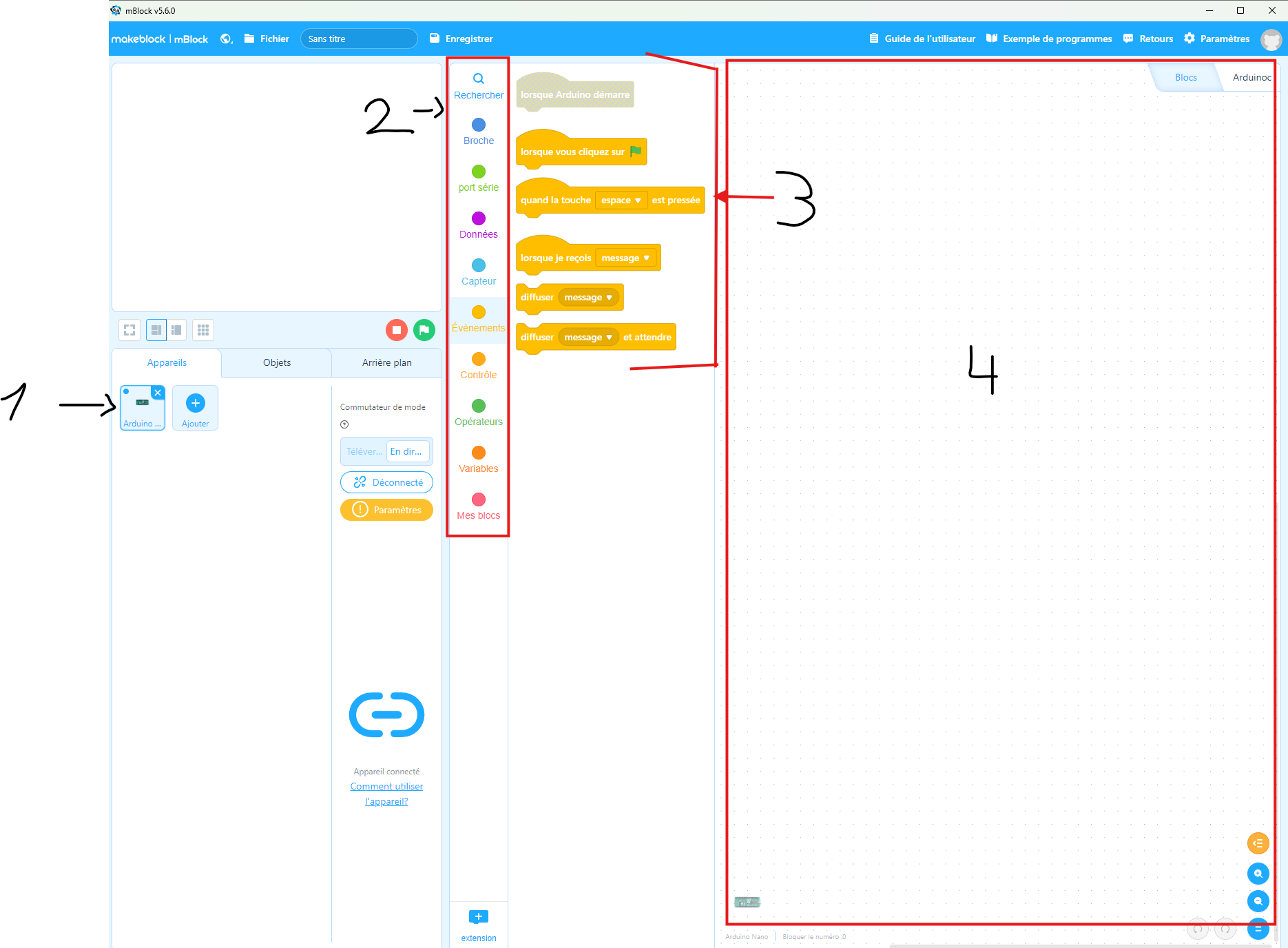](https://innovation.iha.unistra.fr/uploads/images/gallery/2025-07/JXzimage.png)
1\) Appareil que nous programmons, ici nous sommes avec un Arduino nano
2\) Catégorie de bloc de programmation
3\) Bloc de programmation (à glisser dans l'interface de dépôt de bloc pour la programmation)
4\) Interface de dépôt de bloc pour la programmation
#### 🟩 **Étape 2 – Qu’est-ce qu’un Arduino Nano ?**
#### 🧠 C’est quoi un Arduino Nano ?
Un **Arduino Nano** est une **petite carte électronique** :
[](https://innovation.iha.unistra.fr/uploads/images/gallery/2025-07/PRRimage.png)
> C’est le « cerveau » du robot.
Il reçoit des **instructions** depuis l’ordinateur (grâce à mBlock), et il contrôle les **moteurs et les capteurs du robot**…
Dans le LittleBot, l’Arduino Nano permet de :
- Lire les informations du capteur à ultrasons (ex : distance),
- Contrôler les servomoteurs,
- Exécuter des actions (avancer, reculer, s’arrêter…).
🧠 On peut dire que **tu écris un programme** avec mBlock et que **l’Arduino le suit à la lettre**.
#### 🟦 **Étape 3 – Qu’est-ce qu’un servomoteur RC 360° ?**
##### 🔄 Qu’est-ce qu’un servomoteur RC 360° ?
Un **servomoteur RC 360°** (ou « continu ») est un petit moteur qui **peut tourner en continu dans les deux sens** (comme une roue), contrairement aux servos classiques qui ne tournent que sur un angle limité (en général 180° maximum).
##### ⚙️ À quoi ça sert dans un robot comme le LittleBot ?
Dans le LittleBot, ces servos sont utilisés pour faire **tourner les roues** du robot. En envoyant des signaux différents, on peut :
- **Faire avancer** le robot (les deux roues tournent en avant),
- **Faire reculer** le robot (les deux roues tournent en arrière),
- **Faire tourner** (une roue avance, l’autre recule ou reste fixe).
##### 🎛️ Comment on contrôle la vitesse et le sens ?
Pour commencer un programme, on commence toujours par le bloc 'lorsque Arduino démarre'
[](https://innovation.iha.unistra.fr/uploads/images/gallery/2025-07/FdEimage.png)
Ensuite, on va indiquer à l'Arduino nano que l'on veut que notre programme fonctionne tout le temps grâce au bloc 'pour toujours' dans la catégorie 'Contrôle'.
[](https://innovation.iha.unistra.fr/uploads/images/gallery/2025-07/D3qimage.png)
Et maintenant, nous allons faire fonctionner notre servomoteur. Allez dans la catégorie 'Servo360' et prendre le bloc 'servo 9 tourne à 0'.
[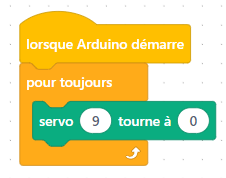](https://innovation.iha.unistra.fr/uploads/images/gallery/2025-07/93timage.png)
Comment fonctionne ce bloc ?
[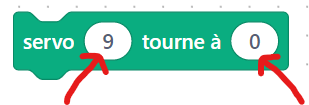](https://innovation.iha.unistra.fr/uploads/images/gallery/2025-04/Couimage.png)
Numéro de broche vitesse du servomoteur, dans un sens entre \[-100 et 0\[ et dans l'autre entre \]0 et 100\]). A 0 on est donc à l'arrêt
Attention ce bloc ne contrôle qu'un seul moteur, nos servomoteurs sont branchés sur les broches numéros 10 et 9.
Comment téléverser le code dans l'arduino nano?
[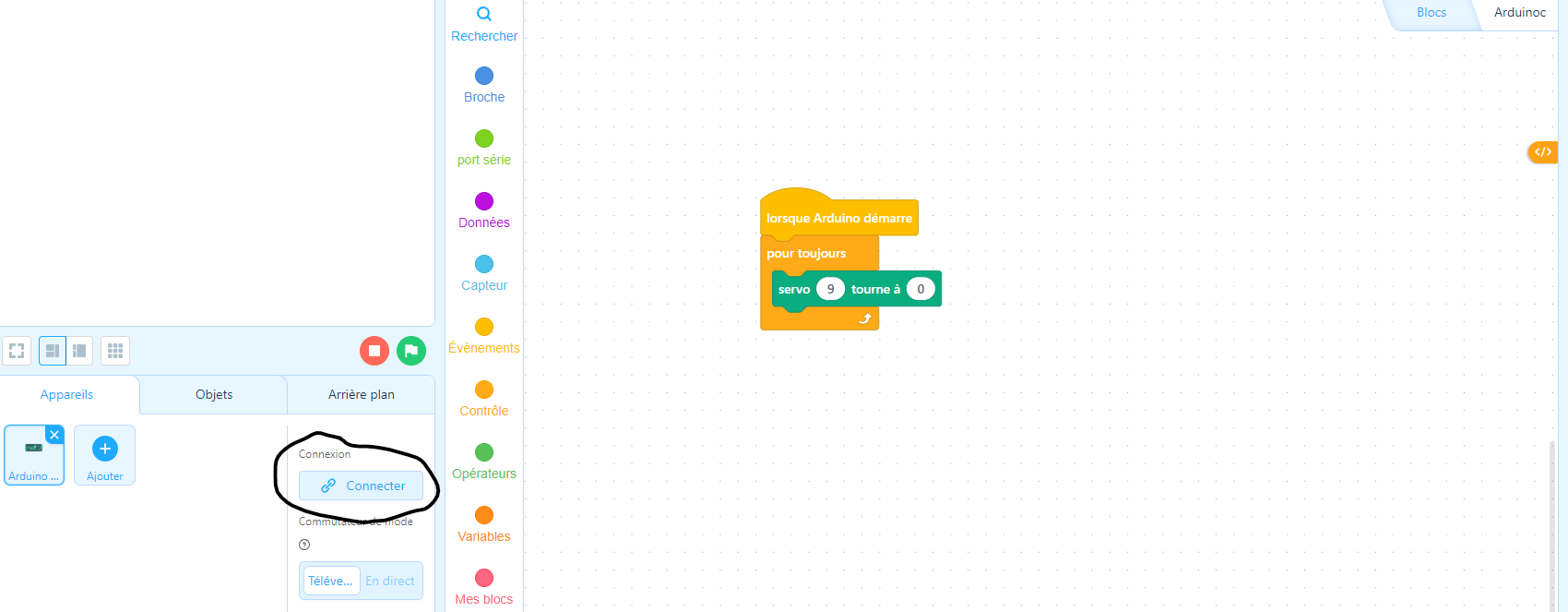](https://innovation.iha.unistra.fr/uploads/images/gallery/2025-07/Ukoimage.png)
Sélectionner un appareil disponibles, si le programme ne se téléverse pas vous n'aurez cas vous déconnecter de l'appareil que vous avez choisis et essayer avec un autre. Cliquer sur 'Connecter' puis 'Télécharger le code'.
[](https://innovation.iha.unistra.fr/uploads/images/gallery/2025-07/Mxfimage.png)[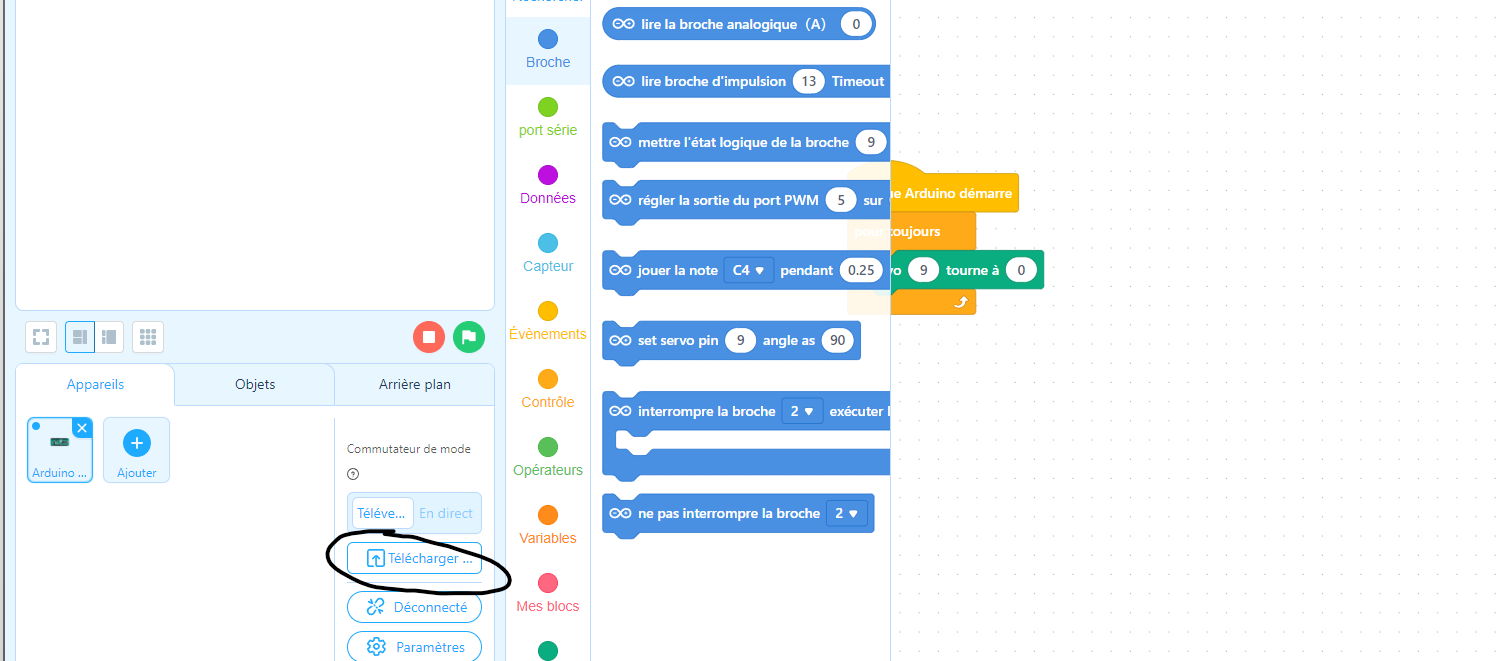](https://innovation.iha.unistra.fr/uploads/images/gallery/2025-07/DYUimage.png)
Chaque exercice est à faire valider par un animateur
##### Exercice n°1 :
Faire bouger les deux servomoteurs
##### Exercice n°2 :
Faire bouger les deux servomoteurs dans le même sens afin que le robot aille vers l'avant
##### Exercice n°3 :
Faire avancer le robot pendant quelques secondes, et le faire faire revenir.
#### **🛑 Étape 4 : Détecter un obstacle avec le capteur à ultrasons**
##### 📡 Qu’est-ce qu’un capteur à ultrasons ?
Le **capteur à ultrasons** permet au robot de "voir" ce qu’il y a devant lui… sans yeux 👀 !
🟠 Il envoie un **son très aigu** (inaudible pour nous) et mesure le temps que met l’écho à revenir.
👉 Plus l’écho revient vite, plus l’objet est **proche**.
👉 Plus il met du temps, plus l’objet est **loin**.
Dans un premier temps nous allons apprendre à utiliser le capteur à ultrasons.
Allez faire un tour sur cette page ! : (ne pas réaliser la partie câblage ni le code en C avec arduino IDE)
[https://innovation.iha.unistra.fr/books/robotique-educative/page/quest-ce-quun-capteur-a-ultrasons](https://innovation.iha.unistra.fr/books/robotique-educative/page/quest-ce-quun-capteur-a-ultrasons)
Maintenant que vous savez utilisez le capteur à ultrasons, passons à la suite.
Nouveaux blocs utilisables :
\- Les conditions :
🧠 Les blocs de condition permettent au robot de **prendre des décisions**.
Comme dans la vie de tous les jours :
*👉 "S’il pleut, je prends mon parapluie."*
En programmation, c’est pareil :
👉 *"Si un obstacle est devant moi, je m’arrête."*
[](https://innovation.iha.unistra.fr/uploads/images/gallery/2025-07/HS0image.png)
#####
\- Les opérations :
🧠 Les blocs d’opérations servent à **faire des calculs** ou des **comparaisons**.
[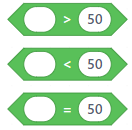](https://innovation.iha.unistra.fr/uploads/images/gallery/2025-07/aOkimage.png)[](https://innovation.iha.unistra.fr/uploads/images/gallery/2025-07/A9uimage.png)
A vous de choisir les blocs les plus pertinents et les essayer ! N'oubliez pas tout les blocs que vous avez vue depuis le début de l'animation !
##### Exercice n°4 :
Programmer le Littlebot pour faire en sorte qu'il s'arrête lorsqu'il croise un obstacle à moins de 10 cm de lui
#### **🚗 Étape 5 : Esquiver un obstacle**
##### Exercice n°5 :
Maintenant que le Littlebot arrive à s'arrêter lorsqu'il croise un obstacle, faites en sorte qu'il l'esquive comme le ferait un robot aspirateur!
# Club Robotique - Poubelle à couvercle automatique
# Description du projet
#### **Introduction :**
Pour ce cycle, nous allons réalisée une poubelle avec une ouverture de couvercle automatique.
[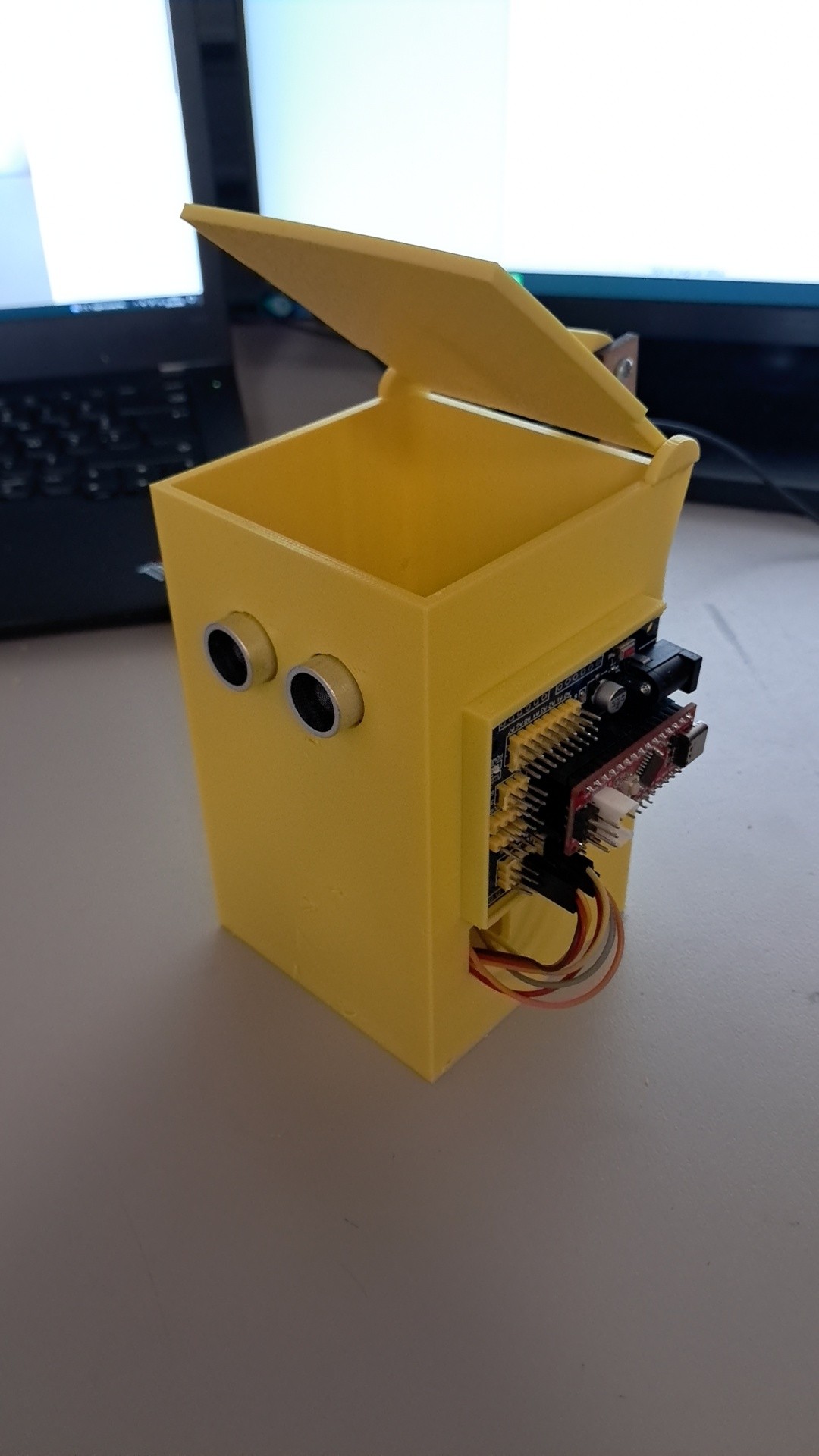](https://innovation.iha.unistra.fr/uploads/images/gallery/2026-02/snapchat-249294718.jpg)
#### **Description des compétences visées :**
**Compétences techniques et mécaniques :**
- Conception mécanique : savoir imaginer et concevoir le mécanisme d'ouverture automatique du couvercle
- Assemblage de composants : apprendre à manipuler et assembler les différentes parties (couvercle, axe, moteur, composants électroniques, etc.)
- Choix des matériaux : identifier les matériaux adaptés au projet
**Compétences en électronique :**
- Découverte et câblage de capteurs pour détecter une présence.
- Découverte et câblage de servomoteur pour l'ouverture/fermeture du couvercle.
- Savoir réaliser un schéma de câblage et connecter les composants sur une carte Arduino.
**Compétences en programmation :**
- Programmation d'un microcontrôleur Arduino : écrire un code qui gère les capteurs, les délais, et l'action du moteur.
- Logique conditionnelle : comprendre comment programmer des conditions simples (si détection → ouvrir couvercle).
- Optimisation du fonctionnement : ajuster les temps de réponse, la durée d’ouverture, etc.
