0 - Robotique et physical AI
- IA robotique - Architectures pour l'apprentissage profond
- Banc de machine learning avec SO-ARM101
- Assembler un PC d'IA en 2026
- Installation de machine avec RT Kernel et accélération graphique
- Machine Learning LeRobot avec SO-ARM101
- Démo AICA YOLO Portes Ouvertes 2026
- Machine Learning LeRobot avec SO-ARM101 - Legacy
IA robotique - Architectures pour l'apprentissage profond
Le contrôle d'un robot pour une application donnée au moyen d'un modèle de réseaux de neurones nécessite de fournir une quantité importante de données d'apprentissage. Ces données doivent permettre de comprendre comment résoudre la tâche, par exemple pour une tâche de saisie et dépose d'un objet (Pick and Place) elles doivent donc comporter :
- Comment bouge le robot et chacun de ses moteurs
- Comment bouge la pince
- Où sont placés les objets au début "problème"
- Où sont placé les objets à la fin "solution"
L'approche la plus répandue pour générer ces données d'apprentissage est la démonstration : le robot est "téléguidé" par un opérateur. On enregistre la trajectoire des servomoteurs ainsi qu'une ou plusieurs vidéos filmant les objets et le robot.
Bancs matériel de Machine Learning
Open ARM et open arm mini
https://huggingface.co/spaces/lerobot/robot-folding
- Follower : Open ARM modified by LeRobot
- https://huggingface.co/datasets/lerobot/openarms-hardware-modifications

- Teleop : open-arms-mini
- https://github.com/pkooij/open-arms-mini
- 8× Feetech STS3215-C046 servo (7.4 V, 1:147)

Koch
Robotis OMX
https://ai.robotis.com/omx/introduction_omx.html
LeRobot SO-ARM10X

Aloha Solo
Base : $9,899.95
- WidowX Leader Arm ($4,949.95)
- ViperX Follower Arm ($7,149.95)
- 2x Intel RealSense D405 Cameras
- Portable Touchscreen Monitor
- Tripod, Cables, Accessories

https://www.youtube.com/watch?v=hFqZJZ666Cw

https://www.trossenrobotics.com/aloha-solo
Aloha Stationary
Without Laptop : $30,799.98

Environnement logiciel de collecte de données
Hugging Face LeRobot - Python
Visualisation des DataSet : https://huggingface.co/spaces/lerobot/visualize_dataset
On note qu'il y a beaucoup de tests avec le SO-ARM10X. Mais pas d'homogénéité dans la collecte de données : les caméras sont placées la plupart du temps devant le robot, parfois sur la pince, et quasiment jamais avec le setup recommandé.
Rechercher des DataSet qui ont servi à entrainer des modèles disponibles publiés :
- https://huggingface.co/models?pipeline_tag=robotics&sort=trending
- Dans le panneau de droite > Sélectionner le filtre Reinforcement Learning > Robotics
- Beaucoup de DataSets sont uploadés mais peu de modèles entrainés le sont
- Par exemple on recherche les travaux de Rémi Cadene
- Modèles : il y en a 4 https://huggingface.co/models?pipeline_tag=robotics&sort=trending&search=cadene
- DataSets : Il y en a beaucoup https://huggingface.co/datasets?task_categories=task_categories:robotics&sort=trending&search=cadene
- Les Modèles entrainés avec le SO-ARM10 concernent la manipulation de Lego, par exemple le plus récent :
- Modèle : https://huggingface.co/cadene/act_so100_5_lego_test_080000
- DataSet pour le training : https://huggingface.co/datasets/cadene/so100_5_lego_test
- DataSet pour l'évaluation du modèle : https://huggingface.co/datasets/cadene/eval_act_so100_5_lego_test_080000
Setup similaires à celui du SO-ARM10X simple :
- Robot Koch : /lerobot/koch_pick_place_1_lego
Télécharger un DataSet : https://github.com/huggingface/lerobot/blob/a1daeaf0c4ae345df9b2f5b862f091ce158e4446/examples/1_load_lerobot_dataset.py
Rejouer les épisodes d'un DataSet : https://github.com/huggingface/lerobot/blob/a1daeaf0c4ae345df9b2f5b862f091ce158e4446/examples/12_use_so101.md#replay-an-episode
Evaluer un modèle pré-entrainé : https://github.com/huggingface/lerobot/blob/a1daeaf0c4ae345df9b2f5b862f091ce158e4446/examples/2_evaluate_pretrained_policy.py
Trossen Robotics Interbotix - ROS, Python,
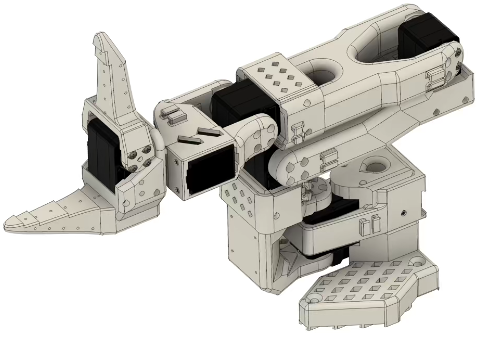
Banc de machine learning avec SO-ARM101
Assemblage et démarrage du SO-ARM101
Configurer les servomoteurs
La carte FE-URT-1 fournie par Feetech n'est pas détectée sous Ubuntu à cause d'un conflit avec un paquet de brail. On le désinstalle :
sudo apt-get autoremove brlttyhttps://askubuntu.com/questions/1321442/how-to-look-for-ch340-usb-drivers/1472246#1472246
https://github.com/huggingface/lerobot/blob/main/examples/10_use_so100.md#c-configure-the-motors
- Brancher la carte
- Trouver l'interface USB sur laquelle est branchée la carte
python lerobot/scripts/find_motors_bus_port.py
-
- Sous Linux, par ex.
/dev/ttyACM0ou/dev/ttyUSB0 - Sous Windows, par ex.
COM13ouCOM14
- Sous Linux, par ex.
- Sous Linux, Changer les droits sur les interfaces USB
sudo chmod 666 /dev/ttyACM0
sudo chmod 666 /dev/ttyACM1- Ouvrir Codium > File > Open Folder >
admin_ros/lerobot - Modifier le fichier de config
gedit ~/lerobot/lerobot/common/robot_devices/robots/configs.py
- Chercher la config du So100 en ligne 436
class So100RobotConfig(ManipulatorRobotConfig): - Remplacer
port="/dev/tty.usbmodem58760431091",pour leleader_arms(L446) et lefollower_arms(L463) par le port découvert - Brancher les servos un à un à la carte puis lancer le script d'initialisation, en incrémentant l'ID à chaque fois :
python lerobot/scripts/configure_motor.py \
--port /dev/tty.usbmodem58760432961 \
--brand feetech \
--model sts3215 \
--baudrate 1000000 \
--ID 1- Au fur et à mesure les brancher en série et/ou noter l'ID sur le moteur
- Les servos sont bougés à leur position centrale et l'offset mis à 0
Ne plus bouger les servos jusqu'à l'assemblage
Construction et assemblage mécanique
Une version 101 est sortie en 05/2025. Le Leader est plus simple à assembler, et plus besoin de démonter les servos pour enlever un engrenage et les rendre passifs. Il suffit d'acheter le kit de 6 servos avec 3 rapports de transmission différents :
- https://github.com/TheRobotStudio/SO-ARM100?tab=readme-ov-file#getting-your-own-so101
- https://www.alibaba.com/product-detail/6PCS-7-4V-STS3215-Servos-for_1601428584027.html?spm=a2747.product_manager.0.0.757c2c3clU7uH3
- Imprimer la mâchoire statique intégrant le support de caméra : https://github.com/TheRobotStudio/SO-ARM100/blob/main/Optional/Wrist_Cam_Mount_32x32_UVC_Module/README.md
- Suivre le guide d'assemblage pour le SO101 : https://huggingface.co/docs/lerobot/so101#step-by-step-assembly-instructions
- Pour le SO100 : https://huggingface.co/docs/lerobot/so100#step-by-step-assembly-instructions
Astuces pour l'assemblage
- Mettre une vis sur l'arbre moteur et l'axe passif (à l'opposée de l'arbre moteur) quand il y a la place d'en mettre une (vérifier qu'il y aura la place après assemblage des éléments autour du moteur)
- Ne plus bouger les servos après leur initialisation qui les met à l'angle 0. Dans l'idéal, assembler les éléments de manière à ce que le robot soit en configuration initiale avec tous les moteurs à 0
- En pratique, on monte le robot dans la configuration ci-dessous. C'est l'étape de calibration qui permettra de définir un offset pour que le zéro des moteurs corresponde au modèle cinématique du SO-ARM10X
- Il est possible d'ajouter un offset dans la configuration des servomoteurs, par exemple via les scripts du projet LeRobot
- Attention si vous démarrez le robot sous ROS avant d'avoir lancer la calibration LeRobot qui fixe l'Offset dans les servomoteurs, vous risquez de casser le robot
Banc de Machine Learning LeRobot
Agencement des caméras et robots
Le nombre, le positionnement et la qualité des caméras sont importants pour la qualité du DataSet :
- Plusieurs setup sont proposés :
- Caméras d'environnement : https://github.com/TheRobotStudio/SO-ARM100?tab=readme-ov-file#2-overhead-camera-mount
- Caméras de poignet : https://github.com/TheRobotStudio/SO-ARM100?tab=readme-ov-file#5-wristmount-cameras
- Attention au champ de vision des caméras si vous prenez une de vos webcams
- Il risque de ne pas être assez "fish eye"
- Par exemple, la WebCam Logitech C270 (720p) a un champ trop étroit pour être intégrée au module Overhead
Au FabLab de IUT Haguenau
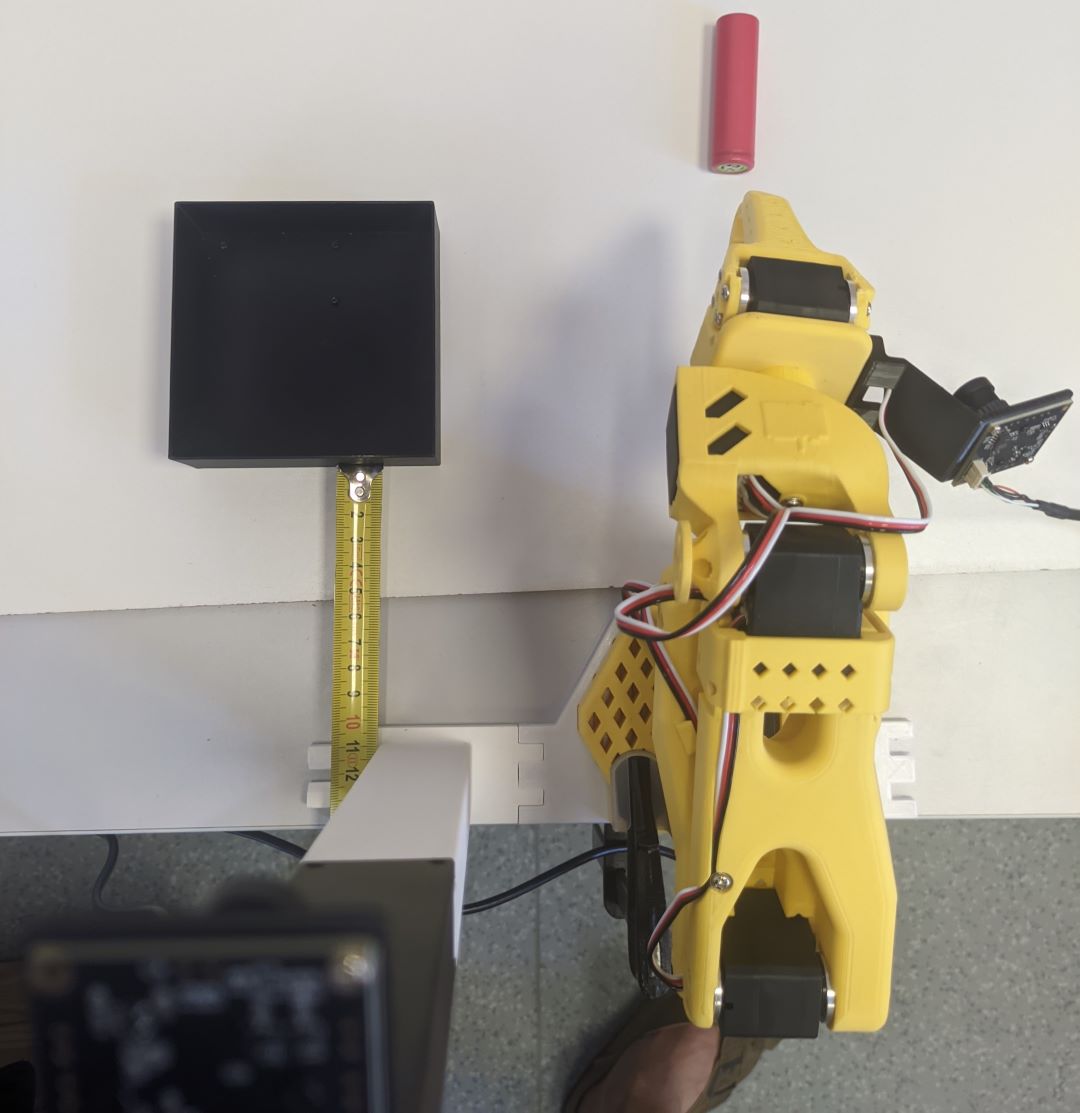
- On choisit de prendre deux caméras au format 32 x 32 , la version 1080p permet d'augmenter la qualité du DataSet
- Imprimer et assembler la mâchoire statique intégrant le support de caméra : https://github.com/TheRobotStudio/SO-ARM100/blob/main/Optional/Wrist_Cam_Mount_32x32_UVC_Module/README.md
- Imprimer et assembler le support de robot et de caméra Overhead : https://github.com/TheRobotStudio/SO-ARM100/blob/main/Optional/Overhead_Cam_Mount_32x32_UVC_Module/README.md
Calibration des caméras
https://huggingface.co/docs/lerobot/cameras
Assembler un PC d'IA en 2026
Usages :
- Serveur pour enseignement robotique et IA
- Pilotage de robots temps-réel avec ROS2
- Inférence de larges modèles d'IA, ex.
