# 3 - ROS2 - Manipulation Mobile
# Assemblage du Turtlebot et OpenManipulator-X et configuration initiale
https://www.classes.cs.uchicago.edu/archive/2022/fall/20600-1/turtlebot\_assembly\_setup.html
## A Word of Caution
---
**This page is NOT intended for student use**. This page is designed for course staff to build and maintaing the turtlebots. **If you are a student, please ensure you have permission from course staff before making any of the changes detailed on this page to any of the turtlebots**.
## Setup Checklist
---
- [Turtlebot Assembly Tips](https://www.classes.cs.uchicago.edu/archive/2022/fall/20600-1/turtlebot_assembly_setup.html#assembly)
- [Turtlebot3](https://www.classes.cs.uchicago.edu/archive/2022/fall/20600-1/turtlebot_assembly_setup.html#assembly-tb3)
- [OpenMANIPULATOR Arm](https://www.classes.cs.uchicago.edu/archive/2022/fall/20600-1/turtlebot_assembly_setup.html#assembly-omx)
- [OpenMANIPULATOR Arm First-Time Configuration](https://www.classes.cs.uchicago.edu/archive/2022/fall/20600-1/turtlebot_assembly_setup.html#arm-first-time)
- [Connecting the Pi to a Wi-Fi Network](https://www.classes.cs.uchicago.edu/archive/2022/fall/20600-1/turtlebot_assembly_setup.html#wifi)
- [Assigning a Reserved IP Address](https://www.classes.cs.uchicago.edu/archive/2022/fall/20600-1/turtlebot_assembly_setup.html#reserved-ip)
- [Attaching/Detaching the OpenMANIPULATOR Arm](https://www.classes.cs.uchicago.edu/archive/2022/fall/20600-1/turtlebot_assembly_setup.html#arm)
- [Physical Attachment/Detachment](https://www.classes.cs.uchicago.edu/archive/2022/fall/20600-1/turtlebot_assembly_setup.html#arm-physical)
- [Updating Firmware and Files](https://www.classes.cs.uchicago.edu/archive/2022/fall/20600-1/turtlebot_assembly_setup.html#arm-firmware)
## Turtlebot Assembly Tips
---
### Turtlebot3
---
- DO NOT TIGHTEN the screws too much.
- Page 10: When connecting one pair of waffle-plates to another, make that the seams connecting each waffle-plate are parallel to one other.
- Page 17: When attaching the wheels to the dynamixels, do not tighten the screws too much.
- Page 28: Mount the LiDAR further up than the manual specifies so that the arm can fit on (see completed Turtlebots for reference).
### OpenMANIPULATOR Arm
---
- OpenMANIPULATOR Dynamixel 12: when putting the back piece onto the servo, you will need to break off a plastic piece where the cable should be threaded through.
- Make sure the placement of the marking on the servo horns is identical to the diagram PRIOR to screwing anything down onto it.
## OpenMANIPULATOR Arm First-Time Configuration
---
After assembling an OpenMANIPULATOR arm, its servos must first be configured properly before it can be used. By default, all the arm motors are set to the same ID (1) and the wrong baud rate, which causes collisions when trying to detect them.
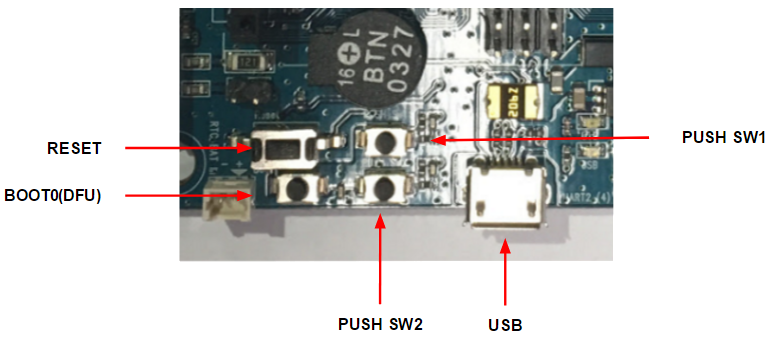
- Setup OpenCR with Arduino IDE using [OpenCR 1.0 manual, “Arduino IDE” section](https://emanual.robotis.com/docs/en/parts/controller/opencr10/#install-on-linux)
- Download [Dynamixel Wizard 2.0](https://emanual.robotis.com/docs/en/software/dynamixel/dynamixel_wizard2/) if not already installed.
1. Connect a **SINGLE** motor (no daisy-chains in the arm) to the OpenCR module and **DISCONNECT ALL OTHER MOTORS** (the wheel motors!!)
2. Open up Dynamixel Wizard 2.0 and update the firmware for that motor by following [this tutorial](https://www.youtube.com/watch?v=FAnVIE_23AA). The arm Dynamixel model is XM430-**W350**, and the wheel motors are XM430-**W210**.