**Compétences transversales :**
- Gestion de projet : planifier les étapes de réalisation, répartir les tâches, respecter les délais.
- Résolution de problèmes : savoir réagir face aux imprévus techniques ou fonctionnels.
- Travail en équipe.
#### **Description du programme des séances :**
**~6 séances :**
- ~Introduction du projet (brainstorming)
- ~1 séances sur TinkerCAD et sur l'impression 3D
- ~1 séance sur inkscape et sur la découpe laser
- ~1 séance Actionneur : servomoteur RC 180°(déplacement)
- ~1 séance Capteur : ultrason (distance)
- ~1 séance Assemblage et programmation
#### **Matériel :**
- 1 x Arduino Nano ou compatible ([seeeduino](https://www.lextronic.fr/carte-seeeduino-nano-102010268-59340.html), funduino,...) : ~10€
- 1 x câble USB C : ~1€
- 1 x [Sensor Shield](https://www.amazon.fr/Expansion-sensor-Shield-compatible-Arduino/dp/B072FCNF54/ref=sr_1_5?__mk_fr_FR=%C3%85M%C3%85%C5%BD%C3%95%C3%91&crid=EYZL0IOYS08U&keywords=expansion+arduino+nano&qid=1687874510&sprefix=epansion+arduino+nano%2Caps%2C157&sr=8-5) pour Arduino Nano : ~3€
- 1 x servomoteur à rotation 180° ([Servomoteur 180° SG90 9g](https://fr.aliexpress.com/item/1005006379480535.html "Servomoteur 180° SG90 9g")) : ~2€
- 1 x Module ultrason ([HC-SR04](https://www.amazon.fr/gp/product/B078S45WTG/)) : ~2€
- Une imprimante 3D pour imprimer les pièces du projet (fichier disponible à la prochaine page)(~5€ de filament) :
Total de 23€ par poubelle
- Une découpe laser pour découper une pièce du projet
# Modélisation en 3D du couvercle
#### **Préparation de la séance (Pour l'animateur) :**
Avant de commencer à modéliser en 3D notre pièce, veuillez consulter les pages suivantes :
- Cette [page](https://innovation.iha.unistra.fr/books/2-fablab-formation-machines-logiciels/page/creation-dune-classe-tinkercad) expliquant comment créer une classe sur Tinkercad (utile pour le travail en groupe ou en classe).
- Cette [page](https://innovation.iha.unistra.fr/books/2-fablab-formation-machines-logiciels/page/initiation-3d-tinkercad) expliquant comment utiliser Tinkercad pour créer un modèle 3D (une séance pour apprendre à utiliser tinkercad avant de modéliser la pièce finale peut-être envisagé)
#### **Début de la séance :**
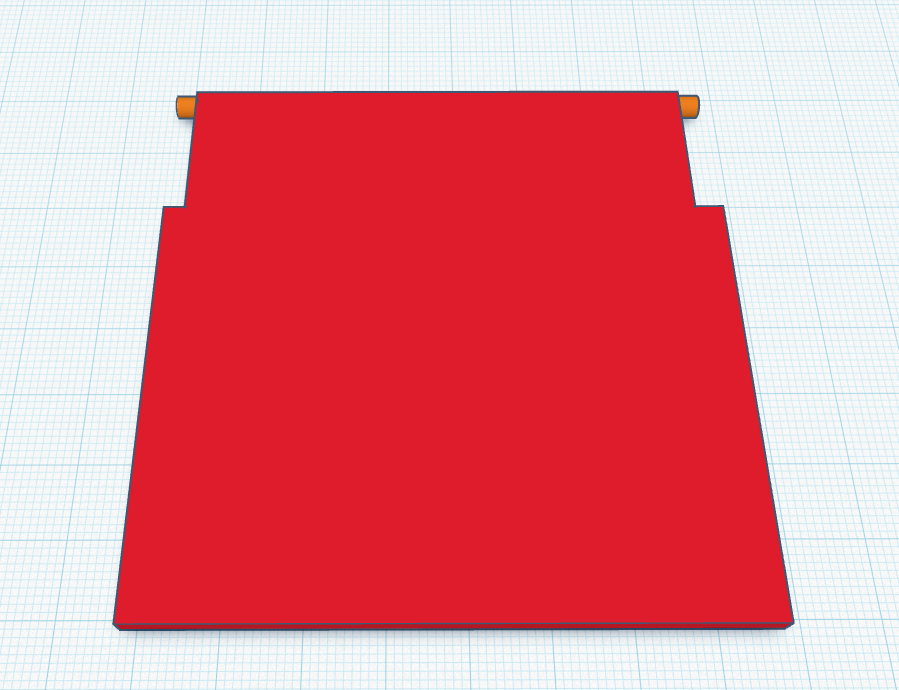
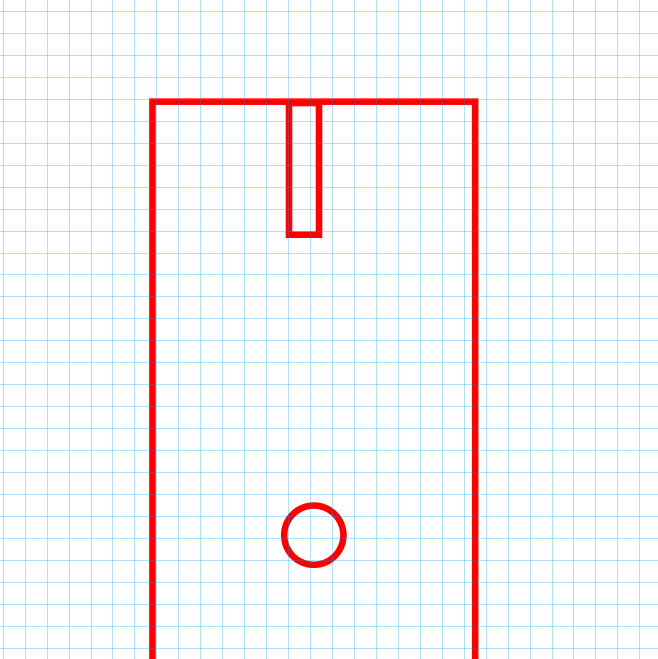
**Commençons à modéliser en 3D le couvercle de la poubelle à couvercle automatique.**
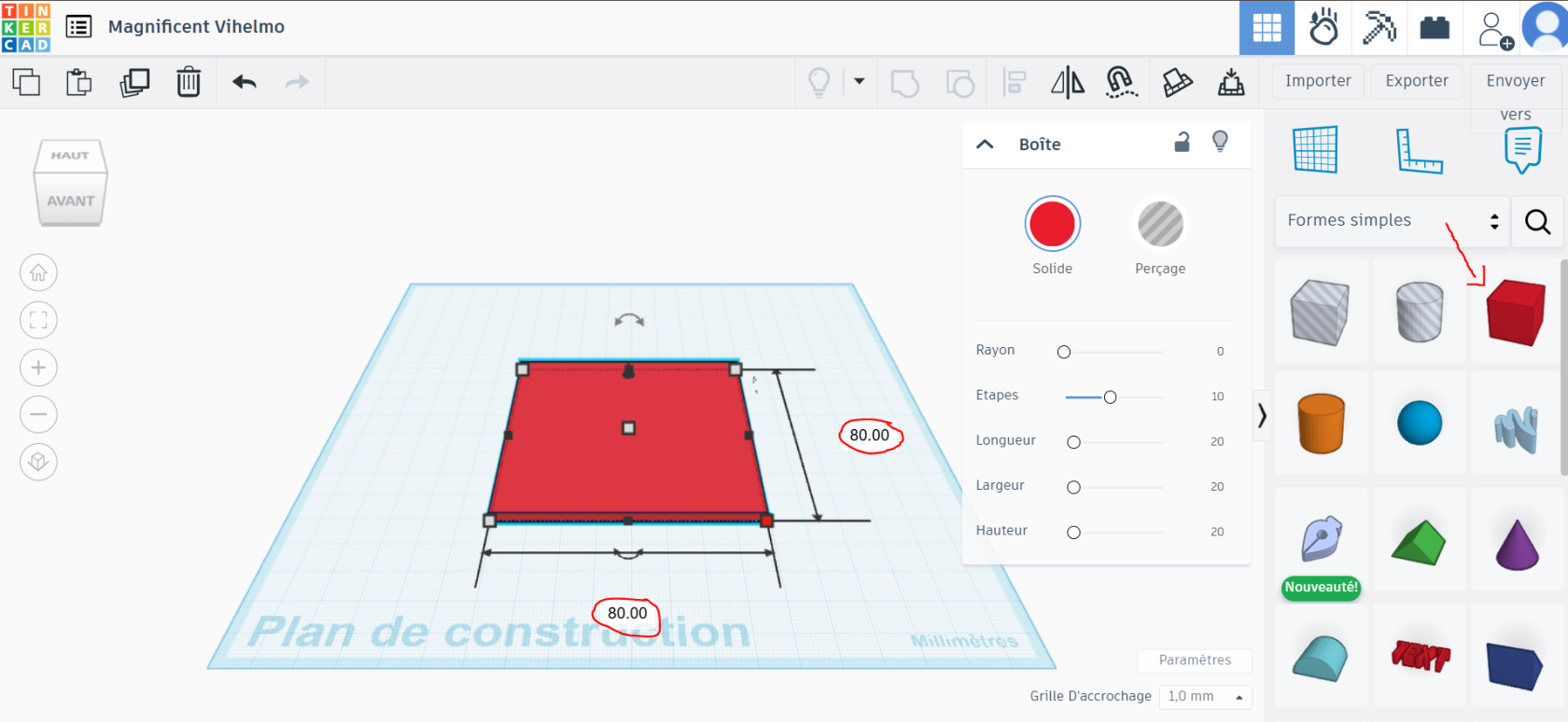
[](https://innovation.iha.unistra.fr/uploads/images/gallery/2026-02/ODYimage.png)
Réaliser un pavé droit de dimension :
- 80 mm de Longueur
- 80 mm de largeur
- 3 mm de hauteur
[](https://innovation.iha.unistra.fr/uploads/images/gallery/2025-05/1.PNG)
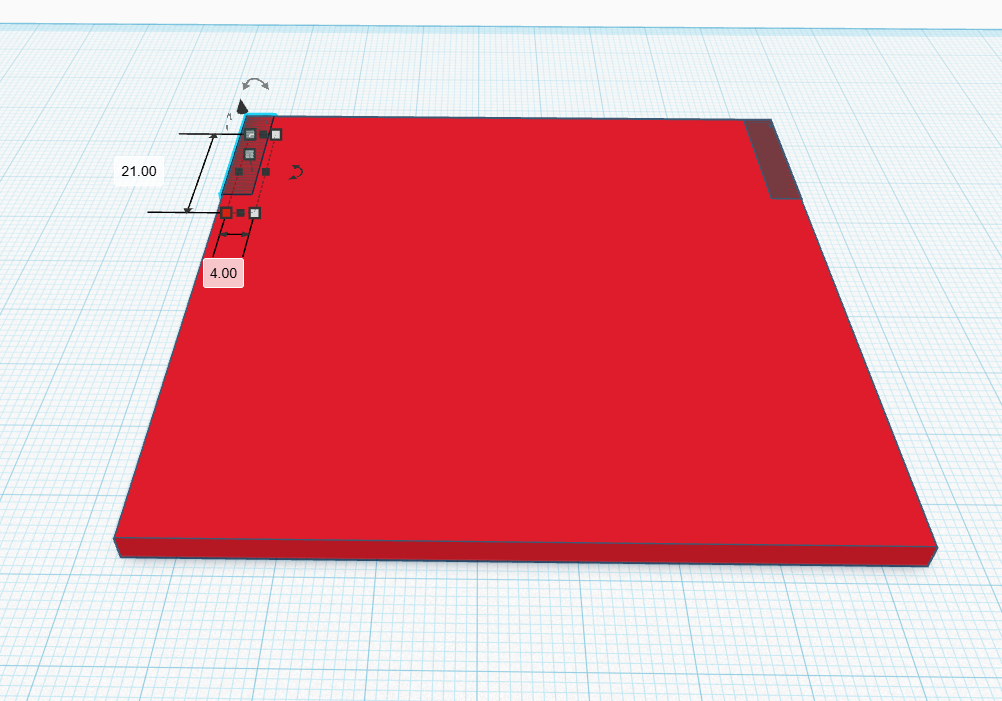
Ajouter deux pavés droits de dimensions :
- 21 mm de longueur
- 4 mm de largeur
- 3 mm de hauteur
Utiliser le mode "perçage" sur ces blocs, puis les placer dans les coins supérieurs gauche et droite du pavé droit comme indiqué ci-dessous.
[](https://innovation.iha.unistra.fr/uploads/images/gallery/2026-02/Ag0image.png)[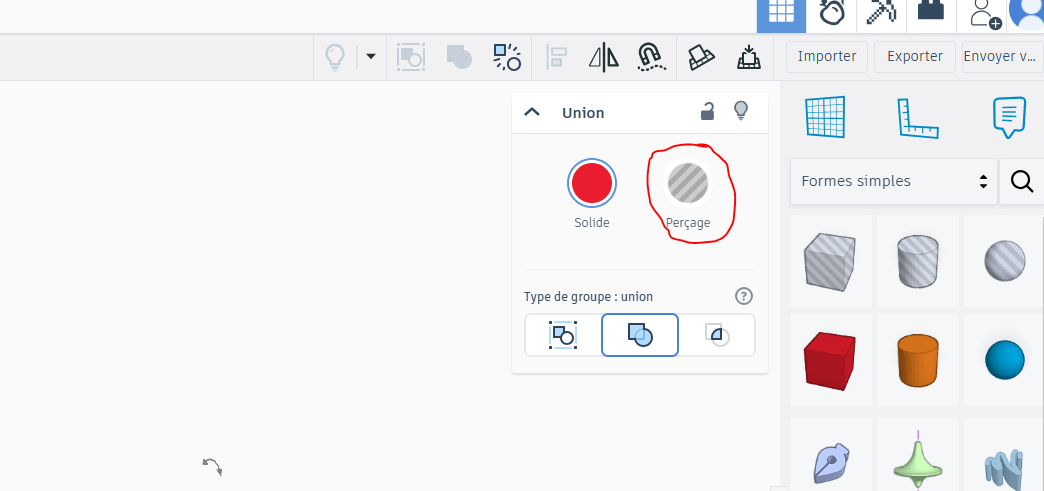](https://innovation.iha.unistra.fr/uploads/images/gallery/2026-02/IGEimage.png)
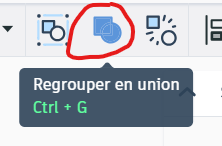
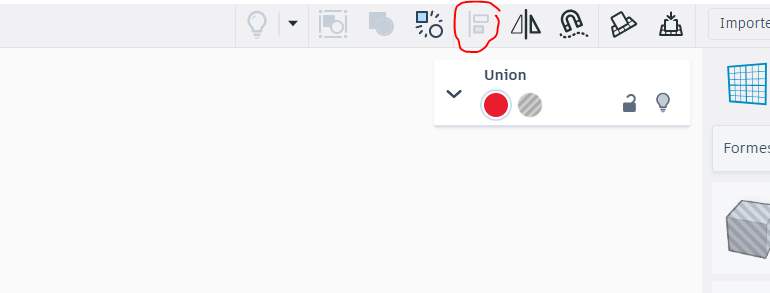
Sélectionner tout le modèle en appuyant sur les touches "CTRL + A" de votre clavier et utiliser l'outil "Regrouper en union" (Ou les touches "CTRL + G" de votre clavier.
[](https://innovation.iha.unistra.fr/uploads/images/gallery/2026-02/SxNimage.png)
Ajouter 2 cylindres de dimensions :
- 3 mm de longueur
- 3 mm de largeur
- 3 mm de hauteur
Et positionnez-les comme indiqué sur l'image ci-dessous.
[](https://innovation.iha.unistra.fr/uploads/images/gallery/2026-02/ZM7image.png)
Puis regrouper le tout.
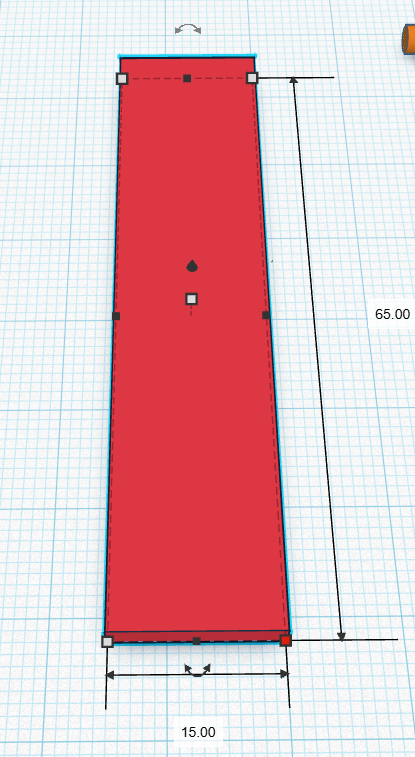
Ajouter un cube et le modifier pour obtenir les dimensions suivantes :
- 65 mm de longueur
- 15 mm de largeur
- 3 mm de hauteur
[](https://innovation.iha.unistra.fr/uploads/images/gallery/2026-02/32simage.png)
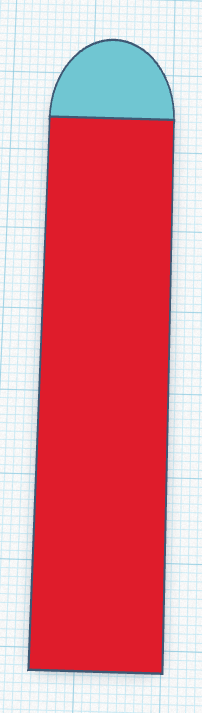
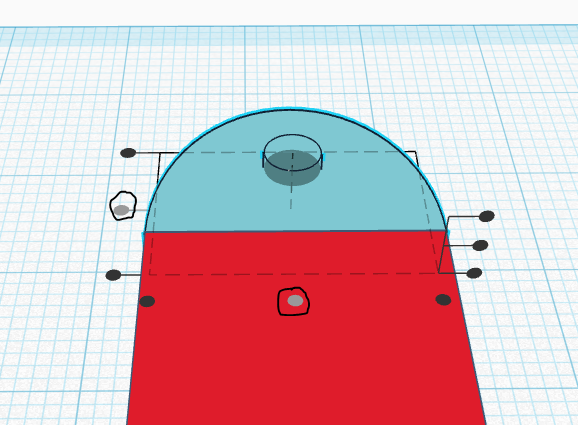
Ensuite, ajouter un "toit arrondi" et le modifier pour obtenir les dimensions suivantes :
- 15 mm de longueur
- 10 mm de largueur
- 3 mm de hauteur
Le positionner en haut du pavé précédemment créé.
[](https://innovation.iha.unistra.fr/uploads/images/gallery/2026-02/j63image.png)
Après cela, ajouter un cylindre de dimensions :
- 3 mm de longueur
- 3 mm de largueur
- 3 mm de hauteur
Puis le mettre en mode "perçage".
Maintenant, il faut le positionner au centre de notre toit arrondi. Pour cela utiliser l'outil "Aligner" :
[](https://innovation.iha.unistra.fr/uploads/images/gallery/2026-02/lpximage.png)
et positionner notre cylindre au centre comme l'image ci-dessous :
[](https://innovation.iha.unistra.fr/uploads/images/gallery/2026-02/YeVimage.png)
Puis, regrouper le tout ensemble (CTRL + G) :
[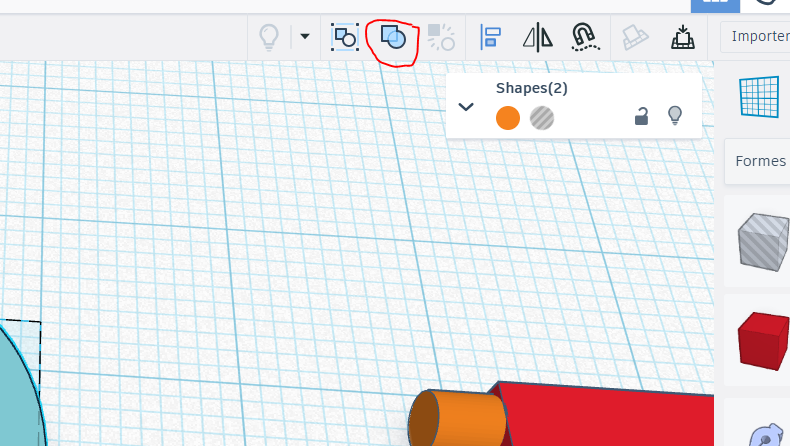](https://innovation.iha.unistra.fr/uploads/images/gallery/2026-02/5Utimage.png)
Après cela, faites une rotation de 90° à notre modèle 3D.
