Phase 3 - Suivi de ligne avec Codey
Objectif général :
Dans cette phase, les élèves vont approfondir leurs compétences en programmation et robotique en apprenant à créer un suiveur de ligne avec le robot Codey Rocky. Ils vont programmer deux types de suivi de ligne : un suivi basique basé sur des conditions simples, et un suivi fluide, qui optimise les mouvements du robot pour un déplacement plus souple.
Compétences techniques :
-
Utilisation des capteurs de lumière : Les élèves apprendront à utiliser les capteurs de détection de couleur du robot pour différencier les surfaces noires et blanches.
-
Programmation conditionnelle : Ils utiliseront des blocs de conditions (« si... alors... ») pour réagir à la détection de couleurs et ajuster les mouvements du robot en conséquence.
-
Optimisation du mouvement : Pour le second parcours, les élèves découvriront comment améliorer la fluidité des déplacements du robot en ajustant la sensibilité des capteurs et la vitesse des roues.
-
Débogage et ajustement de paramètres : Les élèves devront tester, corriger et ajuster leurs programmes pour que le robot suive la ligne de manière efficace, qu’il s’agisse d’un suivi de ligne basique ou fluide.
Compétences transversales :
-
Résolution de problèmes : Les élèves devront ajuster leurs algorithmes et leur logique en fonction des résultats obtenus lors des tests.
-
Précision et ajustement des paramètres : Pour le parcours fluide, ils apprendront à affiner les réglages de vitesse et la sensibilité des capteurs pour obtenir un comportement plus naturel et efficace.
-
Gestion du temps : Organiser leur temps pour concevoir, tester, ajuster et valider leur programme dans les délais impartis.
-
Esprit d’équipe : Travailler en binôme ou en groupe pour résoudre les défis de suivi de ligne, partager des idées et améliorer les solutions ensemble.
Déroulement des parcours
Les élèves réaliseront deux parcours distincts avec des niveaux de difficulté croissants pour programmer Codey Rocky à suivre une ligne tracée au sol.
Parcours 1 : Suiveur de ligne basique
-
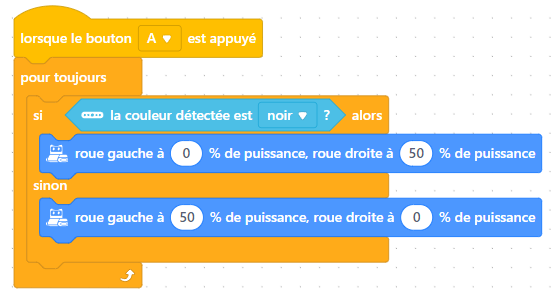
Présentation du défi : Le robot doit suivre une ligne en alternant les actions des roues en fonction de la couleur détectée (noir ou blanc).
-
Objectif du parcours :
- Si le capteur de gauche détecte la couleur noire, seule la roue gauche s'active pour tourner vers la droite.
- Si le capteur de droite détecte la couleur blanche, seule la roue droite s'active pour tourner vers la gauche.
-
Étapes de la programmation :
- Utiliser les blocs conditionnels pour définir les actions des roues selon la couleur détectée par les capteurs de Codey Rocky.
- Assigner les actions des roues en fonction de la couleur noire pour tourner à droite et de la couleur blanche pour tourner à gauche.
-
Test et ajustements :
- Laisser les élèves tester leur programme sur une piste simple avec une ligne noire sur fond blanc.
- Ils ajusteront les vitesses des roues et les conditions si le robot dévie ou ne suit pas correctement la ligne.
-
Discussion de groupe : Échanger sur les stratégies utilisées pour améliorer le suivi de la ligne et résoudre les problèmes de déviation ou de perte de la ligne.
- Correction :

Parcours 2 : Suivi de ligne fluide
-
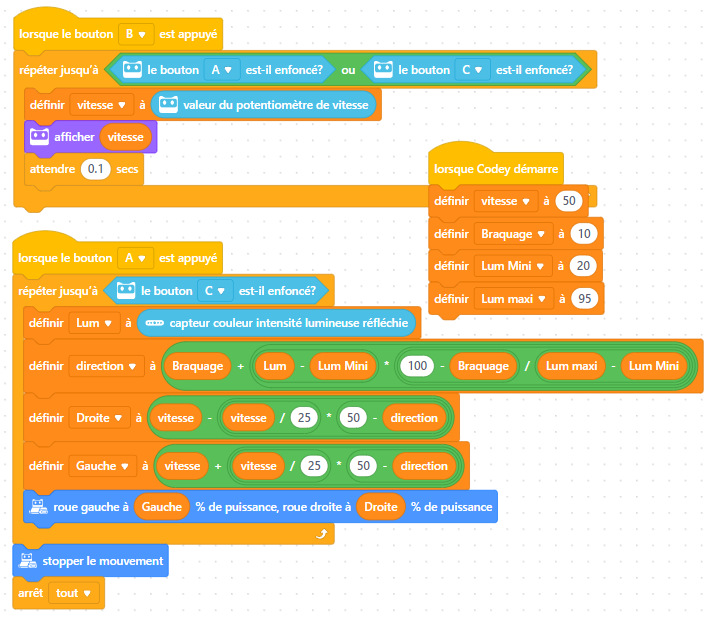
Présentation du défi : Cette fois-ci, les élèves doivent programmer le robot pour qu'il suive la ligne de manière plus fluide, avec des virages progressifs et sans arrêts brusques.
-
Objectif du parcours :
- Utiliser les capteurs pour ajuster progressivement la vitesse des roues, afin de maintenir le robot centré sur la ligne et éviter des mouvements saccadés.
- Utiliser les capteurs pour ajuster progressivement la vitesse des roues, afin de maintenir le robot centré sur la ligne et éviter des mouvements saccadés.
-
Étapes de la programmation :
- Utiliser les capteurs de lumière pour détecter la position du robot par rapport à la ligne.
- Ajuster la vitesse des roues de façon continue (par exemple, faire ralentir une roue au lieu de l'arrêter complètement).
- Éviter les changements de direction trop brusques en ajustant les conditions de manière plus douce et progressive.
-
Test et ajustements :
- Les élèves testeront le robot sur une piste avec des courbes plus complexes.
- Ils ajusteront la vitesse des roues en fonction des courbes et de la réactivité des capteurs pour rendre les mouvements plus fluides.
- Les élèves devront tester plusieurs configurations pour atteindre un suivi fluide.
-
Bilan collectif :
- Comparer les différences entre les deux méthodes de suivi (basique vs fluide).
- Discuter des réglages qui ont permis d'améliorer la fluidité du robot et de l'impact des ajustements sur la vitesse et la précision des mouvements.
- Correction :

Conclusion et retour d’expérience
À la fin de l’activité, chaque groupe pourra partager ses observations :
- Quelles étaient les principales différences entre le suivi de ligne basique et fluide ?
- Quels ajustements étaient nécessaires pour améliorer la précision et la fluidité ?
- Quelles compétences techniques et transversales ont été développées ?