- Fine-tuning de modèles d'IA, ex. LeRobot
Configuration pour un total d'environ 1500€ :
- Carte graphique Nvidia RTX 5070 Ti 16GB (~900€)
- Processeur AMD AM5 Ryzen 7 7700 (~190€)
- Carte mère moyenne gamme (~150€) AMD AM5 PCIe 5.0 x16 b650/e https://pausehardware.com/comparatif-des-chipsets-amd-x870-x670-b650-ryzen/ https://www.cdiscount.com/mp-267-asu1705279946652.html https://www.pccomponentes.fr/carte-mere-gigabyte-b650e-eagle-amd-b650-socket-am5-ddr5-atx-wifi-6e-pcie-50-raid-rgb https://www.pccomponentes.fr/carte-mere-asus-tuf-gaming-b650e-plus-wifi-b650-am5-ddr5-atx-wifi-6e-pcie-50-raid
- 1 x PCIe 5.0 x16 @CPU
- 1 x PCIe 4.0 x16 (max. @x1) @PCH
- 3 x M2 (1 x PCIe 5.0 et 2 x PCIe 4.0)
- 1 x USB 20GBps
- 4 x ports SATA
- Wi-Fi 6E, Ethernet Realtek 2,5 Gbit
- 4 x DDR5
- 64GB DDR5 5600 MHz
- Alimentation 750-850W 80+ Gold
- Boîtier silencieux Antec P10C silent
5070 Ti
- Installer nvidia-driver >570 et linux-kernel >6.11
- Installer la version open du driver :
nvidia-driver-570-open
Donc par exemple :
export distro="ubuntu2404"
export arch="x86_64"
export version="570"
wget https://developer.download.nvidia.com/compute/cuda/repos/$distro/$arch/cuda-keyring_1.1-1_all.deb
sudo dpkg -i cuda-keyring_1.1-1_all.deb
sudo apt update
sudo apt install nvidia-driver-pinning-$version
sudo IGNORE_PREEMPT_RT_PRESENCE=1 apt install cuda-drivers nvidia-driver-$version-openBenchmark glmark2 en résolution 1920x1080 https://openbenchmarking.org/test/pts/glmark2
glmark2 -s 1920x1080
=======================================================
glmark2 2023.01
=======================================================
OpenGL Information
GL_VENDOR: NVIDIA Corporation
GL_RENDERER: NVIDIA GeForce RTX 5070 Ti/PCIe/SSE2
GL_VERSION: 4.6.0 NVIDIA 570.211.01
Surface Config: buf=32 r=8 g=8 b=8 a=8 depth=24 stencil=0 samples=0
Surface Size: 1920x1080 windowed
=======================================================
[build] use-vbo=false: FPS: 17118 FrameTime: 0.058 ms
[build] use-vbo=true: FPS: 29160 FrameTime: 0.034 ms
[texture] texture-filter=nearest: FPS: 24267 FrameTime: 0.041 ms
[texture] texture-filter=linear: FPS: 29185 FrameTime: 0.034 ms
[texture] texture-filter=mipmap: FPS: 29395 FrameTime: 0.034 ms
[shading] shading=gouraud: FPS: 28971 FrameTime: 0.035 ms
[shading] shading=blinn-phong-inf: FPS: 28964 FrameTime: 0.035 ms
[shading] shading=phong: FPS: 28750 FrameTime: 0.035 ms
[shading] shading=cel: FPS: 28703 FrameTime: 0.035 ms
[bump] bump-render=high-poly: FPS: 26538 FrameTime: 0.038 ms
[bump] bump-render=normals: FPS: 29854 FrameTime: 0.033 ms
[bump] bump-render=height: FPS: 29795 FrameTime: 0.034 ms
[effect2d] kernel=0,1,0;1,-4,1;0,1,0;: FPS: 25300 FrameTime: 0.040 ms
[effect2d] kernel=1,1,1,1,1;1,1,1,1,1;1,1,1,1,1;: FPS: 19425 FrameTime: 0.051 ms
[pulsar] light=false:quads=5:texture=false: FPS: 27432 FrameTime: 0.036 ms
[desktop] blur-radius=5:effect=blur:passes=1:separable=true:windows=4: FPS: 9557 FrameTime: 0.105 ms
[desktop] effect=shadow:windows=4: FPS: 17248 FrameTime: 0.058 ms
[buffer] columns=200:interleave=false:update-dispersion=0.9:update-fraction=0.5:update-method=map: FPS: 3425 FrameTime: 0.292 ms
[buffer] columns=200:interleave=false:update-dispersion=0.9:update-fraction=0.5:update-method=subdata: FPS: 3852 FrameTime: 0.260 ms
[buffer] columns=200:interleave=true:update-dispersion=0.9:update-fraction=0.5:update-method=map: FPS: 4847 FrameTime: 0.206 ms
[ideas] speed=duration: FPS: 24299 FrameTime: 0.041 ms
[jellyfish] <default>: FPS: 20993 FrameTime: 0.048 ms
[terrain] <default>: FPS: 2663 FrameTime: 0.376 ms
[shadow] <default>: FPS: 17595 FrameTime: 0.057 ms
[refract] <default>: FPS: 6201 FrameTime: 0.161 ms
[conditionals] fragment-steps=0:vertex-steps=0: FPS: 28276 FrameTime: 0.035 ms
[conditionals] fragment-steps=5:vertex-steps=0: FPS: 28159 FrameTime: 0.036 ms
[conditionals] fragment-steps=0:vertex-steps=5: FPS: 23158 FrameTime: 0.043 ms
[function] fragment-complexity=low:fragment-steps=5: FPS: 24062 FrameTime: 0.042 ms
[function] fragment-complexity=medium:fragment-steps=5: FPS: 27253 FrameTime: 0.037 ms
[loop] fragment-loop=false:fragment-steps=5:vertex-steps=5: FPS: 28133 FrameTime: 0.036 ms
[loop] fragment-steps=5:fragment-uniform=false:vertex-steps=5: FPS: 28144 FrameTime: 0.036 ms
[loop] fragment-steps=5:fragment-uniform=true:vertex-steps=5: FPS: 28068 FrameTime: 0.036 ms
=======================================================
glmark2 Score: 22083
=======================================================
Config laptop
- suspend-then-hibernate swap partition
Installation de machine avec RT Kernel et accélération graphique
Déploiement avec FAI-Project
https://fai-project.org/FAIme/
- Sélectionner Ubuntu
- Basculer en mode avancé en cliquant sur Toggle
- Si le mdp est laissé vide, ce sera le code du projet FAI
- Choisir un utilisateur, par ex.
etudiant - Attention si vous choisissez US, le clavier sera QWERTZ
Your job BYDEGIKS is currently being processed. https://fai-project.org/myimages/BYDEGIKS
Your web config:
type="install" partition="ONE" desktop="XORG" suite="ubuntu" keyboard="fr" addpkgs="software-properties-common terminator nano htop wget curl gpg apt-transport-https python3-rosdep2 ubuntu-realtime docker-ce docker-ce-cli containerd.io docker-buildx-plugin docker-compose-plugin" email="robotics@hentz.eu" rootpw='' username="etudiant" userpw='' gittype="" gituser="" repo="deb [trusted=yes] http://download.docker.com/linux/ubuntu noble stable" postinst="install_pc_aica.sh" rclocal="1" datapart="" cmdline="" options="STANDARD REBOOT RECOMMENDS"
curl "https://fai-project.org/cgi/faime.cgi?type=install;username=etudiant;partition=ONE;repo=http%3A%2F%2Fdownload.docker.com%2Flinux%2Fubuntu%20noble%20stable;keyboard=fr;suite=ubuntu;desktop=XORG;cl6=STANDARD;addpkgs=software-properties-common%20terminator%20nano%20htop%20wget%20curl%20gpg%20apt-transport-https%20python3-rosdep2%20ubuntu-realtime%20docker-ce%20docker-ce-cli%20containerd.io%20docker-buildx-plugin%20docker-compose-plugin;cl9=RECOMMENDS;email=robotics%40hentz.eu;postinst=install_pc_aica.sh;rclocal=1;cl8=REBOOT;sbm=2"
sudo apt install ubuntu-realtime
sudo nano /etc/default/grub
sudo update-grub
uname -v | cut -d" " -f1-4
sudo apt install cpufrequtils
sudo systemctl disable ondemand
sudo systemctl enable cpufrequtils
sudo sh -c 'echo "GOVERNOR=performance" > /etc/default/cpufrequtils'
sudo systemctl daemon-reload && sudo systemctl restart cpufrequtils
sudo systemctl status docker
cpufreq-info
wget <https://developer.download.nvidia.com/compute/cuda/repos/ubuntu2404/x86_64/cuda-keyring_1.1-1_all.deb>
sudo dpkg -i cuda-keyring_1.1-1_all.deb
sudo apt update
sudo apt install nvidia-driver-pinning-570
sudo IGNORE_PREEMPT_RT_PRESENCE=1 apt install cuda-drivers
sudo apt-get update && sudo apt-get install -y --no-install-recommends ca-certificates curl gnupg2
sudo apt-get remove docker docker-engine docker.io containerd runc
sudo install -m 0755 -d /etc/apt/keyrings
sudo curl -fsSL <https://download.docker.com/linux/ubuntu/gpg> -o /etc/apt/keyrings/docker.asc
sudo chmod a+r /etc/apt/keyrings/docker.asc
# Add the repository to Apt sources:
sudo tee /etc/apt/sources.list.d/docker.sources <<EOF
Types: deb
URIs: <https://download.docker.com/linux/ubuntu>
Suites: $(. /etc/os-release && echo "${UBUNTU_CODENAME:-$VERSION_CODENAME}")
Components: stable
Signed-By: /etc/apt/keyrings/docker.asc
EOF
sudo apt update
sudo apt install docker-ce docker-ce-cli containerd.io docker-buildx-plugin docker-compose-plugin
sudo docker run hello-world
sudo usermod -aG docker $USER
curl -fsSL <https://nvidia.github.io/libnvidia-container/gpgkey> | sudo gpg --dearmor -o /usr/share/keyrings/nvidia-container-toolkit-keyring.gpg && curl -s -L <https://nvidia.github.io/libnvidia-container/stable/deb/nvidia-container-toolkit.list> | sed 's#deb <https://#deb> [signed-by=/usr/share/keyrings/nvidia-container-toolkit-keyring.gpg] <https://#g>' | sudo tee /etc/apt/sources.list.d/nvidia-container-toolkit.list
sudo apt update
sudo apt install nvidia-container-toolkit
sudo nvidia-ctk runtime configure --runtime=docker
sudo reboot
sudo docker run --rm --runtime=nvidia --gpus all ubuntu nvidia-smi
git clone <https://github.com/gautz/unistra-aica-practical> aica
cd ~/aica/package-template
docker build -f aica-package.toml -t object-detection-utils .RT Kernel
RT Kernel ou Low Latency ?
Soit on build à la main (https://innovation.iha.unistra.fr/books/robotique-open-source/page/commander-un-robot-ur-avec-le-driver-ros2#bkmrk-installation-d%27ubunt ), soit on prend un Kernel qui est dispo dans les dépôts
sudo apt list *realtime* linux*rt
ubuntu-realtime
linux-realtime
linux-image-6.8.1-1015-realtime- On install
sudo apt install ubuntu-realtime - Permettre le choix du noyau au démarrage (grub)
sudo nano /etc/default/grub
GRUB_SAVEDEFAULT=true
GRUB_DEFAULT="saved" # Le dernier Kernel choisi devient le Kernel par défaut
#GRUB_DEFAULT="Advanced options for Ubuntu>Ubuntu, with Linux 6.8.1-1015-realtime"
#GRUB_TIMEOUT_STYLE=hidden
GRUB_TIMEOUT=3 # 3 secondes pour choisir le Kernel à démarrersudo update-grub
https://unix.stackexchange.com/questions/198003/set-the-default-kernel-in-grub
https://www.gnu.org/software/grub/manual/grub/html_node/Simple-configuration.html
Accélération GPU
Que ce soit pour LeRobot, pour AICA, ou en général pour utiliser des modèles d'IA, l'installation de Linux avec les bons drivers graphiques n'est pas toujours aisé.
On veut accéder dans Docker aux capacités Compute d'un GPU, essentiellement fournie par NVidia Cuda. On différentiera l'installation d'un serveur qui n'a pas besoin de l'accélération graphique liée à l'affichage, ni de capacités temps-réel, contrairement à un PC de commande de robot.
NVidia Driver et RT Kernel
https://interfacinglinux.com/2024/01/16/nvidia-cuda-on-debian-real-time-kernel/
https://gist.github.com/pantor/9786c41c03a97bca7a52aa0a72fa9387
Prérequis
- Les paquets Nvidia pour les Kernels installés ne sont pas nécessairement dispos, mais le patch est automatique
- Par contre le patch échoue si un RT Kernel est détecté
- Il faut forcer le patch à s'appliquer sur le RT Kernel
export IGNORE_PREEMPT_RT_PRESENCE=1- On peut l'ajouter au
~.bashrcpour ne pas oublier de le faire lors d'un upgrade de Kernel) - On installe les headers pour le Kernel en cours
sudo apt install linux-headers-$(uname -r)- S'il y a d'autres Kernel, installer les header
sudo apt install linux-headers-...
sudo apt install nvidia-driver installe la dernière version du driver dispo, mais cuda-drivers n'est pas forcément dispo pour cette version. Donc on va chercher la bonne version.
Pour supprimer tous les drivers nvidia précédemment installés. A utiliser avec précautions : sudo apt autoremove --purge *nvidia*
Installation du nvidia-driver et de cuda
- On installe le dépôt CUDA
-
wget https://developer.download.nvidia.com/compute/cuda/repos/$distro/x86_64/cuda-keyring_1.1-1_all.deb sudo dpkg -i cuda-keyring_1.1-1_all.deb sudo apt update - On regarde les version de
nvidia-driverqui peuvent être pin : sudo apt install nvidia-driver-pinning-*- On regarde les version des
cuda-driversqui peuvent être installées : sudo apt list cuda-drivers-*- On regarde quelle version de
nvidia-driverserait installé pour une version voulue de cuda : - Exemple :
sudo apt install cuda-13-1OUsudo apt install cuda-12-8 - On choisi de pin la version de
nvidia-driverqui a uncuda-driverset qui permet d'installer la bonne version de CUDA : - Exemple :
sudo apt install nvidia-driver-pinning-550installe CUDA 12.5 - Exemple :
sudo apt install nvidia-driver-pinning-560installe CUDA 12.6 - Exemple :
sudo apt install nvidia-driver-pinning-570installe CUDA 12.8 - Exemple :
sudo apt install nvidia-driver-pinning-580installe CUDA 13.0 - On install les drivers propriétaires (Calcul et Affichage GPU) :
sudo IGNORE_PREEMPT_RT_PRESENCE=1 apt install cuda-drivers(pour patcher même les RT Kernel)- Installer nvidia-container-toolkit pour Docker :
sudo apt install nvidia-container-toolkit
Optionnel
- Si on est sur un serveur, on peut aussi n'installer que les composants de Calcul GPU :
sudo apt -V install libnvidia-compute nvidia-dkms
- Si on est sur un PC, on peut aussi n'installer que les composants d'Affichage GPU :
sudo apt -V install libnvidia-gl nvidia-dkms
- Pour installer les composants Libres (Open Kernel Modules), voir :
https://docs.nvidia.com/datacenter/tesla/driver-installation-guide/ubuntu.html
- Installer le SDK CUDA
sudo apt install cuda-toolkit - puis les paquets GDS
sudo apt install nvidia-gds(qui contientnvidia-fskernel module) - pour
arm64-jetson:sudo apt install cuda-compat
https://docs.nvidia.com/cuda/cuda-installation-guide-linux/#network-repo-installation-for-ubuntu
Vérification de la compatibilité GPU - Application IA
Procédure :
- Lister les applications d'IA qu'on va vouloir faire tourner
- Regarder les prérequis de la version actuelle de l'application IA
- Regarder les prérequis de ses dépendances
- Par exemple YOLO requiert onnxruntime-gpu
- Regarder les prérequis en termes GPU (Compute Capability, etc.)