[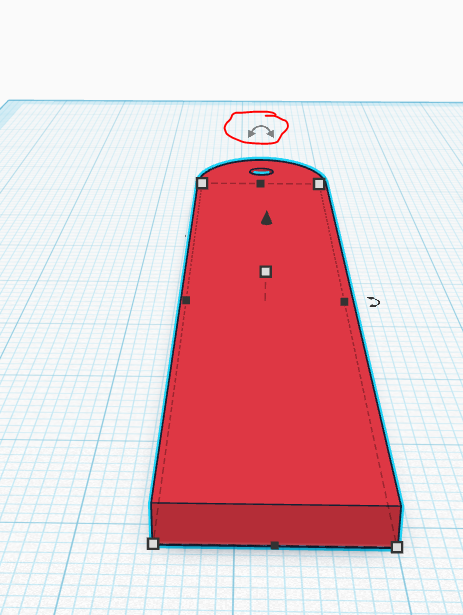](https://innovation.iha.unistra.fr/uploads/images/gallery/2026-02/G1mimage.png)[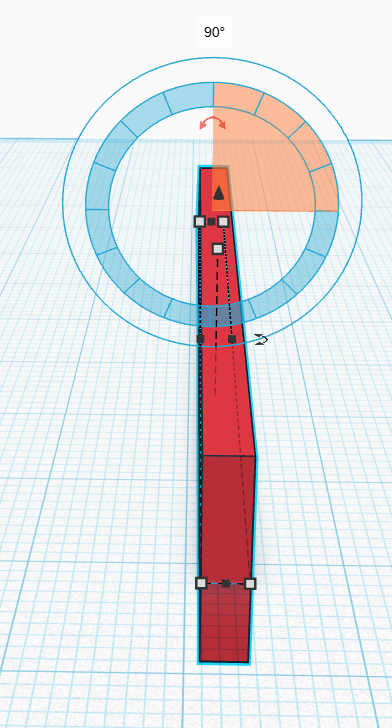](https://innovation.iha.unistra.fr/uploads/images/gallery/2026-02/o7timage.png)
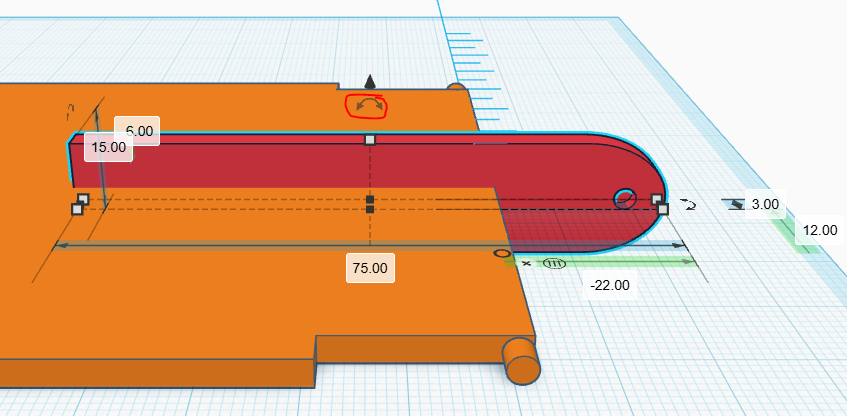
Ensuite, positionner la forme au centre de notre base en utilisant l'outil "Aligner" :
[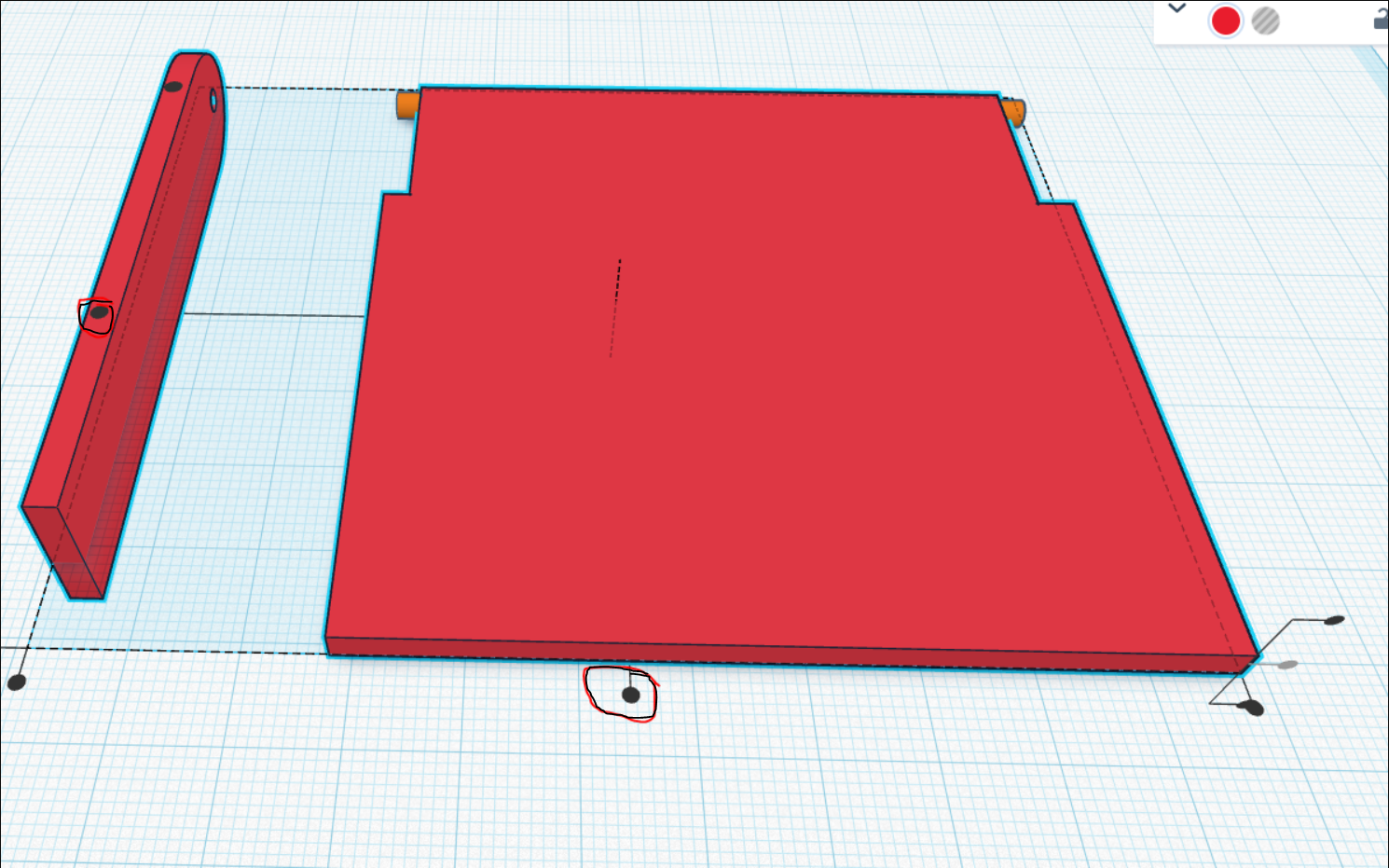](https://innovation.iha.unistra.fr/uploads/images/gallery/2026-02/ng1image.png)[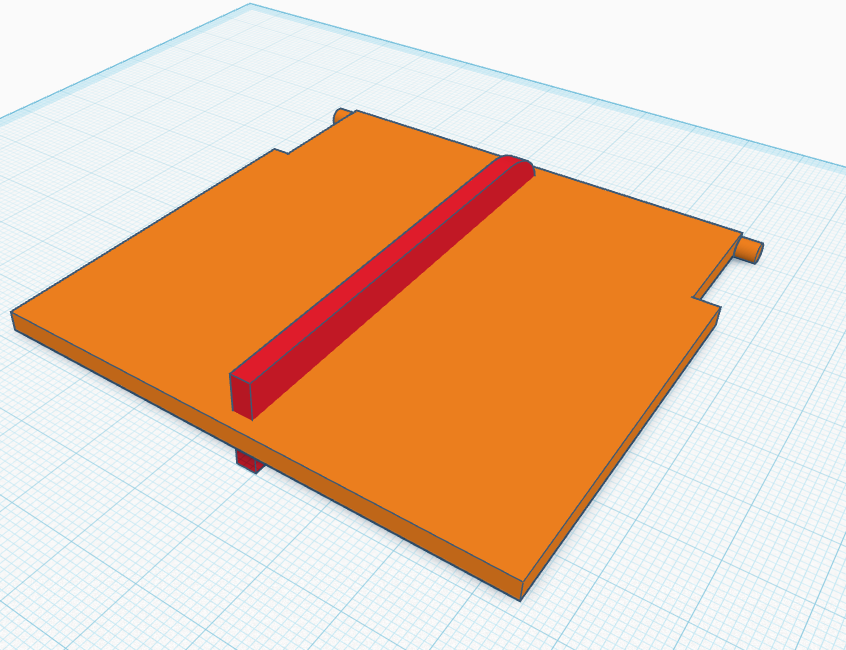](https://innovation.iha.unistra.fr/uploads/images/gallery/2026-02/sTFqweimage.png)
Il faut à présent faire avancer de 22 mm notre forme par rapport à notre base.
Pour cela, utiliser l'outil "Règle" comme indiqué ci-dessous :
[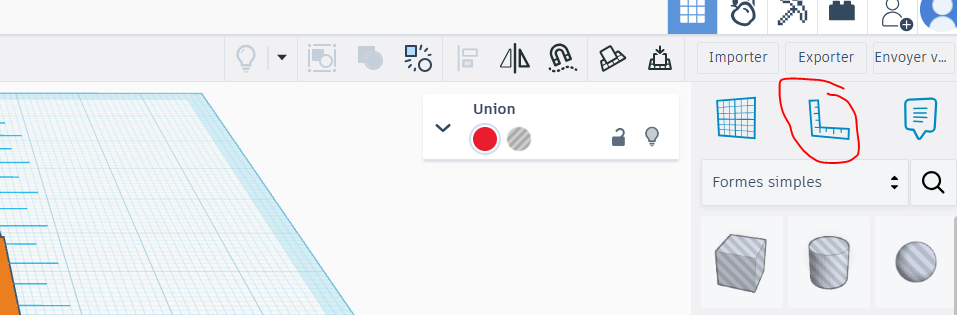](https://innovation.iha.unistra.fr/uploads/images/gallery/2026-02/iHMimage.png)
et la positionner au niveau de notre base :
[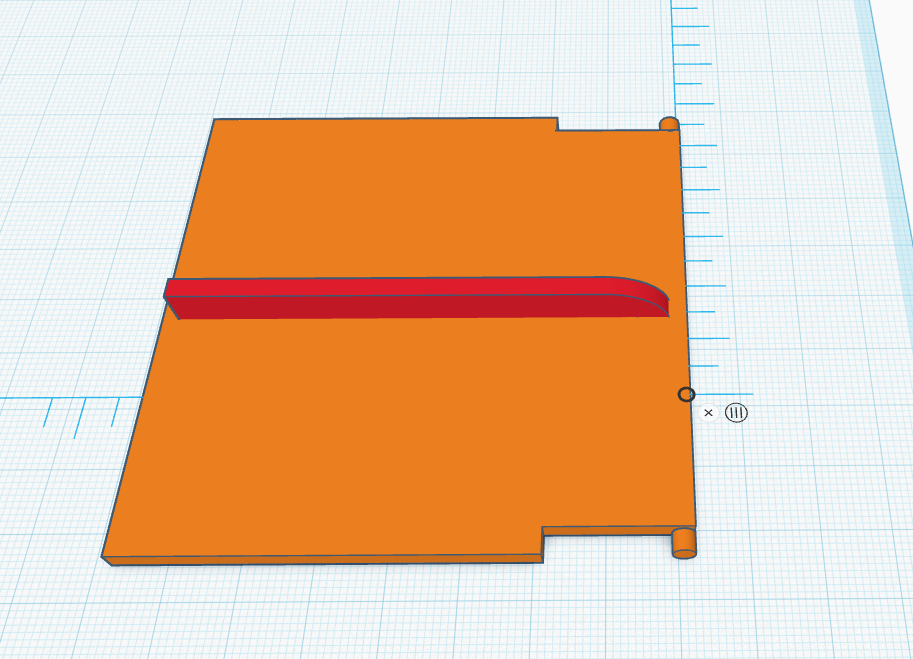](https://innovation.iha.unistra.fr/uploads/images/gallery/2026-02/L1gimage.png)
Déplacer notre forme de -22 mm :
[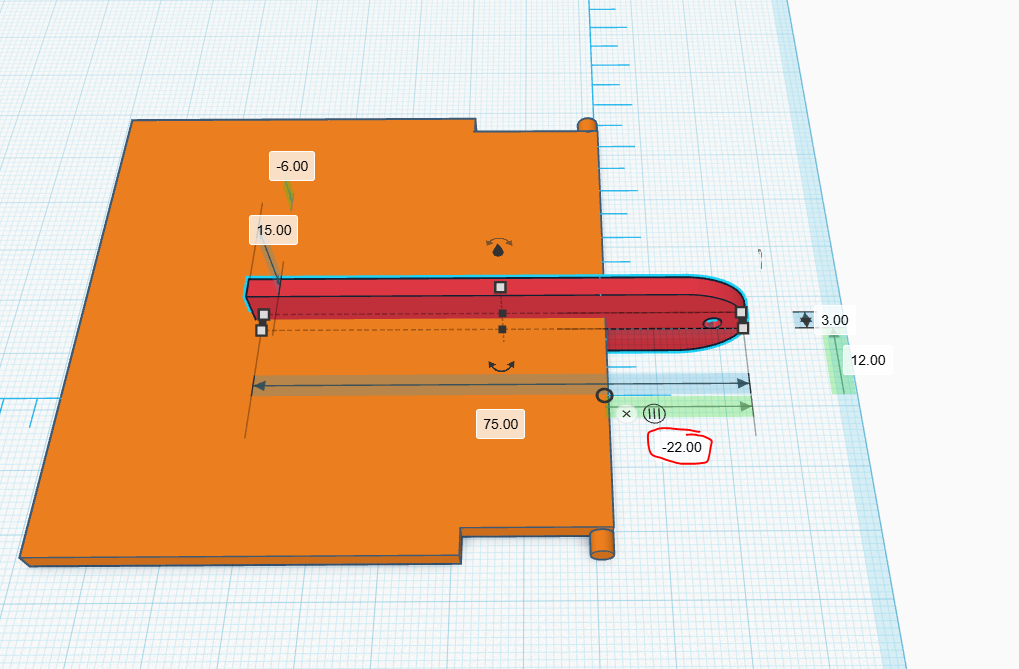](https://innovation.iha.unistra.fr/uploads/images/gallery/2026-02/KM3image.png)
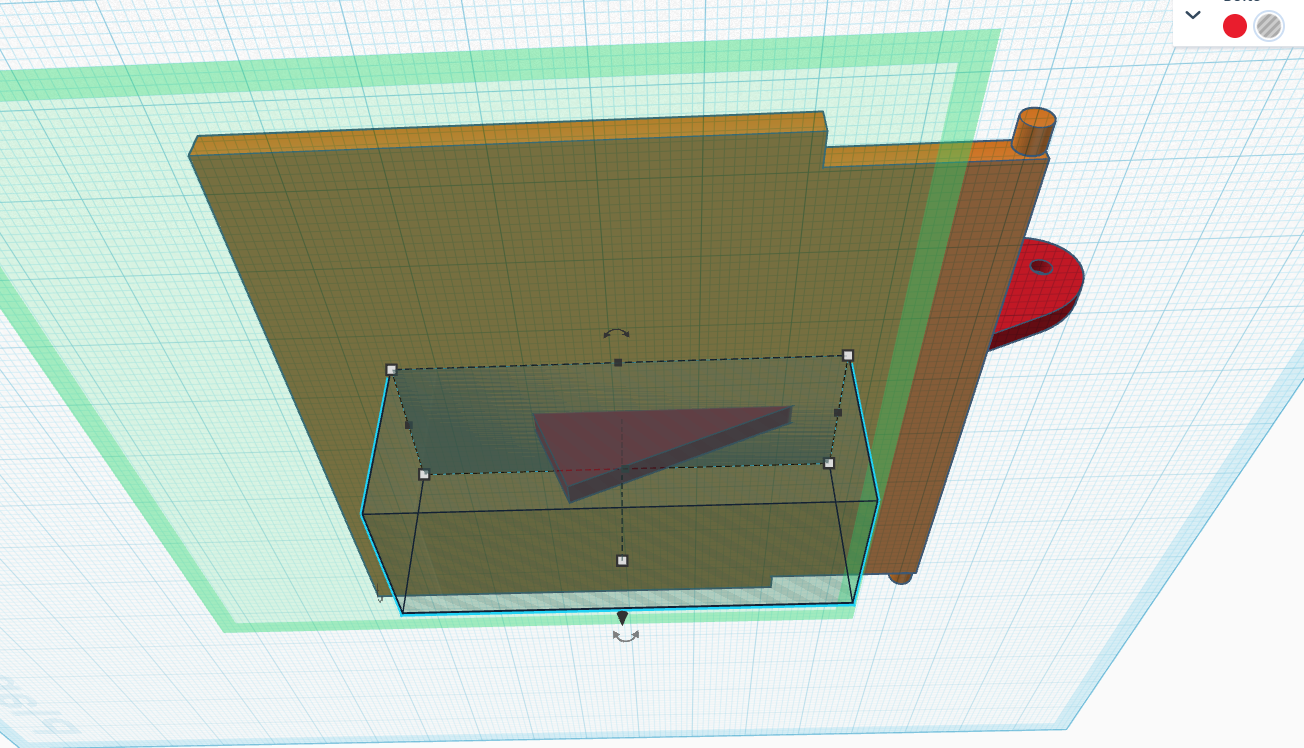
Faites une rotation (de -22.5° ou 22.5° en fonction du sens dans lequel vous travaillez) comme ci-dessous :
[](https://innovation.iha.unistra.fr/uploads/images/gallery/2026-02/za7image.png)[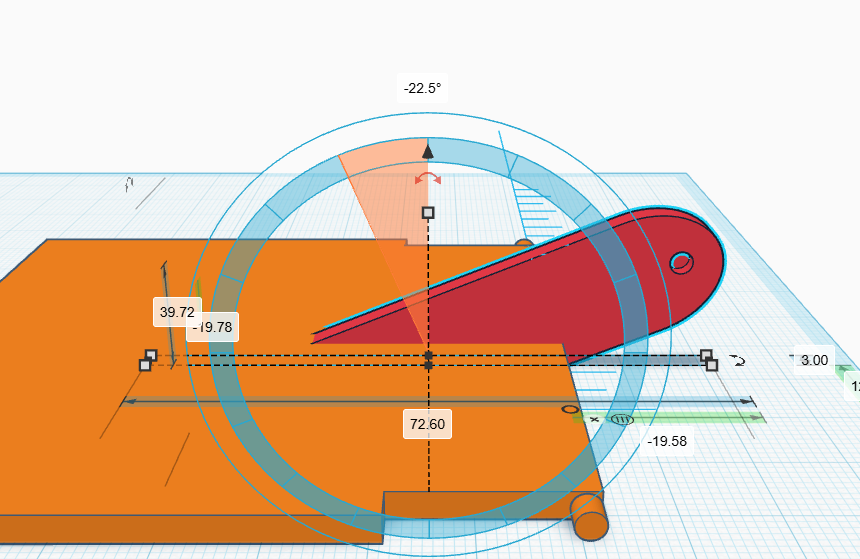](https://innovation.iha.unistra.fr/uploads/images/gallery/2026-02/Tq3image.png)
Utiliser la flèche verticale (voir image ci-dessous) pour mettre la pièce à -11 mm de haut :
[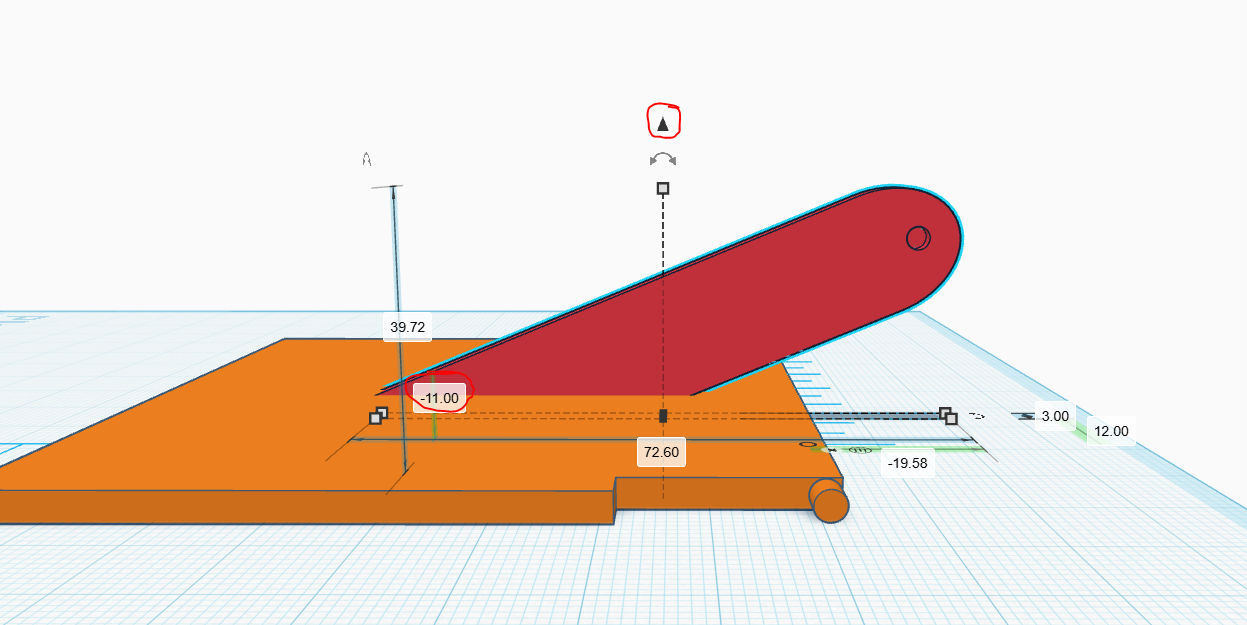](https://innovation.iha.unistra.fr/uploads/images/gallery/2026-02/0d5image.png)
Supprimer le reste de notre forme en créant un nouveau bloc en mode "perçage" et le positionner sous la pièce.
[](https://innovation.iha.unistra.fr/uploads/images/gallery/2026-02/vA6image.png)
Sélectionner tout le modèle (CTRL + A) et appuyer sur l'outil "Regrouper" pour obtenir notre couvercle.
