Ne plus bouger les servos jusqu'à l'assemblage
#### Construction et assemblage mécanique Une version 101 est sortie en 05/2025. Le Leader est plus simple à assembler, et plus besoin de[ démonter les servos pour enlever un engrenage et les rendre passifs](https://huggingface.co/docs/lerobot/so100#remove-the-gears-of-the-6-leader-motors). Il suffit d'acheter le kit de 6 servos avec 3 rapports de transmission différents : - [https://github.com/TheRobotStudio/SO-ARM100?tab=readme-ov-file#getting-your-own-so101](https://github.com/TheRobotStudio/SO-ARM100?tab=readme-ov-file#getting-your-own-so101) - [https://www.alibaba.com/product-detail/6PCS-7-4V-STS3215-Servos-for\_1601428584027.html?spm=a2747.product\_manager.0.0.757c2c3clU7uH3](https://www.alibaba.com/product-detail/6PCS-7-4V-STS3215-Servos-for_1601428584027.html?spm=a2747.product_manager.0.0.757c2c3clU7uH3) - Imprimer la mâchoire statique intégrant le support de caméra : [https://github.com/TheRobotStudio/SO-ARM100/blob/main/Optional/Wrist\_Cam\_Mount\_32x32\_UVC\_Module/README.md](https://github.com/TheRobotStudio/SO-ARM100/blob/main/Optional/Wrist_Cam_Mount_32x32_UVC_Module/README.md) - Suivre le guide d'assemblage pour le SO101 : [https://huggingface.co/docs/lerobot/so101#step-by-step-assembly-instructions](https://huggingface.co/docs/lerobot/so101#step-by-step-assembly-instructions) - Pour le SO100 : [https://huggingface.co/docs/lerobot/so100#step-by-step-assembly-instructions](https://huggingface.co/docs/lerobot/so100#step-by-step-assembly-instructions) #### Astuces pour l'assemblage - Mettre une vis sur l'arbre moteur et l'axe passif (à l'opposée de l'arbre moteur) quand il y a la place d'en mettre une (vérifier qu'il y aura la place après assemblage des éléments autour du moteur) - Ne plus bouger les servos après leur initialisation qui les met à l'angle 0. Dans l'idéal, assembler les éléments de manière à ce que le robot soit en configuration initiale avec tous les moteurs à 0 - En pratique, on monte le robot dans la configuration ci-dessous. C'est l'étape de calibration qui permettra de définir un offset pour que le zéro des moteurs corresponde au modèle cinématique du SO-ARM10X [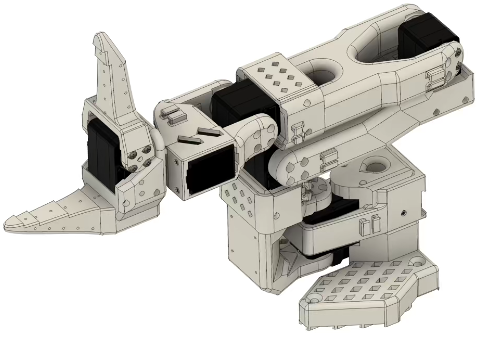](https://innovation.iha.unistra.fr/uploads/images/gallery/2025-06/A0gimage.png) - Il est possible d'ajouter un offset dans la configuration des servomoteurs, par exemple via les scripts du projet LeRobot - Attention si vous démarrez le robot sous ROS avant d'avoir lancer la calibration LeRobot qui fixe l'Offset dans les servomoteurs, vous risquez de casser le robot ### Banc de Machine Learning LeRobot #### Agencement des caméras et robots Le nombre, le positionnement et la qualité des caméras sont importants pour la qualité du DataSet : - Plusieurs setup sont proposés : - Caméras d'environnement : [https://github.com/TheRobotStudio/SO-ARM100?tab=readme-ov-file#2-overhead-camera-mount](https://github.com/TheRobotStudio/SO-ARM100?tab=readme-ov-file#2-overhead-camera-mount) - Caméras de poignet : [https://github.com/TheRobotStudio/SO-ARM100?tab=readme-ov-file#5-wristmount-cameras](https://github.com/TheRobotStudio/SO-ARM100?tab=readme-ov-file#5-wristmount-cameras) - Attention au champ de vision des caméras si vous prenez une de vos webcams - Il risque de ne pas être assez "fish eye" - Par exemple, la WebCam Logitech C270 (720p) a un champ trop étroit pour être intégrée au [module Overhead](https://github.com/TheRobotStudio/SO-ARM100/blob/main/Optional/Overhead_Cam_Mount_Webcam/README.md) ##### Au FabLab de IUT Haguenau [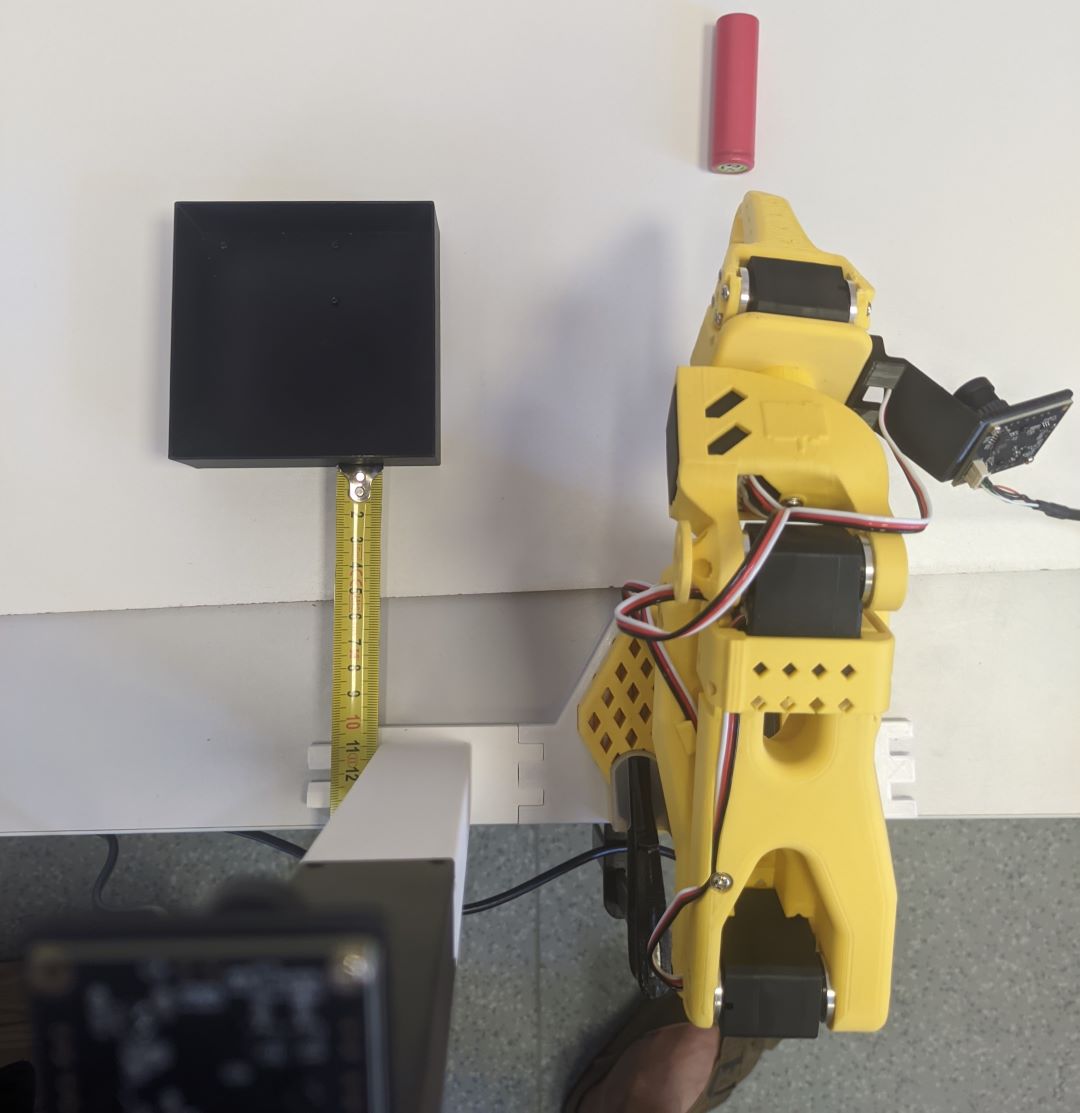](https://innovation.iha.unistra.fr/uploads/images/gallery/2025-07/pxl-20250613-142740983-crop.jpg) - On choisit de prendre deux caméras au format 32 x 32 , la version 1080p permet d'augmenter la qualité du DataSet - [https://www.amazon.com/innomaker-Computer-Raspberry-Support-Windows/dp/B0CNCSFQC1/132-7372155-9780230](https://www.amazon.com/innomaker-Computer-Raspberry-Support-Windows/dp/B0CNCSFQC1/132-7372155-9780230) - Imprimer et assembler la mâchoire statique intégrant le support de caméra : [https://github.com/TheRobotStudio/SO-ARM100/blob/main/Optional/Wrist\_Cam\_Mount\_32x32\_UVC\_Module/README.md](https://github.com/TheRobotStudio/SO-ARM100/blob/main/Optional/Wrist_Cam_Mount_32x32_UVC_Module/README.md) - Imprimer et assembler le support de robot et de caméra Overhead : [https://github.com/TheRobotStudio/SO-ARM100/blob/main/Optional/Overhead\_Cam\_Mount\_32x32\_UVC\_Module/README.md](https://github.com/TheRobotStudio/SO-ARM100/blob/main/Optional/Overhead_Cam_Mount_32x32_UVC_Module/README.md) #### Calibration des caméras [https://huggingface.co/docs/lerobot/cameras](https://huggingface.co/docs/lerobot/cameras) # Assembler un PC d'IA en 2026 Usages : - Serveur pour enseignement robotique et IA - Pilotage de robots temps-réel avec ROS2 - Inférence de larges modèles d'IA, ex. - Fine-tuning de modèles d'IA, ex. LeRobot Configuration pour un total d'environ 1500€ : - Carte graphique Nvidia RTX 5070 Ti 16GB (~900€) - Processeur AMD AM5 Ryzen 7 7700 (~190€) - [https://www.reddit.com/r/MSI\_Gaming/comments/1090yb6/65w\_ryzen\_7\_7700\_performance\_scaling\_with\_pbo/](https://www.reddit.com/r/MSI_Gaming/comments/1090yb6/65w_ryzen_7_7700_performance_scaling_with_pbo/) - Carte mère moyenne gamme (~150€) AMD AM5 PCIe 5.0 x16 b650/e [https://pausehardware.com/comparatif-des-chipsets-amd-x870-x670-b650-ryzen/](https://pausehardware.com/comparatif-des-chipsets-amd-x870-x670-b650-ryzen/) [https://www.cdiscount.com/mp-267-asu1705279946652.html](https://www.cdiscount.com/mp-267-asu1705279946652.html) [https://www.pccomponentes.fr/carte-mere-gigabyte-b650e-eagle-amd-b650-socket-am5-ddr5-atx-wifi-6e-pcie-50-raid-rgb](https://www.pccomponentes.fr/carte-mere-gigabyte-b650e-eagle-amd-b650-socket-am5-ddr5-atx-wifi-6e-pcie-50-raid-rgb) [https://www.pccomponentes.fr/carte-mere-asus-tuf-gaming-b650e-plus-wifi-b650-am5-ddr5-atx-wifi-6e-pcie-50-raid](https://www.pccomponentes.fr/carte-mere-asus-tuf-gaming-b650e-plus-wifi-b650-am5-ddr5-atx-wifi-6e-pcie-50-raid) - 1 x PCIe 5.0 x16 @CPU - 1 x PCIe 4.0 x16 (max. @x1) @PCH - 3 x M2 (1 x PCIe 5.0 et 