- Regarder les prérequis en termes d'environnement d'exécution
- Version d'Ubuntu et drivers dispos
- Version de CUDA, cuDNN, Pytorch
- Acheter le GPU nécessaire et installer la version d'Ubuntu nécessaire
- Si on est motivé et qu'on veut essayer avec notre GPU et notre version d'Ubuntu actuelle, regarder les prérequis des versions précédentes et voir s'il y en a une qui passe
On a une application d'IA donnée
Par exemple YOLO :
- utilise onnxruntime https://onnxruntime.ai/docs/execution-providers/CUDA-ExecutionProvider.html
- onnxruntime-gpu >=1.18.1 : CUDA 12.x ; cuDNN 9.x ; PyTorch >= 2.4.0
- onnxruntime-gpu < 1.18.0 : CUDA 12.x ; cuDNN 8.x ; PyTorch < 2.4.0
- onnxruntime-gpu 1.18-1.20 : CUDA 11.8 ; cuDNN 8.x ; PyTorch <= 2.3.1
- onnxruntime-gpu >= 1.16 supports CC 6.0 or above
- onnxruntime-gpu < 1.18 requiert CUDA 11.x
- L'environnement YOLO de AICA utilise onnxruntime-gpu=1.22.2
- onnxruntime-gpu >=1.24 requiert CC 6.0 pour CUDA 12 et CC 7.5 pour CUDA 13
Différentes versions de l'environnement d'exécution
- Grâce à la compatibilité des versions mineures de Nvidia CUDA, une application d'IA compilée avec CUDA 11.8 peut être exécutée avec n'importe laquelle des version CUDA 11.x . Idem pour CUDA 12.x .
- Par contre une application cuDNN 8.x n'est pas compatible avec cuDNN 9.x .
- PyTorch 2.3 et inférieur utilisent cuDNN 8.x
- PyTorch 2.4 et supérieur utilisent cuDNN 9.x
- Il faut donc choisir la version de Pytorch en fonction des versions de CUDA et cuDNN qui sont compatibles avec l'environnement d'exécution (carte graphique et driver)
https://docs.nvidia.com/deeplearning/cudnn/backend/latest/reference/support-matrix.html
cuDNN>=v9.12.0 supporte :
- CUDA 12.x (nvidia-driver>=525.60.13)
- CUDA 13.x (nvidia-driver>=580.65.06)
- CUDA CC>=7.5
cuDNN<=v9.11.1
- CUDA 12.x (nvidia-driver>=525.60.13)
- CUDA CC>=5.0-9.0 (10.0-12.0 avec CUDA>=12.8 et nvidia-driver>=570.26)
cuDNN<=v9.10.2 :
- CUDA 12.x (nvidia-driver>=525.60.13) (12.8-9 pour >=570.26 et CC 10-12)
- CUDA 11.x (nvidia-driver>=450.80.02)
- CUDA CC>=5.0-9.0 (10.0-12.0 avec CUDA>=12.8 et nvidia-driver>=570.26)
Compatibilité de version d'Ubuntu
Sur Ubuntu 24.04 :
- les
sudo apt list nvidia-driver*dispos sont 460-470,515-590 - les
sudo apt list cuda-drivers*dispos sont 550,555,560,565,570,575,580 - les
sudo apt list nvidia-driver-pinning*dispo sont 570,580,590 - les
sudo apt list cuda-toolkit*seuls CUDA 12.5-13.1 sont dispos
On a une carte graphique donnée :
- Vérification du Compute Capability (CC) https://developer.nvidia.com/cuda/gpus
- Si on est dans cette liste, donc CC >= 7.5 c'est TOP, on est compatible avec onnx et CUDA 13
- A partir de 6.0 on est compatible avec onnx et CUDA 12 (mais pas CUDA 13)
- On conseille de laisser tomber l'IA avec des CC de 5.0 ou inférieur
- Si on a 5.2 >= CC < 6.0 , on a une carte Legacy, voir ci-dessous, c'est compliqué
- On vérifie la version de CUDA Max supportée en fonction du CC : https://stackoverflow.com/questions/28932864/which-compute-capability-is-supported-by-which-cuda-versions
- On va donc pouvoir chercher une compatibilité d'exécution avec CUDA 12.x et CUDA 11.x , mais pas CUDA 13.x
Problèmes avec les GPU NVidia anciens : https://github.com/ultralytics/ultralytics/issues/5305
GPU NVidia anciens / Legacy
On lance Yolo et on a l'erreur suivante :
10:17:40.111 [yolo_executor] error: ONNX Runtime error during model query: Non-zero status code returned while running QuickGelu node. Name:'node_silu/QuickGeluFusion/' Status Message: CUDA error cudaErrorNoKernelImageForDevice:no kernel image is available for execution on the device
- onnxruntime-gpu 1.14 supports CC 3.7 or above
- onnxruntime-gpu 1.15 supports CC 5.2 or above
- onnxruntime-gpu >=1.16 supports CC 6.0 or above
- onnxruntime-gpu <1.18 requiert CUDA 11.x
- >1.24 requiert CC 6.0 pour CUDA 12 et CC 7.5 pour CUDA 13
- L'environnement YOLO de AICA utilise onnxruntime-gpu=1.22.2
- FP16 models ne tournent qu'à partir de CC 5.3
- C'est pour ça que l'erreur indique qu'il n'y a pas de kernel FP16 compilé pour notre GPU
- Problème : CUDA 11.x n'est pas dispo sur Ubuntu 24.04
- Mais peut être installé : https://askubuntu.com/questions/1536271/can-i-install-cuda-11-4-in-ubuntu-24-04-if-so-how
Solution (voir analyse ci-dessous) :
- Installer le driver 470
- Installer CUDA 11.8? en suivant https://askubuntu.com/questions/1536271/can-i-install-cuda-11-4-in-ubuntu-24-04-if-so-how
- Exporter le modèle onnx en kernel FP32
- Déployer le modèle YOLO dans un environnement Legacy avec onnxruntime-gpu 1.15
https://github.com/microsoft/onnxruntime/issues/17861#issuecomment-1758098712
On a une carte graphique donnée | par exemple Quadro M620 (GM107GLM) :
- Vérification du Compute Capability https://developer.nvidia.com/cuda/gpus/legacy | CC5.2
- On conseille de laisser tomber l'IA avec des Compute Capability de 5.0 ou inférieur |
- Si on a une Compute Capability entre 5.2 et 7.2 , on peut envisager des choses mais c'est compliqué
- On vérifie la version de CUDA Max supportée : https://stackoverflow.com/questions/28932864/which-compute-capability-is-supported-by-which-cuda-versions | pour CC5.2 : CUDA 12.x
- On va donc pouvoir chercher une compatibilité d'exécution avec CUDA 12.x et CUDA 11.x , mais pas CUDA 13.x
- Les
nvidia-driverdispos sont 460-470,515-590 (535 est testé/recommandé) - mais les
cuda-driversdispos sont 550,555,560,565,570,575,580 - et les
nvidia-driver-pinninget dispo de 570,580,590 - Exemple :
sudo apt install nvidia-driver-470mais CUDA 11.x pas dispo sur Ubuntu 24.04 - Exemple :
sudo apt install nvidia-driver-pinning-550installe CUDA 12.5 - Exemple :
sudo apt install nvidia-driver-pinning-560installe CUDA 12.6 - Exemple :
sudo apt install nvidia-driver-pinning-570installe CUDA 12.8 - Exemple :
sudo apt install nvidia-driver-pinning-580installe CUDA 13.0 - Avec CUDA 12.0-1 et le driver 535 on peut avoir v8.9.2<=cuDNN<=v9.11.1
- Avec CUDA 12.2 v8.9.7<=cuDNN<=v9.11.1
- Avec CUDA >=12.3 v9<=cuDNN<=v9.11.1
- Donc il faudrait CUDA 12.0-2
- mais
sudo apt list cuda-toolkit*seuls CUDA 12.5-13.1 sont dispos
Option 1 : Driver Version: 580 CUDA Version: 13.0
- On n'a pas cuDNN v8
- on a
cuda-drivers-580
Option 2 : Driver Version: 570 CUDA Version: 12.8
- on a
cuda-drivers-570
Option 3 : Driver Version: 535.288.01 CUDA Version: 12.2
- On a v8.9.7<=cuDNN<=v9.11.1
- Mais on n'a pas
cuda-drivers
Option 4 : Driver Version: 470 CUDA Version: 11.x
- Installer CUDA 11.8? en suivant https://askubuntu.com/questions/1536271/can-i-install-cuda-11-4-in-ubuntu-24-04-if-so-how
- On n'a pas
cuda-drivers-> Problème ?
https://pytorch.org/get-started/previous-versions/
- Avec pytorch 2.1.1 et 2.2.0 , c'est cuddn 8.9.2 qui est installé par défaut
- pytorch <2.2.0 n'est plus supporté dans pip
https://docs.nvidia.com/deeplearning/cudnn/archives/cudnn-892/support-matrix/index.html
cuDNN=v8.9.2 :
- CUDA 12.0-1 (nvidia-driver>=525.60.13)
- CUDA 11.x (nvidia-driver>=450.80.02)
- CUDA CC>=5.0 <=8.6 (8.9-9.0 avec CUDA>=11.8)
- Avec pytorch ... c'est cuddn 8.9.7 qui est installé par défaut
https://docs.nvidia.com/deeplearning/cudnn/archives/cudnn-897/support-matrix/index.html
cuDNN=v8.9.7 :
- CUDA 12.0-2 (nvidia-driver>=525.60.13)
- CUDA 11.x (nvidia-driver>=450.80.02)
- CUDA CC>=5.0 <=8.6 (8.9-9.0 avec CUDA>=11.8)
Voir aussi https://docs.nvidia.com/deeplearning/cudnn/onnxruntime-gpuarchives/index.html
Avec :
#syntax=ghcr.io/aica-technology/app-builder:v2
# launch with bash:
[core]
"image" = "v5.1.0"
[packages]
# add components
#"@aica/components/rl-policy-components" = "v3.0.0"
"@aica/components/advanced-perception" = "v1.0.0" # contains YoloExecutor
"@aica/components/core-vision" = "v1.1.2" # contains CameraStreamer
"@aica/foss/toolkits/cuda" = "v1.0.0-cuda24.12" # prerequisite for NVidia GPU acceleration
"@aica/foss/toolkits/ml" = "v1.0.0-gpu24.12" # prerequisite for ML model inference
# other extensions
"object-detection-utils" # self-built component to feed goal frame extracted from yolo to robot velocity controller
# add hardware collections
"@aica/collections/intel-realsense-collection" = "v2.0.1" # D4XX and L515 cameras models, stream RGBD
"@aica/collections/ur-collection" = "v4.3.0"On a :
ros2@iha-portrob-1:~/examples$ python3 -m torch.utils.collect_env
<frozen runpy>:128: RuntimeWarning: 'torch.utils.collect_env' found in sys.modules after import of package 'torch.utils', but prior to execution of 'torch.utils.collect_env'; this may result in unpredictable behaviour
Collecting environment information...
PyTorch version: 2.6.0+cu126
Is debug build: False
CUDA used to build PyTorch: 12.6
ROCM used to build PyTorch: N/A
OS: Ubuntu 24.04.2 LTS (x86_64)
GCC version: (Ubuntu 13.3.0-6ubuntu2~24.04) 13.3.0
Clang version: Could not collect
CMake version: version 3.28.3
Libc version: glibc-2.39
Python version: 3.12.3 (main, Feb 4 2025, 14:48:35) [GCC 13.3.0] (64-bit runtime)
Python platform: Linux-6.17.0-14-generic-x86_64-with-glibc2.39
Is CUDA available: True
CUDA runtime version: 12.6.85
CUDA_MODULE_LOADING set to: LAZY
GPU models and configuration: GPU 0: Quadro M620
Nvidia driver version: 570.211.01
cuDNN version: Probably one of the following:
/usr/lib/libcudnn.so.9.6.0
/usr/lib/libcudnn_adv.so.9.6.0
/usr/lib/libcudnn_cnn.so.9.6.0
/usr/lib/libcudnn_engines_precompiled.so.9.6.0
/usr/lib/libcudnn_engines_runtime_compiled.so.9.6.0
/usr/lib/libcudnn_graph.so.9.6.0
/usr/lib/libcudnn_heuristic.so.9.6.0
/usr/lib/libcudnn_ops.so.9.6.0
HIP runtime version: N/A
MIOpen runtime version: N/A
Is XNNPACK available: True
CPU:
Architecture: x86_64
CPU op-mode(s): 32-bit, 64-bit
Address sizes: 39 bits physical, 48 bits virtual
Byte Order: Little Endian
CPU(s): 4
On-line CPU(s) list: 0-3
Vendor ID: GenuineIntel
Model name: Intel(R) Core(TM) i5-7440HQ CPU @ 2.80GHz
CPU family: 6
Model: 158
Thread(s) per core: 1
Core(s) per socket: 4
Socket(s): 1
Stepping: 9
CPU(s) scaling MHz: 84%
CPU max MHz: 3800.0000
CPU min MHz: 800.0000
BogoMIPS: 5599.85
Flags: fpu vme de pse tsc msr pae mce cx8 apic sep mtrr pge mca cmov pat pse36 clflush dts acpi mmx fxsr sse sse2 ss ht tm pbe syscall nx pdpe1gb rdtscp lm constant_tsc art arch_perfmon pebs bts rep_good nopl xtopology nonstop_tsc cpuid aperfmperf pni pclmulqdq dtes64 monitor ds_cpl vmx smx est tm2 ssse3 sdbg fma cx16 xtpr pdcm pcid sse4_1 sse4_2 x2apic movbe popcnt tsc_deadline_timer aes xsave avx f16c rdrand lahf_lm abm 3dnowprefetch cpuid_fault epb pti ssbd ibrs ibpb stibp tpr_shadow flexpriority ept vpid ept_ad fsgsbase tsc_adjust bmi1 avx2 smep bmi2 erms invpcid mpx rdseed adx smap clflushopt intel_pt xsaveopt xsavec xgetbv1 xsaves dtherm ida arat pln pts hwp hwp_notify hwp_act_window hwp_epp vnmi md_clear flush_l1d arch_capabilities
Virtualization: VT-x
L1d cache: 128 KiB (4 instances)
L1i cache: 128 KiB (4 instances)
L2 cache: 1 MiB (4 instances)
L3 cache: 6 MiB (1 instance)
NUMA node(s): 1
NUMA node0 CPU(s): 0-3
Vulnerability Gather data sampling: Vulnerable
Vulnerability Ghostwrite: Not affected
Vulnerability Indirect target selection: Not affected
Vulnerability Itlb multihit: KVM: Mitigation: Split huge pages
Vulnerability L1tf: Mitigation; PTE Inversion; VMX conditional cache flushes, SMT disabled
Vulnerability Mds: Mitigation; Clear CPU buffers; SMT disabled
Vulnerability Meltdown: Mitigation; PTI
Vulnerability Mmio stale data: Mitigation; Clear CPU buffers; SMT disabled
Vulnerability Old microcode: Not affected
Vulnerability Reg file data sampling: Not affected
Vulnerability Retbleed: Mitigation; IBRS
Vulnerability Spec rstack overflow: Not affected
Vulnerability Spec store bypass: Mitigation; Speculative Store Bypass disabled via prctl
Vulnerability Spectre v1: Mitigation; usercopy/swapgs barriers and __user pointer sanitization
Vulnerability Spectre v2: Mitigation; IBRS; IBPB conditional; STIBP disabled; RSB filling; PBRSB-eIBRS Not affected; BHI Not affected
Vulnerability Srbds: Mitigation; Microcode
Vulnerability Tsa: Not affected
Vulnerability Tsx async abort: Mitigation; TSX disabled
Vulnerability Vmscape: Mitigation; IBPB before exit to userspace
Versions of relevant libraries:
[pip3] ament-flake8==0.17.2
[pip3] flake8==7.0.0
[pip3] flake8-builtins==2.1.0
[pip3] flake8-comprehensions==3.14.0
[pip3] flake8-docstrings==1.6.0
[pip3] flake8-import-order==0.18.2
[pip3] flake8-quotes==3.4.0
[pip3] numpy==1.26.4
[pip3] nvidia-cublas-cu12==12.6.4.1
[pip3] nvidia-cuda-cupti-cu12==12.6.80
[pip3] nvidia-cuda-nvrtc-cu12==12.6.77
[pip3] nvidia-cuda-runtime-cu12==12.6.77
[pip3] nvidia-cudnn-cu12==9.5.1.17
[pip3] nvidia-cufft-cu12==11.3.0.4
[pip3] nvidia-curand-cu12==10.3.7.77
[pip3] nvidia-cusolver-cu12==11.7.1.2
[pip3] nvidia-cusparse-cu12==12.5.4.2
[pip3] nvidia-cusparselt-cu12==0.6.3
[pip3] nvidia-nccl-cu12==2.21.5
[pip3] nvidia-nvjitlink-cu12==12.6.85
[pip3] nvidia-nvtx-cu12==12.6.77
[pip3] onnxruntime-gpu==1.22.2
[pip3] pytorch3d==0.7.8
[pip3] torch==2.6.0+cu126
[pip3] torchaudio==2.6.0+cu126
[pip3] torchvision==0.21.0+cu126
[pip3] triton==3.2.0
[conda] Could not collectAvec :
"@aica/foss/toolkits/cuda" = "v1.0.0-cuda24.12" # prerequisite for NVidia GPU acceleration
"@aica/foss/toolkits/ml" = "v1.0.0-gpu24.12" # prerequisite for ML model inferenceOn a :
ros2@iha-portrob-1:~/examples$ python3 -m torch.utils.collect_env
<frozen runpy>:128: RuntimeWarning: 'torch.utils.collect_env' found in sys.modules after import of package 'torch.utils', but prior to execution of 'torch.utils.collect_env'; this may result in unpredictable behaviour
Collecting environment information...