[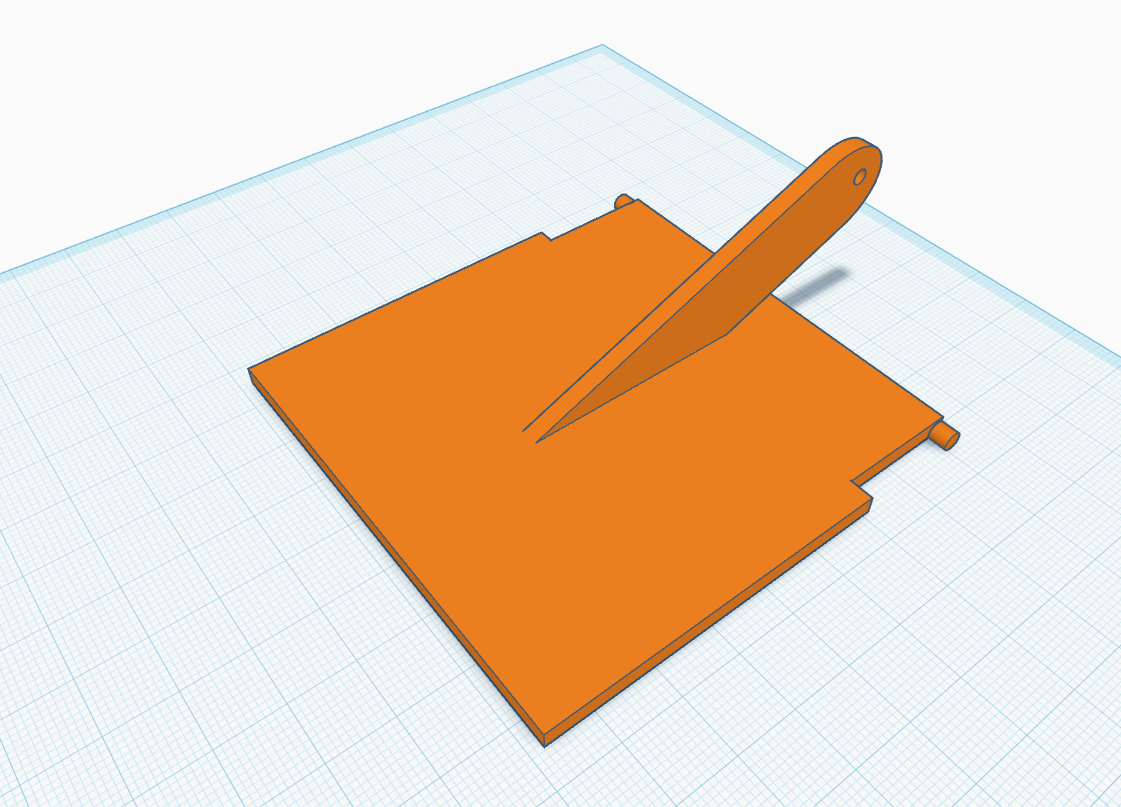](https://innovation.iha.unistra.fr/uploads/images/gallery/2026-02/QpNimage.png)
# Utilisation de la découpe laser pour le mécanisme de la poubelle à couvercle automatique
#### **Objectif :**
Initiation à la découpe laser et à l’utilisation du logiciel Inkscape.
#### **Modélisation :**
- > Si vous possédez déjà Inkscape sur votre ordinateur, ouvrez simplement le logiciel.
> Sinon, vous pouvez le télécharger à l’aide du lien suivant :
> [https://inkscape.fr/](https://inkscape.fr/)
>
> Pour en apprendre plus sur inkscape : https://innovation.iha.unistra.fr/books/2-fablab-formation-machines-logiciels/page/inkscape-petite-intro-pour-newbies
Une fois Inkscape ouvert, vous pouvez commencer la modélisation du mécanisme en bois.
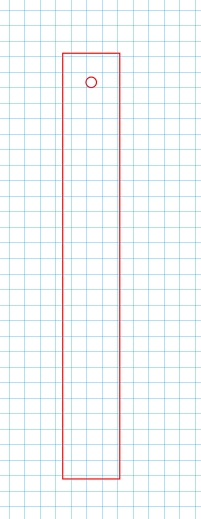
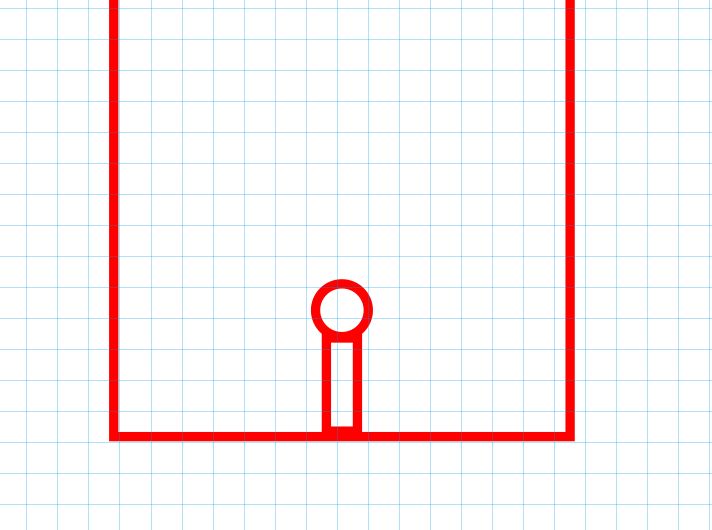
#### **Étape 1 : Création de la forme principale**
Vous devez créer un rectangle avec les dimensions suivantes :
- 15 mm de largeur
- 112 mm de hauteur
[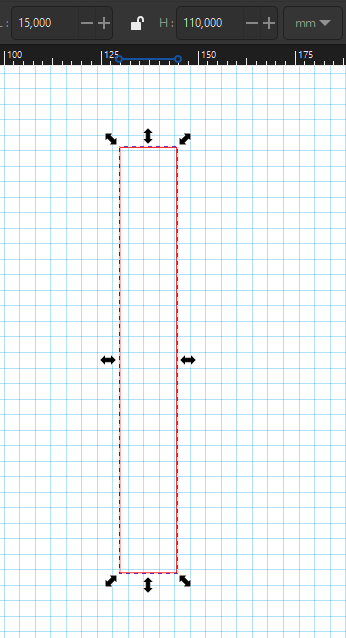](https://innovation.iha.unistra.fr/uploads/images/gallery/2026-02/dXAimage.png)
#### **Étape 2 : Création d'un trou d'accueil d'une vis pour la fixation au couvercle**
Ajouter un cercle avec les dimensions suivantes :
- 3 mm de largeur
- 3 mm de hauteur
Positionner ce cercle au centre du rectangle en sélectionnant les 2 formes et à l’aide de l’outil "Aligner", comme montré ci-dessous :
Si vous ne trouver pas l'outil, rendez vous dans l'onglet "Objet > Aligner et distribuer..."
[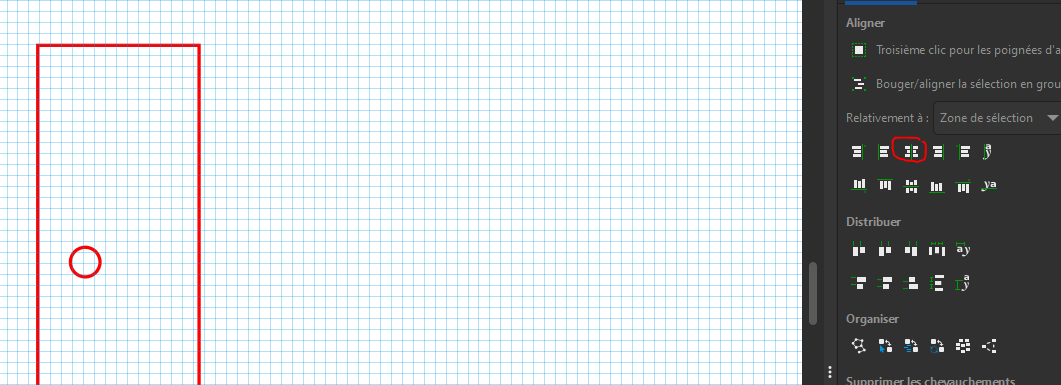](https://innovation.iha.unistra.fr/uploads/images/gallery/2026-02/mZqimage.png)
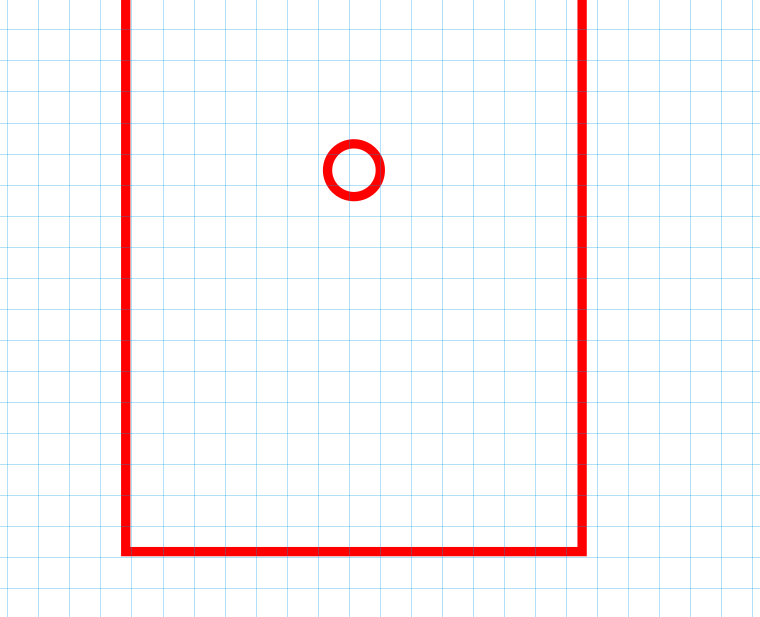
#### **Étape 3 : Positionnement du trou à 6 mm du bord supérieur**
Créer un autre rectangle servant de repère avec les dimensions suivantes :
- 6 mm de hauteur
- 2 mm de largeur
Positionner ce rectangle au niveau du bord supérieur, comme indiqué ci-dessous :
[](https://innovation.iha.unistra.fr/uploads/images/gallery/2026-02/TPYimage.png)
Placer le cercle de manière à ce qu’il soit correctement positionné à 6 mm du bord en vous aidant du rectangle de repère précédemment créé.
[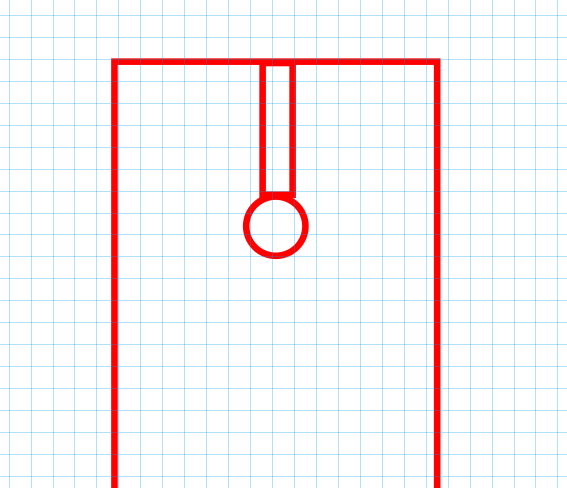](https://innovation.iha.unistra.fr/uploads/images/gallery/2026-02/Dyoimage.png)
Supprimer le rectangle utilisé comme repère, ce qui donne le résultat suivant :
[](https://innovation.iha.unistra.fr/uploads/images/gallery/2026-02/BBXimage.png)
#### **Étape 4 : Création du second trou d'accueil de vis pour la fixation au servomoteur**
Il manque maintenant le trou destiné à la vis reliée au servomoteur.
Créer un cercle avec les dimensions suivantes :
- 2 mm de largeur
- 2 mm de hauteur
Positionnez le au centre horizontal du rectangle (entre les bords droit et gauche) à l’aide du même outil d’alignement vu précédemment.
[](https://innovation.iha.unistra.fr/uploads/images/gallery/2026-02/n8bimage.png)
#### **Étape 5 : Positionnement vertical du second trou**
Pour positionner correctement ce cercle sur l’axe vertical (axe Y), vous devez créer un rectangle servant de repère avec les dimensions suivantes :
- 3 mm de hauteur
- 1 mm de largeur
Positionner ensuite les formes comme montré ci-dessous :
[](https://innovation.iha.unistra.fr/uploads/images/gallery/2026-02/sHVimage.png)
Une fois le cercle correctement placé, vous pouvez supprimer le rectangle utilisé comme repère.
#### **Étape 6 : Découpe au laser**
La modélisation du mécanisme en bois est maintenant terminée.
Il ne vous reste plus qu’à procéder à la découpe au laser si vous en disposez d'une.
# Fonctionnement et programmation des composants
#### **Objectif :**
Comprendre le fonctionnement des composants du projet et apprendre à les programmer
#### **1. Introduction à l'Arduino Nano**
##### Qu'est-ce qu'une Arduino Nano ?
L’Arduino Nano est une petite carte électronique programmable basée sur un microcontrôleur. Elle permet de créer facilement des projets interactifs, elle est donc le cerveau du projet. C'est l'Arduino Nano qui décidera de faire tourner le servomoteur en fonction de la longueur mesurée par le capteur à ultrason en exécutant le programme que vous lui avez donné.
Si vous n'avez jamais utilisé un Arduino Nano, rendez-vous sur cette page : [https://innovation.iha.unistra.fr/books/robotique-educative/page/quest-ce-que-larduino](https://innovation.iha.unistra.fr/books/robotique-educative/page/quest-ce-que-larduino)
#### **2. Capteur à ultrasons HC-SR04**
##### Qu'est ce qu'un capteur à ultrason et comment il fonctionne ?
Le capteur à ultrasons HC-SR04 est un dispositif utilisé pour mesurer des distances sans contact. Il fonctionne en émettant un ultrasons et en mesurant le temps mis par l’écho pour revenir après avoir heurté un obstacle. Simple à utiliser et peu coûteux, il permettra à l'Arduino Nano de détecter votre main afin de donner un signal au servomoteur et d'ouvrir le couvercle de la poubelle.
Si vous n'avez jamais utilisé un capteur à ultrasons, rendez-vous sur cette page : [https://innovation.iha.unistra.fr/books/robotique-educative/page/quest-ce-quun-capteur-a-ultrasons](https://innovation.iha.unistra.fr/books/robotique-educative/page/quest-ce-quun-capteur-a-ultrasons)
#### **3. Servomoteur SG90 180°**
##### Qu'est ce qu'un servomoteur et comment il fonctionne ?
Le servomoteur SG90 180° est un petit moteur électrique capable de se positionner avec précision sur un angle allant de 0 à 180 degrés. Il permettra à notre poubelle d'ouvrir son couvercle grâce à la rotation et la force exercée par celui-ci sur le couvercle.
Si vous n'avez jamais utilisé un servomoteur, rendez-vous sur cette page : [https://innovation.iha.unistra.fr/books/robotique-educative/page/quest-ce-quun-servo-moteur](https://innovation.iha.unistra.fr/books/robotique-educative/page/quest-ce-quun-servo-moteur)
# Assemblage et câblage de la poubelle à couvercle automatique
#### **Objectif de la séance :**
Réaliser l’assemblage complet de la poubelle à couvercle automatique.
#### **1. Assemblage du capteur à ultrasons**
**Le modèle 3D de la poubelle à imprimer en 3D ce trouve en pièce jointe du wiki**
Vous devez positionner le capteur à ultrasons de la manière suivante :
[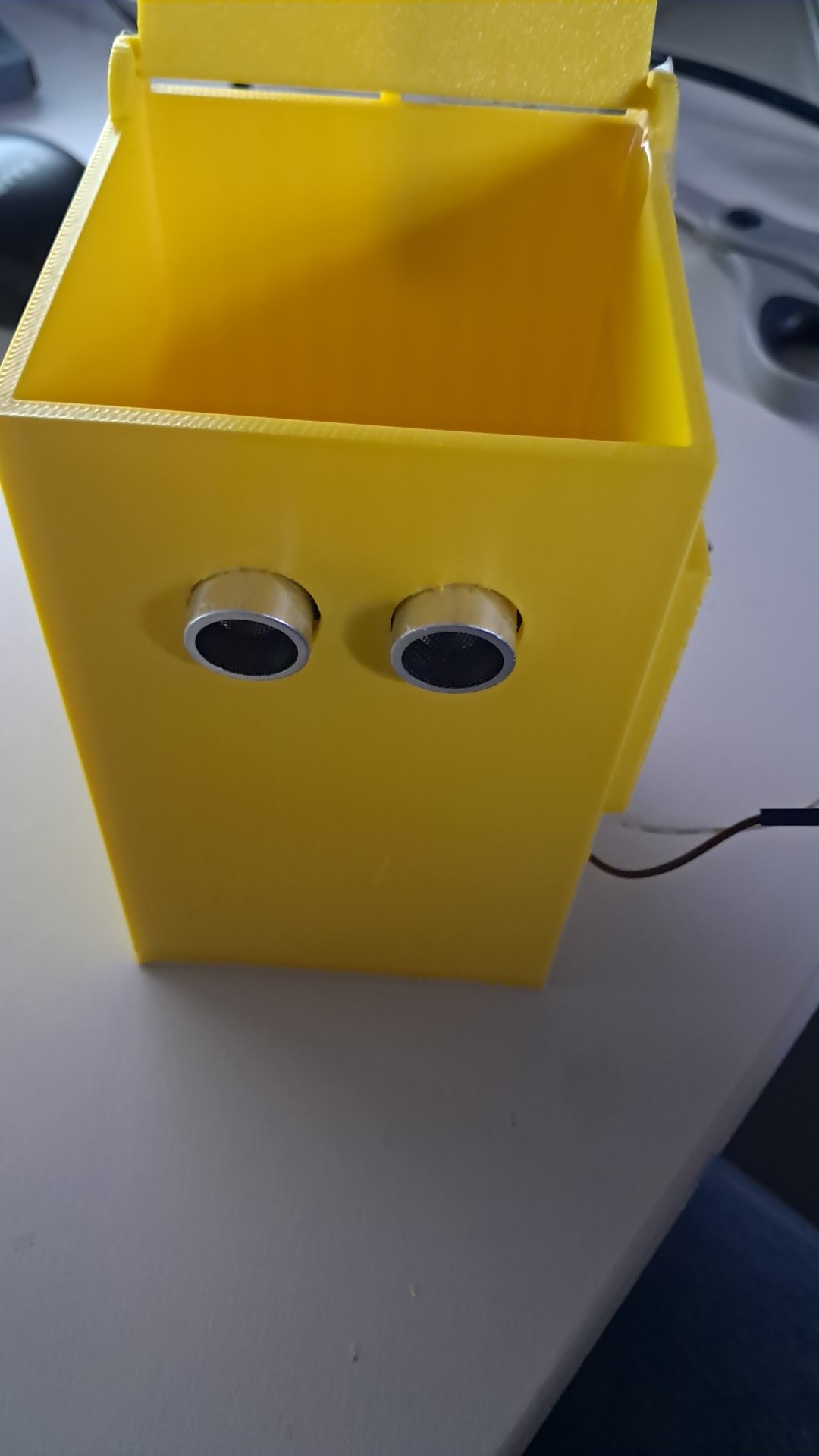](https://innovation.iha.unistra.fr/uploads/images/gallery/2026-02/snapchat-1872395610.jpg)[](https://innovation.iha.unistra.fr/uploads/images/gallery/2026-02/snapchat-42481692.jpg)
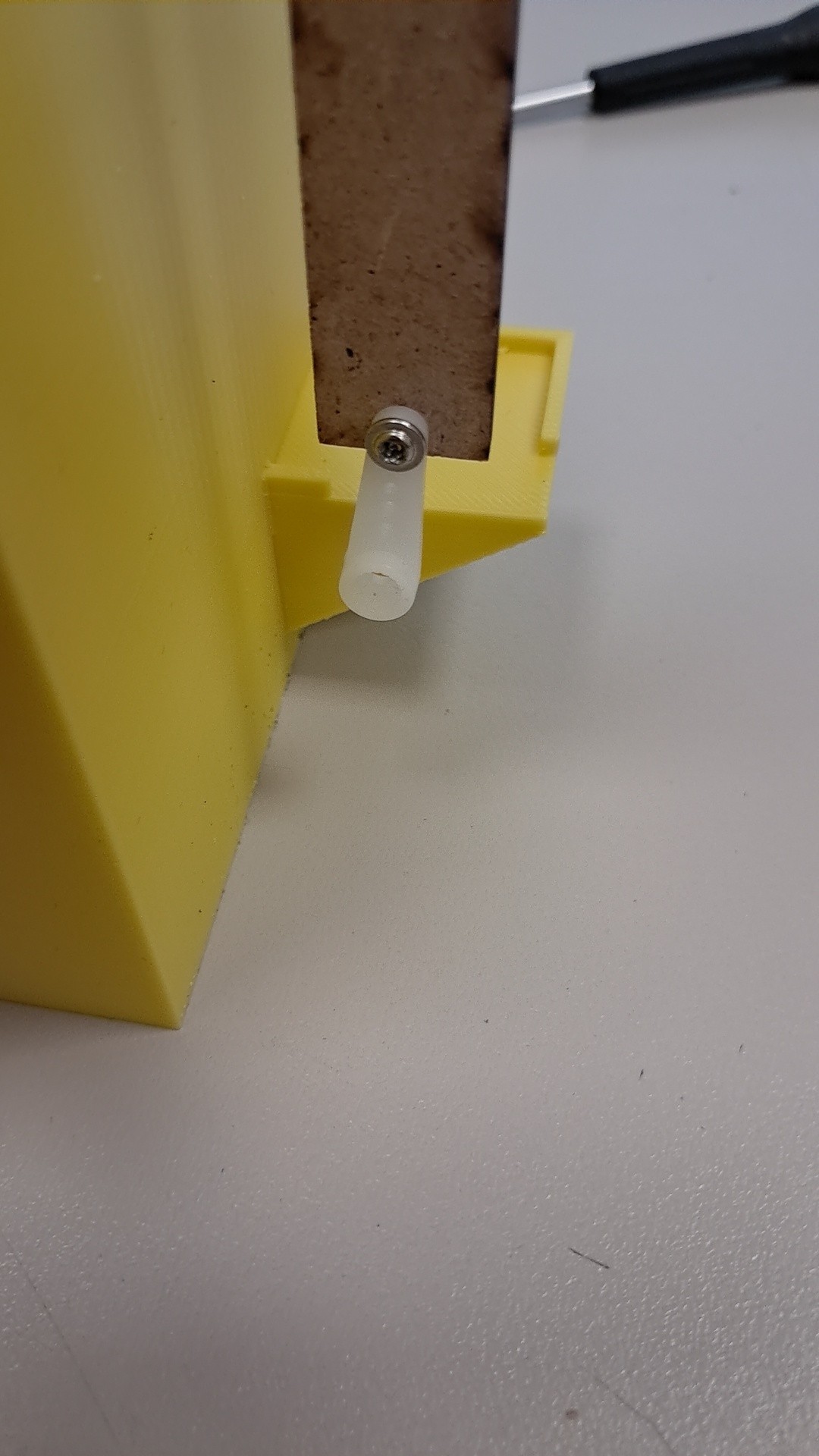
Ensuite, vous devez faire passer les fils par le petit trou situé en bas à droite du capteur à ultrasons, comme indiqué ci-dessous :
[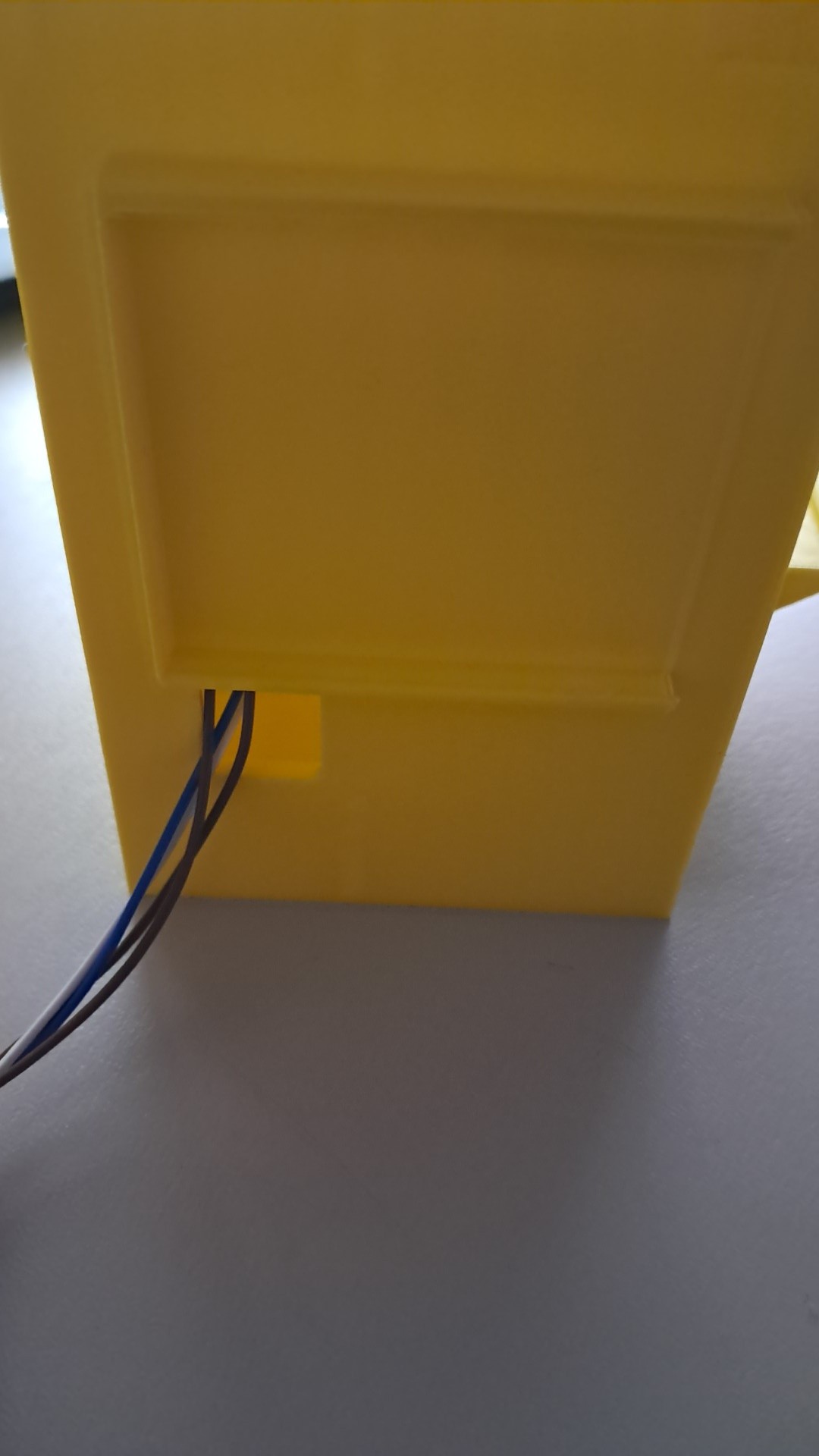](https://innovation.iha.unistra.fr/uploads/images/gallery/2026-02/snapchat-1282883205.jpg)
Une fois le capteur à ultrasons correctement installé, vous pouvez passer à l’installation de la carte Arduino.
