Année scolaire 2023-2024
Planning de l'année scolaire 2023-2024
Le planning se décompose en 3 cycles de 3 mois avec un robot par cycle. Les difficultés de chaque cycle est progressif.
1er cycle : Le contenu est entièrement donné, du schéma de câblage aux instructions de construction en passant par les programmes informatique du robot.
2ème cycle : Les participants doivent réfléchir comment créer la pièce, quelle forme est optimal, le programme est pré-construit et une aide leur est proposée.
3ème cycle : Seul le "type de robot" leur est donné, ils devront réfléchir à quelle esthétique lui donner, quels capteurs utiliser, comment l'assembler et comment le programmer.
Pour chaque cycle, les participants sont amenés à travailler sur 3 domaines :
- La conception mécanique et électronique.
- La fabrication mécanique et électronique
- La programmation (Scratch, Python, langage C...)
Les 3 domaines sont abordés en parallèle, afin d'introduire les notions et techniques progressivement et de manière didactique.
1er cycle : Little Bot
Le premier cycle sera consacré à la fabrication du robot appelé LittleBot.
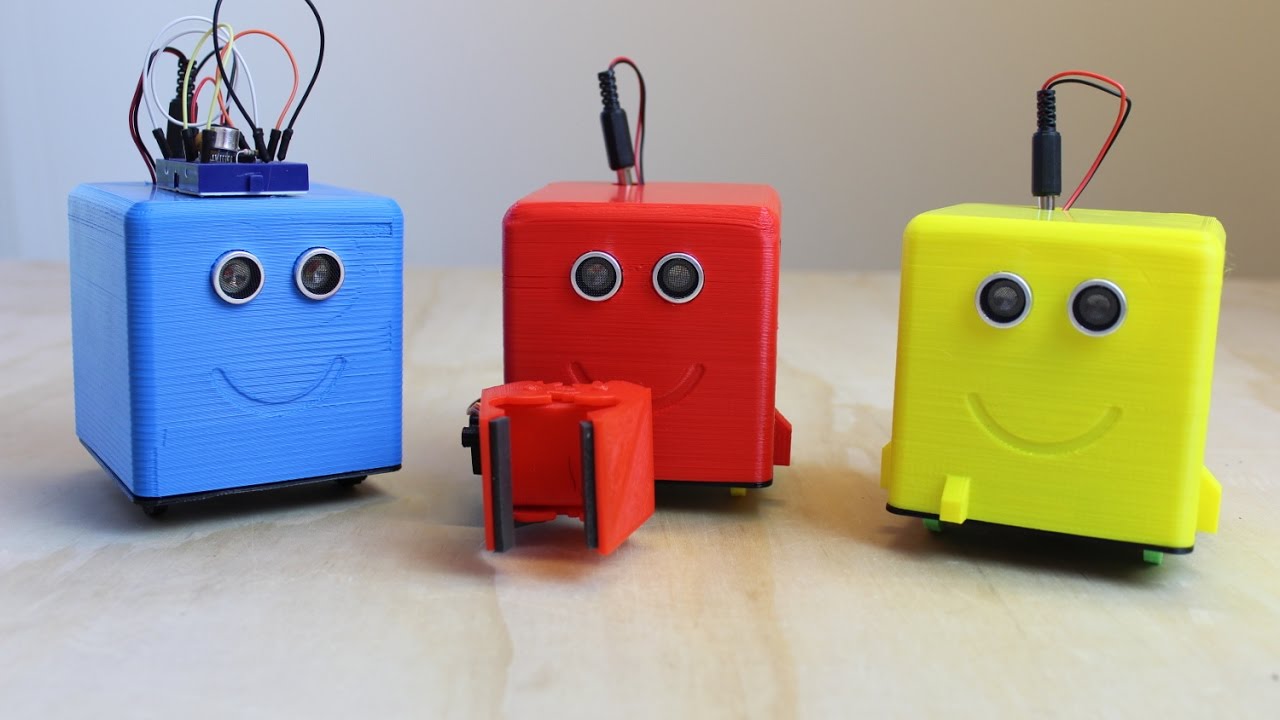
Pour ce cycle, nous utiliserons l'environnement Mblock de programmation informatique par bloc (Scratch) ainsi que le logiciel de dessin 3D assisté par ordinateur TinkerCAD (CAO).
Durant ce cycle, nous apprendrons à utiliser une imprimante 3D mais aussi des composants pour de l'électronique.
Nous découvrirons les principes et le fonctionnement du capteur ultrason ainsi que des servomoteurs.