PyTorch version: 2.6.0+cu126
Is debug build: False
CUDA used to build PyTorch: 12.6
ROCM used to build PyTorch: N/A
OS: Ubuntu 24.04.2 LTS (x86_64)
GCC version: (Ubuntu 13.3.0-6ubuntu2~24.04) 13.3.0
Clang version: Could not collect
CMake version: version 3.28.3
Libc version: glibc-2.39
Python version: 3.12.3 (main, Feb 4 2025, 14:48:35) [GCC 13.3.0] (64-bit runtime)
Python platform: Linux-6.17.0-14-generic-x86_64-with-glibc2.39
Is CUDA available: True
CUDA runtime version: 12.6.85
CUDA_MODULE_LOADING set to: LAZY
GPU models and configuration: GPU 0: Quadro M620
Nvidia driver version: 570.211.01
cuDNN version: Probably one of the following:
/usr/lib/libcudnn.so.9.6.0
/usr/lib/libcudnn_adv.so.9.6.0
/usr/lib/libcudnn_cnn.so.9.6.0
/usr/lib/libcudnn_engines_precompiled.so.9.6.0
/usr/lib/libcudnn_engines_runtime_compiled.so.9.6.0
/usr/lib/libcudnn_graph.so.9.6.0
/usr/lib/libcudnn_heuristic.so.9.6.0
/usr/lib/libcudnn_ops.so.9.6.0
HIP runtime version: N/A
MIOpen runtime version: N/A
Is XNNPACK available: True
CPU:
Architecture: x86_64
CPU op-mode(s): 32-bit, 64-bit
Address sizes: 39 bits physical, 48 bits virtual
Byte Order: Little Endian
CPU(s): 4
On-line CPU(s) list: 0-3
Vendor ID: GenuineIntel
Model name: Intel(R) Core(TM) i5-7440HQ CPU @ 2.80GHz
CPU family: 6
Model: 158
Thread(s) per core: 1
Core(s) per socket: 4
Socket(s): 1
Stepping: 9
CPU(s) scaling MHz: 81%
CPU max MHz: 3800.0000
CPU min MHz: 800.0000
BogoMIPS: 5599.85
Flags: fpu vme de pse tsc msr pae mce cx8 apic sep mtrr pge mca cmov pat pse36 clflush dts acpi mmx fxsr sse sse2 ss ht tm pbe syscall nx pdpe1gb rdtscp lm constant_tsc art arch_perfmon pebs bts rep_good nopl xtopology nonstop_tsc cpuid aperfmperf pni pclmulqdq dtes64 monitor ds_cpl vmx smx est tm2 ssse3 sdbg fma cx16 xtpr pdcm pcid sse4_1 sse4_2 x2apic movbe popcnt tsc_deadline_timer aes xsave avx f16c rdrand lahf_lm abm 3dnowprefetch cpuid_fault epb pti ssbd ibrs ibpb stibp tpr_shadow flexpriority ept vpid ept_ad fsgsbase tsc_adjust bmi1 avx2 smep bmi2 erms invpcid mpx rdseed adx smap clflushopt intel_pt xsaveopt xsavec xgetbv1 xsaves dtherm ida arat pln pts hwp hwp_notify hwp_act_window hwp_epp vnmi md_clear flush_l1d arch_capabilities
Virtualization: VT-x
L1d cache: 128 KiB (4 instances)
L1i cache: 128 KiB (4 instances)
L2 cache: 1 MiB (4 instances)
L3 cache: 6 MiB (1 instance)
NUMA node(s): 1
NUMA node0 CPU(s): 0-3
Vulnerability Gather data sampling: Vulnerable
Vulnerability Ghostwrite: Not affected
Vulnerability Indirect target selection: Not affected
Vulnerability Itlb multihit: KVM: Mitigation: Split huge pages
Vulnerability L1tf: Mitigation; PTE Inversion; VMX conditional cache flushes, SMT disabled
Vulnerability Mds: Mitigation; Clear CPU buffers; SMT disabled
Vulnerability Meltdown: Mitigation; PTI
Vulnerability Mmio stale data: Mitigation; Clear CPU buffers; SMT disabled
Vulnerability Old microcode: Not affected
Vulnerability Reg file data sampling: Not affected
Vulnerability Retbleed: Mitigation; IBRS
Vulnerability Spec rstack overflow: Not affected
Vulnerability Spec store bypass: Mitigation; Speculative Store Bypass disabled via prctl
Vulnerability Spectre v1: Mitigation; usercopy/swapgs barriers and __user pointer sanitization
Vulnerability Spectre v2: Mitigation; IBRS; IBPB conditional; STIBP disabled; RSB filling; PBRSB-eIBRS Not affected; BHI Not affected
Vulnerability Srbds: Mitigation; Microcode
Vulnerability Tsa: Not affected
Vulnerability Tsx async abort: Mitigation; TSX disabled
Vulnerability Vmscape: Mitigation; IBPB before exit to userspace
Versions of relevant libraries:
[pip3] ament-flake8==0.17.2
[pip3] flake8==7.0.0
[pip3] flake8-builtins==2.1.0
[pip3] flake8-comprehensions==3.14.0
[pip3] flake8-docstrings==1.6.0
[pip3] flake8-import-order==0.18.2
[pip3] flake8-quotes==3.4.0
[pip3] numpy==1.26.4
[pip3] nvidia-cublas-cu12==12.6.4.1
[pip3] nvidia-cuda-cupti-cu12==12.6.80
[pip3] nvidia-cuda-nvrtc-cu12==12.6.77
[pip3] nvidia-cuda-runtime-cu12==12.6.77
[pip3] nvidia-cudnn-cu12==9.5.1.17
[pip3] nvidia-cufft-cu12==11.3.0.4
[pip3] nvidia-curand-cu12==10.3.7.77
[pip3] nvidia-cusolver-cu12==11.7.1.2
[pip3] nvidia-cusparse-cu12==12.5.4.2
[pip3] nvidia-cusparselt-cu12==0.6.3
[pip3] nvidia-nccl-cu12==2.21.5
[pip3] nvidia-nvjitlink-cu12==12.6.85
[pip3] nvidia-nvtx-cu12==12.6.77
[pip3] onnxruntime-gpu==1.22.2
[pip3] pytorch3d==0.7.8
[pip3] torch==2.6.0+cu126
[pip3] torchaudio==2.6.0+cu126
[pip3] torchvision==0.21.0+cu126
[pip3] triton==3.2.0
[conda] Could not collectSources
https://interfacinglinux.com/2024/01/16/nvidia-cuda-on-debian-real-time-kernel/
https://forum.zorin.com/t/nvidia-drivers-cannot-be-installed-because-of-real-time-kernel/46419/22
Machine Learning LeRobot avec SO-ARM101
Installation et prérequis
- Une carte graphique NVidia et une installation de Cuda ?
- Comparaison cartes graphiques (un peu dépassé car ne prend pas en compte les dernières génération type 5090) https://www.geeksforgeeks.org/machine-learning/choosing-the-right-gpu-for-your-machine-learning/
- Puissance de calcul dispo à l'Innov'Lab TPS https://www.innovlab-tps.net/calcul-et-stockage.html
- Pour l'entraînement des modèles : Serveur de calcul Apollo 6500 doté de 4 GPU HGX A100, 80Go
- Pour l'inférence des modèles : Terminaux de calcul dotés GPU Nvidia RTX 4090, 24Go
Prérequis pour l'exécution d'un modèle d'IA :
- Config minimum : L'exécution semble résulter en un mouvement saccadé du robot sur une Quadro P620 (2 GB GDDR5).
- Config recommandée : 4-8 GB GDDR, testé avec RTX 2080 Super de 2019 (8 GB GDDR6)
- Il faut au moins 16 GB de RAM (CPU) sinon elle sature pendant l'enregistrement du dataset d'évaluation.
Prérequis pour l'entraînement d'un modèle d'IA :
- L'entrainement avec 100 épisodes et 100 000 steps a mis 12H sur une RTX 2080 Super de 2019
- mais
batch_size=8alors qu'il faut un minimum de 16, et dans l'idéal 64. Cela résulte sans doute en des mouvements saccadés et une mauvaise généralisation du modèle (variation de la position de la pile). - Il n'aboutit pas au bout de plus de 24H sur une Quadro P620 (via WSL2 et Docker)
- mais
- Config minimum pour ACT :
batch_size=16- Tesla T4 (gratuit 5H / mois sur Google Colab) on a 15G de RAM qui permet donc un
batch_size=15 - https://github.com/huggingface/lerobot/issues/2213
- Tesla T4 (gratuit 5H / mois sur Google Colab) on a 15G de RAM qui permet donc un
- Config recommandée pour ACT :
batch_size=64- avec A100 (12€ les 100 compute units, 70 = ~5H sur Google Colab) on a 40G de RAM ou 80G de RAM (extra RAM)
- https://github.com/huggingface/lerobot/blob/main/docs/source/notebooks.mdx#training-act
- https://colab.research.google.com/github/antonilo/real_world_robot_learning_sp25/blob/main/_tutorials/lerobot_tutorial/lerobot_tutorial.ipynb#scrollTo=ff7eafe4
- avec un
batch_size=64la RAM consommée était d'environ 50G, l'entraînement a mis 7H environ pour environ 80 compute units, soit environ 10€ - https://huggingface.co/gautz/act_so101_pick_red_18650_drop_black_box_test2_100ep_64batch_60ksteps
- https://wandb.ai/hentz-robotics/lerobot/runs/niiti0v3?nw=nwusergautz
Installation sous Linux
- Installer Miniconda pour Linux : l'environnement de développement Python
wget https://repo.anaconda.com/miniconda/Miniconda3-latest-Linux-x86_64.sh
# Vérifier que la clé SHA256 de Miniconda3-latest-Linux-x86_64.sh ici : https://repo.anaconda.com/miniconda/ correspond à :
sha256sum ~/Miniconda3-latest-Linux-x86_64.sh
bash ~/Miniconda3-latest-Linux-x86_64.sh
source ~/.bashrc- Créer et activer l'environnement Conda
conda create -y -n lerobot python=3.10
conda activate lerobot
git clone https://github.com/huggingface/lerobot.git ~/lerobot
conda install ffmpeg=7.1.1 -c conda-forge
cd ~/lerobot && pip install -e ".[feetech]"- A chaque ouverture de Terminal l'environnement python conda est activé, voir au bas du
~/.bashrc - Pour éviter les conflits, on propose d'avoir un fichier
~/.bashrc_condapour conda et un~/.bashrc_rospour ros
Astuces pour activer/désactiver l'environnement conda sans passer par la modification du ~/.bashrc :
- Ne pas activer conda au démarrage :
conda config --set auto_activate_base false - Ne pas configurer le shell pour initialiser conda au démarrage :
conda init --reverse $SHELL
Installation Windows
- Le compte utilisateur doit avoir les droits pour créer des raccourcis (liens symboliques) dans les sous-dossiers de
C:\Users\$USER\lerobot\outputs\train\ - Ils seront utilisés lors de l'entraînement pour créer un lien entre le dossier
lastet le dossier du dernier Checkpoint par ex.100000- Le plus sûr est de travailler avec un compte administrateur
- Il faut peut-être aussi les droits dans le dossier
C:\Users\$USER\.cache\huggingface\lerobot\$HUGGINGFACE_USER
- Installer Miniconda pour Windows : l'environnement de développement Python
- Ouvrir
Anaconda PowerShell Prompt - Créer et activer l'environnement Conda
conda create -y -n lerobot python=3.10
conda activate lerobot
git clone https://github.com/huggingface/lerobot.git ~/lerobot- Installer Pytorch pour la version de Cuda installée sur votre système (testé avec une version Cuda 127 installée et la version cu128 de Pytorch) et autres dépendances nécessaires
cd ~/lerobot
# pip install av poetry-core
conda install ffmpeg=7.1.1 -c conda-forge
pip3 install --pre torch torchvision torchaudio --index-url https://download.pytorch.org/whl/cu128
pip install -e ".[feetech]"Débuguer l'installation si les scripts basculent sur le cpu
S'assurer que Pytorch a été installé, cela installe Cuda :
pip3 install --pre torch torchvision torchaudio --index-url https://download.pytorch.org/whl/cu128
Récupérer les infos système :
python lerobot/scripts/display_sys_info.pypython -m torch.utils.collect_envpython -c "import torch; print(torch.cuda.is_available())" && nvcc -V- cf. https://github.com/huggingface/lerobot/issues/928 > Here for additional information of my full installation.