Vous devez glisser votre **Arduino Nano**, accompagné de son **shield**, dans l’encoche prévue à cet effet, comme montré ci-dessous :
[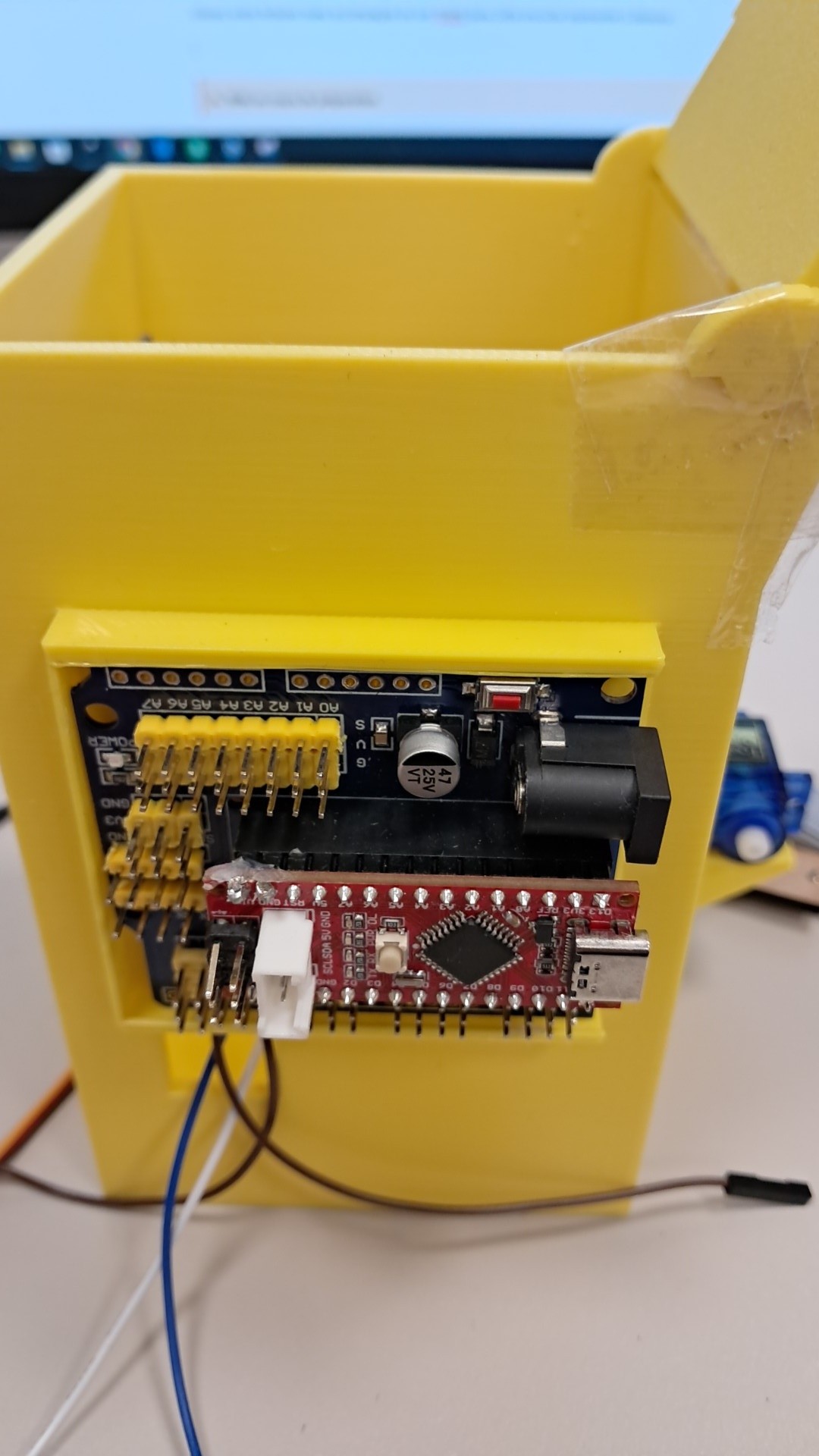](https://innovation.iha.unistra.fr/uploads/images/gallery/2026-02/snapchat-1512569101.jpg)[](https://innovation.iha.unistra.fr/uploads/images/gallery/2026-02/snapchat-226701473.jpg)
Une fois la carte installée dans son support, vous pouvez clipser le couvercle sur la boîte, comme illustré ci-dessous :
[](https://innovation.iha.unistra.fr/uploads/images/gallery/2026-02/snapchat-469856752.jpg)[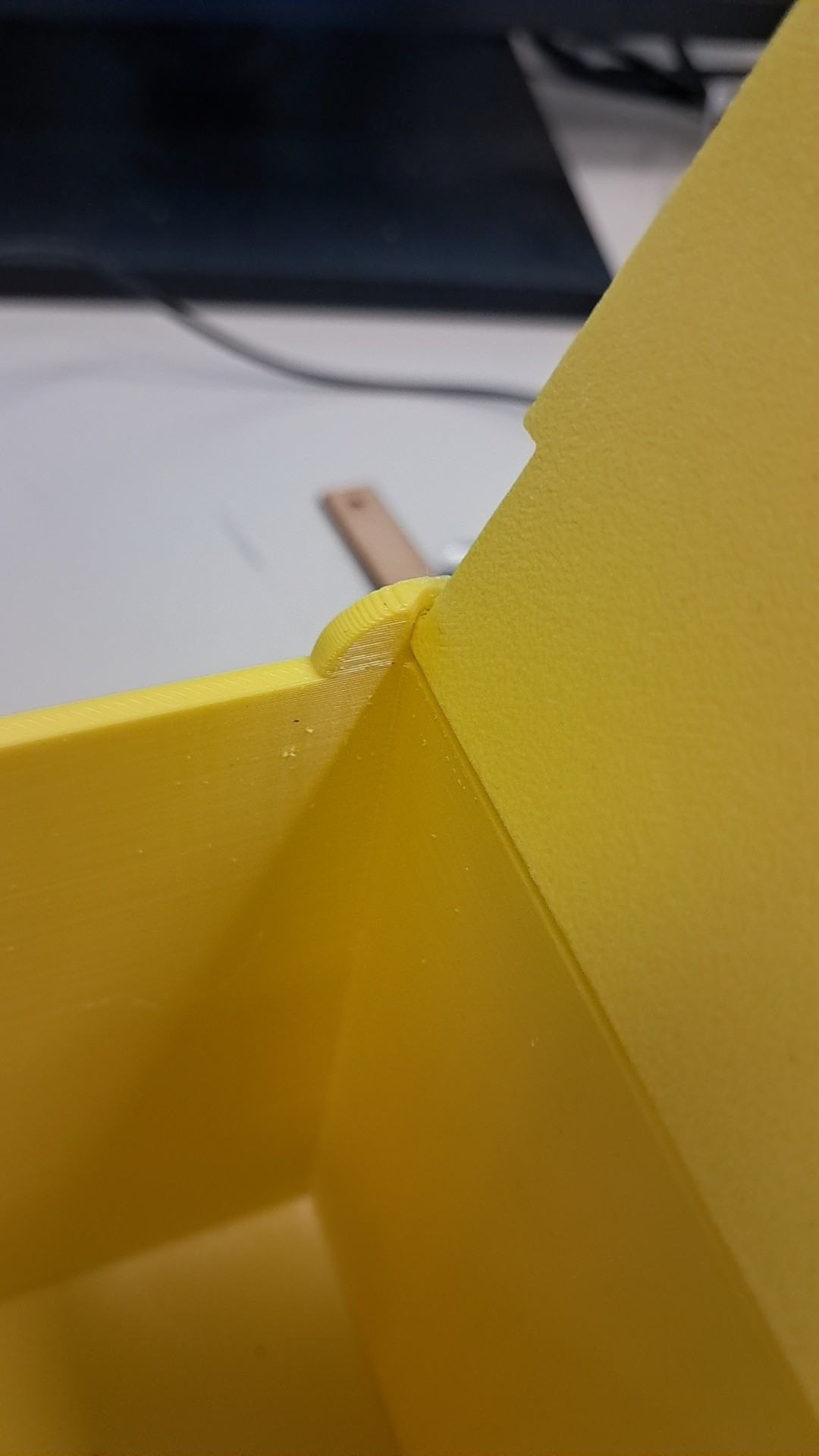](https://innovation.iha.unistra.fr/uploads/images/gallery/2026-02/snapchat-78847917.jpg)
Lorsque cette partie technique est terminée, vous pouvez passer à l’assemblage du mécanisme en bois.
Pour cette étape, vous aurez besoin de :
- 1 vis M3 12
- 1 écrou M3
- 1 vis de servomoteur
- 1 tournevis
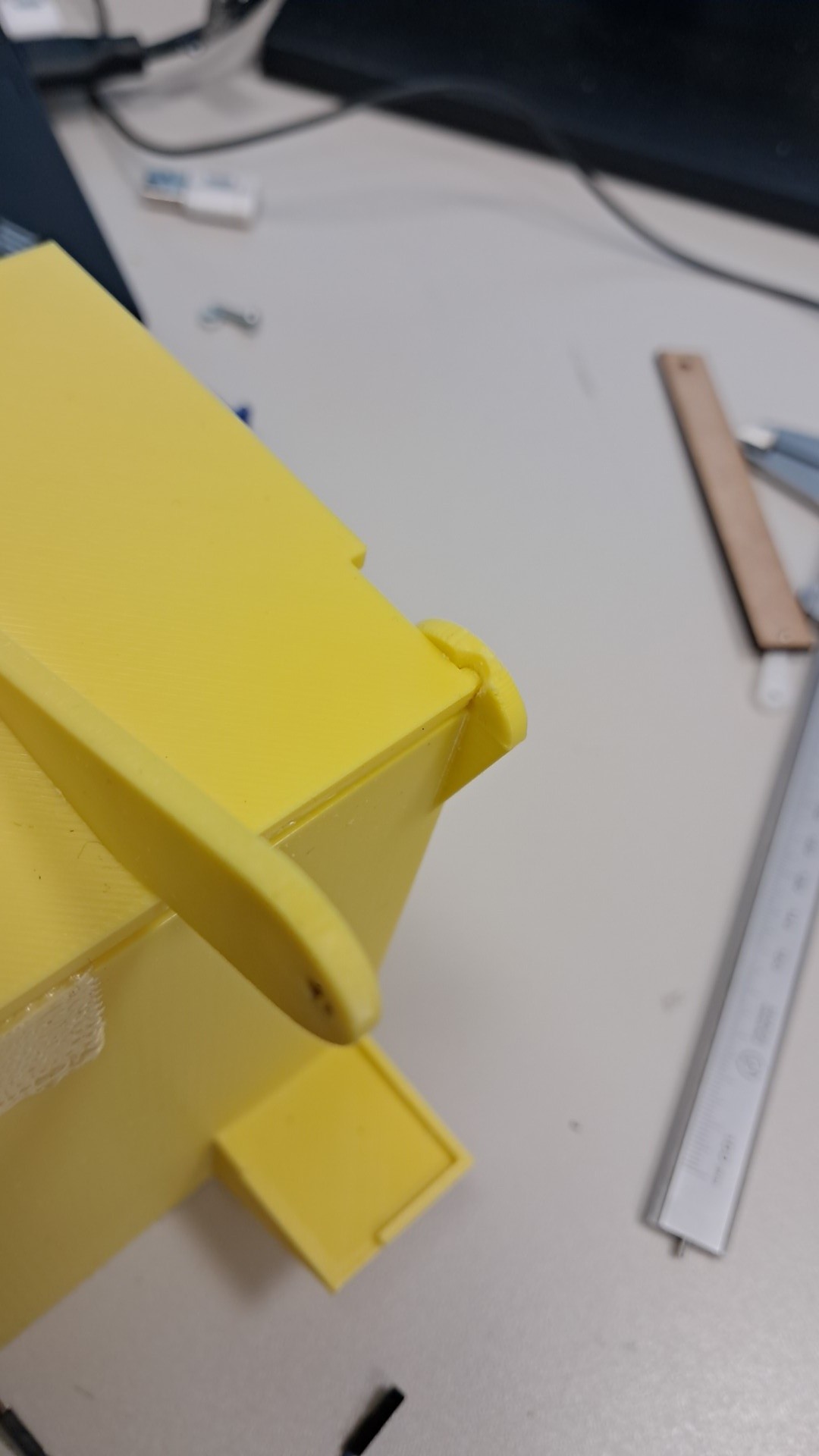
Dans le plus grand trou de la languette en bois, vous devez insérer la vis M3 12, puis l’insérer également dans la languette du couvercle, comme indiqué ci-dessous :
[](https://innovation.iha.unistra.fr/uploads/images/gallery/2026-02/snapchat-1350187167.jpg)
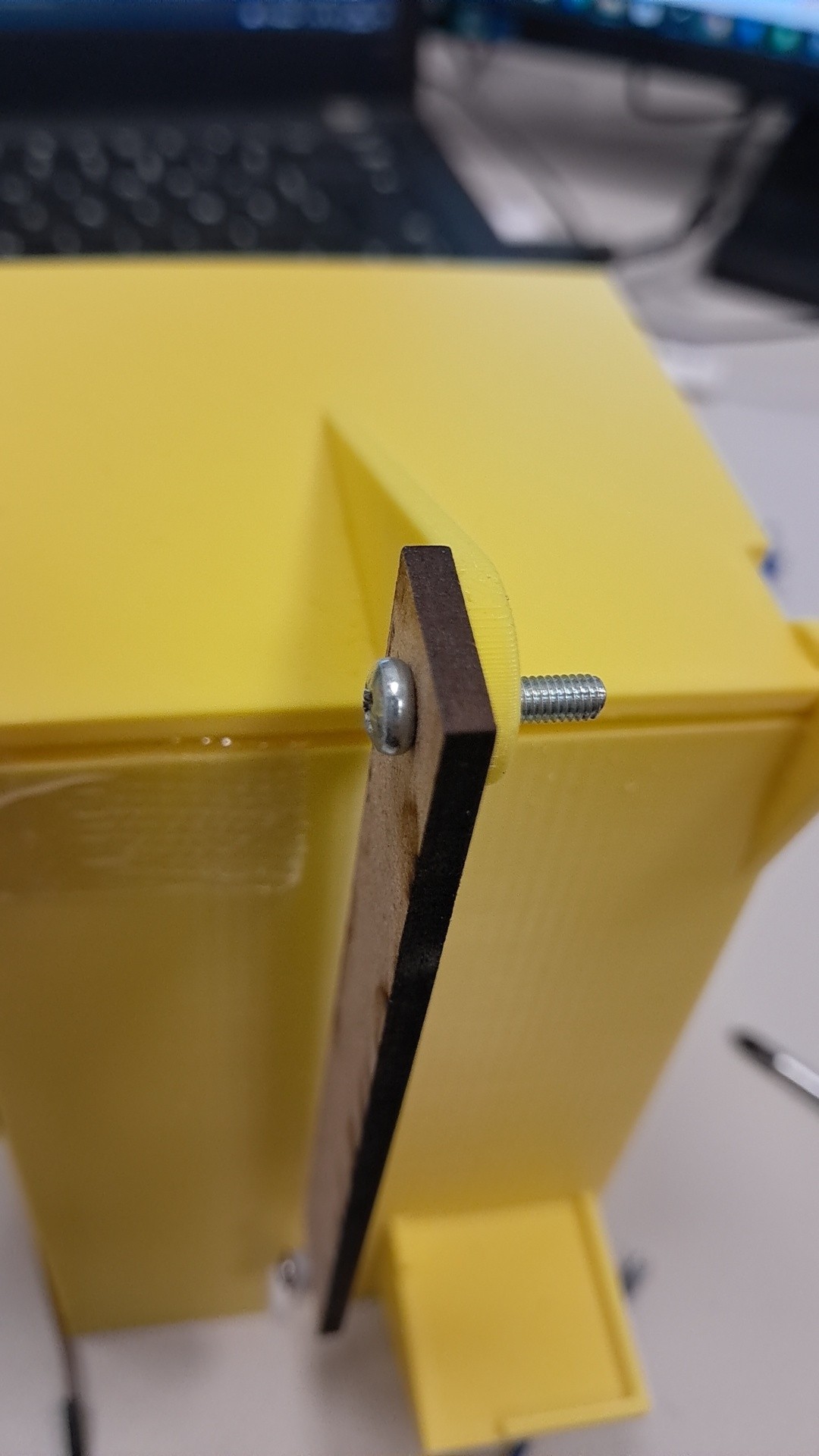
Vous devez ensuite ajouter l’écrou M3, comme montré ci-dessous :
[](https://innovation.iha.unistra.fr/uploads/images/gallery/2026-02/snapchat-981636419.jpg)
Une fois le côté couvercle terminé, il ne reste plus qu’à réaliser le montage côté servomoteur.