2 x PCIe 4.0) - 1 x USB 20GBps - 4 x ports SATA - Wi-Fi 6E, Ethernet Realtek 2,5 Gbit - 4 x DDR5 - 64GB DDR5 5600 MHz - Alimentation 750-850W 80+ Gold - Boîtier silencieux Antec P10C silent ### 5070 Ti - Installer nvidia-driver >570 et linux-kernel >6.11 - Installer la version open du driver : `nvidia-driver-570-open` Donc par exemple : ``` export distro="ubuntu2404" export arch="x86_64" export version="570" wget https://developer.download.nvidia.com/compute/cuda/repos/$distro/$arch/cuda-keyring_1.1-1_all.deb sudo dpkg -i cuda-keyring_1.1-1_all.deb sudo apt update sudo apt install nvidia-driver-pinning-$version sudo IGNORE_PREEMPT_RT_PRESENCE=1 apt install cuda-drivers nvidia-driver-$version-open ``` Benchmark glmark2 en résolution 1920x1080 [https://openbenchmarking.org/test/pts/glmark2](https://openbenchmarking.org/test/pts/glmark2) ``` glmark2 -s 1920x1080 ======================================================= glmark2 2023.01 ======================================================= OpenGL Information GL_VENDOR: NVIDIA Corporation GL_RENDERER: NVIDIA GeForce RTX 5070 Ti/PCIe/SSE2 GL_VERSION: 4.6.0 NVIDIA 570.211.01 Surface Config: buf=32 r=8 g=8 b=8 a=8 depth=24 stencil=0 samples=0 Surface Size: 1920x1080 windowed ======================================================= [build] use-vbo=false: FPS: 17118 FrameTime: 0.058 ms [build] use-vbo=true: FPS: 29160 FrameTime: 0.034 ms [texture] texture-filter=nearest: FPS: 24267 FrameTime: 0.041 ms [texture] texture-filter=linear: FPS: 29185 FrameTime: 0.034 ms [texture] texture-filter=mipmap: FPS: 29395 FrameTime: 0.034 ms [shading] shading=gouraud: FPS: 28971 FrameTime: 0.035 ms [shading] shading=blinn-phong-inf: FPS: 28964 FrameTime: 0.035 ms [shading] shading=phong: FPS: 28750 FrameTime: 0.035 ms [shading] shading=cel: FPS: 28703 FrameTime: 0.035 ms [bump] bump-render=high-poly: FPS: 26538 FrameTime: 0.038 ms [bump] bump-render=normals: FPS: 29854 FrameTime: 0.033 ms [bump] bump-render=height: FPS: 29795 FrameTime: 0.034 ms [effect2d] kernel=0,1,0;1,-4,1;0,1,0;: FPS: 25300 FrameTime: 0.040 ms [effect2d] kernel=1,1,1,1,1;1,1,1,1,1;1,1,1,1,1;: FPS: 19425 FrameTime: 0.051 ms [pulsar] light=false:quads=5:texture=false: FPS: 27432 FrameTime: 0.036 ms [desktop] blur-radius=5:effect=blur:passes=1:separable=true:windows=4: FPS: 9557 FrameTime: 0.105 ms [desktop] effect=shadow:windows=4: FPS: 17248 FrameTime: 0.058 ms [buffer] columns=200:interleave=false:update-dispersion=0.9:update-fraction=0.5:update-method=map: FPS: 3425 FrameTime: 0.292 ms [buffer] columns=200:interleave=false:update-dispersion=0.9:update-fraction=0.5:update-method=subdata: FPS: 3852 FrameTime: 0.260 ms [buffer] columns=200:interleave=true:update-dispersion=0.9:update-fraction=0.5:update-method=map: FPS: 4847 FrameTime: 0.206 ms [ideas] speed=duration: FPS: 24299 FrameTime: 0.041 ms [jellyfish]`sudo apt install nvidia-driver` installe la dernière version du driver dispo, mais cuda-drivers n'est pas forcément dispo pour cette version. Donc on va chercher la bonne version.
Pour supprimer tous les drivers nvidia précédemment installés. **A utiliser avec précautions** : `sudo apt autoremove --purge *nvidia*`
##### Installation du `nvidia-driver` et de cuda - On installe le dépôt CUDA - ``` wget https://developer.download.nvidia.com/compute/cuda/repos/$distro/x86_64/cuda-keyring_1.1-1_all.deb sudo dpkg -i cuda-keyring_1.1-1_all.deb sudo apt update ``` - On regarde les version de `nvidia-driver` qui peuvent être pin : - `sudo apt install nvidia-driver-pinning-*` - On regarde les version des `cuda-drivers` qui peuvent être installées : - `sudo apt list cuda-drivers-*` - On regarde quelle version de `nvidia-driver` serait installé pour une version voulue de cuda : - Exemple : `sudo apt install cuda-13-1` OU `sudo apt install cuda-12-8` - On choisi de pin la version de `nvidia-driver` qui a un `cuda-drivers` et qui permet d'installer la bonne version de CUDA : - Exemple : `sudo apt install nvidia-driver-pinning-550` installe CUDA 12.5 - Exemple : `sudo apt install nvidia-driver-pinning-560` installe CUDA 12.6 - Exemple : `sudo apt install nvidia-driver-pinning-570` installe CUDA 12.8 - Exemple : `sudo apt install nvidia-driver-pinning-580` installe CUDA 13.0 - On install les drivers propriétaires (Calcul et Affichage GPU) : - `sudo IGNORE_PREEMPT_RT_PRESENCE=1 apt install cuda-drivers` (pour patcher même les RT Kernel) - Installer nvidia-container-toolkit pour Docker : `sudo apt install nvidia-container-toolkit` [https://docs.nvidia.com/datacenter/cloud-native/container-toolkit/latest/install-guide.html#configuring-docker](https://docs.nvidia.com/datacenter/cloud-native/container-toolkit/latest/install-guide.html#configuring-docker) ##### Optionnel - Si on est sur un serveur, on peut aussi n'installer que les composants de Calcul GPU : `sudo apt -V install libnvidia-compute nvidia-dkms` - Si on est sur un PC, on peut aussi n'installer que les composants d'Affichage GPU : `sudo apt -V install libnvidia-gl nvidia-dkms` - Pour installer les composants Libres (Open Kernel Modules), voir : [https://docs.nvidia.com/datacenter/tesla/driver-installation-guide/ubuntu.html](https://docs.nvidia.com/datacenter/tesla/driver-installation-guide/ubuntu.html) - Installer le SDK CUDA `sudo apt install cuda-toolkit` - puis les paquets GDS `sudo apt install nvidia-gds` (qui contient `nvidia-fs` kernel module) - pour `arm64-jetson` : `sudo apt install cuda-compat` [https://docs.nvidia.com/cuda/cuda-installation-guide-linux/#network-repo-installation-for-ubuntu](https://docs.nvidia.com/cuda/cuda-installation-guide-linux/#network-repo-installation-for-ubuntu) #### Vérification de la compatibilité GPU - Application IA ##### Procédure : - Lister les applications d'IA qu'on va vouloir faire tourner - Regarder les **prérequis de la version actuelle de l'application** IA - Regarder les prérequis de ses dépendances - Par exemple YOLO requiert onnxruntime-gpu - Regarder les **prérequis en termes GPU** (Compute Capability, etc.) - Regarder les **prérequis en termes d'environnement d'exécution** - Version d'Ubuntu et drivers dispos - Version de CUDA, cuDNN, Pytorch - Acheter le GPU