Phase 2 - Approfondissement des fonctionnalités du Codey Rocky
Objectif général :
L'objectif de cette activité est d'initier les élèves à la robotique et à la programmation à travers l’utilisation du robot Codey Rocky et du logiciel mBlock. Ils apprendront à concevoir des algorithmes pour programmer le robot et effectuer différentes missions. À travers deux parcours progressifs, ils développeront des compétences en logique, en résolution de problèmes et en collaboration.
Compétences techniques :
-
Programmation visuelle avec mBlock : Les élèves apprendront à utiliser l'interface de blocs pour créer des programmes simples, incluant des boucles de répétition et l’utilisation des capteurs du robot.
-
Manipulation du robot Codey Rocky : Savoir piloter le robot en utilisant ses moteurs pour réaliser des tâches spécifiques comme se déplacer, détecter des obstacles ou effectuer des boucles de mouvement.
-
Débogage : Les élèves seront amenés à tester leurs programmes et corriger les erreurs rencontrées. Cette compétence est essentielle pour améliorer leur compréhension de la logique algorithmique et de la robotique.
-
Algorithmes et logique : Les élèves devront structurer leurs programmes de manière optimale en intégrant des boucles de répétition ou en répondant à des conditions basées sur les capteurs.
Savoir-être :
-
Persévérance : Les élèves devront faire preuve de persévérance pour tester, corriger et améliorer leurs programmes. Ils apprendront que les échecs font partie du processus d'apprentissage.
-
Collaboration : Travailler en binômes ou en groupe pour résoudre les problèmes ensemble, partager des idées et collaborer pour trouver des solutions.
-
Patience : Apprendre à prendre le temps d’analyser les résultats, ajuster les paramètres et modifier les programmes en conséquence.
-
Créativité : Les élèves auront l’opportunité d’utiliser leurs idées pour résoudre les défis proposés de manière personnelle et originale.
Compétences transversales :
-
Résolution de problèmes : Chaque parcours présente des défis spécifiques. Les élèves devront analyser les problèmes rencontrés et ajuster leur programme pour les résoudre de manière autonome ou en groupe.
-
Pensée logique et algorithmique : Organiser des instructions dans un ordre cohérent et adapté aux objectifs fixés, notamment en utilisant des boucles de répétition et des conditions liées aux capteurs.
-
Gestion du temps et organisation : Les élèves devront gérer leur temps pour tester, ajuster et valider leurs programmes tout en respectant les délais de l’activité.
-
Autonomie et prise d'initiative : Bien que le travail collaboratif soit encouragé, les élèves devront également faire preuve d’autonomie pour trouver des solutions et tester leurs propres idées de programmation.
Déroulement des parcours
Les élèves réaliseront deux parcours en utilisant le robot Codey Rocky. Pour chaque parcours, ils devront suivre des étapes précises de programmation à l’aide du logiciel mBlock, puis ajuster leur code en fonction des résultats observés.
Parcours 1 : Utilisation d’une boucle de répétition
-
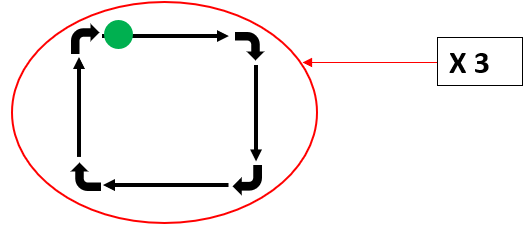
Présentation du défi : Expliquer aux élèves le but du premier parcours, qui consiste à programmer Codey Rocky pour effectuer un trajet spécifique en boucle, ici une boucle répétitives de 3.
-
Objectif du parcours : Utiliser une boucle de répétition pour faire en sorte que le robot répète une séquence de mouvements de manière continue. Le nombre de blocs maximum dans ce programme est de 5.
-
Étapes de la programmation :
- Créer une séquence de base pour faire avancer le robot et tourner à différents points.
- Intégrer une boucle de répétition pour que le robot répète cette séquence plusieurs fois.
-
Test et ajustements : Laisser les élèves tester leur programme et ajuster les paramètres si nécessaire pour garantir que le robot complète le parcours sans erreur.
-
Discussion de groupe : Échanger sur les difficultés rencontrées et les solutions trouvées. Comparer les différentes manières dont les élèves ont utilisé les boucles pour optimiser leurs programmes.*
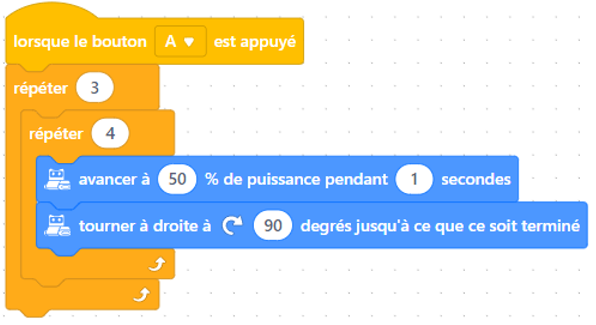
- Correction :

Parcours 2 : Utilisation du capteur de détection d’obstacles
-
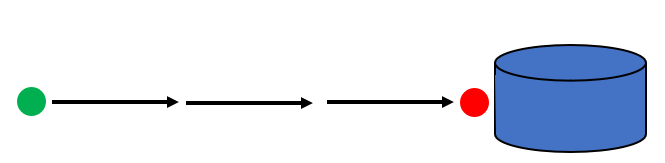
Présentation du défi : Expliquer aux élèves que le second parcours consiste à programmer le robot pour se déplacer en détectant et en évitant des obstacles grâce à son capteur de distance.
-
Objectif du parcours : Utiliser le capteur de détection d’obstacles pour permettre à Codey Rocky de réagir à son environnement en modifiant son comportement lorsqu’il rencontre un obstacle.
-
Étapes de la programmation :
- Créer une séquence de base pour faire avancer le robot.
- Intégrer le capteur de distance pour détecter les obstacles et faire en sorte que le robot s’arrête lorsqu’il en rencontre un.
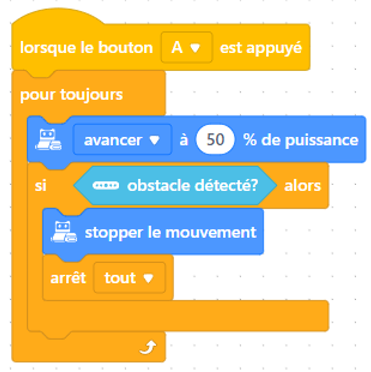
- Utiliser des blocs de conditions (« si... alors... ») pour que le robot prenne des décisions en fonction de ce qu’il détecte.
-
Test et ajustements : Permettre aux élèves de tester leur programme sur un parcours avec des obstacles. Ils devront observer comment le robot réagit et ajuster les conditions et distances de détection si nécessaire.
-
Bilan collectif : Faire un retour en groupe sur les difficultés rencontrées, notamment sur l’utilisation des capteurs, et discuter des solutions trouvées pour que le robot puisse naviguer correctement dans un environnement rempli d’obstacles.
- Correction :

Conclusion et retour d’expérience
À la fin de l'activité, chaque groupe partagera son expérience avec la classe :
- Quelles difficultés ont-ils rencontrées ?
- Quelles solutions ont été mises en place ?
- Quelles compétences ont-ils développées (persévérance, logique, collaboration) ?