Pour cela, vous devez utiliser une vis de servomoteur et y fixer un palonnier avec un axe uniquement, comme sur l’image suivante :
[](https://innovation.iha.unistra.fr/uploads/images/gallery/2026-02/snapchat-1692850722.jpg)
Vous devez maintenant ajouter le servomoteur, Mais avant de le positionner il faut l'initialiser. Pour cela mettez un palonnier sur le servomoteur et tournez le dans le sens inverse des aiguilles d'une montre sans forcer. Une fois arivé au bout votre servomoteur sera donc a 0°. Une fois fait positionnez simplement le servomoteur sur son siège.
Puis, ajoutez la pièce en forme de **U** afin de le maintenir en place, comme montré ci-dessous :
[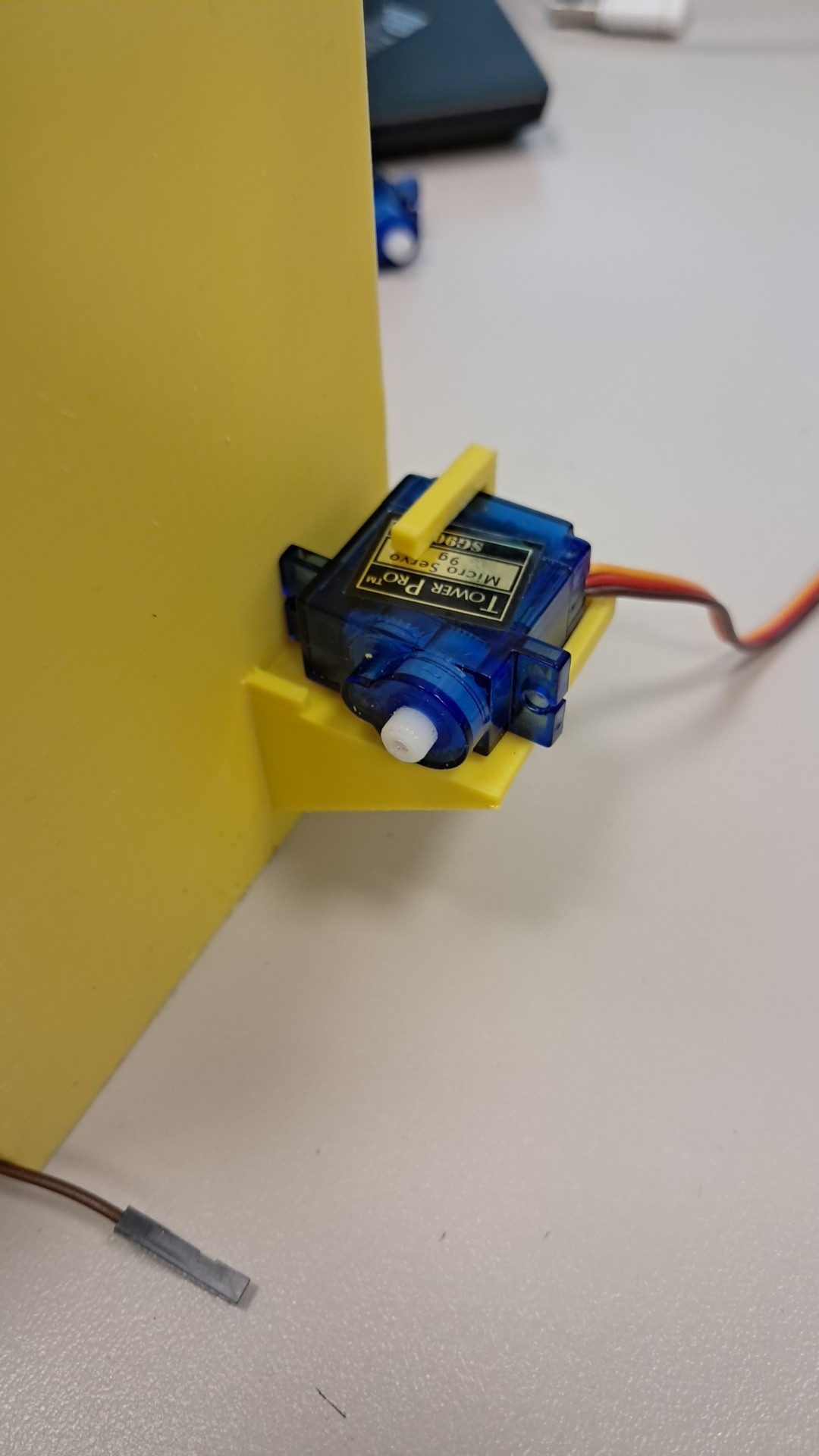](https://innovation.iha.unistra.fr/uploads/images/gallery/2026-02/snapchat-2138532086.jpg)
Une fois tous les composants en place, il ne reste plus qu’à clipser le palonnier sur le servomoteur, comme indiqué ci-dessous :
[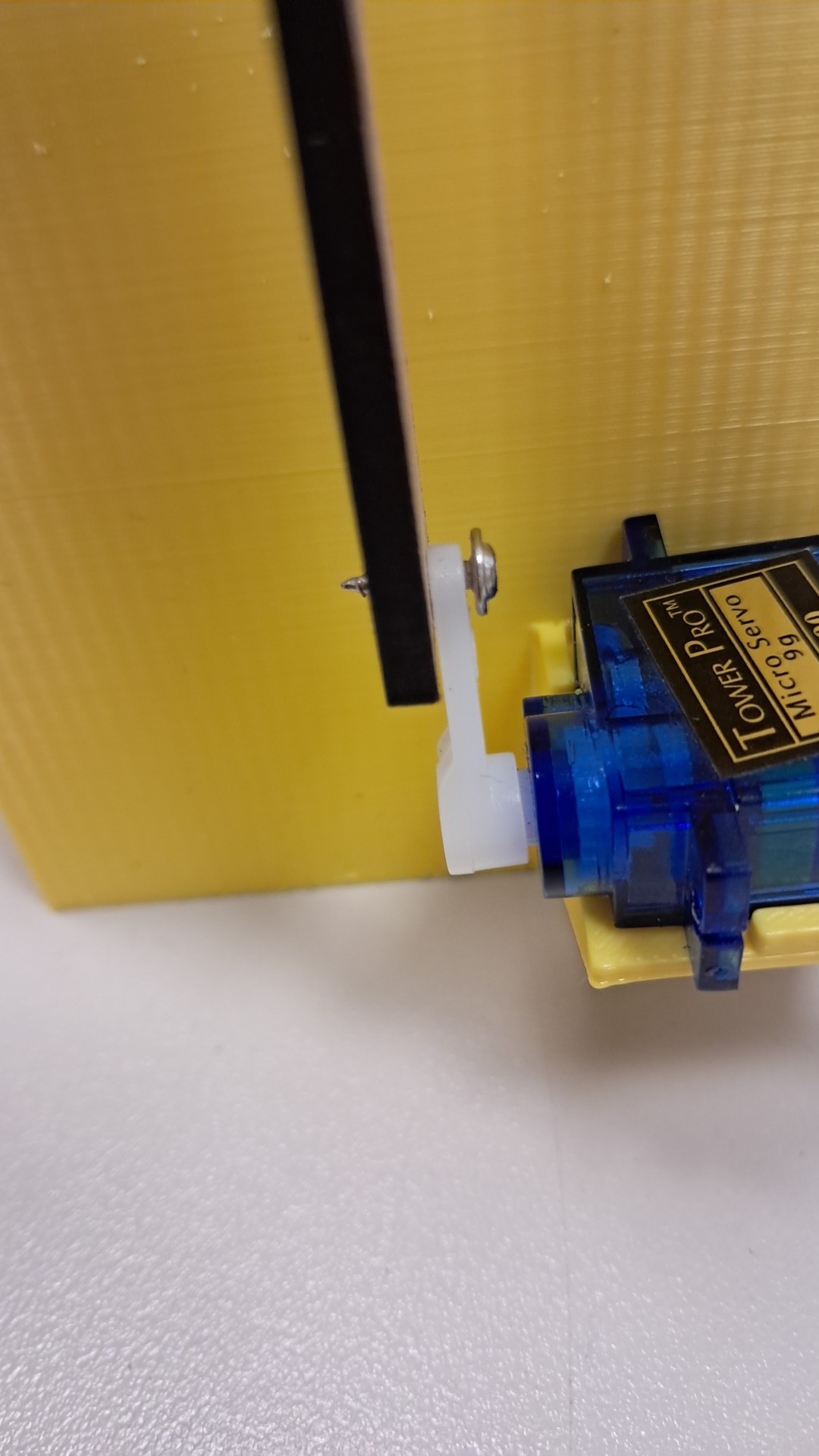](https://innovation.iha.unistra.fr/uploads/images/gallery/2026-02/snapchat-2143529303.jpg)
L’assemblage est maintenant terminé.
#### **Câblage**
Afin que les composants puissent communiquer entre eux, vous devez maintenant réaliser le câblage.
Voici les broches utilisées :
##### **Capteur à ultrasons (HC-SR04)**
- VCC → 5V de l’Arduino
- GND → GND de l’Arduino
- TRIG → D9 de l’Arduino
- ECHO → D10 de l’Arduino
##### **Servomoteur**
- VCC (fil rouge) → 5V de l’Arduino
- GND (fil noir) → GND de l’Arduino
- Signal (fil jaune) → D12 de l’Arduino
Le montage final doit ressembler à l’exemple ci-dessous
[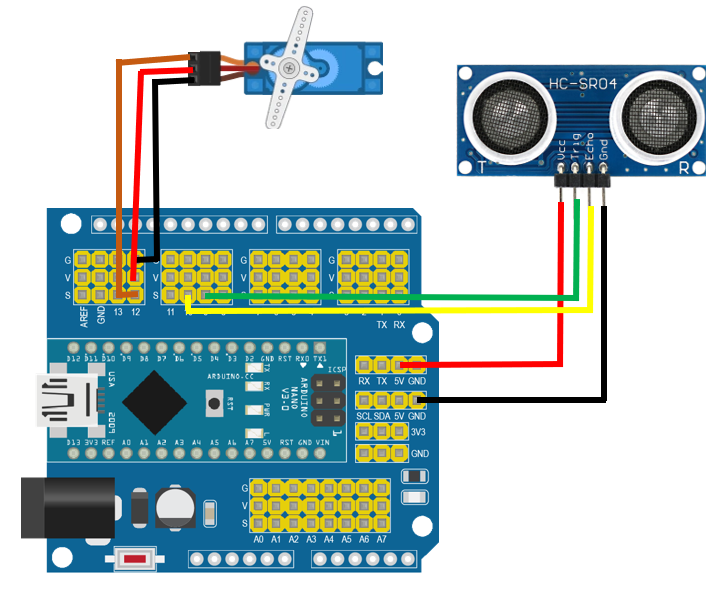](https://innovation.iha.unistra.fr/uploads/images/gallery/2026-02/7ajimage.png)
# Programmation de la poubelle à couvercle automatique
#### **Objectif**
Gestion et programmation de l’ensemble des capteurs et actionneurs d’une poubelle à couvercle automatique.
#### **Rappel**
Pour programmer la poubelle a couvercle automatique il faut avoir préalablement fait les étapes précédentes disponible [ici](https://innovation.iha.unistra.fr/books/robotique-educative/chapter/club-robotique-poubelle-a-couvercle-automatique)
#### **Exercice – Programmer la poubelle a couvercle automatique**
##### **Objectif pédagogique**
Associer un **capteur** à un **actionneur** pour automatiser un mécanisme.
##### **Etape 1**
Réfléchir à un algorithme.
##### **Correction :**
Lorsque l'Arduino Nano démarre
Initialiser l'ultrason
Pour toujours
Calculer la distance avec l'ultrason
Si la distance est inférieur à 5cm Alors
Positionner le servomoteur à 180° (position du couvercle ouvert)
Attendre 2 secondes.
Sinon
Positionner le servomoteur à 0° (position du couvercle fermé)
[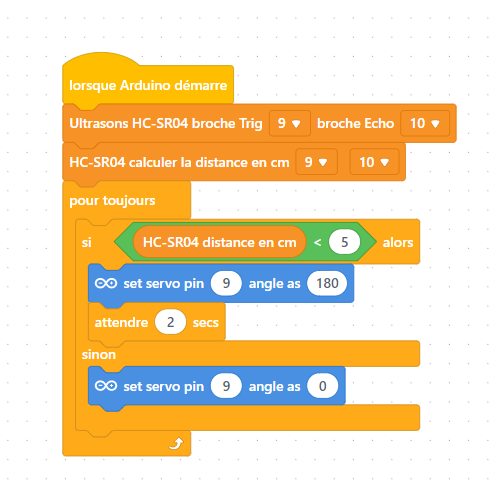](https://innovation.iha.unistra.fr/uploads/images/gallery/2026-02/50Zimage.png)
- Empêcher le servomoteur de bouger inutilement si le couvercle est déjà ouvert.
- Modifier l’angle d’ouverture (ex : 90° au lieu de 0°).
- Ajouter un délai avant la fermeture automatique.
- expliquer le rôle du servomoteur,
- décrire la logique complète de la poubelle automatique,
- modifier seul les paramètres (distance, angle, temps).
---
- comment **un capteur déclenche une action**,
- comment structurer un programme Arduino,
- comment automatiser un objet du quotidien.
##### **Correction du code :**
Voici la correction du code :
[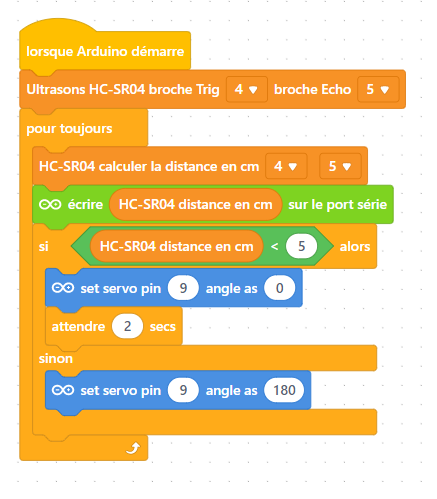](https://innovation.iha.unistra.fr/uploads/images/gallery/2026-02/hxximage.png)
Ce programme met en œuvre un **système d’ouverture automatique de couvercle** basé sur la détection de proximité, typiquement utilisé pour une **poubelle robotisée sans contact** dans un club de robotique.
##### **Principe général**
Le code associe :
- un **capteur à ultrasons HC-SR04** pour mesurer la distance entre la poubelle et un obstacle (main, déchet, objet),
- un **servomoteur SG90 (180°)** pour actionner mécaniquement le couvercle.
L’objectif est d’ouvrir le couvercle lorsqu’un utilisateur s’approche, puis de le refermer automatiquement.
##### **Déroulement du programme**
1. **Initialisation au démarrage**
- L’Arduino configure le capteur HC-SR04 avec :
- broche **Trig = 4**
- broche **Echo = 5**
- Le servomoteur est connecté à la **broche 9**.
2. **Boucle de fonctionnement continu**
- Le capteur ultrason mesure en permanence la **distance en centimètres** devant la poubelle.
- Cette distance est envoyée sur le **port série**, ce qui permet :
- le débogage,
- la visualisation du comportement du système,
- l’analyse pédagogique avec les membres du club.
3. **Logique de décision**
- **Si la distance mesurée est inférieure à 5 cm** :
- le servomoteur est positionné à **0°** → **ouverture du couvercle**,
- une temporisation de **2 secondes** permet à l’utilisateur de jeter le déchet.
- **Sinon** :
- le servomoteur est positionné à **180°** → **fermeture du couvercle**.
Si vous ne trouver pas l'outil, rendez vous dans l'onglet "Objet > Aligner et distribuer..."
[](https://innovation.iha.unistra.fr/uploads/images/gallery/2026-02/mZqimage.png)
#### **Étape 3 : Positionnement du trou à 6 mm du bord supérieur**
Créer un autre rectangle servant de repère avec les dimensions suivantes :
- 6 mm de hauteur
- 2 mm de largeur
Positionner ce rectangle au niveau du bord supérieur, comme indiqué ci-dessous :
[](https://innovation.iha.unistra.fr/uploads/images/gallery/2026-02/TPYimage.png)
Placer le cercle de manière à ce qu’il soit correctement positionné à 6 mm du bord en vous aidant du rectangle de repère précédemment créé.
[](https://innovation.iha.unistra.fr/uploads/images/gallery/2026-02/Dyoimage.png)
Supprimer le rectangle utilisé comme repère, ce qui donne le résultat suivant :
[](https://innovation.iha.unistra.fr/uploads/images/gallery/2026-02/BBXimage.png)
#### **Étape 4 : Création du second trou d'accueil de vis pour la fixation au servomoteur**
Il manque maintenant le trou destiné à la vis reliée au servomoteur.
Créer un cercle avec les dimensions suivantes :
- 2 mm de largeur
- 2 mm de hauteur
Positionnez le au centre horizontal du rectangle (entre les bords droit et gauche) à l’aide du même outil d’alignement vu précédemment.
[](https://innovation.iha.unistra.fr/uploads/images/gallery/2026-02/n8bimage.png)
#### **Étape 5 : Positionnement vertical du second trou**
Pour positionner correctement ce cercle sur l’axe vertical (axe Y), vous devez créer un rectangle servant de repère avec les dimensions suivantes :
- 3 mm de hauteur
- 1 mm de largeur
Positionner ensuite les formes comme montré ci-dessous :
[](https://innovation.iha.unistra.fr/uploads/images/gallery/2026-02/sHVimage.png)
Une fois le cercle correctement placé, vous pouvez supprimer le rectangle utilisé comme repère.
#### **Étape 6 : Découpe au laser**
La modélisation du mécanisme en bois est maintenant terminée.
Il ne vous reste plus qu’à procéder à la découpe au laser si vous en disposez d'une.
# Fonctionnement et programmation des composants
#### **Objectif :**
Comprendre le fonctionnement des composants du projet et apprendre à les programmer
#### **1. Introduction à l'Arduino Nano**
##### Qu'est-ce qu'une Arduino Nano ?
L’Arduino Nano est une petite carte électronique programmable basée sur un microcontrôleur. Elle permet de créer facilement des projets interactifs, elle est donc le cerveau du projet. C'est l'Arduino Nano qui décidera de faire tourner le servomoteur en fonction de la longueur mesurée par le capteur à ultrason en exécutant le programme que vous lui avez donné.
Si vous n'avez jamais utilisé un Arduino Nano, rendez-vous sur cette page : [https://innovation.iha.unistra.fr/books/robotique-educative/page/quest-ce-que-larduino](https://innovation.iha.unistra.fr/books/robotique-educative/page/quest-ce-que-larduino)
#### **2. Capteur à ultrasons HC-SR04**
##### Qu'est ce qu'un capteur à ultrason et comment il fonctionne ?
Le capteur à ultrasons HC-SR04 est un dispositif utilisé pour mesurer des distances sans contact. Il fonctionne en émettant un ultrasons et en mesurant le temps mis par l’écho pour revenir après avoir heurté un obstacle. Simple à utiliser et peu coûteux, il permettra à l'Arduino Nano de détecter votre main afin de donner un signal au servomoteur et d'ouvrir le couvercle de la poubelle.
Si vous n'avez jamais utilisé un capteur à ultrasons, rendez-vous sur cette page : [https://innovation.iha.unistra.fr/books/robotique-educative/page/quest-ce-quun-capteur-a-ultrasons](https://innovation.iha.unistra.fr/books/robotique-educative/page/quest-ce-quun-capteur-a-ultrasons)
#### **3. Servomoteur SG90 180°**
##### Qu'est ce qu'un servomoteur et comment il fonctionne ?
Le servomoteur SG90 180° est un petit moteur électrique capable de se positionner avec précision sur un angle allant de 0 à 180 degrés. Il permettra à notre poubelle d'ouvrir son couvercle grâce à la rotation et la force exercée par celui-ci sur le couvercle.
Si vous n'avez jamais utilisé un servomoteur, rendez-vous sur cette page : [https://innovation.iha.unistra.fr/books/robotique-educative/page/quest-ce-quun-servo-moteur](https://innovation.iha.unistra.fr/books/robotique-educative/page/quest-ce-quun-servo-moteur)
# Assemblage et câblage de la poubelle à couvercle automatique
#### **Objectif de la séance :**
Réaliser l’assemblage complet de la poubelle à couvercle automatique.
#### **1. Assemblage du capteur à ultrasons**
**Le modèle 3D de la poubelle à imprimer en 3D ce trouve en pièce jointe du wiki**
Vous devez positionner le capteur à ultrasons de la manière suivante :
[](https://innovation.iha.unistra.fr/uploads/images/gallery/2026-02/snapchat-1872395610.jpg)[](https://innovation.iha.unistra.fr/uploads/images/gallery/2026-02/snapchat-42481692.jpg)
Ensuite, vous devez faire passer les fils par le petit trou situé en bas à droite du capteur à ultrasons, comme indiqué ci-dessous :
[](https://innovation.iha.unistra.fr/uploads/images/gallery/2026-02/snapchat-1282883205.jpg)
Une fois le capteur à ultrasons correctement installé, vous pouvez passer à l’installation de la carte Arduino.
Vous devez glisser votre **Arduino Nano**, accompagné de son **shield**, dans l’encoche prévue à cet effet, comme montré ci-dessous :
[](https://innovation.iha.unistra.fr/uploads/images/gallery/2026-02/snapchat-1512569101.jpg)[](https://innovation.iha.unistra.fr/uploads/images/gallery/2026-02/snapchat-226701473.jpg)
Une fois la carte installée dans son support, vous pouvez clipser le couvercle sur la boîte, comme illustré ci-dessous :
[](https://innovation.iha.unistra.fr/uploads/images/gallery/2026-02/snapchat-469856752.jpg)[](https://innovation.iha.unistra.fr/uploads/images/gallery/2026-02/snapchat-78847917.jpg)
Lorsque cette partie technique est terminée, vous pouvez passer à l’assemblage du mécanisme en bois.
