# Programmation d'un servomoteur RC 360°
### **Objectif :**
Comprendre le fonctionnement des servomoteurs et apprendre à les programmer avec **mBlock** et **Arduino IDE**.
---
#### **1. Introduction aux Servomoteurs RC 360°**
##### Qu’est-ce qu’un servomoteur RC 360° ?
Un **servomoteur RC 360°** (ou « continu ») est un petit moteur qui **peut tourner en continu dans les deux sens** (comme une roue), contrairement aux servos classiques qui ne tournent que sur un angle limité (en général 180° maximum).
##### ⚙️ À quoi ça sert dans un robot comme le LittleBot ?
Dans le LittleBot, ces servos sont utilisés pour faire **tourner les roues** du robot. En envoyant des signaux différents, on peut :
- **Faire avancer** le robot (les deux roues tournent en avant),
- **Faire reculer** le robot (les deux roues tournent en arrière),
- **Faire tourner** (une roue avance, l’autre recule ou reste fixe).
#### **2. Configuration et Programmation avec mBlock**
##### Présentation des blocs spécifiques à la gestion des servomoteurs
Pour un servomoteur RC 360° on va utiliser le bloc ci-dessous que l'on peut trouver dans l'extensions "Servo360" ou ici "[servo.mext](https://innovation.iha.unistra.fr/attachments/54)" à télécharger et faire un glisser-déposer sur Mblock.
[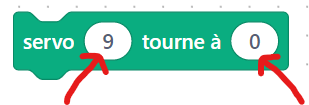](https://innovation.iha.unistra.fr/uploads/images/gallery/2025-04/Couimage.png)
Numéro de broche vitesse du servomoteur (dans un sens entre \[-100 et 0\[ et dans l'autre entre \]0 et 100\]). A 0 on est donc à l'arrêt
##### **Branchement d'un servomoteur à un Arduino Nano**
Un servomoteur possède **trois câbles** :
- **Noir ou Marron** → GND (Masse)
- **Rouge** → 5V (Alimentation)
- **Jaune ou Orange** → Signal (Entre les broches **2 et 13** du Nano)
- [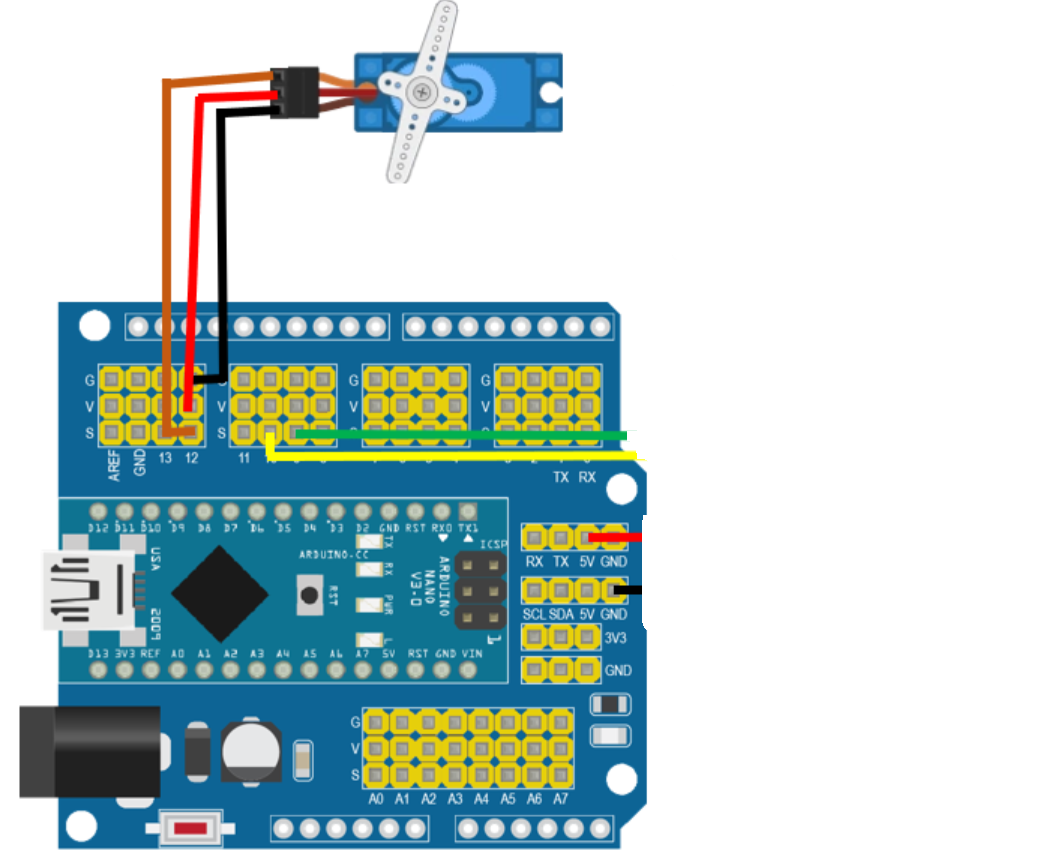](https://innovation.iha.unistra.fr/uploads/images/gallery/2025-03/capture-decran-2025-03-21-142828.png)
#### **Exercice sur Mblock**
**Consigne :** Programmer un **servomoteur RC 360°** pour qu'il effectue en boucle un changement de **sens de rotation** à **vitesse maximale** et cela toute les **2 secondes**.
### **3. Configuration et Programmation avec Arduino IDE**
#### **Exercice sur Arduino IDE**
**Consigne :** Programmer un **servomoteur 360** pour qu'il effectue en boucle un changement de **sens de rotation** à **vitesse maximale** et cela toute les **2 secondes**.
#### **Correction :**
```
#include
Servo monServo; // Création de l'objet Servo
void setup() {
monServo.attach(9); // Connexion du servomoteur sur la broche D9
}
void loop() {
monServo.writeMicroseconds(2000); // Vitesse maximale dans un sens
delay(2000); // Tourne pendant 2 secondes
monServo.writeMicroseconds(1000); // Vitesse maximale dans l'autre sens
delay(2000); // Tourne pendant 2 secondes
}
```
### **4. Discussion et Applications**
#### **Applications pratiques**
- 🤖 **Bras robotisé**
- 🗑️ **Poubelle connectée**
- 🤖 **Little Bot**
#### **Questions et suggestions d’amélioration**
✅ Ajouter un **potentiomètre** pour contrôler l’angle du servomoteur.
✅ Utiliser un **bouton poussoir** pour déclencher le mouvement.
✅ Remplacer le **servomoteur 180°** par un **servomoteur à rotation continue**.