nécessaire et installer la version d'Ubuntu nécessaire - Si on est motivé et qu'on veut essayer avec notre GPU et notre version d'Ubuntu actuelle, regarder les prérequis des versions précédentes et voir s'il y en a une qui passe ##### On a une application d'IA donnée Par exemple YOLO : - utilise onnxruntime [https://onnxruntime.ai/docs/execution-providers/CUDA-ExecutionProvider.html](https://onnxruntime.ai/docs/execution-providers/CUDA-ExecutionProvider.html) - onnxruntime-gpu >=1.18.1 : CUDA 12.x ; cuDNN 9.x ; PyTorch >= 2.4.0 - onnxruntime-gpu < 1.18.0 : CUDA 12.x ; cuDNN 8.x ; PyTorch < 2.4.0 - onnxruntime-gpu 1.18-1.20 : CUDA 11.8 ; cuDNN 8.x ; PyTorch <= 2.3.1 [ONNX Runtime (ORT) qui sert à l'inférence des modèles Yolo sur GPU nécessitent des Compute Capability](https://github.com/microsoft/onnxruntime/blob/v1.24.2/tools/ci_build/github/linux/build_cuda_c_api_package.sh#L4-L7) >= 6.0 - onnxruntime-gpu >= [1.16](https://github.com/microsoft/onnxruntime/blob/rel-1.16.0/tools/ci_build/github/linux/build_cuda_c_api_package.sh) supports CC 6.0 or above - **onnxruntime-gpu < 1.18 requiert CUDA 11.x** - **L'environnement YOLO de AICA utilise onnxruntime-gpu=1.22.2** - **onnxruntime-gpu >=1.24 requiert CC 6.0 pour CUDA 12 et CC 7.5 pour CUDA 13** ##### Différentes versions de l'environnement d'exécution - Grâce à la [compatibilité des versions mineures de Nvidia CUDA](https://docs.nvidia.com/deploy/cuda-compatibility/#minor-version-compatibility), une application d'IA compilée avec CUDA 11.8 peut être exécutée avec n'importe laquelle des version CUDA 11.x . Idem pour CUDA 12.x . - Par contre une application cuDNN 8.x n'est pas compatible avec cuDNN 9.x . - PyTorch 2.3 et inférieur utilisent cuDNN 8.x - PyTorch 2.4 et supérieur utilisent cuDNN 9.x - Il faut donc choisir la version de Pytorch en fonction des versions de CUDA et cuDNN qui sont compatibles avec l'environnement d'exécution (carte graphique et driver) [https://docs.nvidia.com/deeplearning/cudnn/backend/latest/reference/support-matrix.html](https://docs.nvidia.com/deeplearning/cudnn/backend/latest/reference/support-matrix.html) cuDNN>=v9.12.0 supporte : - CUDA 12.x (nvidia-driver>=525.60.13) - CUDA 13.x (nvidia-driver>=580.65.06) - CUDA CC>=7.5 cuDNN<=v9.11.1 - CUDA 12.x (nvidia-driver>=525.60.13) - CUDA CC>=5.0-9.0 (10.0-12.0 avec CUDA>=12.8 et nvidia-driver>=570.26) cuDNN<=v9.10.2 : - CUDA 12.x (nvidia-driver>=525.60.13) (12.8-9 pour >=570.26 et CC 10-12) - CUDA 11.x (nvidia-driver>=450.80.02) - CUDA CC>=5.0-9.0 (10.0-12.0 avec CUDA>=12.8 et nvidia-driver>=570.26) ##### Compatibilité de version d'Ubuntu Sur Ubuntu 24.04 : - les `sudo apt list nvidia-driver*` dispos sont 460-470,515-590 - les `sudo apt list cuda-drivers*` dispos sont 550,555,560,565,570,575,580 - les `sudo apt list nvidia-driver-pinning*` dispo sont 570,580,590 - les `sudo apt list cuda-toolkit*` seuls CUDA 12.5-13.1 sont dispos ##### On a une carte graphique donnée : - Vérification du **Compute Capability (CC)** [https://developer.nvidia.com/cuda/gpus](https://developer.nvidia.com/cuda/gpus) - Si on est dans cette liste, donc **CC >= 7.5 c'est TOP, on est compatible avec onnx et CUDA 13** - A partir de 6.0 on est compatible avec onnx et CUDA 12 (mais pas CUDA 13) - On conseille de **laisser tomber l'IA avec des CC de 5.0** ou inférieur - Si on a **5.2 >= CC < 6.0** , on a une carte Legacy, voir ci-dessous, **c'est compliqué** - On vérifie la version de CUDA Max supportée en fonction du CC : [https://stackoverflow.com/questions/28932864/which-compute-capability-is-supported-by-which-cuda-versions](https://stackoverflow.com/questions/28932864/which-compute-capability-is-supported-by-which-cuda-versions) - On va donc pouvoir chercher une compatibilité d'exécution avec CUDA 12.x et CUDA 11.x , mais pas CUDA 13.x Problèmes avec les GPU NVidia anciens : [https://github.com/ultralytics/ultralytics/issues/5305](https://github.com/ultralytics/ultralytics/issues/5305) #### GPU NVidia anciens / Legacy On lance Yolo et on a l'erreur suivante : `10:17:40.111 [yolo_executor] error: ONNX Runtime error during model query: Non-zero status code returned while running QuickGelu node. Name:'node_silu/QuickGeluFusion/' Status Message: CUDA error cudaErrorNoKernelImageForDevice:no kernel image is available for execution on the device` [ONNX Runtime (ORT) qui sert à l'inférence des modèles Yolo sur GPU nécessitent des Compute Capability](https://github.com/microsoft/onnxruntime/blob/v1.24.2/tools/ci_build/github/linux/build_cuda_c_api_package.sh#L4-L7) > 5.2 - onnxruntime-gpu [1.14](https://github.com/microsoft/onnxruntime/blob/rel-1.14.0/tools/ci_build/github/linux/build_cuda_c_api_package.sh) supports CC 3.7 or above - **onnxruntime-gpu [1.15](https://github.com/microsoft/onnxruntime/blob/rel-1.15.0/tools/ci_build/github/linux/build_cuda_c_api_package.sh) supports CC 5.2 or above** - onnxruntime-gpu >=[1.16](https://github.com/microsoft/onnxruntime/blob/rel-1.16.0/tools/ci_build/github/linux/build_cuda_c_api_package.sh) supports CC 6.0 or above - **onnxruntime-gpu <1.18 requiert CUDA 11.x** - **>1.24 requiert CC 6.0 pour CUDA 12 et CC 7.5 pour CUDA 13** - **L'environnement YOLO de AICA utilise onnxruntime-gpu=1.22.2** - FP16 models ne tournent qu'à partir de CC 5.3 - C'est pour ça que l'erreur indique qu'il n'y a pas de kernel FP16 compilé pour notre GPU - Problème : CUDA 11.x n'est pas dispo sur Ubuntu 24.04 - Mais peut être installé : [https://askubuntu.com/questions/1536271/can-i-install-cuda-11-4-in-ubuntu-24-04-if-so-how](https://askubuntu.com/questions/1536271/can-i-install-cuda-11-4-in-ubuntu-24-04-if-so-how) Solution (voir analyse ci-dessous) : - Installer le driver 470 - Installer CUDA 11.8? en suivant [https://askubuntu.com/questions/1536271/can-i-install-cuda-11-4-in-ubuntu-24-04-if-so-how](https://askubuntu.com/questions/1536271/can-i-install-cuda-11-4-in-ubuntu-24-04-if-so-how) - Exporter le modèle onnx en kernel FP32 - Déployer le modèle YOLO dans un environnement Legacy avec onnxruntime-gpu [1.15](https://github.com/microsoft/onnxruntime/blob/rel-1.15.0/tools/ci_build/github/linux/build_cuda_c_api_package.sh) [https://github.com/microsoft/onnxruntime/issues/17861#issuecomment-1758098712](https://github.com/microsoft/onnxruntime/issues/17861#issuecomment-1758098712) ##### On