Pour cette étape, vous aurez besoin de :
- 1 vis M3 12
- 1 écrou M3
- 1 vis de servomoteur
- 1 tournevis
Dans le plus grand trou de la languette en bois, vous devez insérer la vis M3 12, puis l’insérer également dans la languette du couvercle, comme indiqué ci-dessous :
[](https://innovation.iha.unistra.fr/uploads/images/gallery/2026-02/snapchat-1350187167.jpg)
Vous devez ensuite ajouter l’écrou M3, comme montré ci-dessous :
[](https://innovation.iha.unistra.fr/uploads/images/gallery/2026-02/snapchat-981636419.jpg)
Une fois le côté couvercle terminé, il ne reste plus qu’à réaliser le montage côté servomoteur.
Pour cela, vous devez utiliser une vis de servomoteur et y fixer un palonnier avec un axe uniquement, comme sur l’image suivante :
[](https://innovation.iha.unistra.fr/uploads/images/gallery/2026-02/snapchat-1692850722.jpg)
Vous devez maintenant ajouter le servomoteur, Mais avant de le positionner il faut l'initialiser. Pour cela mettez un palonnier sur le servomoteur et tournez le dans le sens inverse des aiguilles d'une montre sans forcer. Une fois arivé au bout votre servomoteur sera donc a 0°. Une fois fait positionnez simplement le servomoteur sur son siège.
Puis, ajoutez la pièce en forme de **U** afin de le maintenir en place, comme montré ci-dessous :
[](https://innovation.iha.unistra.fr/uploads/images/gallery/2026-02/snapchat-2138532086.jpg)
Une fois tous les composants en place, il ne reste plus qu’à clipser le palonnier sur le servomoteur, comme indiqué ci-dessous :
[](https://innovation.iha.unistra.fr/uploads/images/gallery/2026-02/snapchat-2143529303.jpg)
L’assemblage est maintenant terminé.
#### **Câblage**
Afin que les composants puissent communiquer entre eux, vous devez maintenant réaliser le câblage.
Voici les broches utilisées :
##### **Capteur à ultrasons (HC-SR04)**
- VCC → 5V de l’Arduino
- GND → GND de l’Arduino
- TRIG → D9 de l’Arduino
- ECHO → D10 de l’Arduino
##### **Servomoteur**
- VCC (fil rouge) → 5V de l’Arduino
- GND (fil noir) → GND de l’Arduino
- Signal (fil jaune) → D12 de l’Arduino
Le montage final doit ressembler à l’exemple ci-dessous
[](https://innovation.iha.unistra.fr/uploads/images/gallery/2026-02/7ajimage.png)
# Programmation de la poubelle à couvercle automatique
#### **Objectif**
Gestion et programmation de l’ensemble des capteurs et actionneurs d’une poubelle à couvercle automatique.
#### **Rappel**
Pour programmer la poubelle a couvercle automatique il faut avoir préalablement fait les étapes précédentes disponible [ici](https://innovation.iha.unistra.fr/books/robotique-educative/chapter/club-robotique-poubelle-a-couvercle-automatique)
#### **Exercice – Programmer la poubelle a couvercle automatique**
##### **Objectif pédagogique**
Associer un **capteur** à un **actionneur** pour automatiser un mécanisme.
##### **Etape 1**
Réfléchir à un algorithme.
##### **Correction :**
Lorsque l'Arduino Nano démarre
Initialiser l'ultrason
Pour toujours
Calculer la distance avec l'ultrason
Si la distance est inférieur à 5cm Alors
Positionner le servomoteur à 180° (position du couvercle ouvert)
Attendre 2 secondes.
Sinon
Positionner le servomoteur à 0° (position du couvercle fermé)
[](https://innovation.iha.unistra.fr/uploads/images/gallery/2026-02/50Zimage.png)
- Empêcher le servomoteur de bouger inutilement si le couvercle est déjà ouvert.
- Modifier l’angle d’ouverture (ex : 90° au lieu de 0°).
- Ajouter un délai avant la fermeture automatique.
- expliquer le rôle du servomoteur,
- décrire la logique complète de la poubelle automatique,
- modifier seul les paramètres (distance, angle, temps).
---
- comment **un capteur déclenche une action**,
- comment structurer un programme Arduino,
- comment automatiser un objet du quotidien.
##### **Correction du code :**
Voici la correction du code :
[](https://innovation.iha.unistra.fr/uploads/images/gallery/2026-02/hxximage.png)
Ce programme met en œuvre un **système d’ouverture automatique de couvercle** basé sur la détection de proximité, typiquement utilisé pour une **poubelle robotisée sans contact** dans un club de robotique.
##### **Principe général**
Le code associe :
- un **capteur à ultrasons HC-SR04** pour mesurer la distance entre la poubelle et un obstacle (main, déchet, objet),
- un **servomoteur SG90 (180°)** pour actionner mécaniquement le couvercle.
L’objectif est d’ouvrir le couvercle lorsqu’un utilisateur s’approche, puis de le refermer automatiquement.
##### **Déroulement du programme**
1. **Initialisation au démarrage**
- L’Arduino configure le capteur HC-SR04 avec :
- broche **Trig = 4**
- broche **Echo = 5**
- Le servomoteur est connecté à la **broche 9**.
2. **Boucle de fonctionnement continu**
- Le capteur ultrason mesure en permanence la **distance en centimètres** devant la poubelle.
- Cette distance est envoyée sur le **port série**, ce qui permet :
- le débogage,
- la visualisation du comportement du système,
- l’analyse pédagogique avec les membres du club.
3. **Logique de décision**
- **Si la distance mesurée est inférieure à 5 cm** :
- le servomoteur est positionné à **0°** → **ouverture du couvercle**,
- une temporisation de **2 secondes** permet à l’utilisateur de jeter le déchet.
- **Sinon** :
- le servomoteur est positionné à **180°** → **fermeture du couvercle**.
| [](https://innovation.iha.unistra.fr/uploads/images/gallery/2024-04/p8uimage.png)
| [](https://innovation.iha.unistra.fr/uploads/images/gallery/2024-04/nJximage.png)
|
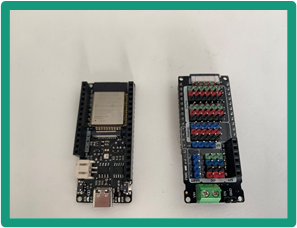
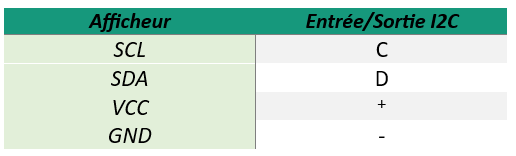
| L'**ESP32** (et son extension) est une carte microcontrôleur très performante qui permet de créer des projets électroniques connectés. Grâce à ses nombreux ports, tu peux y connecter des capteurs, des moteurs, ou d'autres composants pour réaliser des gadgets intelligents, des systèmes de domotique, ou des robots.
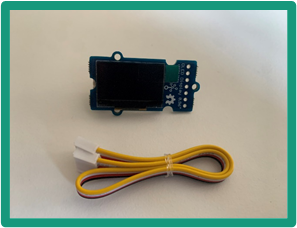
| Un **afficheur** est un écran qui permet de montrer des informations ou des données provenant du microcontrôleur. On peut l'utiliser pour afficher des textes, des chiffres... C'est très utile pour voir ce que fait le microcontrôleur en temps réel, comme la température d'une pièce, le score d'un jeu, ou l'état d'un système.
|
| [](https://innovation.iha.unistra.fr/uploads/images/gallery/2024-04/SKRimage.png)
| [](https://innovation.iha.unistra.fr/uploads/images/gallery/2024-04/ou0image.png)
|
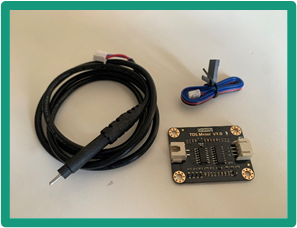
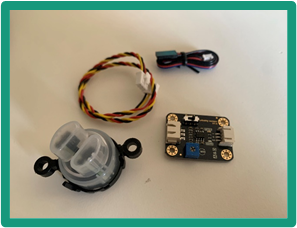
| Un **conductimètre** est un instrument qui mesure la capacité de l'eau à conduire l'électricité, ce qui nous informe sur la quantité de sels ou d'autres substances dissoutes dans l'eau. Plus l'eau contient de substances dissoutes, mieux elle conduit l'électricité. Cette mesure est très utile pour vérifier la pureté de l'eau.
| Un **turbidimètre**, permet de mesurer la turbidité, qui sert à évaluer la clarté de l'eau en détectant combien de petites particules sont suspendues dans celle-ci. Plus l'eau contient de particules comme de la terre, des micro-organismes, ou des substances chimiques, plus elle apparaît trouble.
|
| [](https://innovation.iha.unistra.fr/uploads/images/gallery/2024-04/Cdfimage.png)
| [](https://innovation.iha.unistra.fr/uploads/images/gallery/2024-04/sFSimage.png)
|
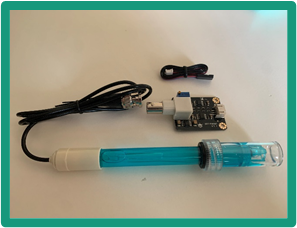
| Un **pH-mètre** est un instrument utilisé pour mesurer l'acidité ou la basicité d'une solution. Il donne une valeur appelée "pH", qui varie généralement de 0 à 14. Un pH de 7 est neutre, des valeurs inférieures à 7 indiquent une acidité, et des valeurs supérieures à 7 révèlent une basicité. Le pH-mètre est essentiel, car il aide à comprendre l'équilibre chimique des solutions.
| Un **thermomètre** est un instrument qui permet de mesurer la température de l'eau. En mesurant la température, on peut s'assurer que l'eau est dans les conditions optimales, que ce soit pour assurer la santé des organismes aquatiques, garantir la sécurité des baigneurs, ou maintenir l'efficacité des processus industriels.
|
| [ 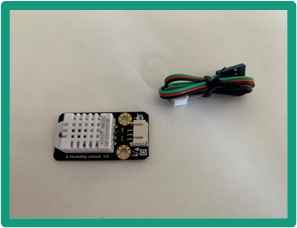](https://innovation.iha.unistra.fr/uploads/images/gallery/2024-04/8T3image.png)
| Le **DHT22** est un capteur qui mesure à la fois la **température et l'humidité de l'air** ambiant. Il fournit des informations précieuses pour contrôler les conditions environnementales. En mesurant l'humidité, le DHT22 aide à surveiller la quantité de vapeur d'eau dans l'air, ce qui est crucial pour maintenir une bonne qualité de l'air. Pour la température, il assure que les conditions soient confortables et sûres. |
Avec ces informations vous êtes prêts à assembler votre station.
##### **Étape 1 : Aller chercher les composants auprès de l'animateur**
- Un afficheur, avec des câbles femelle-femelle de toutes les couleurs.
- Un conductimètre avec sa carte d’interface, ainsi qu’un câble correspondant.
- Un turbidimètre, avec sa carte d’interface, ainsi qu’un câble correspondant.
- Un pH-mètre, avec sa carte d’interface, ainsi qu’un câble correspondant.
- Un thermomètre, avec sa carte d’interface, ainsi qu’un câble correspondant.
- Un DHT22, avec sa carte d’interface, ainsi qu’un câble correspondant.Un ESP32 et son extension, ainsi qu’un câble USB/USB-C pour alimenter votre station à l’ordinateur.
##### **Étape 2 : Fixer les interfaces des capteurs à la station.**
Fixer avec des vis adaptées, les interfaces des capteurs dans la boite de la station comme indiqué ci-dessous.[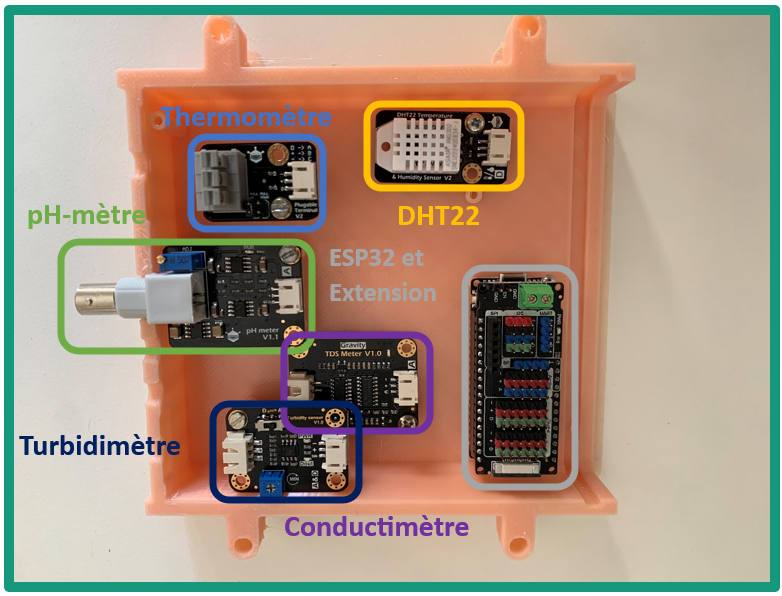](https://innovation.iha.unistra.fr/uploads/images/gallery/2024-04/p9Ximage.png)
##### **Étape 3 : Brancher l’afficheur et les capteurs à l’ESP32 via la carte d’extension présentée ci-dessous.**
Observer l’organisation de la carte d’extension et repérer les différents signaux.
[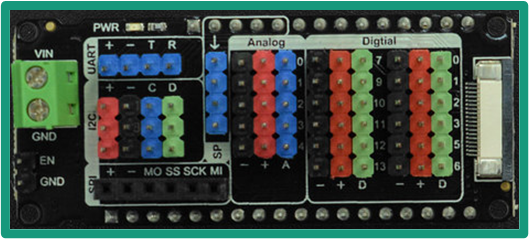](https://innovation.iha.unistra.fr/uploads/images/gallery/2024-04/VIBimage.png)
Connecter les capteurs et l'afficheur sur la carte d'extension DFR0762 selon les indications ci-dessous :
[](https://innovation.iha.unistra.fr/uploads/images/gallery/2024-04/IT8image.png)
| [](https://innovation.iha.unistra.fr/uploads/images/gallery/2024-04/hGKimage.png) | [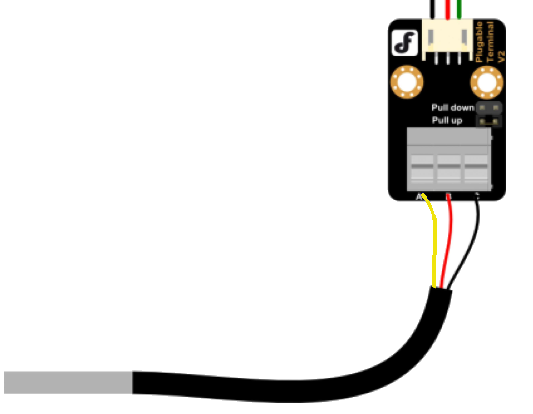](https://innovation.iha.unistra.fr/uploads/images/gallery/2024-04/73jimage.png)
|
| [](https://innovation.iha.unistra.fr/uploads/images/gallery/2024-04/mhPimage.png) | [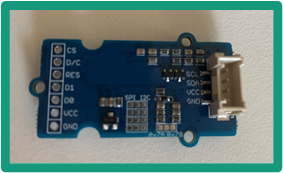](https://innovation.iha.unistra.fr/uploads/images/gallery/2024-04/f9Ximage.png) |
### **Jour 3 - Programmation Arduino**
##### **Mission :**
Aujourd’hui, votre objectif est de programmer la station AquaLife. Vous allez écrire, modifier et tester le code nécessaire pour contrôler les différents capteurs selon les instructions décrites ci-dessous. Bonne chance.
##### **Étape 1 : Lancement de l'IDE Arduino et configuration de l'application**
- Ouvrez l'application Arduino IDE [](https://innovation.iha.unistra.fr/uploads/images/gallery/2024-04/HQYimage.png)
- Charger le fichier : **2024\_stage\_collegiens\_v5.ino**
- Connectez votre station ESP32 à votre ordinateur via un câble USB-A/USB-C.
- Vérifiez le port de connexion de votre ESP32 (CH340K), en consultant le gestionnaire de périphériques de votre ordinateur pour identifier le port de communication (dans notre exemple ci-dessous : COM10).
[](https://innovation.iha.unistra.fr/uploads/images/gallery/2024-04/df3image.png)
- Sélectionnez ce port de communication dans l'environnement Arduino en utilisant le menu déroulant situé en haut à gauche, comme indiqué dans l'exemple (indiqué comme "Unknown COM10" dans cet exemple).
[](https://innovation.iha.unistra.fr/uploads/images/gallery/2024-04/2wkimage.png)
- Choisissez le modèle de carte approprié pour votre ESP32 dans les options de carte disponibles. Pour cet exemple, sélectionnez **"FireBeetle 2 ESP32-E"** (voir dans l’exemple ci-dessous).
[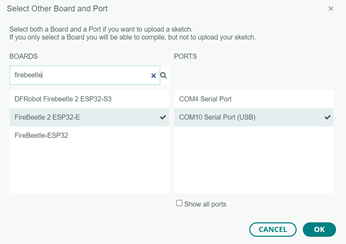](https://innovation.iha.unistra.fr/uploads/images/gallery/2024-04/tLgimage.png)
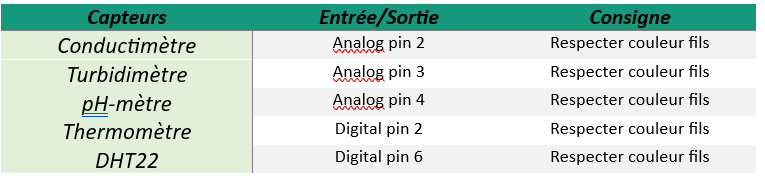
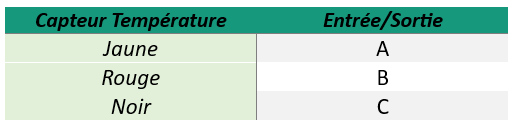
##### **Étape 2 : Assignation des pins des capteurs dans le code**
- Dans le code, de la **ligne 13 à 17**, remplacez les marqueurs **"Ax"** et **"Dx"** par les numéros de pin correspondants à votre câblage sur la carte d'extension de l'ESP32. Par exemple, si le pin analogique pour le capteur de TDS est 9, remplacez **"TDS\_Sensor\_Pin\_Num Ax"** par **"TDS\_Sensor\_Pin\_Num A9"**.
[](https://innovation.iha.unistra.fr/uploads/images/gallery/2024-04/i3timage.png)
##### **Étape 3 : Compiler et charger le code dans l’ESP32**
[](https://innovation.iha.unistra.fr/uploads/images/gallery/2024-04/dWximage.png)
- Un message d’erreur apparaît, notez les numéros des lignes de code mentionnés.
[](https://innovation.iha.unistra.fr/uploads/images/gallery/2024-04/7sHimage.png)
- Remplacez les chaînes de caractères **"xxxxx"**, **"yyyyy"** et **"zzzzz"** mentionnées dans les lignes d'erreur par l'identifiant du capteur spécifié. Ces identifiants, comme **"TDS\_Sensor\_Pin\_Num"** pour le turbidimètre, sont indiqués en orange dans les **lignes de code de 13 à 17**.
- Assurez-vous que le capteur concerné par l'erreur est correctement décrit dans une fonction dont le nom est en adéquation avec ce capteur, située dans les lignes précédant l’erreur.
- Recompilez le code pour vérifier que les erreurs ont été corrigées.
Une fois le code compilé sans erreurs, chargez-le dans l'ESP32 en cliquant de nouveau sur le bouton encadré en rouge.
##### [](https://innovation.iha.unistra.fr/uploads/images/gallery/2024-04/7Kcimage.png)
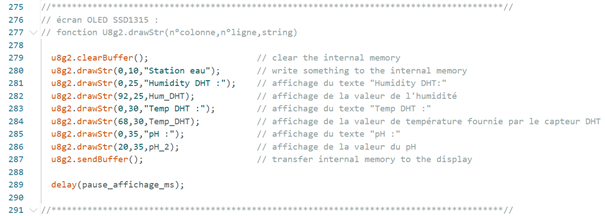
##### **Étape 4 : Correction de l'affichage pour une lecture claire des informations des capteurs**
- Modifiez la durée de pause entre chaque séquence d'affichage, qui se trouve à la **ligne 11**. Changez la valeur actuelle de 0,1 seconde à 2 secondes. Notez que cette valeur doit être saisie en millisecondes dans le code.
- Le code pour la première séquence d'affichage est situé entre les **lignes 275 et 291**. Vous remarquerez que les lignes de texte se superposent, rendant difficile la lecture des informations.
- Corrigez ce problème en ajustant le deuxième paramètre (x) dans la fonction d'affichage **u8g2.drawStr(x, y, "texte");** pour bien séparer les informations relatives aux capteurs "Humidity DHT", "Temp DHT", et "pH" sur l'afficheur.
[](https://innovation.iha.unistra.fr/uploads/images/gallery/2024-04/obximage.png)
##### **Étape 5 : Activation d’un message d’alerte sur l’afficheur**
- Identifiez dans le code les **lignes 309 à 328** qui permettront d'afficher un message d'alerte en lien avec le capteur de turbidité.
- Actuellement, ces lignes sont en commentaire et ne sont pas prises en compte lors de la compilation. Pour les activer, supprimez les marqueurs de commentaire **/\*** et **\*/** qui se trouvent respectivement aux **lignes 315 et 328**.
- Relevez la valeur de turbidité affichée sur votre appareil et définissez un seuil inférieur à cette valeur. Modifiez la valeur dans la déclaration (**float seuil = x;**) pour y placer votre seuil (supérieur à 0 et inférieur à votre valeur d’affichage).
- Compilez et téléchargez à nouveau le programme dans votre ESP32.
- Testez le fonctionnement du message d’alerte en plaçant une feuille de papier devant le turbidimètre pour simuler une turbidité élevée.