Créer un compte HuggingFace et se login via un token
- Se créer un compte sur https://huggingface.co/settings/tokens
- Aller dans le menu > Access Tokens
- Récupérer un
TOKENavec des droits en écriture - Ouvrir un Anaconda PowerShell lerobot
(lerobot) PS C:\Users\gauthier.hentz\github\lerobot> - Login avec le Token
huggingface-cli.exe login --token TOKEN
Vous pouvez maintenant uploader et downloaded des DataSets et Modèles vers le Hub HuggingFace pour collaborer avec des experts du Machine Learning.
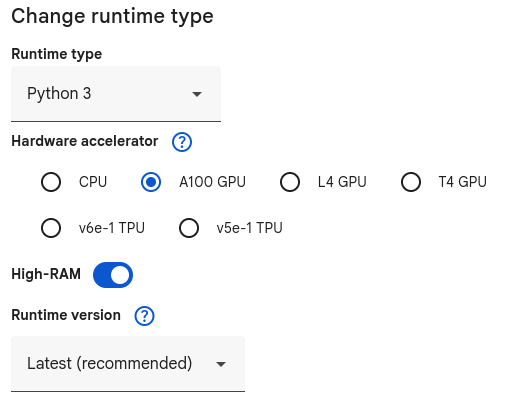
Google Colab
Pour avoir accès à un GPU avec suffisamment de mémoire (16G recommandé et 64G dans l'idéal) on peut utiliser Google Colab
- Avec Tesla T4 (gratuit 5H / mois) on a 15G de RAM qui permet donc un
batch_size=15 - Avec A100 (12€ les 70 crédits) on a 80G de RAM qui permet donc un
batch_size=64
- Ouvrir le Notebook : https://colab.research.google.com/github/huggingface/notebooks/blob/main/lerobot/training-act.ipynb#scrollTo=NQUk3Y0WwYZ4
- Voir aussi https://colab.research.google.com/github/antonilo/real_world_robot_learning_sp25/blob/main/_tutorials/lerobot_tutorial/lerobot_tutorial.ipynb#scrollTo=ff7eafe4
- Change runtime type
- Install conda
- Install LeRobot
- Login avec un jeton d'API Weights & Biases
- Login avec un jeton d'API Hugging Face Hub
- Modifier la commande d'entrainement et l'exécuter :
!cd lerobot && python src/lerobot/scripts/lerobot_train.py \
--dataset.repo_id=gautz/so101_pick_red_18650_drop_black_box_test2_100ep \
--policy.type=act \
--output_dir=outputs/train/act_so101_pick_red_18650_drop_black_box_test2_100ep_64batch \
--job_name=act_so101_pick_red_18650_drop_black_box_test2_100ep_64batch \
--policy.device=cuda \
--policy.push_to_hub=True \
--policy.repo_id=gautz/act_so101_pick_red_18650_drop_black_box_test2_100ep_64batch \
--batch_size=64 \
--wandb.enable=true- Surveiller l'éxecution depuis le runtime ou WanDB
- Ouvrir un Terminal et lancer la commande pour uploader le dernier Checkpoint du modèle :
huggingface-cli upload ${HF_USER}/act_so101_pick_red_18650_drop_black_box_test2_100ep_64batch \ /content/lerobot/outputs/train/act_so101_pick_red_18650_drop_black_box_test2_100ep_64batch/checkpoints/last/pretrained_modelAstuces et Erreurs :
- Si vous utilisez Colab avec un compte gratuit, il faut utiliser l'extension Colab Auto Reconnect pour ne pas être déconnecté au boût de 1H. Il est probable que le runtime soit déconnecté par manque de crédit gratuit avant d'arriver à un checkpoint. Faire des CheckPoint plus souvent, ou passer à un compte payant.
- Si vous utilisez un compte payant, vous ne serez pas déconnecté mais il faut surveiller pour déconnecter le Runtime à la fin de l'entraînement (ou d'un Checkpoint)
- https://github.com/huggingface/lerobot/issues/1532
18 cd /content/
20 cd lerobot/
24 python
25 from huggingface_hub import HfApi
26 hub_api = HfApi()
27 hub_api.create_tag("gautz/so101_pick_red_18650_drop_black_box_test2_100ep", tag="v2.1", repo_type="dataset"
30 cd src/
32 cd lerobot
34 python -m lerobot.datasets.v30.convert_dataset_v21_to_v30 --repo-id=gautz/so101_pick_red_18650_drop_black_box_test2_100epVoir le rapport : https://api.wandb.ai/links/hentz-robotics/wdsr4k2r
Utilisation de LeRobot avec le bash Linux
- Activer l'environnement conda lerobot
cd ~/lerobotconda activate lerobot
lerobot-find-port
A chaque connexion du robot : sudo chmod 666 /dev/ttyACM1
lerobot-find-cameras opencv
lerobot-calibrate --robot.type=so101_follower --robot.port=/dev/ttyACM0 --robot.id=follower_arm_fan1
lerobot-calibrate --teleop.type=so101_leader --teleop.port=/dev/ttyACM1 --teleop.id=leader_arm_fan1
lerobot-teleoperate --robot.type=so101_follower --robot.port=/dev/ttyACM0 --robot.id=follower_arm_fan1 --teleop.type=so101_leader --teleop.port=/dev/ttyACM1 --teleop.id=leader_arm_fan1
lerobot-dataset-viz --repo-id gautz/so101_pick_red_18650_drop_black_box_test2_100ep --episode-index 0
lerobot-record --robot.type=so101_follower --robot.port=/dev/ttyACM0 --robot.id=follower_arm_fan1 --robot.cameras="{ top: {type: opencv, index_or_path: 4, width: 800, height: 600, fps: 20},follower: {type: opencv, index_or_path: 2, width: 800, height: 600, fps: 20}}" --display_data=true --dataset.push_to_hub=False --dataset.repo_id=gautz/eval_act_so101_pick_red_18650_drop_black_box_test2_100ep_64batch_60ksteps --dataset.num_episodes=10 --dataset.single_task="Pick red 18650 battery place black box" --policy.path=gautz/act_so101_pick_red_18650_drop_black_box_test2_100ep_64batch_60ksteps
--resume=true
lerobot-train --dataset.repo_id=gautz/so101_pick_red_18650_drop_black_box_test2_100ep --policy.type=act --output_dir=outputs/train/act_so101_pick_red_18650_drop_black_box_test2_100ep_m620 --job_name=act_so101_pick_red_18650_drop_black_box_test2_100ep_m620 --policy.device=cuda --wandb.enable=false --policy.repo_id=gautz/act_so101_pick_red_18650_drop_black_box_test2_100ep_m620 --batch_size=2
nano lerobot/common/robot_devices/robots/configs.py
python lerobot/scripts/control_robot.py --robot.type=so101 --robot.cameras='{}' --control.type=teleoperate
lerobot-record --robot.type=so101_follower --robot.port=/dev/ttyACM0 --robot.id=follower_arm_fan1 --robot.cameras="{ top: {type: opencv, index_or_path: 0, width: 800, height: 600, fps: 20},follower: {type: opencv, index_or_path: 2, width: 800, height: 600, fps: 20}}" --dataset.push_to_hub=False --dataset.repo_id=gautz/eval_act_so101_pick_battery_place_ifixit_test1_50ep_rtx507016_chkpt100kter --dataset.num_episodes=10 --dataset.single_task="Eval Pick battery place ifixit" --policy.path=outputs/train/act_so101_pick_battery_place_ifixit_test1_50ep_rtx507016/checkpoints/100000/pretrained_model --display_data=false
Server inference
pip install 'lerobot[feetech,async]'
python -m lerobot.async_inference.robot_client --server_address=127.0.0.1:8080 --robot.type=so101_follower --robot.port=/dev/ttyACM0 --robot.id=follower_arm_fan1 --robot.cameras="{ top: {type: opencv, index_or_path: 0, width: 800, height: 600, fps: 20},follower: {type: opencv, index_or_path: 2, width: 800, height: 600, fps: 20}}" --task="Eval Pick battery place ifixit" --policy_type=act --pretrained_name_or_path=gautz/act_so101_pick_battery_place_ifixit_test1_50ep_rtx507016_chkpt100000 --policy_device=cuda --actions_per_chunk=50 --chunk_size_threshold=0.5 --aggregate_fn_name=weighted_average --debug_visualize_queue_size=True
Calibration robot et configuration caméras
python -m lerobot.calibrate --teleop.type=so101_leader --teleop.port=/dev/ttyACM0 --teleop.id=leader_arm_fan1
python -m lerobot.calibrate --robot.type=so101_follower --robot.port=/dev/ttyUSB0 --robot.id=follower_arm_fan1
Téléopération
python -m lerobot.teleoperate \
--robot.type=so101_follower \
--robot.port=/dev/ttyUSB0 \
--robot.id=follower_arm_fan1 \
--robot.cameras="{ top: {type: opencv, index_or_path: 2, width: 640, height: 480, fps: 30},follower: {type: opencv, index_or_path: 4, width: 640, height: 480, fps: 30}}" \
--teleop.type=so101_leader \
--teleop.port=/dev/ttyACM0 \
--teleop.id=leader_arm_fan1 \
--display_data=trueRejouer dataset en local :
python -m lerobot.replay \
--robot.type=so101_follower \
--robot.port=/dev/ttyUSB0 \
--robot.id=follower_arm_fan1 \
--dataset.repo_id=gautz/18650-test1-10ep \
--dataset.episode=0 # choose the episode you want to replayMachine Learning
Enregistrer dataset en local :
python -m lerobot.record \
--robot.type=so101_follower \
--robot.port=/dev/ttyUSB0 \
--robot.id=follower_arm_fan1 \
--robot.cameras="{ top: {type: opencv, index_or_path: 2, width: 640, height: 480, fps: 30},follower: {type: opencv, index_or_path: 4, width: 640, height: 480, fps: 30}}" \
--teleop.type=so101_leader \
--teleop.port=/dev/ttyACM0 \
--teleop.id=leader_arm_fan1 \
--display_data=true \
--dataset.repo_id=gautz/18650-test1-10ep \
--dataset.episode_time_s=10 \
--dataset.reset_time_s=10 \
--dataset.num_episodes=10 \
--dataset.single_task="Pick red 18650 battery place black box" \
--dataset.push_to_hub=FalseEntrainer en local avec le CPU
python lerobot/scripts/train.py \
--dataset.repo_id=gautz/18650-test1-10ep \
--policy.type=act \
--output_dir=outputs/train/act_so101_18650-test1-10ep \
--job_name=act_so101_18650-test1-10ep \
--policy.device=cpu # \
--wandb.enable=false # trueEntrainer en local avec le GPU NVidia
python lerobot/scripts/train.py \
--dataset.repo_id=gautz/18650-test1-10ep \
--policy.type=act \
--output_dir=outputs/train/act_so101_18650-test1-10ep \
--job_name=act_so101_18650-test1-10ep \
--policy.device=cuda \
--wandb.enable=falseEnregistrer un dataset d'évaluation d'un modèle à un checkpoint donné :
python -m lerobot.record \
--robot.type=so101_follower \
--robot.port=/dev/ttyUSB0 \
--robot.cameras="{ top: {type: opencv, index_or_path: 2, width: 800, height: 600, fps: 30},follower: {type: opencv, index_or_path: 4, width: 800, height: 600, fps: 30}}" \
--robot.id=follower_arm_fan1 \
--display_data=false \
--dataset.repo_id=gautz/eval_act_18650-test2-100ep \
--dataset.single_task="Pick red 18650 battery place black box" \
--policy.path=outputs/train/act_so101_18650-test2-100ep/checkpoints/last/pretrained_model \
--dataset.push_to_hub=FalseUtilisation de LeRobot avec Anaconda Powershell Prompt
Calibration des robots
python -m lerobot.setup_motors --robot.type=so101_follower --robot.port=COM13python -m lerobot.setup_motors --robot.type=so101_leader --robot.port=COM14
Machine Learning
Collecte de données :
Uploader les données vers le Hub HuggingFace :
https://huggingface.co/docs/lerobot/en/il_robots#dataset-upload
huggingface-cli.exe upload gautz/so101_pick_red_18650_drop_black_box_test2_100ep ..\.cache\huggingface\lerobot\gautz\18650-test2-100ep\ --repo-type dataset
Entrainer un modèle sur un Dataset (sur IHA-QLIOVR-1, compte admin) :
cd ..\gauthier.hentz\lerobot\
conda activate lerobot
cd .\lerobot\
conda create -y -n lerobot python=3.10
conda activate lerobot
conda install ffmpeg -c conda-forge
ffmpeg -encoders
conda install ffmpeg=7.1.1 -c conda-forge
pip install av poetry-core
pip3 install --pre torch torchvision torchaudio --index-url https://download.pytorch.org/whl/cu128
pip install -e .
python lerobot/scripts/train.py --dataset.repo_id=gautz/18650-test2-100ep --policy.type=act --output_dir=outputs/train/act_so101_18650-test2-100ep --job_name=act_so101_18650-test2-100ep --policy.device=cuda --wandb.enable=false
Enregistrer un dataset d'évaluation d'un modèle à un checkpoint donné :
python -m lerobot.record --robot.type=so101_follower --robot.port=/dev/ttyUSB0 --robot.cameras="{ top: {type: opencv, index_or_path: 2, width: 800, height: 600, fps: 30},follower: {type: opencv, index_or_path: 4, width: 800, height: 600, fps: 30}}" --robot.id=follower_arm_fan1 --display_data=false --dataset.repo_id=gautz/eval_act_18650-test2-100ep --dataset.single_task="Pick red 18650 battery place black box" --policy.path=outputs/train/act_so101_18650-test2-100ep/checkpoints/last/pretrained_model --dataset.push_to_hub=False
Uploader un modèle vers HuggingFace
https://github.com/huggingface/lerobot/?tab=readme-ov-file#add-a-pretrained-policy
- Rechercher le dossier du Checkpoint voulu, par ex.
