# Description du projet
#### **Introduction :**
Pour ce cycle, nous allons réalisée une poubelle avec une ouverture de couvercle automatique.
[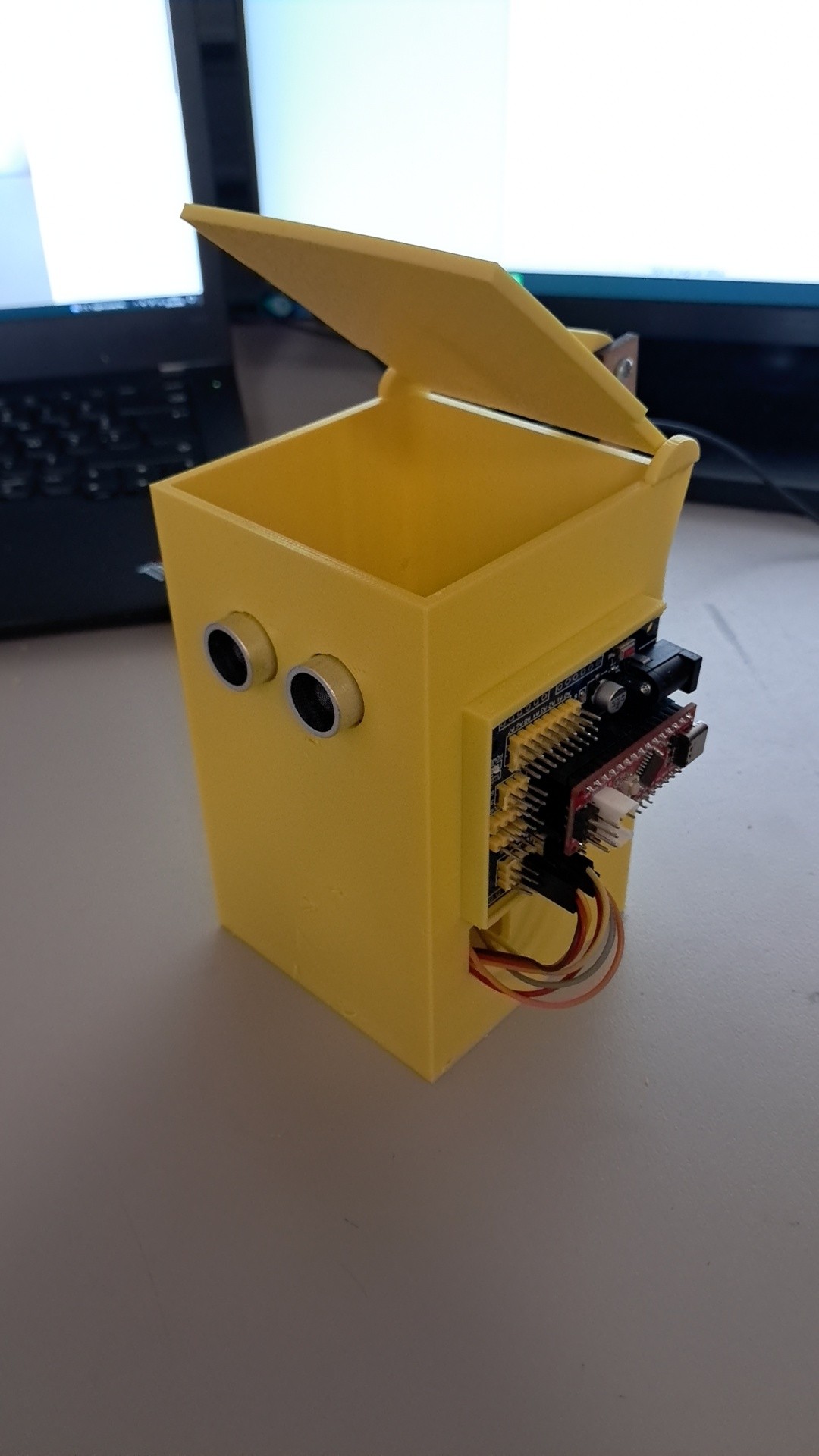](https://innovation.iha.unistra.fr/uploads/images/gallery/2026-02/snapchat-249294718.jpg)
#### **Description des compétences visées :**
**Compétences techniques et mécaniques :**
- Conception mécanique : savoir imaginer et concevoir le mécanisme d'ouverture automatique du couvercle
- Assemblage de composants : apprendre à manipuler et assembler les différentes parties (couvercle, axe, moteur, composants électroniques, etc.)
- Choix des matériaux : identifier les matériaux adaptés au projet
**Compétences en électronique :**
- Découverte et câblage de capteurs pour détecter une présence.
- Découverte et câblage de servomoteur pour l'ouverture/fermeture du couvercle.
- Savoir réaliser un schéma de câblage et connecter les composants sur une carte Arduino.
**Compétences en programmation :**
- Programmation d'un microcontrôleur Arduino : écrire un code qui gère les capteurs, les délais, et l'action du moteur.
- Logique conditionnelle : comprendre comment programmer des conditions simples (si détection → ouvrir couvercle).
- Optimisation du fonctionnement : ajuster les temps de réponse, la durée d’ouverture, etc.
**Compétences transversales :**
- Gestion de projet : planifier les étapes de réalisation, répartir les tâches, respecter les délais.
- Résolution de problèmes : savoir réagir face aux imprévus techniques ou fonctionnels.
- Travail en équipe.
#### **Description du programme des séances :**
**~6 séances :**
- ~Introduction du projet (brainstorming)
- ~1 séances sur TinkerCAD et sur l'impression 3D
- ~1 séance sur inkscape et sur la découpe laser
- ~1 séance Actionneur : servomoteur RC 180°(déplacement)
- ~1 séance Capteur : ultrason (distance)
- ~1 séance Assemblage et programmation
#### **Matériel :**
- 1 x Arduino Nano ou compatible ([seeeduino](https://www.lextronic.fr/carte-seeeduino-nano-102010268-59340.html), funduino,...) : ~10€
- 1 x câble USB C : ~1€
- 1 x [Sensor Shield](https://www.amazon.fr/Expansion-sensor-Shield-compatible-Arduino/dp/B072FCNF54/ref=sr_1_5?__mk_fr_FR=%C3%85M%C3%85%C5%BD%C3%95%C3%91&crid=EYZL0IOYS08U&keywords=expansion+arduino+nano&qid=1687874510&sprefix=epansion+arduino+nano%2Caps%2C157&sr=8-5) pour Arduino Nano : ~3€
- 1 x servomoteur à rotation 180° ([Servomoteur 180° SG90 9g](https://fr.aliexpress.com/item/1005006379480535.html "Servomoteur 180° SG90 9g")) : ~2€
- 1 x Module ultrason ([HC-SR04](https://www.amazon.fr/gp/product/B078S45WTG/)) : ~2€
- Une imprimante 3D pour imprimer les pièces du projet (fichier disponible à la prochaine page)(~5€ de filament) :
Total de 23€ par poubelle
- Une découpe laser pour découper une pièce du projet