### **Jour 4 - Tests**
##### **Mission :**
Aujourd’hui, votre objectif est de tester les différents échantillons d’eau qui nous sont parvenu de trois pays différents avec votre station AquaLife. Vous avez un échantillon d’un cours d’eau de l’**A**ustralie (noté **A**), la **B**résil (noté **B**), le **C**anada (noté **C**) et un cours d’eau en Alsace qui sera le Témoin (noté **T**), faites les analyses et compléter le tableau proposé dans le document.
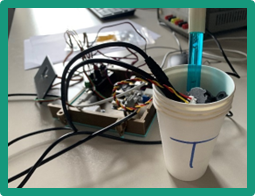
##### **Étape 1 : Collecte et préparation des échantillons d’eau**
- Notez et remplissez à moitié quatre gobelets avec des échantillons d'eau provenant de différents pays : **A**ustralie (noté **A**), **B**résil (noté **B**), **C**anada (noté **C**) et le cours d’eau en Alsace qui servira de **T**émoin (noté **T**).
- Avant de verser l'eau dans les gobelets, agitez bien les bouteilles pour homogénéiser les échantillons.
- Utilisez un cinquième gobelet pour rincer vos capteurs après chaque analyse. Remplissez ce gobelet avec de l'eau du robinet. Assurez-vous de changer l'eau de rinçage dans ce gobelet entre chaque type d’eau analysé (A, B, C, et T).
[](https://innovation.iha.unistra.fr/uploads/images/gallery/2024-05/ZRbimage.png)
##### **Étape 2 : Analyses physique des échantillons d’eau A, B, C et T**
- Pour analyser un échantillon, par exemple l'échantillon A, plongez les capteurs dans le gobelet correspondant. Homogénéisez la solution en remuant doucement le gobelet ou en déplaçant lentement les capteurs dans l'eau.
- Notez les résultats de l'analyse dans le tableau prévu à cet effet (Voir 4ème partie : Compléter le tableau avec vos analyses).
- Après chaque analyse, rincez les capteurs dans le gobelet de rinçage. Répétez la mesure jusqu'à obtenir trois résultats pour chaque capteur et pour chaque échantillon. Ce processus, appelé "tripliquas", est expliqué plus en détail un peu plus loin.
- Pensez à changer l'eau du gobelet de rinçage entre chaque type d’eau analysé (A, B, C et T).
[](https://innovation.iha.unistra.fr/uploads/images/gallery/2024-05/LaBimage.png)
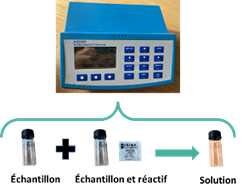
##### **Étape 3 : Analyses chimiques des échantillons d’eau A, B, C et T**
- Réalisez l’analyse chimique du Nitrate, à l’aide du photomètre. C'est un appareil qui permet de mesurer la concentration en polluants. Celui-ci mesure la différence entre l’échantillon et la solution (Echantillon avec le réactif), grâce au changement de couleur.
- Pour cela, suivez le protocole illustré dans le schéma ci-dessous.
- Notez les résultats de l'analyse dans le tableau prévu à cet effet un peu plus loin.
[](https://innovation.iha.unistra.fr/uploads/images/gallery/2024-05/pmBimage.png)
**Protocole du Photomètre : **
1. Prélèvement : À l'aide d'une pipette jaugée, prélevez 10 ml de l’échantillon à analyser.
2. Transfert : Versez l’eau de la pipette jaugée dans une cuvette propre.
3. Calibration : Réalisez un étalonnage en faisant le blanc (zéro) pour ajuster le photomètre avant l'analyse proprement dite.
4. Ajout du réactif : Introduisez le réactif approprié dans l’échantillon.
5. Mélange : Agitez doucement la solution pour bien mélanger le réactif avec l'échantillon.
6. Mesure : Placez la cuvette dans le photomètre et lancez la mesure en appuyant sur le bouton "start".
[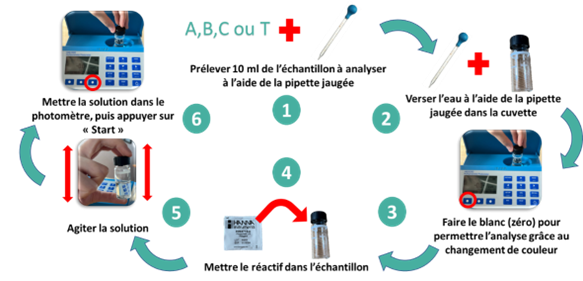](https://innovation.iha.unistra.fr/uploads/images/gallery/2024-05/Zt4image.png)
*Schéma d’utilisation du photomètre*
##### **Étape 4 : Compléter le tableau avec vos analyses**
| **Echantillon**
| **Témoin (T)**
| **Australie (A)**
| **Brésil (B)**
| **Canada (C)**
|
| **pH**
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| **Turbidité**
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| **Conductivité**
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| **Température**
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| **Nitrate**
|
|
|
|
|
*Tableau des analyses des échantillons des différents pays *
[](https://innovation.iha.unistra.fr/uploads/images/gallery/2024-05/meRimage.png)
**Les chercheurs font aussi des analyses en tripliquas, pourquoi ?**
Lorsqu'on réalise des analyses en tripliquas, cela signifie qu'on fait la même expérience trois fois. Cela peut sembler répétitif, mais c’est très important, surtout dans la recherche scientifique.
**Confirmer les résultats :** Imagine que tu essaies une nouvelle recette de cookies avec tes amis. Si tu ne fais qu'un seul cookie et qu'il est parfait, c'est génial, mais tu ne sais pas si c'est parce que tu as suivi la recette à la lettre ou si tu as juste eu de la chance. Si tu fais trois fournées de cookies et qu'elles sont toutes délicieuses, alors tu peux être sûr que la recette est bonne.
**Trouver les erreurs :** Parfois, une erreur peut se glisser dans une expérience. Si tu ne fais l'expérience qu'une seule fois et qu'il y a une erreur, tu ne le sauras jamais. Mais si tu fais l'expérience trois fois et que les résultats de l'une sont différents des autres, cela peut te signaler qu'il y a eu un problème quelque part. Cela aide à être plus précis.
**Moyenne des résultats :** Lorsqu’on fait une expérience plusieurs fois, on peut calculer la moyenne des résultats. Cela permet d'avoir une idée plus claire de ce qui se passe réellement. Par exemple, si un jour il fait 25°C, un autre 28°C et un autre 26°C, la température moyenne te donne une idée plus stable du temps qu'il fait réellement.
**En faisant des analyses en tripliquas, les scientifiques s’assurent que leurs découvertes sont solides et fiables. C’est comme vérifier ton travail en mathématiques ; plus tu vérifies, plus tu es sûr de ton résultat !**
### **Jour 5 - Analyse et Présentation**
##### **Mission :**
Aujourd’hui, votre objectif est de traiter les données des différents échantillons prélevés dans les cours d’eau de l’**A**ustralie (noté **A**), la **B**résil (noté **B**), le **C**anada (noté **C**) et le **T**émoin Alsace (noté **T**). Pour cela, vous devez traiter vos données à l’aide d’un fichier Excel, interpréter vos résultats pour apporter vos conclusions et enfin compléter un PowerPoint pour présenter vos résultats.
##### **Étape 1 : Traitement des données à l’aide d’un fichier Excel**
- Complétez le tableau Excel à votre disposition avec les données récoltées la veille par votre station AquaLife.
- Calculer la moyenne de vos tripliquas en utilisant la formule entre crochet \[=MOYENNE(Cellule1; Cellule2; Cellule3)\]
Rappel : une Cellule = Colonne + Ligne
Exemple : Cellule1 pour le premier échantillon de pH du Témoin est B2 qui contient la valeur 7,6 dans l’exemple. [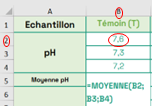](https://innovation.iha.unistra.fr/uploads/images/gallery/2024-05/ggJimage.png)
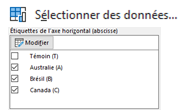
- Les graphiques pour le pH, la conductivité, la turbidité et la concentration en Nitrate apparaissent. Attention plusieurs erreurs se sont glissées à l’intérieur et il faut les corriger. Le graphique pour le pH est correct. Utilisez ce format comme modèle pour corriger les autres graphiques, en suivant les instructions ci-dessous : o Pour le graphique de la turbidité, il manque l’échantillon Témoin. Pour l’ajouter, faites un clic droit sur le graphique et allez dans "**Sélectionner les donnes…** " et cochez la case correspondant au Témoin (T).
[](https://innovation.iha.unistra.fr/uploads/images/gallery/2024-10/iknimage.png)
- **ATTENTION** si vous êtes sur open office cliquer sur le graphique jusqu'à ce que vous ayez ces 8 points verts, puis faites un clic droit.[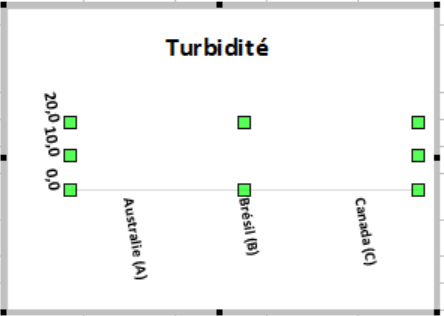](https://innovation.iha.unistra.fr/uploads/images/gallery/2024-10/bYXimage.png)
- Cliquez sur "plage de données" et remplacer chacun des deux "C" par un "B" .
[](https://innovation.iha.unistra.fr/uploads/images/gallery/2024-10/kI4image.png)
[](https://innovation.iha.unistra.fr/uploads/images/gallery/2024-10/Hocimage.png)
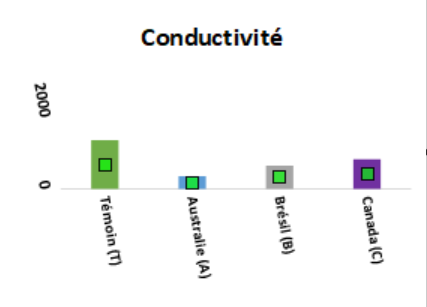
o Pour le graphique de la conductivité, il manque les étiquettes des valeurs de vos échantillons. Pour les ajouter, faites un clic gauche sur le graphique et allez dans "**Eléments de graphique**" en haut à droite du graphique pour cocher la case "**étiquette de données**" pour les ajouter.
[](https://innovation.iha.unistra.fr/uploads/images/gallery/2024-05/tuQimage.png)
- **ATTENTION** si vous êtes sur open office cliquer sur le graphique jusqu'à ce que vous ayez ces 4 points verts, puis faites un clic droit.
- [](https://innovation.iha.unistra.fr/uploads/images/gallery/2024-10/p7gimage.png)
- Cliquez sur "Insérer des étiquettes de données".
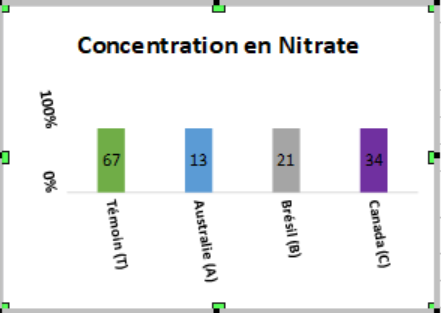
- o Le graphique de la concentration en Nitrates est au format pourcentage (%), ce qui ne permet pas de distinguer les différences entre les échantillons. Faites un clic droit sur le graphique pour aller dans "**Modifier le type de graphique**" et choisissez "**Histogramme groupé**".
[](https://innovation.iha.unistra.fr/uploads/images/gallery/2024-05/oGuimage.png)
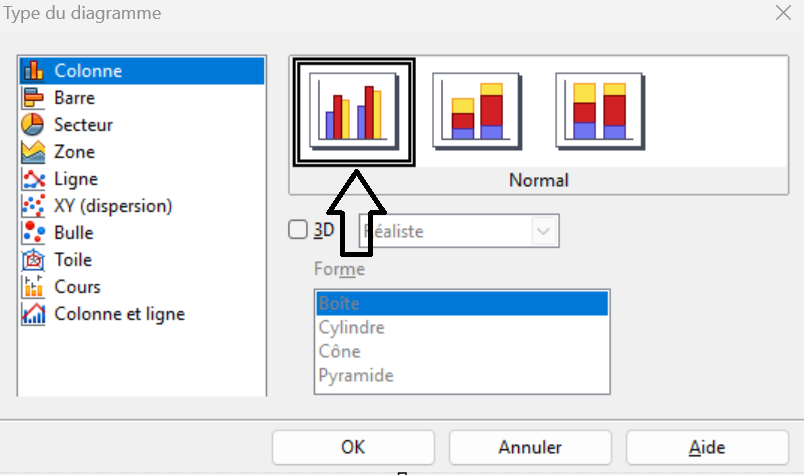
- **ATTENTION** si vous êtes sur open office cliquer sur le graphique jusqu'à ce que vous ayez ces 8 points verts, puis faites un clic droit.
- [](https://innovation.iha.unistra.fr/uploads/images/gallery/2024-10/XIKimage.png)
- Cliquez sur "Type de diagramme" et sélectionner le premier qui se nomme "Normal".
- [](https://innovation.iha.unistra.fr/uploads/images/gallery/2024-10/uquimage.png)
##### **Étape 2 : Interprétation et conclusion**
- Compléter le tableau ci-dessous, pour cela ajouter des **- / + /++ ** dans chaque ligne en fonction des informations présentées par la suite sur le pH, la turbidité, la conductivité et la concentration en nitrate de vos échantillons.
**Allez lire l’Exemple dans la section pH en bas de la page.**
- Faite le **Bilan** en comptant le nombre de + pour chaque échantillon. Celui qui en a le plus est probablement le cours d’eau le plus contaminé.
**Attention, il n’y a pas de bonnes ou mauvaises réponses, c’est à vous d’interpréter vos résultats !**
| **Echantillon**
| **Australie (A)**
| **Brésil (B)**
| **Canada (C)**
|
| **pH**
| ** **
| ** **
| ** **
|
| **Turbidité**
| ** **
| ** **
| ** **
|
| **Conductivité**
| ** **
| ** **
| ** **
|
| **Nitrate**
| ** **
| ** **
| ** **
|
| **Bilan**
| ** **
| ** **
| ** **
|
| | | Direct Chine (AliExpress, Alibaba) | CreaBot Robotique |
| Type | Désignation | Réf | Marque | Fournisseur | Prix TTC+port | LittleBot (creabot mobile) | RCcar (creabot car) |
| Carte Microcontrôleur | Arduino Nano ATmega328P | | | | | 1 | 1 |
| Development Shield | Sensor Shield R3 | | | | | 1 | 1 |
| Distance ultrason | Ultrason HC-SR04 | [HC-SR04 Ultraljudsmodul](https://www.amazon.fr/gp/product/B078S45WTG) | AZDelivery | Amazon | 1,85 € | 1 | 1 |
| Suivi ligne infrarouge | TRCT5000 coulée infrarouge | [MH-Sensor-Series](https://fr.aliexpress.com/item/1005006304693304.html) | DIY-Victor | AliExpress | 0,72 € | 1 | 1 |
| Accéléromètre | Gyroscope 6DDL MPU-6050 | [H-1-0122](https://www.amazon.fr/gp/product/B07XRK5FHP) | Hailege | Amazon | 4,13 € | | |
| Température et humidité | DHT11 JST PH | | | | | | |
| Température et humidité | DHT22 Dupont | [DHT22](https://fr.aliexpress.com/item/1005005545184001.html) | TZT | AliExpress | 1,65 € | | |
| Température et humidité | DHT22 JST PH | | | | | | |
| Moteur CC | Moteur CC encodeur | | | | | | 2 |
| Moteur CC | Moteur CC jaune | | | | | | |
| pilote moteur CC | double pont H L298N | [N30](https://www.amazon.fr/gp/product/B094FHW2TY) | xocom,ATOYT | AliExpress | 3,40 € | | |
| pilote moteur CC | double pont H L9110S | [L9110S](https://fr.aliexpress.com/item/1005006205377334.html) | PUMUDDSY | AliExpress | 0,95 € | 1 | 1 |
| Servomoteur vitesse | servomoteurs DM-S0090D-R 9g/0.08s/1.6kg.cm 22.9X12X22.5mm | [DM-S0090D-R](https://fr.aliexpress.com/item/32657260546.html) | DORCRCMAN | AliExpress | 2,22 € | 2 | |
| Servomoteur position | Servomoteur 180° SG90 9g | [SG90](https://fr.aliexpress.com/item/1005006379480535.html) | TowerPro | AliExpress | 2,19 € | | 1 |
| Moteur pas-à-pas | Nema 14 35x35x34mm arbre 24mm | [14HS13-0804S](https://www.aliexpress.com/item/32573904476.html) | STEPPERONLINE | AliExpress | 15,21 € | | |
| pilote moteur pas-à-pas | CNC shield V4 HW-702 v0.0.0 | [V4 DRV8825](https://www.aliexpress.com/item/1915894898.html) | RoarKit | AliExpress | 7,14 € | | |
| pilote moteur pas-à-pas | pilote moteur CC DRV8825 | [V4 DRV8825](https://www.aliexpress.com/item/1915894898.html) | RoarKit | AliExpress | | |
| Fonction
| Composant
| LittleBot
| K2024
| Référence
| Prix unitaire (€)
|
| Microcontrôleur
| Arduino Nano | 1 | 1
| https://www.lextronic.fr/carte-seeeduino-nano-102010268-59340.html | 10
|
| Carte de développement
| Sensor Shield Nano compatible UNO
| 1
| 1
| https://www.amazon.fr/Expansion-sensor-Shield-compatible-Arduino/dp/B072FCNF54 | 3
|
| Câble Alim + Prog
| USB C
| 1
| 1
| | 1
|
| Actionneur
| servomoteur à rotation 360° | 2
| 0
| [DM-S0090D-R 9g/0.08s/1.6kg.cm](https://fr.aliexpress.com/item/32657260546.html) | 2
|
|
| servomoteur à rotation 180° | 0
| 1
|
|
|
| Capteur
| module ultrason
| 1
| 0
| [HC-SR04](https://www.amazon.fr/gp/product/B078S45WTG/) | 1
|
|
| Capteur de ligne
| 0
| 1
|
|
|
# Installation des PC
### Dual-boot Windows Ubuntu
Pour le pilotage du bras robot SO-ARM100 et des drones, on privilégie Ubuntu et la programmation en Python.
Après avoir configuré correctement le PC Windows [https://doc.ubuntu-fr.org/cohabitation\_ubuntu\_windows](https://doc.ubuntu-fr.org/cohabitation_ubuntu_windows) :
- Configuration du Bios
- Désactivation de Secure Boot depuis Windows
Si Secure Boot n'est pas désactivé, le dual boot est possible mais il faudra booter sur Windows exclusivement depuis le Bios en appuyant sur F12. Si on démarre Windows via le Grub, secure boot demande une clé de sécu.
Installer Ubuntu LTS depuis une clé USB Live.
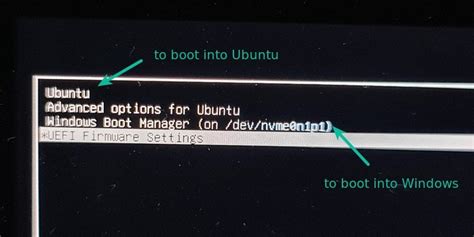
Après l'installation il y a deux possibilités pour basculer entre Windows et Ubuntu :
- Appuyer sur F12 dès le démarrage pour afficher le menu de Boot du Bios
- Sélectionner Windows ou Ubuntu
- Attendre que le menu Grub s'affiche
- Sélectionner Windows Boot Manager ou Ubuntu
[](https://innovation.iha.unistra.fr/uploads/images/gallery/2025-07/oip-2633633953.jpeg)
Il est possible de changer l'ordre de boot par défaut du menu Grub : [https://askubuntu.com/a/110738](https://askubuntu.com/a/110738)
# Mblock 5 pour l'animation STEM
# Création de blocs d'extensions aevc mBlock 5 Extension Builder
Voir [https://forum.makeblock.com/t/how-to-add-an-extension-for-mblock/2280](https://forum.makeblock.com/t/how-to-add-an-extension-for-mblock/2280)
Mblock est normalement installé dans `C:\ProgramData`
Sur mon PC il est installé dans `C:\Users\USER\mblock` (voir aussi dans `C:\Users\Public\Programs`
Les extensions sont installées dans : `C:\Users\USER\mblock\exts`
Les sources sont en JavaScript... Il faut trouver comment remonter aux sources C (fichiers .c et .h) qui appellent les librairies dont dépendent les blocs de programmation et définissent le code C équivalent à chaque bloc. A défaut, trouver si les fournisseurs de l'extensions ont mis le code source sur une forge logicielle publique.
### Création de nouveau bloc avec mBlock 5 Extension Builder
- Créer un compte sur [https://ext.mblock.cc/](https://ext.mblock.cc/)
- Une bonne documentation existe en Anglais : [https://www.yuque.com/makeblock-help-center-en/extension-builder](https://www.yuque.com/makeblock-help-center-en/extension-builder)
- Mais elle n'explique pas comment créer un bloc qui fait appel à une librairie externe non disponible dans mBlock. Voir prochain paragraphe -> Maintenant si : [https://www.yuque.com/makeblock-help-center-en/extension-builder/arduino-add-third-party-library](https://www.yuque.com/makeblock-help-center-en/extension-builder/arduino-add-third-party-library)
- Introduction Extension Builder et usage basique : [https://www.yuque.com/makeblock-help-center-en/extension-builder](https://www.yuque.com/makeblock-help-center-en/extension-builder)
- Comment ajouter un bloc qui fait appel à une librairie qui n'est pas dispo dans mBlock ? [https://support.makeblock.com/hc/en-us/articles/15264543414935-Example-Arduino-Add-a-Third-party-Library-for-an-Arduino-Extension](https://support.makeblock.com/hc/en-us/articles/15264543414935-Example-Arduino-Add-a-Third-party-Library-for-an-Arduino-Extension)