C:\Users\User\github\lerobot\outputs\train\act_so101_18650-test2-100ep\checkpoints\100000 - Définir le User HuggingFace (qui doit être Login via un Token)
gautzet le Repoact_so101_pick_red_18650_drop_black_box_test2_100ep_100000, puis uploader le Checkpoint :huggingface-cli.exe upload gautz/act_so101_pick_red_18650_drop_black_box_test2_100ep_100000 .\outputs\train\act_so101_18650-test2-100ep\checkpoints\100000
Historique du Terminal complet
wget "https://repo.anaconda.com/miniconda/Miniconda3-latest-Windows-x86_64.exe" -outfile ".\Downloads\Miniconda3-latest-Windows-x86_64.exe"
cd .\github\lerobot\
conda create -y -n lerobot python=3.10
conda activate lerobot
conda install ffmpeg -c conda-forge
conda install ffmpeg=7.1.1 -c conda-forge
wsl --shutdown
pip install -e .
pip install -e ".[feetech]" # or "[dynamixel]" for example
python lerobot/find_port.py
python lerobot/find_cameras.py opencv
python -m lerobot.setup_motors --robot.type=so101_follower --robot.port=COM13`
python -m lerobot.record --robot.type=so101_follower --robot.port=COM13 --robot.cameras="{ top: {type: opencv, index_or_path: 2, width: 800, height: 600, fps: 30},follower: {type: opencv, index_or_path: 4, width: 800, height: 600, fps: 30}}" --robot.id=follower_arm_fan1 --display_data=false --dataset.repo_id=gautz/eval_act_18650-test2-100ep --dataset.single_task="Pick red 18650 battery place black box" --policy.path=outputs/train/act_so101_18650-test2-100ep/checkpoints/last/pretrained_model --dataset.push_to_hub=False
python -m lerobot.calibrate --teleop.type=so101_leader --teleop.port=COM14 --teleop.id=leader_arm_fan1`
python -m lerobot.calibrate --robot.type=so101_follower --robot.port=COM13 --robot.id=follower_arm_fan1
python -m lerobot.teleoperate --robot.type=so101_follower --robot.port=COM13 --robot.id=follower_arm_fan1 --robot.cameras="{ top: {type: opencv, index_or_path: 1, width: 640, height: 480, fps: 30},follower: {type: opencv, index_or_path: 2, width: 640, height: 480, fps: 30}}" --teleop.type=so101_leader --teleop.port=COM14 --teleop.id=leader_arm_fan1 --display_data=true
python lerobot/find_cameras.py opencv
python -m lerobot.teleoperate --robot.type=so101_follower --robot.port=COM13 --robot.id=follower_arm_fan1 --robot.cameras="{ top: {type: opencv, index_or_path: 1, width: 800, height: 600, fps: 30},follower: {type: opencv, index_or_path: 2, width: 800, height: 600, fps: 30}}" --teleop.type=so101_leader --teleop.port=COM14 --teleop.id=leader_arm_fan1 --display_data=true
pip install -e .
python lerobot/find_cameras.py opencv
python -m lerobot.teleoperate --robot.type=so101_follower --robot.port=COM13 --robot.id=follower_arm_fan1 --robot.cameras="{ top: {type: opencv, index_or_path: 1, width: 800, height: 600, fps: 30},follower: {type: opencv, index_or_path: 0, width: 800, height: 600, fps: 30}}" --teleop.type=so101_leader --teleop.port=COM14 --teleop.id=leader_arm_fan1 --display_data=true
python -m lerobot.record --robot.type=so101_follower --robot.port=COM13 --robot.cameras="{ top: {type: opencv, index_or_path: 1, width: 800, height: 600, fps: 30},follower: {type: opencv, index_or_path: 0, width: 800, height: 600, fps: 30}}" --robot.id=follower_arm_fan1 --display_data=false --dataset.repo_id=gautz/eval_act_18650-test2-100ep --dataset.single_task="Pick red 18650 battery place black box" --policy.path=outputs/train/act_so101_18650-test2-100ep/checkpoints/last/pretrained_model --dataset.push_to_hub=False
python lerobot/scripts/display_sys_info.py
python -m torch.utils.collect_env
python -c "import torch; print(torch.cuda.is_available())" && nvcc -V
python -c "import torch; print(torch.cuda.is_available())"
pip3 install --pre torch torchvision torchaudio --index-url https://download.pytorch.org/whl/cu128
python -m lerobot.record --robot.type=so101_follower --robot.port=COM13 --robot.cameras="{ top: {type: opencv, index_or_path: 1, width: 800, height: 600, fps: 30},follower: {type: opencv, index_or_path: 0, width: 800, height: 600, fps: 30}}" --robot.id=follower_arm_fan1 --display_data=false --dataset.repo_id=gautz/eval_act_18650-test2-100ep --dataset.single_task="Pick red 18650 battery place black box" --policy.path=outputs/train/act_so101_18650-test2-100ep/checkpoints/last/pretrained_model --dataset.push_to_hub=False --wandb.enable=false
python -m lerobot.record --robot.type=so101_follower --robot.port=COM13 --robot.cameras="{ top: {type: opencv, index_or_path: 1, width: 800, height: 600, fps: 30},follower: {type: opencv, index_or_path: 0, width: 800, height: 600, fps: 30}}" --robot.id=follower_arm_fan1 --display_data=false --dataset.repo_id=gautz/eval_act_18650-test2-100ep --dataset.single_task="Pick red 18650 battery place black box" --policy.path=outputs/train/act_so101_18650-test2-100ep/checkpoints/last/pretrained_model --dataset.push_to_hub=False --dataset.episode_time_s=10 --dataset.reset_time_s=10 --dataset.num_episodes=10
exit
cd .\github\lerobot\
conda activate lerobot
python -m lerobot.record --robot.type=so101_follower --robot.port=COM13 --robot.cameras="{ top: {type: opencv, index_or_path: 1, width: 800, height: 600, fps: 30},follower: {type: opencv, index_or_path: 0, width: 800, height: 600, fps: 30}}" --robot.id=follower_arm_fan1 --display_data=false --dataset.repo_id=gautz/eval_act_18650-test2-100ep --dataset.single_task="Pick red 18650 battery place black box" --policy.path=outputs/train/act_so101_18650-test2-100ep/checkpoints/last/pretrained_model --dataset.push_to_hub=False --dataset.episode_time_s=15 --dataset.reset_time_s=10 --dataset.num_episodes=10
python -m lerobot.teleoperate --robot.type=so101_follower --robot.port=COM13 --robot.id=follower_arm_fan1 --robot.cameras="{ top: {type: opencv, index_or_path: 1, width: 800, height: 600, fps: 30},follower: {type: opencv, index_or_path: 0, width: 800, height: 600, fps: 30}}" --teleop.type=so101_leader --teleop.port=COM14 --teleop.id=leader_arm_fan1 --display_data=true
exit
cd .\github\lerobot\
conda activate lerobot
python -m lerobot.teleoperate --robot.type=so101_follower --robot.port=COM13 --robot.id=follower_arm_fan1 --robot.cameras="{ top: {type: opencv, index_or_path: 1, width: 800, height: 600, fps: 30},follower: {type: opencv, index_or_path: 0, width: 800, height: 600, fps: 30}}" --teleop.type=so101_leader --teleop.port=COM14 --teleop.id=leader_arm_fan1 --display_data=true
python lerobot/find_port.py
python -m lerobot.teleoperate --robot.type=so101_follower --robot.port=COM15 --robot.id=follower_arm_fan1 --robot.cameras="{ top: {type: opencv, index_or_path: 1, width: 800, height: 600, fps: 30},follower: {type: opencv, index_or_path: 0, width: 800, height: 600, fps: 30}}" --teleop.type=so101_leader --teleop.port=COM14 --teleop.id=leader_arm_fan1 --display_data=true
python lerobot/find_cameras.py opencv
python -m lerobot.teleoperate --robot.type=so101_follower --robot.port=COM15 --robot.id=follower_arm_fan1 --robot.cameras="{ top: {type: opencv, index_or_path: 0, width: 800, height: 600, fps: 30},follower: {type: opencv, index_or_path: 2, width: 800, height: 600, fps: 30}}" --teleop.type=so101_leader --teleop.port=COM14 --teleop.id=leader_arm_fan1 --display_data=true
python -m lerobot.record --robot.type=so101_follower --robot.port=COM15 --robot.cameras="{ top: {type: opencv, index_or_path: 1, width: 800, height: 600, fps: 30},follower: {type: opencv, index_or_path: 0, width: 800, height: 600, fps: 30}}" --robot.id=follower_arm_fan1 --display_data=false --dataset.repo_id=gautz/eval_act_18650-test2-100ep --dataset.single_task="Pick red 18650 battery place black box" --policy.path=outputs/train/act_so101_18650-test2-100ep/checkpoints/last/pretrained_model --dataset.push_to_hub=False --dataset.episode_time_s=15 --dataset.reset_time_s=10 --dataset.num_episodes=10
python -m lerobot.record --robot.type=so101_follower --robot.port=COM15 --robot.cameras="{ top: {type: opencv, index_or_path: 0, width: 800, height: 600, fps: 30},follower: {type: opencv, index_or_path: 2, width: 800, height: 600, fps: 30}}" --robot.id=follower_arm_fan1 --display_data=false --dataset.repo_id=gautz/eval_act_18650-test2-100ep --dataset.single_task="Pick red 18650 battery place black box" --policy.path=outputs/train/act_so101_18650-test2-100ep/checkpoints/last/pretrained_model --dataset.push_to_hub=False --dataset.episode_time_s=15 --dataset.reset_time_s=10 --dataset.num_episodes=10
python -m lerobot.teleoperate --robot.type=so101_follower --robot.port=COM15 --robot.id=follower_arm_fan1 --robot.cameras="{ top: {type: opencv, index_or_path: 0, width: 800, height: 600, fps: 30},follower: {type: opencv, index_or_path: 2, width: 800, height: 600, fps: 30}}" --teleop.type=so101_leader --teleop.port=COM14 --teleop.id=leader_arm_fan1 --display_data=true
cd .\github\lerobot\
cd ..
cd .\.cache\
cd .\huggingface\ls
cd .\huggingface\lerobot\calibration\cd ..
cd .\huggingface\lerobot\
cd .\gautz\
cd ..
cd .\github\lerobot\
cd .\outputs\train\
cd .\act_so101_18650-test2-100ep\
cd .\checkpoints\Migration dataset v2.1 to v3
https://github.com/huggingface/lerobot/blob/main/docs/source/lerobot-dataset-v3.mdx#migrate-v21--v30
Sources
https://wiki.seeedstudio.com/lerobot_so100m/
https://huggingface.co/blog/sherryxychen/train-act-on-so-101
https://github.com/sherrychen1120/so101_bench
Démo AICA YOLO Portes Ouvertes 2026
Mise en place
Après avoir récupéré le robot UR5e et l'armoire à roulettes qui contient le PC AICA :
- Brancher l’alimentation du robot UR5e et du PC AICA
- La webcam et le dongle Wifi sont branchés en USB sur le PC
- On a une paire de ciseau ou autre
- Le câble Ethernet relie le PC AICA et le contrôleur de l’UR5e
- On démarre le PC et le robot.
- Adresse IP de l’UR5e : 192.168.0.10
Sur le teach panel du robot :
- Pour connaître l’adresse IP du robot : Cliquer sur les 3 petits points en haut à droite, puis À propos
- Cliquer en bas à gauche sur le bouton rouge
- Cliquer deux fois sur On pour allumer le robot puis quitter
- Basculer en haut à droite sur le mode Remote Control
- Le robot est prêt pour être commandé par AICA
- Pour la sécurité lors du pilotage par AICA : Une personne tient le teach panel et reste prêt à déclencher le bouton d’arrêt
Sur le PC AICA :
- Adresse IP de l’ordinateur : 192.168.0.1
- On se connecte à Ubuntu à l’aide du compte étudiant.
MDP :
Ensuite, on se connecte au Wifi Osiris (ouvert)
On ouvre le navigateur et on se connecte avec les identifiants Unistra ou Portes ouvertes :
Login : Conf-jpoiha
MDP : demander à M. Le Normand. - Ouvrir l’explorateur de fichiers et cliquer sur le raccourci « aica launcher »
Dans le dossier /home/etudiant/aica/aica-launcher.../ on lance l’exécutable AICA Launcher - Sélectionner la configuration GPU et Cliquer sur « launcher AICA Studio »
- On se retrouve sur la page d’identification de AICA Studio
- Cliquer sur Login, à droite de tp1@unistra.fr
- Le MDP du compte tp1@unistra.fr est dans le fichier /home/etudiant/aica/mdp.txt.
- Sélectionner le Programme yolo
- OU créer un nouveau programme en y copiant le code ci-dessous puis cliquer sur Generate Program
- Cliquer sur Start
- Accès à RViz depuis le menu launcher en haut à droite
- Dans RViz, une fois que le programme YOLO est Start,
- cliquer en bas à gauche sur Add, puis by topic, puis tout en bas sur yolo > annotated_image > image
- On visualise ainsi l’image annotée de YOLO
- Dans RViz afficher le collision box marker, cf. https://docs.aica.tech/core/examples/core-components/colliders#box-collider-example
Déroulement de la démo
- On prend une paire de ciseaux
- Quand ils sont au centre ou hors de l’image, le robot s’arrête
- Quand ils sont au Nord, Sud, Est, Ouest de l’image, l’UR5e se déplace dans les 4 directions du plan X,Y
Ce qu'on peut montrer en plus :
- Dans le bloc Bounding Box tracker adapter les gains de commande du robot pour qu’il aille plus ou moins vite
- Dans le bloc Yolo, on peut changer le type d'objet à suivre en remplaçant
scissorspar une des classes traitées par Yolo, par exemple unsandwich, unebottleou uneapplecf. https://gist.github.com/rcland12/dc48e1963268ff98c8b2c4543e7a9be8 - Contraindre le mouvement dans une Collision Box, cf. code ci-dessous
- Piloter le robot via un Point Attractor et contraindre son mouvement dans une Collision Box, cf. code ci-dessous
Ranger la démo
- Passer le teahc panel en mode manuel et remettre le robot dans sa position de repos
- Cliquer en bas à gauche sur le bouton vert puis stopper le contrôleur
- Cliquer en haut à droite sur les trois points puis arrêter le robot
- Quitter AICA Studio en cliquant en haut à droite sur Launcher > Force Stop
- Fermer la fenêtre
- Eteindre le PC
- Débrancher PC et UR5e
- voir la section mise-en-place à l'envers
Si le programme AICA ne veut plus se stopper :
- Cliquer en haut sur hardware puis revenir sur programme
- Si ça ne fonctionne toujours pas, relancer le launcher en cliquant en haut à droite sur le menu Launcher, Force Stop puis redémarrer AICA Studio.