Le programme, le câblage et l'assemblage est fourni pour la réalisation de ce projet.
L'objectif final de ce cycle est de faire avancer le robot, le faire tourner et de lui faire éviter des objets.
2ème cycle : Segway
Le deuxième cycle sera consacré à la fabrication d'un robot de type segway.
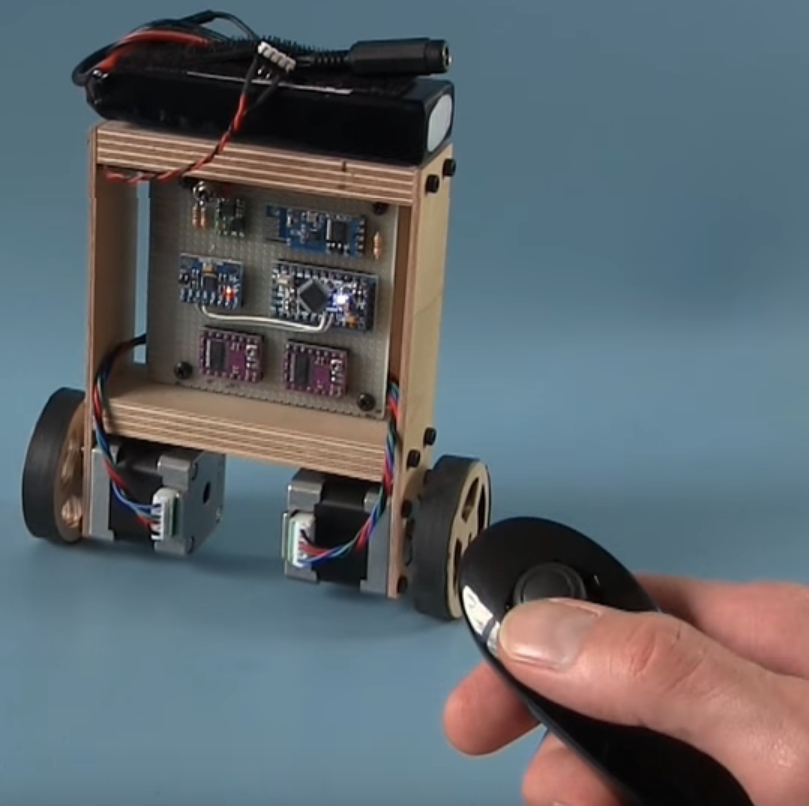
Pour ce robot, nous utiliserons le langage C++ (Arduino) pour le faire fonctionner ainsi que l'utilisation du logiciel Fusion360.
Durant ce cycle, nous apprendrons à utiliser plusieurs types de capteurs tel quel l'infrarouge et le gyroscopique.
Nous apprendrons comment fonctionne une télécommande et nous ferons fonctionner notre robot avec celle-ci.
Le programme, le câblage et l'assemblage vous sera donné partiellement pour ce projet.
L'objectif final de ce cycle est de comprendre la cinématique d'un "segway", garder une stabilité avec ce robot et faire avancer celui-ci.
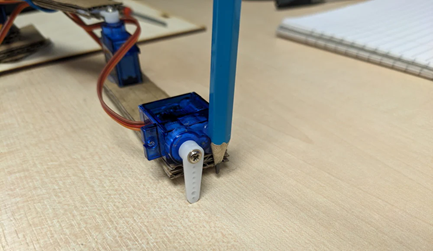
3ème cycle : Araignée ou Traceur de découpe
Le troisième cycle sera consacré à la fabrication d'un robot de type "araignée" et/ou type "traceur de découpe".

Pour ce robot, nous utiliserons le langage C++ (Arduino) pour le faire fonctionner ainsi que l'utilisation du logiciel Fusion360.
Durant ce cycle, nous utiliserons plusieurs servomoteur ainsi qu'un capteur ultrason, un haut parleur et un micro
L'objectif final de ce cycle est de comprendre la cinématique d'un robot à 4 pattes et ses déplacement ainsi que le déplacer en utilisant uniquement le son de notre voix.
En ce qui concerne le traceur, nous le coderons en C++ et nous utiliserons fusion 360 pour l'impression 3D.
Nous utiliserons des moteurs pas à pas ainsi que des servomoteurs pour le déplacement du crayon.
L'objectif est de construire un traceur de découpe permettant de dessiner avec une image vectoriel.
Le programme, le câblage et l'assemblage vous sera pas donné pour la réalisation de ce projet. Seul le type de robot vous sera donné, à vous de le contruire de A à Z.