a une carte graphique donnée | par exemple Quadro M620 (GM107GLM) : - Vérification du Compute Capability [https://developer.nvidia.com/cuda/gpus/legacy](https://developer.nvidia.com/cuda/gpus/legacy) | CC5.2 - On conseille de **laisser tomber l'IA avec des Compute Capability de 5.0** ou inférieur | - Si on a une Compute Capability entre 5.2 et 7.2 , on peut envisager des choses mais c'est compliqué - On vérifie la version de CUDA Max supportée : [https://stackoverflow.com/questions/28932864/which-compute-capability-is-supported-by-which-cuda-versions](https://stackoverflow.com/questions/28932864/which-compute-capability-is-supported-by-which-cuda-versions) | pour CC5.2 : CUDA 12.x - On va donc pouvoir chercher une compatibilité d'exécution avec CUDA 12.x et CUDA 11.x , mais pas CUDA 13.x - Les `nvidia-driver` dispos sont 460-470,515-590 (535 est testé/recommandé) - mais les `cuda-drivers` dispos sont 550,555,560,565,570,575,580 - et les `nvidia-driver-pinning` et dispo de 570,580,590 - Exemple : `sudo apt install nvidia-driver-470` mais CUDA 11.x pas dispo sur Ubuntu 24.04 - Exemple : `sudo apt install nvidia-driver-pinning-550` installe CUDA 12.5 - Exemple : `sudo apt install nvidia-driver-pinning-560` installe CUDA 12.6 - Exemple : `sudo apt install nvidia-driver-pinning-570` installe CUDA 12.8 - Exemple : `sudo apt install nvidia-driver-pinning-580` installe CUDA 13.0 - Avec CUDA 12.0-1 et le driver 535 on peut avoir v8.9.2<=cuDNN<=v9.11.1 - Avec CUDA 12.2 v8.9.7<=cuDNN<=v9.11.1 - Avec CUDA >=12.3 v9<=cuDNN<=v9.11.1 - Donc il faudrait CUDA 12.0-2 - mais `sudo apt list cuda-toolkit*` seuls CUDA 12.5-13.1 sont dispos Option 1 : Driver Version: 580 CUDA Version: 13.0 - On n'a pas cuDNN v8 - on a `cuda-drivers-580` Option 2 : Driver Version: 570 CUDA Version: 12.8 - - on a `cuda-drivers-570` Option 3 : Driver Version: 535.288.01 CUDA Version: 12.2 - On a v8.9.7<=cuDNN<=v9.11.1 - Mais on n'a pas `cuda-drivers` Option 4 : Driver Version: 470 CUDA Version: 11.x - Installer CUDA 11.8? en suivant [https://askubuntu.com/questions/1536271/can-i-install-cuda-11-4-in-ubuntu-24-04-if-so-how](https://askubuntu.com/questions/1536271/can-i-install-cuda-11-4-in-ubuntu-24-04-if-so-how) - On n'a pas `cuda-drivers` -> Problème ? [https://pytorch.org/get-started/previous-versions/](https://pytorch.org/get-started/previous-versions/) - Avec pytorch 2.1.1 et 2.2.0 , c'est cuddn 8.9.2 qui est installé par défaut - pytorch <2.2.0 n'est plus supporté dans pip [https://docs.nvidia.com/deeplearning/cudnn/archives/cudnn-892/support-matrix/index.html](https://docs.nvidia.com/deeplearning/cudnn/archives/cudnn-892/support-matrix/index.html) cuDNN=v8.9.2 : - CUDA 12.0-1 (nvidia-driver>=525.60.13) - CUDA 11.x (nvidia-driver>=450.80.02) - CUDA CC>=5.0 <=8.6 (8.9-9.0 avec CUDA>=11.8) - Avec pytorch ... c'est cuddn 8.9.7 qui est installé par défaut [https://docs.nvidia.com/deeplearning/cudnn/archives/cudnn-897/support-matrix/index.html](https://docs.nvidia.com/deeplearning/cudnn/archives/cudnn-897/support-matrix/index.html) cuDNN=v8.9.7 : - CUDA 12.0-2 (nvidia-driver>=525.60.13) - CUDA 11.x (nvidia-driver>=450.80.02) - CUDA CC>=5.0 <=8.6 (8.9-9.0 avec CUDA>=11.8) Voir aussi [https://docs.nvidia.com/deeplearning/cudnn/onnxruntime-gpuarchives/index.html](https://docs.nvidia.com/deeplearning/cudnn/archives/index.html) Avec : ``` #syntax=ghcr.io/aica-technology/app-builder:v2 # launch with bash: [core] "image" = "v5.1.0" [packages] # add components #"@aica/components/rl-policy-components" = "v3.0.0" "@aica/components/advanced-perception" = "v1.0.0" # contains YoloExecutor "@aica/components/core-vision" = "v1.1.2" # contains CameraStreamer "@aica/foss/toolkits/cuda" = "v1.0.0-cuda24.12" # prerequisite for NVidia GPU acceleration "@aica/foss/toolkits/ml" = "v1.0.0-gpu24.12" # prerequisite for ML model inference # other extensions "object-detection-utils" # self-built component to feed goal frame extracted from yolo to robot velocity controller # add hardware collections "@aica/collections/intel-realsense-collection" = "v2.0.1" # D4XX and L515 cameras models, stream RGBD "@aica/collections/ur-collection" = "v4.3.0" ``` On a : ``` ros2@iha-portrob-1:~/examples$ python3 -m torch.utils.collect_envvérifier l'adresse IP du robot
```yaml schema: 2-0-6 dependencies: core: v5.1.0 on_start: load: - hardware: hardware - component: camera_streamer components: yolo_executor: component: advanced_perception::object_detection::YoloExecutor display_name: YOLO Executor events: transitions: on_load: lifecycle: component: yolo_executor transition: configure on_configure: lifecycle: component: yolo_executor transition: activate on_activate: load: component: bounding_box_tracker parameters: model_file: value: /yolo-example-data/yolo12n.onnx type: string classes_file: value: /yolo-example-data/coco.yaml type: string object_class: value: - scissors type: string_array conf_threshold: value: 0.4 type: double num_threads: value: 2 type: int inputs: image: /camera_streamer/image outputs: detections: /yolo_executor/detections camera_streamer: component: core_vision_components::image_streaming::CameraStreamer display_name: Camera Streamer events: transitions: on_load: lifecycle: component: camera_streamer transition: configure on_configure: lifecycle: component: camera_streamer transition: activate on_activate: load: component: yolo_executor parameters: camera_frame: value: tool0 type: string outputs: image: /camera_streamer/image bounding_box_tracker: component: object_detection_utils::BoundingBoxTracker display_name: Bounding box tracker events: transitions: on_load: lifecycle: component: bounding_box_tracker transition: configure on_configure: lifecycle: component: bounding_box_tracker transition: activate parameters: rate: value: 500 type: double inputs: detections: /yolo_executor/detections outputs: twist: /yolo_to_marker/twist hardware: hardware: display_name: Hardware Interface urdf: Universal Robots 5e rate: 500 events: transitions: on_load: load: - controller: robot_state_broadcaster