Programme YOLO avec UR5e
vérifier l'adresse IP du robot
schema: 2-0-6
dependencies:
core: v5.1.0
on_start:
load:
- hardware: hardware
- component: camera_streamer
components:
yolo_executor:
component: advanced_perception::object_detection::YoloExecutor
display_name: YOLO Executor
events:
transitions:
on_load:
lifecycle:
component: yolo_executor
transition: configure
on_configure:
lifecycle:
component: yolo_executor
transition: activate
on_activate:
load:
component: bounding_box_tracker
parameters:
model_file:
value: /yolo-example-data/yolo12n.onnx
type: string
classes_file:
value: /yolo-example-data/coco.yaml
type: string
object_class:
value:
- scissors
type: string_array
conf_threshold:
value: 0.4
type: double
num_threads:
value: 2
type: int
inputs:
image: /camera_streamer/image
outputs:
detections: /yolo_executor/detections
camera_streamer:
component: core_vision_components::image_streaming::CameraStreamer
display_name: Camera Streamer
events:
transitions:
on_load:
lifecycle:
component: camera_streamer
transition: configure
on_configure:
lifecycle:
component: camera_streamer
transition: activate
on_activate:
load:
component: yolo_executor
parameters:
camera_frame:
value: tool0
type: string
outputs:
image: /camera_streamer/image
bounding_box_tracker:
component: object_detection_utils::BoundingBoxTracker
display_name: Bounding box tracker
events:
transitions:
on_load:
lifecycle:
component: bounding_box_tracker
transition: configure
on_configure:
lifecycle:
component: bounding_box_tracker
transition: activate
parameters:
rate:
value: 500
type: double
inputs:
detections: /yolo_executor/detections
outputs:
twist: /yolo_to_marker/twist
hardware:
hardware:
display_name: Hardware Interface
urdf: Universal Robots 5e
rate: 500
events:
transitions:
on_load:
load:
- controller: robot_state_broadcaster
hardware: hardware
- controller: joint_trajectory_controller
hardware: hardware
- controller: ur_dashboard_controller
hardware: hardware
- controller: ik_velocity_controller
hardware: hardware
parameters:
headless_mode: "true"
robot_ip: 192.168.0.10
script_filename: /ws/install/ur_client_library/share/ur_client_library/resources/external_control.urscript
controllers:
robot_state_broadcaster:
plugin: aica_core_controllers/RobotStateBroadcaster
events:
transitions:
on_load:
switch_controllers:
hardware: hardware
activate: robot_state_broadcaster
joint_trajectory_controller:
plugin: aica_core_controllers/trajectory/JointTrajectoryController
events:
predicates:
has_trajectory_succeeded:
call_service:
controller: ur_dashboard_controller
hardware: hardware
service: hand_back_control
transitions:
on_activate:
sequence:
start: sequence
ur_dashboard_controller:
plugin: aica_ur_controllers/URDashboardController
events:
predicates:
program_running:
switch_controllers:
hardware: hardware
activate: joint_trajectory_controller
hand_back_control_success:
application: stop
transitions:
on_load:
switch_controllers:
hardware: hardware
activate: ur_dashboard_controller
ik_velocity_controller:
plugin: aica_core_controllers/velocity/IKVelocityController
inputs:
command: /yolo_to_marker/twist
events:
transitions:
on_load:
switch_controllers:
hardware: hardware
activate: ik_velocity_controller
graph:
positions:
on_start:
x: -20
y: -360
stop:
x: -20
y: -260
components:
yolo_executor:
x: 740
y: -180
camera_streamer:
x: 200
y: -300
bounding_box_tracker:
x: 1400
y: 180
hardware:
hardware:
x: 1940
y: -360
edges:
yolo_to_marker_marker_pose_signal_point_attractor_attractor:
path:
- x: 1360
y: 520
- x: 1360
y: 680
yolo_executor_detections_yolo_to_marker_json_input:
path:
- x: 1160
y: 120
- x: 1160
y: 220
- x: 860
y: 220
- x: 860
y: 520
yolo_to_marker_twist_hardware_hardware_ik_velocity_controller_command:
path:
- x: 1820
y: 380
- x: 1820
y: 420
yolo_executor_detections_yolo_to_marker_detections:
path:
- x: 1200
y: 120
- x: 1200
y: 380
on_start_on_start_camera_streamer_camera_streamer:
path:
- x: 140
y: -300
- x: 140
y: -240
yolo_executor_on_activate_bounding_box_tracker_bounding_box_tracker:
path:
- x: 1300
y: 0
- x: 1300
y: 240
hardware_hardware_joint_trajectory_controller_has_trajectory_succeeded_hardware_hardware_ur_dashboard_controller_hand_back_control:
path:
- x: 1920
y: 400
- x: 1920
y: 900
hardware_hardware_ur_dashboard_controller_program_running_hardware_hardware_joint_trajectory_controller:
path:
- x: 1920
y: 820
- x: 1920
y: 240
hardware_hardware_ur_dashboard_controller_hand_back_control_success_on_stop_on_stop:
path:
- x: -40
y: 780
- x: -40
y: -200
camera_streamer_image_yolo_executor_image:
path:
- x: 640
y: -40
- x: 640
y: 120
yolo_executor_detections_bounding_box_tracker_detections:
path:
- x: 1220
y: 120
- x: 1220
y: 400
bounding_box_tracker_twist_hardware_hardware_ik_velocity_controller_command:
path:
- x: 1860
y: 400
- x: 1860
y: 1120
Programme UR5e avec YOLO et Bounding Box
- Dans RViz afficher le collision box marker, cf. https://docs.aica.tech/core/examples/core-components/colliders#box-collider-example
schema: 2-0-6
dependencies:
core: v4.0.0
frames:
start:
reference_frame: world
position:
x: 0.016268
y: 0.460877
z: 0.574409
orientation:
w: 0.000502
x: 0.999979
y: -0.005594
z: -0.003165
on_start:
load:
- component: frame_broadcaster
- hardware: hardware
sequence:
start: sequence
sequences:
sequence:
display_name: Sequence
steps:
- check:
condition:
controller: joint_trajectory_controller
hardware: hardware
predicate: has_trajectory_succeeded
wait_forever: true
- call_service:
controller: ur_dashboard_controller
hardware: hardware
service: zero_ftsensor
- check:
condition:
controller: ur_dashboard_controller
hardware: hardware
predicate: zero_ftsensor_success
wait_forever: true
- switch_controllers:
hardware: hardware
deactivate: joint_trajectory_controller
components:
frame_broadcaster:
component: aica_core_components::ros::StaticFrameBroadcaster
display_name: Frame Broadcaster
parameters:
frame:
value: camera_link
type: string
reference_frame:
value: ur_tool0
type: string
pose_values:
value:
- -0.02
- -0.11752
- 0.032
- 1
- 0
- 0
- 0
type: double_array
broadcast_periodically:
value: true
type: bool
yolo_executor:
component: advanced_perception::object_detection::YoloExecutor
display_name: YOLO Executor
events:
transitions:
on_load:
lifecycle:
component: yolo_executor
transition: configure
on_configure:
lifecycle:
component: yolo_executor
transition: activate
on_activate:
load:
component: bounding_box_tracker
parameters:
rate:
value: 30
type: double
model_file:
value: /data/models/yolo12n.onnx
type: string
classes_file:
value: /data/models/coco.yaml
type: string
object_class:
value:
- scissors
type: string_array
conf_threshold:
value: 0.4
type: double
inputs:
image: /camera_streamer/image
outputs:
detections: /yolo_executor/detections
bounding_box_tracker:
component: object_detection_utils::BoundingBoxTracker
display_name: Bounding box tracker
events:
transitions:
on_load:
lifecycle:
component: bounding_box_tracker
transition: configure
on_configure:
lifecycle:
component: bounding_box_tracker
transition: activate
parameters:
rate:
value: 100
type: double
gains:
value:
- 0.008
- 0.008
type: double_array
decay_rate:
value: 8
type: double
reference_frame:
value: world
type: string
inputs:
detections: /yolo_executor/detections
outputs:
twist: /bounding_box_tracker/twist
box_collider:
component: aica_core_components::utility::BoxCollider
display_name: Box Collider
events:
predicates:
is_out_of_bounds:
set:
parameter: gains
value:
- 0
- 0
type: double_array
component: bounding_box_tracker
is_in_bounds:
set:
parameter: gains
value:
- 0.008
- 0.008
type: double_array
component: bounding_box_tracker
transitions:
on_load:
lifecycle:
component: box_collider
transition: configure
on_configure:
lifecycle:
component: box_collider
transition: activate
parameters:
x_size:
value: 0.8
type: double
y_size:
value: 0.3
type: double
z_size:
value: 0.5
type: double
inputs:
target: /hardware/robot_state_broadcaster/cartesian_state
center: /frame_to_signal/pose
frame_to_signal:
component: aica_core_components::ros::TfToSignal
display_name: Frame to Signal
events:
transitions:
on_load:
lifecycle:
component: frame_to_signal
transition: configure
on_configure:
lifecycle:
component: frame_to_signal
transition: activate
on_activate:
load:
component: box_collider
parameters:
frame:
value: start
type: string
outputs:
pose: /frame_to_signal/pose
camera_streamer:
component: core_vision_components::image_streaming::CameraStreamer
display_name: Camera Streamer
events:
transitions:
on_load:
load:
- component: yolo_executor
- component: frame_to_signal
lifecycle:
component: camera_streamer
transition: configure
on_configure:
lifecycle:
component: camera_streamer
transition: activate
outputs:
image: /camera_streamer/image
hardware:
hardware:
display_name: Hardware Interface
urdf: Universal Robots 5e
rate: 500
events:
transitions:
on_load:
load:
- controller: robot_state_broadcaster
hardware: hardware
- controller: joint_trajectory_controller
hardware: hardware
- controller: ur_impedance_controller
hardware: hardware
- controller: ur_dashboard_controller
hardware: hardware
parameters:
robot_ip: 192.168.56.101
controllers:
ur_dashboard_controller:
plugin: aica_ur_controllers/URDashboardController
events:
transitions:
on_load:
switch_controllers:
hardware: hardware
activate: ur_dashboard_controller
joint_trajectory_controller:
plugin: aica_core_controllers/trajectory/JointTrajectoryController
events:
transitions:
on_load:
switch_controllers:
hardware: hardware
activate: joint_trajectory_controller
on_deactivate:
load:
component: camera_streamer
switch_controllers:
hardware: hardware
activate: ur_impedance_controller
on_activate:
call_service:
controller: joint_trajectory_controller
hardware: hardware
service: set_trajectory
payload: |-
frames:
- start
durations:
- 2.0
robot_state_broadcaster:
plugin: aica_core_controllers/RobotStateBroadcaster
outputs:
cartesian_state: /hardware/robot_state_broadcaster/cartesian_state
ft_sensor: /hardware/robot_state_broadcaster/ft_sensor
events:
transitions:
on_load:
switch_controllers:
hardware: hardware
activate: robot_state_broadcaster
ur_impedance_controller:
plugin: aica_ur_controllers/URImpedanceController
parameters:
selection_vector:
value:
- 1
- 1
- 1
- 0
- 0
- 1
type: int_array
force_limit:
value:
- 40
- 40
- 40
- 30
- 30
- 30
type: vector
stiffness:
value:
- 500
- 500
- 500
- 400
- 400
- 400
type: vector
damping:
value:
- 50
- 50
- 50
- 10
- 10
- 10
type: vector
inputs:
command: /bounding_box_tracker/twist
graph:
positions:
on_start:
x: -740
y: -360
stop:
x: -740
y: -260
components:
frame_broadcaster:
x: -420
y: -580
yolo_executor:
x: 760
y: 480
bounding_box_tracker:
x: 1300
y: 600
box_collider:
x: 840
y: 1020
frame_to_signal:
x: 280
y: 1140
camera_streamer:
x: 180
y: 520
hardware:
hardware:
x: 1880
y: -360
sequences:
sequence:
x: -420
y: -280
edges:
yolo_to_marker_marker_pose_signal_point_attractor_attractor:
path:
- x: 1360
y: 520
- x: 1360
y: 680
yolo_executor_detections_yolo_to_marker_json_input:
path:
- x: 1160
y: 120
- x: 1160
y: 220
- x: 860
y: 220
- x: 860
y: 520
yolo_to_marker_twist_hardware_hardware_ik_velocity_controller_command:
path:
- x: 1740
y: 680
- x: 1740
y: 920
yolo_to_marker_twist_hardware_hardware_velocity_impedance_controller_command:
path:
- x: 1740
y: 680
- x: 1740
y: 920
hardware_hardware_robot_state_broadcaster_ft_sensor_hardware_hardware_velocity_impedance_controller_ft_sensor:
path:
- x: 1840
y: 700
- x: 1840
y: 960
hardware_hardware_ur_dashboard_controller_zero_ftsensor_success_sequence_sequence_condition_input_2:
path:
- x: -60
y: 80
yolo_to_marker_on_activate_hardware_hardware_ur_impedance_controller:
path:
- x: 1840
y: 700
- x: 1840
y: 1060
yolo_to_marker_twist_hardware_hardware_ur_impedance_controller_command:
path:
- x: 1740
y: 780
- x: 1740
y: 1220
orbbec_camera_on_load_yolo_executor_yolo_executor:
path:
- x: 680
y: 620
- x: 680
y: 540
orbbec_camera_on_load_frame_to_signal_frame_to_signal:
path:
- x: 680
y: 620
- x: 680
y: 1020
- x: 240
y: 1020
- x: 240
y: 1200
orbbec_camera_color_image_yolo_executor_image:
path:
- x: 640
y: 700
- x: 640
y: 780
on_start_on_start_frame_broadcaster_frame_broadcaster:
path:
- x: -540
y: -300
- x: -540
y: -520
on_start_on_start_sequence_sequence:
path:
- x: -540
y: -300
- x: -540
y: -220
hardware_joint_trajectory_controller_has_trajectory_succeeded_condition_sequence_sequence_condition_input_0:
path:
- x: -380
y: 440
sequence_sequence_event_trigger_1_hardware_hardware_ur_dashboard_controller_zero_ftsensor:
path:
- x: -220
y: 140
hardware_ur_dashboard_controller_zero_ftsensor_success_condition_sequence_sequence_condition_input_2:
path:
- x: -60
y: 60
sequence_sequence_event_trigger_3_hardware_hardware_joint_trajectory_controller:
path:
- x: 100
y: 200
box_collider_is_out_of_bounds_bounding_box_tracker_bounding_box_tracker:
path:
- x: 1400
y: 1280
- x: 1400
y: 1000
- x: 1280
y: 1000
- x: 1280
y: 660
box_collider_is_in_bounds_bounding_box_tracker_bounding_box_tracker:
path:
- x: 1360
y: 1240
- x: 1360
y: 1040
- x: 1260
y: 1040
- x: 1260
y: 660
frame_to_signal_on_activate_box_collider_box_collider:
path:
- x: 800
y: 1320
- x: 800
y: 1080
camera_streamer_on_load_yolo_executor_yolo_executor:
path:
- x: 620
y: 700
- x: 620
y: 540
camera_streamer_on_load_frame_to_signal_frame_to_signal:
path:
- x: 620
y: 700
- x: 620
y: 1060
- x: 260
y: 1060
- x: 260
y: 1200
hardware_hardware_joint_trajectory_controller_on_deactivate_camera_streamer_camera_streamer:
path:
- x: 100
y: 360
- x: 100
y: 580
hardware_hardware_joint_trajectory_controller_on_deactivate_hardware_hardware_ur_impedance_controller:
path:
- x: 1820
y: 360
- x: 1820
y: 1040
hardware_hardware_joint_trajectory_controller_on_activate_hardware_hardware_joint_trajectory_controller_set_trajectory:
path:
- x: 1800
y: 320
- x: 1800
y: 520
yolo_executor_detections_bounding_box_tracker_detections:
path:
- x: 1240
y: 780
- x: 1240
y: 820
bounding_box_tracker_twist_hardware_hardware_ur_impedance_controller_command:
path:
- x: 1760
y: 820
- x: 1760
y: 1200
hardware_hardware_robot_state_broadcaster_cartesian_state_box_collider_target:
path:
- x: 740
y: 940
- x: 740
y: 1360Programme UR5e avec Point Attractor et Bounding Box
- Dans RViz afficher le collision box marker, cf. https://docs.aica.tech/core/examples/core-components/colliders#box-collider-example
schema: 2-0-6
dependencies:
core: v4.0.0
frames:
start:
reference_frame: world
position:
x: 0.016268
y: 0.460877
z: 0.574409
orientation:
w: 0.000502
x: 0.999979
y: -0.005594
z: -0.003165
on_start:
load:
- component: frame_broadcaster
- hardware: hardware
sequence:
start: sequence
sequences:
sequence:
display_name: Sequence
steps:
- check:
condition:
controller: joint_trajectory_controller
hardware: hardware
predicate: has_trajectory_succeeded
wait_forever: true
- call_service:
controller: ur_dashboard_controller
hardware: hardware
service: zero_ftsensor
- check:
condition:
controller: ur_dashboard_controller
hardware: hardware
predicate: zero_ftsensor_success
wait_forever: true
- switch_controllers:
hardware: hardware
deactivate: joint_trajectory_controller
components:
frame_broadcaster:
component: aica_core_components::ros::StaticFrameBroadcaster
display_name: Frame Broadcaster
parameters:
frame:
value: camera_link
type: string
reference_frame:
value: ur_tool0
type: string
pose_values:
value:
- -0.02
- -0.11752
- 0.032
- 1
- 0
- 0
- 0
type: double_array
broadcast_periodically:
value: true
type: bool
yolo_executor:
component: advanced_perception::object_detection::YoloExecutor
display_name: YOLO Executor
events:
transitions:
on_load:
lifecycle:
component: yolo_executor
transition: configure
on_configure:
lifecycle:
component: yolo_executor
transition: activate
on_activate:
load:
component: bounding_box_tracker
parameters:
rate:
value: 30
type: double
model_file:
value: /data/models/yolo12n.onnx
type: string
classes_file:
value: /data/models/coco.yaml
type: string
object_class:
value:
- scissors
type: string_array
conf_threshold:
value: 0.4
type: double
inputs:
image: /camera_streamer/image
outputs:
detections: /yolo_executor/detections
bounding_box_tracker:
component: object_detection_utils::BoundingBoxTracker
display_name: Bounding box tracker
events:
transitions:
on_load:
lifecycle:
component: bounding_box_tracker
transition: configure
on_configure:
lifecycle:
component: bounding_box_tracker
transition: activate
parameters:
rate:
value: 100
type: double
gains:
value:
- 0.008
- 0.008
type: double_array
decay_rate:
value: 8
type: double
reference_frame:
value: world
type: string
inputs:
detections: /yolo_executor/detections
outputs:
twist: /bounding_box_tracker/twist
box_collider:
component: aica_core_components::utility::BoxCollider
display_name: Box Collider
events:
predicates:
is_out_of_bounds:
set:
parameter: gains
value:
- 0
- 0
type: double_array
component: bounding_box_tracker
is_in_bounds:
set:
parameter: gains
value:
- 0.008
- 0.008
type: double_array
component: bounding_box_tracker
transitions:
on_load:
lifecycle:
component: box_collider
transition: configure
on_configure:
lifecycle:
component: box_collider
transition: activate
parameters:
x_size:
value: 0.8
type: double
y_size:
value: 0.3
type: double
z_size:
value: 0.5
type: double
inputs:
target: /hardware/robot_state_broadcaster/cartesian_state
center: /frame_to_signal/pose
frame_to_signal:
component: aica_core_components::ros::TfToSignal
display_name: Frame to Signal
events:
transitions:
on_load:
lifecycle:
component: frame_to_signal
transition: configure
on_configure:
lifecycle:
component: frame_to_signal
transition: activate
on_activate:
load:
component: box_collider
parameters:
frame:
value: start
type: string
outputs:
pose: /frame_to_signal/pose
camera_streamer:
component: core_vision_components::image_streaming::CameraStreamer
display_name: Camera Streamer
events:
transitions:
on_load:
load:
- component: yolo_executor
- component: frame_to_signal
lifecycle:
component: camera_streamer
transition: configure
on_configure:
lifecycle:
component: camera_streamer
transition: activate
outputs:
image: /camera_streamer/image
hardware:
hardware:
display_name: Hardware Interface
urdf: Universal Robots 5e
rate: 500
events:
transitions:
on_load:
load:
- controller: robot_state_broadcaster
hardware: hardware
- controller: joint_trajectory_controller
hardware: hardware
- controller: ur_impedance_controller
hardware: hardware
- controller: ur_dashboard_controller
hardware: hardware
parameters:
robot_ip: 192.168.56.101
controllers:
ur_dashboard_controller:
plugin: aica_ur_controllers/URDashboardController
events:
transitions:
on_load:
switch_controllers:
hardware: hardware
activate: ur_dashboard_controller
joint_trajectory_controller:
plugin: aica_core_controllers/trajectory/JointTrajectoryController
events:
transitions:
on_load:
switch_controllers:
hardware: hardware
activate: joint_trajectory_controller
on_deactivate:
load:
component: camera_streamer
switch_controllers:
hardware: hardware
activate: ur_impedance_controller
on_activate:
call_service:
controller: joint_trajectory_controller
hardware: hardware
service: set_trajectory
payload: |-
frames:
- start
durations:
- 2.0
robot_state_broadcaster:
plugin: aica_core_controllers/RobotStateBroadcaster
outputs:
cartesian_state: /hardware/robot_state_broadcaster/cartesian_state
ft_sensor: /hardware/robot_state_broadcaster/ft_sensor
events:
transitions:
on_load:
switch_controllers:
hardware: hardware
activate: robot_state_broadcaster
ur_impedance_controller:
plugin: aica_ur_controllers/URImpedanceController
parameters:
selection_vector:
value:
- 1
- 1
- 1
- 0
- 0
- 1
type: int_array
force_limit:
value:
- 40
- 40
- 40
- 30
- 30
- 30
type: vector
stiffness:
value:
- 500
- 500
- 500
- 400
- 400
- 400
type: vector
damping:
value:
- 50
- 50
- 50
- 10
- 10
- 10
type: vector
inputs:
command: /bounding_box_tracker/twist
graph:
positions:
on_start:
x: -740
y: -360
stop:
x: -740
y: -260
components:
frame_broadcaster:
x: -420
y: -580
yolo_executor:
x: 760
y: 480
bounding_box_tracker:
x: 1300
y: 600
box_collider:
x: 840
y: 1020
frame_to_signal:
x: 280
y: 1140
camera_streamer:
x: 180
y: 520
hardware:
hardware:
x: 1880
y: -360
sequences:
sequence:
x: -420
y: -280
edges:
yolo_to_marker_marker_pose_signal_point_attractor_attractor:
path:
- x: 1360
y: 520
- x: 1360
y: 680
yolo_executor_detections_yolo_to_marker_json_input:
path:
- x: 1160
y: 120
- x: 1160
y: 220
- x: 860
y: 220
- x: 860
y: 520
yolo_to_marker_twist_hardware_hardware_ik_velocity_controller_command:
path:
- x: 1740
y: 680
- x: 1740
y: 920
yolo_to_marker_twist_hardware_hardware_velocity_impedance_controller_command:
path:
- x: 1740
y: 680
- x: 1740
y: 920
hardware_hardware_robot_state_broadcaster_ft_sensor_hardware_hardware_velocity_impedance_controller_ft_sensor:
path:
- x: 1840
y: 700
- x: 1840
y: 960
hardware_hardware_ur_dashboard_controller_zero_ftsensor_success_sequence_sequence_condition_input_2:
path:
- x: -60
y: 80
yolo_to_marker_on_activate_hardware_hardware_ur_impedance_controller:
path:
- x: 1840
y: 700
- x: 1840
y: 1060
yolo_to_marker_twist_hardware_hardware_ur_impedance_controller_command:
path:
- x: 1740
y: 780
- x: 1740
y: 1220
orbbec_camera_on_load_yolo_executor_yolo_executor:
path:
- x: 680
y: 620
- x: 680
y: 540
orbbec_camera_on_load_frame_to_signal_frame_to_signal:
path:
- x: 680
y: 620
- x: 680
y: 1020
- x: 240
y: 1020
- x: 240
y: 1200
orbbec_camera_color_image_yolo_executor_image:
path:
- x: 640
y: 700
- x: 640
y: 780
on_start_on_start_frame_broadcaster_frame_broadcaster:
path:
- x: -540
y: -300
- x: -540
y: -520
on_start_on_start_sequence_sequence:
path:
- x: -540
y: -300
- x: -540
y: -220
hardware_joint_trajectory_controller_has_trajectory_succeeded_condition_sequence_sequence_condition_input_0:
path:
- x: -380
y: 440
sequence_sequence_event_trigger_1_hardware_hardware_ur_dashboard_controller_zero_ftsensor:
path:
- x: -220
y: 140
hardware_ur_dashboard_controller_zero_ftsensor_success_condition_sequence_sequence_condition_input_2:
path:
- x: -60
y: 60
sequence_sequence_event_trigger_3_hardware_hardware_joint_trajectory_controller:
path:
- x: 100
y: 200
box_collider_is_out_of_bounds_bounding_box_tracker_bounding_box_tracker:
path:
- x: 1400
y: 1280
- x: 1400
y: 1000
- x: 1280
y: 1000
- x: 1280
y: 660
box_collider_is_in_bounds_bounding_box_tracker_bounding_box_tracker:
path:
- x: 1360
y: 1240
- x: 1360
y: 1040
- x: 1260
y: 1040
- x: 1260
y: 660
frame_to_signal_on_activate_box_collider_box_collider:
path:
- x: 800
y: 1320
- x: 800
y: 1080
camera_streamer_on_load_yolo_executor_yolo_executor:
path:
- x: 620
y: 700
- x: 620
y: 540
camera_streamer_on_load_frame_to_signal_frame_to_signal:
path:
- x: 620
y: 700
- x: 620
y: 1060
- x: 260
y: 1060
- x: 260
y: 1200
hardware_hardware_joint_trajectory_controller_on_deactivate_camera_streamer_camera_streamer:
path:
- x: 100
y: 360
- x: 100
y: 580
hardware_hardware_joint_trajectory_controller_on_deactivate_hardware_hardware_ur_impedance_controller:
path:
- x: 1820
y: 360
- x: 1820
y: 1040
hardware_hardware_joint_trajectory_controller_on_activate_hardware_hardware_joint_trajectory_controller_set_trajectory:
path:
- x: 1800
y: 320
- x: 1800
y: 520
yolo_executor_detections_bounding_box_tracker_detections:
path:
- x: 1240
y: 780
- x: 1240
y: 820
bounding_box_tracker_twist_hardware_hardware_ur_impedance_controller_command:
path:
- x: 1760
y: 820
- x: 1760
y: 1200
hardware_hardware_robot_state_broadcaster_cartesian_state_box_collider_target:
path:
- x: 740
y: 940
- x: 740
y: 1360Machine Learning LeRobot avec SO-ARM101 - Legacy
Essai de déploiement sur Windows via WSL2, Docker, et Dev Container
Pour l'instant pas de test satisfaisant pour l'exécution d'un modèle sur le vrai robot. Passer au WSL2 les ports USB où sont connectés les robots et caméras fait crasher le conteneur. Probablement que la communication série n'est pas supporté.
- Cloner https://github.com/huggingface/lerobot dans un conteneur WSL2, par exemple Ubuntu
- Depuis le conteneur Ubuntu, ouvrir un Terminal, se placer dans le répertoire cloné
cd ~/lerobot_devcontainer, et lancer Visual Studio Code en tapantcode . - Ajouter un répertoire
~/lerobot_devcontainer/.devcontaineret un fichier dedans~/lerobot_devcontainer/.devcontainer/devcontainer.jsoncontenant :
{ "build": { // Path is relative to the devcontainer.json file. "dockerfile": "../docker/lerobot-gpu-dev/Dockerfile" }} - Lancer la commande VSCode : Reopen in container
Tentatives pour faire passer le port série à WSL2 :
wsl --shutdown
winget install --interactive --exact dorssel.usbipd-win
usbipd list
wmic diskdrive list brief
wsl --mount \\.\PHYSICALDRIVE1
wsl.exe --version
wsl --mount \\.\PHYSICALDRIVE1 --bare
wsl --mount \\.\PHYSICALDRIVE1 --partition 2 --type ext4
wsl --shutdown
ipconfig
net localgroup docker-users "gauthier.hentz" /ADD
wsl --set-default ubuntu
wsl --shutdown
usbipd list
usbipd bind --busid 1-1
usbipd list
usbipd attach --wsl --busid 1-1
usbipd attach --wsl --busid 2-1
Visualiser et rejouer des DataSets (avant hardware refactor)
- Visualiser un DataSet
python lerobot/scripts/visualize_dataset.py --repo-id lerobot/pusht --root ./my_local_data_dir --local-files-only 1 --episode-index 0
python lerobot/scripts/visualize_dataset_html.py \
--repo-id cadene/act_so100_5_lego_test_080000 \
--local-files-only 1- Rejouer un DataSet (ou une évaluation de modèle) sur le robot
python lerobot/scripts/control_robot.py \
--robot.type=so101 \
--control.type=replay \
--control.fps=30 \
--control.repo_id=cadene/act_so100_5_lego_test_080000 \
--control.episode=0- Rejouer la Policy
cadene/act_so100_5_lego_test_080000du modèle ACT pour le SO-ARM101- En sauvegardant l'évaluation dans
outputs/eval/act_so100_5_lego_test_080000_haguenau
- En sauvegardant l'évaluation dans
python lerobot/scripts/control_robot.py \
--robot.type=so101 \
--control.type=record \
--control.fps=30 \
--control.single_task="Grasp a lego block and put it in the bin." \
--control.repo_id=outputs/eval/act_so100_5_lego_test_080000_haguenau \
--control.tags='["tutorial"]' \
--control.warmup_time_s=5 \
--control.episode_time_s=30 \
--control.reset_time_s=30 \
--control.num_episodes=10 \
--control.push_to_hub=false \
--control.policy.path=cadene/act_so100_5_lego_test_080000