hardware: hardware - controller: joint_trajectory_controller hardware: hardware - controller: ur_dashboard_controller hardware: hardware - controller: ik_velocity_controller hardware: hardware parameters: headless_mode: "true" robot_ip: 192.168.0.10 script_filename: /ws/install/ur_client_library/share/ur_client_library/resources/external_control.urscript controllers: robot_state_broadcaster: plugin: aica_core_controllers/RobotStateBroadcaster events: transitions: on_load: switch_controllers: hardware: hardware activate: robot_state_broadcaster joint_trajectory_controller: plugin: aica_core_controllers/trajectory/JointTrajectoryController events: predicates: has_trajectory_succeeded: call_service: controller: ur_dashboard_controller hardware: hardware service: hand_back_control transitions: on_activate: sequence: start: sequence ur_dashboard_controller: plugin: aica_ur_controllers/URDashboardController events: predicates: program_running: switch_controllers: hardware: hardware activate: joint_trajectory_controller hand_back_control_success: application: stop transitions: on_load: switch_controllers: hardware: hardware activate: ur_dashboard_controller ik_velocity_controller: plugin: aica_core_controllers/velocity/IKVelocityController inputs: command: /yolo_to_marker/twist events: transitions: on_load: switch_controllers: hardware: hardware activate: ik_velocity_controller graph: positions: on_start: x: -20 y: -360 stop: x: -20 y: -260 components: yolo_executor: x: 740 y: -180 camera_streamer: x: 200 y: -300 bounding_box_tracker: x: 1400 y: 180 hardware: hardware: x: 1940 y: -360 edges: yolo_to_marker_marker_pose_signal_point_attractor_attractor: path: - x: 1360 y: 520 - x: 1360 y: 680 yolo_executor_detections_yolo_to_marker_json_input: path: - x: 1160 y: 120 - x: 1160 y: 220 - x: 860 y: 220 - x: 860 y: 520 yolo_to_marker_twist_hardware_hardware_ik_velocity_controller_command: path: - x: 1820 y: 380 - x: 1820 y: 420 yolo_executor_detections_yolo_to_marker_detections: path: - x: 1200 y: 120 - x: 1200 y: 380 on_start_on_start_camera_streamer_camera_streamer: path: - x: 140 y: -300 - x: 140 y: -240 yolo_executor_on_activate_bounding_box_tracker_bounding_box_tracker: path: - x: 1300 y: 0 - x: 1300 y: 240 hardware_hardware_joint_trajectory_controller_has_trajectory_succeeded_hardware_hardware_ur_dashboard_controller_hand_back_control: path: - x: 1920 y: 400 - x: 1920 y: 900 hardware_hardware_ur_dashboard_controller_program_running_hardware_hardware_joint_trajectory_controller: path: - x: 1920 y: 820 - x: 1920 y: 240 hardware_hardware_ur_dashboard_controller_hand_back_control_success_on_stop_on_stop: path: - x: -40 y: 780 - x: -40 y: -200 camera_streamer_image_yolo_executor_image: path: - x: 640 y: -40 - x: 640 y: 120 yolo_executor_detections_bounding_box_tracker_detections: path: - x: 1220 y: 120 - x: 1220 y: 400 bounding_box_tracker_twist_hardware_hardware_ik_velocity_controller_command: path: - x: 1860 y: 400 - x: 1860 y: 1120 ``` ### Programme UR5e avec YOLO et Bounding Box - Dans RViz afficher le collision box marker, cf. [https://docs.aica.tech/core/examples/core-components/colliders#box-collider-example](https://docs.aica.tech/core/examples/core-components/colliders#box-collider-example) ```yaml schema: 2-0-6 dependencies: core: v4.0.0 frames: start: reference_frame: world position: x: 0.016268 y: 0.460877 z: 0.574409 orientation: w: 0.000502 x: 0.999979 y: -0.005594 z: -0.003165 on_start: load: - component: frame_broadcaster - hardware: hardware sequence: start: sequence sequences: sequence: display_name: Sequence steps: - check: condition: controller: joint_trajectory_controller hardware: hardware predicate: has_trajectory_succeeded wait_forever: true - call_service: controller: ur_dashboard_controller hardware: hardware service: zero_ftsensor - check: condition: controller: ur_dashboard_controller hardware: hardware predicate: zero_ftsensor_success wait_forever: true - switch_controllers: hardware: hardware deactivate: joint_trajectory_controller components: frame_broadcaster: component: aica_core_components::ros::StaticFrameBroadcaster display_name: Frame Broadcaster parameters: frame: value: camera_link type: string reference_frame: value: ur_tool0 type: string pose_values: value: - -0.02 - -0.11752 - 0.032 - 1 - 0 - 0 - 0 type: double_array broadcast_periodically: value: true type: bool yolo_executor: component: advanced_perception::object_detection::YoloExecutor display_name: YOLO Executor events: transitions: on_load: lifecycle: component: yolo_executor transition: configure on_configure: lifecycle: component: yolo_executor transition: activate on_activate: load: component: bounding_box_tracker parameters: rate: value: 30 type: double model_file: value: /data/models/yolo12n.onnx type: string classes_file: value: /data/models/coco.yaml type: string object_class: value: - scissors type: string_array conf_threshold: value: 0.4 type: double inputs: image: /camera_streamer/image outputs: detections: /yolo_executor/detections bounding_box_tracker: component: object_detection_utils::BoundingBoxTracker display_name: Bounding box tracker events: transitions: on_load: lifecycle: component: bounding_box_tracker transition: configure on_configure: lifecycle: component: bounding_box_tracker transition: activate parameters: rate: value: 100 type: double gains: value: - 0.008 - 0.008 type: double_array decay_rate: value: 8 type: double reference_frame: value: world type: string inputs: detections: /yolo_executor/detections outputs: twist: /bounding_box_tracker/twist box_collider: component: aica_core_components::utility::BoxCollider display_name: Box Collider events: predicates: is_out_of_bounds: set: parameter: gains value: - 0 - 0 type: double_array component: bounding_box_tracker is_in_bounds: set: parameter: gains value: - 0.008 - 0.008 type: double_array component: bounding_box_tracker transitions: on_load: lifecycle: component: box_collider transition: configure on_configure: lifecycle: component: box_collider transition: activate parameters: x_size: value: 0.8 type: double y_size: value: 0.3 type: double z_size: value: 0.5 type: double inputs: target: /hardware/robot_state_broadcaster/cartesian_state center: /frame_to_signal/pose frame_to_signal: component: aica_core_components::ros::TfToSignal display_name: Frame to Signal events: transitions: on_load: lifecycle: component: frame_to_signal transition: configure on_configure: lifecycle: component: frame_to_signal transition: activate on_activate: load: component: box_collider parameters: frame: value: start type: string outputs: pose: /frame_to_signal/pose camera_streamer: component: core_vision_components::image_streaming::CameraStreamer display_name: Camera Streamer events: transitions: on_load: load: - component: yolo_executor - component: frame_to_signal lifecycle: component: camera_streamer transition: configure on_configure: lifecycle: component: camera_streamer transition: activate outputs: image: /camera_streamer/image hardware: hardware: display_name: Hardware Interface urdf: Universal Robots 5e rate: 500 events: transitions: on_load: load: - controller: robot_state_broadcaster hardware: hardware - controller: joint_trajectory_controller hardware: hardware - controller: ur_impedance_controller hardware: hardware - controller: ur_dashboard_controller hardware: hardware parameters: robot_ip: 192.168.56.101 controllers: ur_dashboard_controller: plugin: aica_ur_controllers/URDashboardController events: transitions: on_load: switch_controllers: hardware: hardware activate: ur_dashboard_controller joint_trajectory_controller: plugin: aica_core_controllers/trajectory/JointTrajectoryController events: transitions: on_load: switch_controllers: hardware: hardware activate: joint_trajectory_controller on_deactivate: load: component: camera_streamer switch_controllers: hardware: hardware activate: ur_impedance_controller on_activate: call_service: controller: joint_trajectory_controller hardware: hardware service: set_trajectory payload: |- frames: - start durations: - 2.0 robot_state_broadcaster: plugin: aica_core_controllers/RobotStateBroadcaster outputs: cartesian_state: /hardware/robot_state_broadcaster/cartesian_state ft_sensor: /hardware/robot_state_broadcaster/ft_sensor events: transitions: on_load: switch_controllers: hardware: hardware activate: robot_state_broadcaster ur_impedance_controller: plugin: aica_ur_controllers/URImpedanceController parameters: selection_vector: value: - 1 - 1 - 1 - 0 - 0 - 1 type: int_array force_limit: value: - 40 - 40 - 40 - 30 - 30 - 30 type: vector stiffness: value: - 500 - 500 - 500 - 400 - 400 - 400 type: vector damping: value: - 50 - 50 - 50 - 10 - 10 - 10 type: vector inputs: command: /bounding_box_tracker/twist graph: positions: on_start: x: -740 y: -360 stop: x: -740 y: -260 components: frame_broadcaster: x: -420 y: -580 yolo_executor: x: 760 y: 480 bounding_box_tracker: x: 1300 y: 600 box_collider: x: 840 y: 1020 frame_to_signal: x: 280 y: 1140 camera_streamer: x: 180 y: 520 hardware: hardware: x: 1880 y: -360 sequences: sequence: x: -420 y: -280 edges: yolo_to_marker_marker_pose_signal_point_attractor_attractor: path: - x: 1360 y: 520 - x: 1360 y: 680 yolo_executor_detections_yolo_to_marker_json_input: path: - x: 1160 y: 120 - x: 1160 y: 220 - x: 860 y: 220 - x: 860 y: 520 yolo_to_marker_twist_hardware_hardware_ik_velocity_controller_command: path: - x: 1740 y: 680 - x: 1740 y: 920 yolo_to_marker_twist_hardware_hardware_velocity_impedance_controller_command: path: - x: 1740 y: 680 - x: 1740 y: 920 hardware_hardware_robot_state_broadcaster_ft_sensor_hardware_hardware_velocity_impedance_controller_ft_sensor: path: - x: 1840 y: 700 - x: 1840 y: 960 hardware_hardware_ur_dashboard_controller_zero_ftsensor_success_sequence_sequence_condition_input_2: path: - x: -60 y: 80 yolo_to_marker_on_activate_hardware_hardware_ur_impedance_controller: path: - x: 1840 y: 700 - x: 1840 y: 1060 yolo_to_marker_twist_hardware_hardware_ur_impedance_controller_command: path: - x: 1740 y: 780 - x: 1740 y: 1220 orbbec_camera_on_load_yolo_executor_yolo_executor: path: - x: 680 y: 620 - x: 680 y: 540 orbbec_camera_on_load_frame_to_signal_frame_to_signal: path: - x: 680 y: 620 - x: 680 y: 1020 - x: 240 y: 1020 - x: 240 y: 1200 orbbec_camera_color_image_yolo_executor_image: path: - x: 640 y: 700 - x: 640 y: 780 on_start_on_start_frame_broadcaster_frame_broadcaster: path: - x: -540 y: -300 - x: -540 y: -520 on_start_on_start_sequence_sequence: path: - x: -540 y: -300 - x: -540 y: -220 hardware_joint_trajectory_controller_has_trajectory_succeeded_condition_sequence_sequence_condition_input_0: path: - x: -380 y: 440 sequence_sequence_event_trigger_1_hardware_hardware_ur_dashboard_controller_zero_ftsensor: path: - x: -220 y: 140 hardware_ur_dashboard_controller_zero_ftsensor_success_condition_sequence_sequence_condition_input_2: path: - x: -60 y: 60 sequence_sequence_event_trigger_3_hardware_hardware_joint_trajectory_controller: path: - x: 100 y: 200 box_collider_is_out_of_bounds_bounding_box_tracker_bounding_box_tracker: path: - x: 1400 y: 1280 - x: 1400 y: 1000 - x: 1280 y: 1000 - x: 1280 y: 660 box_collider_is_in_bounds_bounding_box_tracker_bounding_box_tracker: path: - x: 1360 y: 1240 - x: 1360 y: 1040 - x: 1260 y: 1040 - x: 1260 y: 660 frame_to_signal_on_activate_box_collider_box_collider: path: - x: 800 y: 1320 - x: 800 y: 1080 camera_streamer_on_load_yolo_executor_yolo_executor: path: - x: 620 y: 700 - x: 620 y: 540 camera_streamer_on_load_frame_to_signal_frame_to_signal: path: - x: 620 y: 700 - x: 620 y: 1060 - x: 260 y: 1060 - x: 260 y: 1200 hardware_hardware_joint_trajectory_controller_on_deactivate_camera_streamer_camera_streamer: path: - x: 100 y: 360 - x: 100 y: 580 hardware_hardware_joint_trajectory_controller_on_deactivate_hardware_hardware_ur_impedance_controller: path: - x: 1820 y: 360 - x: 1820 y: 1040 hardware_hardware_joint_trajectory_controller_on_activate_hardware_hardware_joint_trajectory_controller_set_trajectory: path: - x: 1800 y: 320 - x: 1800 y: 520 yolo_executor_detections_bounding_box_tracker_detections: path: - x: 1240 y: 780 - x: 1240 y: 820 bounding_box_tracker_twist_hardware_hardware_ur_impedance_controller_command: path: - x: 1760 y: 820 - x: 1760 y: 1200 hardware_hardware_robot_state_broadcaster_cartesian_state_box_collider_target: path: - x: 740 y: 940 - x: 740 y: 1360 ``` ### Programme UR5e avec Point Attractor et Bounding Box - Dans RViz afficher le collision box marker, cf. [https://docs.aica.tech/core/examples/core-components/colliders#box-collider-example](https://docs.aica.tech/core/examples/core-components/colliders#box-collider-example) ```yaml schema: 2-0-6 dependencies: core: v4.0.0 frames: start: reference_frame: world position: x: 0.016268 y: 0.460877 z: 0.574409 orientation: w: 0.000502 x: 0.999979 y: -0.005594 z: -0.003165 on_start: load: - component: frame_broadcaster - hardware: hardware sequence: start: sequence sequences: sequence: display_name: Sequence steps: - check: condition: controller: joint_trajectory_controller hardware: hardware predicate: has_trajectory_succeeded wait_forever: true - call_service: controller: ur_dashboard_controller hardware: hardware service: zero_ftsensor - check: condition: controller: ur_dashboard_controller hardware: hardware predicate: zero_ftsensor_success wait_forever: true - switch_controllers: hardware: hardware deactivate: joint_trajectory_controller components: frame_broadcaster: component: aica_core_components::ros::StaticFrameBroadcaster display_name: Frame Broadcaster parameters: frame: value: camera_link type: string reference_frame: value: ur_tool0 type: string pose_values: value: - -0.02 - -0.11752 - 0.032 - 1 - 0 - 0 - 0 type: double_array broadcast_periodically: value: true type: bool yolo_executor: component: advanced_perception::object_detection::YoloExecutor display_name: YOLO Executor events: transitions: on_load: lifecycle: component: yolo_executor transition: configure on_configure: lifecycle: component: yolo_executor transition: activate on_activate: load: component: bounding_box_tracker parameters: rate: value: 30 type: double model_file: value: /data/models/yolo12n.onnx type: string classes_file: value: /data/models/coco.yaml type: string object_class: value: - scissors type: string_array conf_threshold: value: 0.4 type: double inputs: image: /camera_streamer/image outputs: detections: /yolo_executor/detections bounding_box_tracker: component: object_detection_utils::BoundingBoxTracker display_name: Bounding box tracker events: transitions: on_load: lifecycle: component: bounding_box_tracker transition: configure on_configure: lifecycle: component: bounding_box_tracker transition: activate parameters: rate: value: 100 type: double gains: value: - 0.008 - 0.008 type: double_array decay_rate: value: 8 type: double reference_frame: value: world type: string inputs: detections: /yolo_executor/detections outputs: twist: /bounding_box_tracker/twist box_collider: component: aica_core_components::utility::BoxCollider display_name: Box Collider events: predicates: is_out_of_bounds: set: parameter: gains value: - 0 - 0 type: double_array component: bounding_box_tracker is_in_bounds: set: parameter: gains value: - 0.008 - 0.008 type: double_array component: bounding_box_tracker transitions: on_load: lifecycle: component: box_collider transition: configure on_configure: lifecycle: component: box_collider transition: activate parameters: x_size: value: 0.8 type: double y_size: value: 0.3 type: double z_size: value: 0.5 type: double inputs: target: /hardware/robot_state_broadcaster/cartesian_state center: /frame_to_signal/pose frame_to_signal: component: aica_core_components::ros::TfToSignal display_name: Frame to Signal events: transitions: on_load: lifecycle: component: frame_to_signal transition: configure on_configure: lifecycle: component: frame_to_signal transition: activate on_activate: load: component: box_collider parameters: frame: value: start type: string outputs: pose: /frame_to_signal/pose camera_streamer: component: core_vision_components::image_streaming::CameraStreamer display_name: Camera Streamer events: transitions: on_load: load: - component: yolo_executor - component: frame_to_signal lifecycle: component: camera_streamer transition: configure on_configure: lifecycle: component: camera_streamer transition: activate outputs: image: /camera_streamer/image hardware: hardware: display_name: Hardware Interface urdf: Universal Robots 5e rate: 500 events: transitions: on_load: load: - controller: robot_state_broadcaster hardware: hardware - controller: joint_trajectory_controller hardware: hardware - controller: ur_impedance_controller hardware: hardware - controller: ur_dashboard_controller hardware: hardware parameters: robot_ip: 192.168.56.101 controllers: ur_dashboard_controller: plugin: aica_ur_controllers/URDashboardController events: transitions: on_load: switch_controllers: hardware: hardware activate: ur_dashboard_controller joint_trajectory_controller: plugin: aica_core_controllers/trajectory/JointTrajectoryController events: transitions: on_load: switch_controllers: hardware: hardware activate: joint_trajectory_controller on_deactivate: load: component: camera_streamer switch_controllers: hardware: hardware activate: ur_impedance_controller on_activate: call_service: controller: joint_trajectory_controller hardware: hardware service: set_trajectory payload: |- frames: - start durations: - 2.0 robot_state_broadcaster: plugin: aica_core_controllers/RobotStateBroadcaster outputs: cartesian_state: /hardware/robot_state_broadcaster/cartesian_state ft_sensor: /hardware/robot_state_broadcaster/ft_sensor events: transitions: on_load: switch_controllers: hardware: hardware activate: robot_state_broadcaster ur_impedance_controller: plugin: aica_ur_controllers/URImpedanceController parameters: selection_vector: value: - 1 - 1 - 1 - 0 - 0 - 1 type: int_array force_limit: value: - 40 - 40 - 40 - 30 - 30 - 30 type: vector stiffness: value: - 500 - 500 - 500 - 400 - 400 - 400 type: vector damping: value: - 50 - 50 - 50 - 10 - 10 - 10 type: vector inputs: command: /bounding_box_tracker/twist graph: positions: on_start: x: -740 y: -360 stop: x: -740 y: -260 components: frame_broadcaster: x: -420 y: -580 yolo_executor: x: 760 y: 480 bounding_box_tracker: x: 1300 y: 600 box_collider: x: 840 y: 1020 frame_to_signal: x: 280 y: 1140 camera_streamer: x: 180 y: 520 hardware: hardware: x: 1880 y: -360 sequences: sequence: x: -420 y: -280 edges: yolo_to_marker_marker_pose_signal_point_attractor_attractor: path: - x: 1360 y: 520 - x: 1360 y: 680 yolo_executor_detections_yolo_to_marker_json_input: path: - x: 1160 y: 120 - x: 1160 y: 220 - x: 860 y: 220 - x: 860 y: 520 yolo_to_marker_twist_hardware_hardware_ik_velocity_controller_command: path: - x: 1740 y: 680 - x: 1740 y: 920 yolo_to_marker_twist_hardware_hardware_velocity_impedance_controller_command: path: - x: 1740 y: 680 - x: 1740 y: 920 hardware_hardware_robot_state_broadcaster_ft_sensor_hardware_hardware_velocity_impedance_controller_ft_sensor: path: - x: 1840 y: 700 - x: 1840 y: 960 hardware_hardware_ur_dashboard_controller_zero_ftsensor_success_sequence_sequence_condition_input_2: path: - x: -60 y: 80 yolo_to_marker_on_activate_hardware_hardware_ur_impedance_controller: path: - x: 1840 y: 700 - x: 1840 y: 1060 yolo_to_marker_twist_hardware_hardware_ur_impedance_controller_command: path: - x: 1740 y: 780 - x: 1740 y: 1220 orbbec_camera_on_load_yolo_executor_yolo_executor: path: - x: 680 y: 620 - x: 680 y: 540 orbbec_camera_on_load_frame_to_signal_frame_to_signal: path: - x: 680 y: 620 - x: 680 y: 1020 - x: 240 y: 1020 - x: 240 y: 1200 orbbec_camera_color_image_yolo_executor_image: path: - x: 640 y: 700 - x: 640 y: 780 on_start_on_start_frame_broadcaster_frame_broadcaster: path: - x: -540 y: -300 - x: -540 y: -520 on_start_on_start_sequence_sequence: path: - x: -540 y: -300 - x: -540 y: -220 hardware_joint_trajectory_controller_has_trajectory_succeeded_condition_sequence_sequence_condition_input_0: path: - x: -380 y: 440 sequence_sequence_event_trigger_1_hardware_hardware_ur_dashboard_controller_zero_ftsensor: path: - x: -220 y: 140 hardware_ur_dashboard_controller_zero_ftsensor_success_condition_sequence_sequence_condition_input_2: path: - x: -60 y: 60 sequence_sequence_event_trigger_3_hardware_hardware_joint_trajectory_controller: path: - x: 100 y: 200 box_collider_is_out_of_bounds_bounding_box_tracker_bounding_box_tracker: path: - x: 1400 y: 1280 - x: 1400 y: 1000 - x: 1280 y: 1000 - x: 1280 y: 660 box_collider_is_in_bounds_bounding_box_tracker_bounding_box_tracker: path: - x: 1360 y: 1240 - x: 1360 y: 1040 - x: 1260 y: 1040 - x: 1260 y: 660 frame_to_signal_on_activate_box_collider_box_collider: path: - x: 800 y: 1320 - x: 800 y: 1080 camera_streamer_on_load_yolo_executor_yolo_executor: path: - x: 620 y: 700 - x: 620 y: 540 camera_streamer_on_load_frame_to_signal_frame_to_signal: path: - x: 620 y: 700 - x: 620 y: 1060 - x: 260 y: 1060 - x: 260 y: 1200 hardware_hardware_joint_trajectory_controller_on_deactivate_camera_streamer_camera_streamer: path: - x: 100 y: 360 - x: 100 y: 580 hardware_hardware_joint_trajectory_controller_on_deactivate_hardware_hardware_ur_impedance_controller: path: - x: 1820 y: 360 - x: 1820 y: 1040 hardware_hardware_joint_trajectory_controller_on_activate_hardware_hardware_joint_trajectory_controller_set_trajectory: path: - x: 1800 y: 320 - x: 1800 y: 520 yolo_executor_detections_bounding_box_tracker_detections: path: - x: 1240 y: 780 - x: 1240 y: 820 bounding_box_tracker_twist_hardware_hardware_ur_impedance_controller_command: path: - x: 1760 y: 820 - x: 1760 y: 1200 hardware_hardware_robot_state_broadcaster_cartesian_state_box_collider_target: path: - x: 740 y: 940 - x: 740 y: 1360 ``` # Machine Learning LeRobot avec SO-ARM101 - Legacy #### Essai de déploiement sur Windows via WSL2, Docker, et Dev ContainerPour l'instant pas de test satisfaisant pour l'exécution d'un modèle sur le vrai robot. Passer au WSL2 les ports USB où sont connectés les robots et caméras fait crasher le conteneur. Probablement que la communication série n'est pas supporté.
- Cloner [https://github.com/huggingface/lerobot](https://github.com/huggingface/lerobot) dans un conteneur WSL2, par exemple Ubuntu - Depuis le conteneur Ubuntu, ouvrir un Terminal, se placer dans le répertoire cloné `cd ~/lerobot_devcontainer` , et lancer Visual Studio Code en tapant `code .` - Ajouter un répertoire `~/lerobot_devcontainer/.devcontainer` et un fichier dedans `~/lerobot_devcontainer/.devcontainer/devcontainer.json` contenant : ``` { "build": { // Path is relative to the devcontainer.json file. "dockerfile": "../docker/lerobot-gpu-dev/Dockerfile" }} ``` - Lancer la commande VSCode : Reopen in container Tentatives pour faire passer le port série à WSL2 : ```powershell wsl --shutdown winget install --interactive --exact dorssel.usbipd-win usbipd list wmic diskdrive list brief wsl --mount \\.\PHYSICALDRIVE1 wsl.exe --version wsl --mount \\.\PHYSICALDRIVE1 --bare wsl --mount \\.\PHYSICALDRIVE1 --partition 2 --type ext4 wsl --shutdown ipconfig net localgroup docker-users "gauthier.hentz" /ADD wsl --set-default ubuntu wsl --shutdown usbipd list usbipd bind --busid 1-1 usbipd list usbipd attach --wsl --busid 1-1 usbipd attach --wsl --busid 2-1 ``` ### Visualiser et rejouer des DataSets (avant hardware refactor) - Visualiser un DataSet python lerobot/scripts/visualize\_dataset.py --repo-id lerobot/pusht --root ./my\_local\_data\_dir --local-files-only 1 --episode-index 0 ``` python lerobot/scripts/visualize_dataset_html.py \ --repo-id cadene/act_so100_5_lego_test_080000 \ --local-files-only 1 ``` - Rejouer un DataSet (ou une évaluation de modèle) sur le robot ``` python lerobot/scripts/control_robot.py \ --robot.type=so101 \ --control.type=replay \ --control.fps=30 \ --control.repo_id=cadene/act_so100_5_lego_test_080000 \ --control.episode=0 ``` - Rejouer la Policy `cadene/act_so100_5_lego_test_080000` du modèle ACT pour le SO-ARM101 - En sauvegardant l'évaluation dans `outputs/eval/act_so100_5_lego_test_080000_haguenau` ``` python lerobot/scripts/control_robot.py \ --robot.type=so101 \ --control.type=record \ --control.fps=30 \ --control.single_task="Grasp a lego block and put it in the bin." \ --control.repo_id=outputs/eval/act_so100_5_lego_test_080000_haguenau \ --control.tags='["tutorial"]' \ --control.warmup_time_s=5 \ --control.episode_time_s=30 \ --control.reset_time_s=30 \ --control.num_episodes=10 \ --control.push_to_hub=false \ --control.policy.path=cadene/act_so100_5_lego_test_080000 ```