3. Scan for connected Dynamixels using the “Scan” button on the top menu. If the scan does not turn up any results, you may need to change the scan options in the "Options" menu. By default, an unconfigured arm motor will have ID 1, be on Protocol 2.0, and have a baud rate of 57600 bps.
4. Change the ID for the detected motor from 1 to 11/12/13/14/15 (whichever you're doing the procedure for). Click on the “ID” item, and find the ID # you want in the lower right corner. Click it and press “Save”.
5. Change the baud rate to 1M (if not already 1M). Click on the “Baud Rate (Bus)” item, and find the 1 Mbps option. Click it and press “Save”.
6. Disconnect the motor (both in the wizard by clicking “Disconnect” up top and physically disconnecting from the board) and repeat the steps for the remaining ones.
## Attaching/Detaching the OpenMANIPULATOR Arm
---
### Physical Attachment/Detachment
---
Follow these steps below:
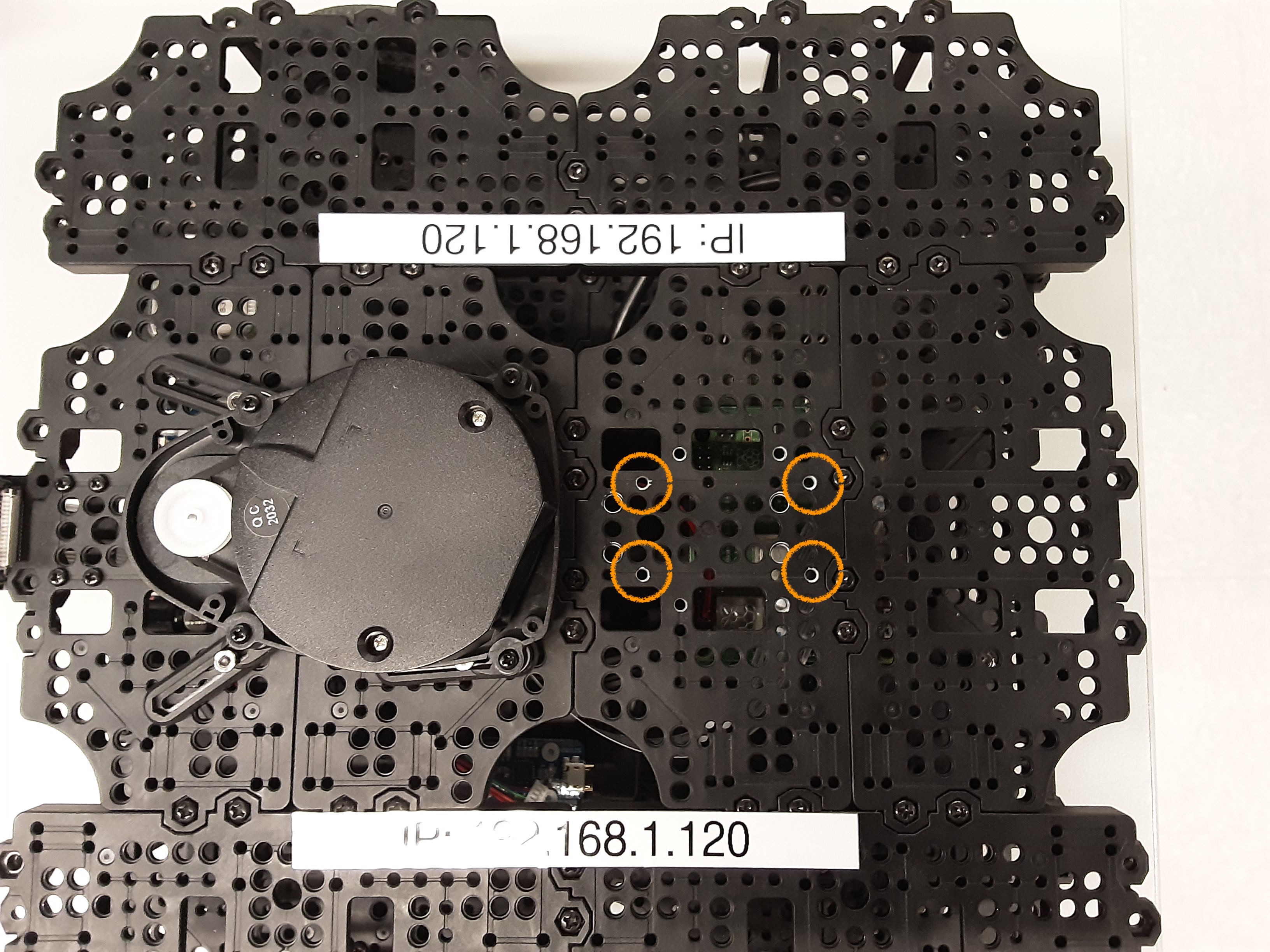
1. The arm can be attached and detached by first removing the top layer of the the Turtlebot. There are 10 screws around the perimeter of the top layer that you will need to remove with a Phillips head / cross screwdriver.
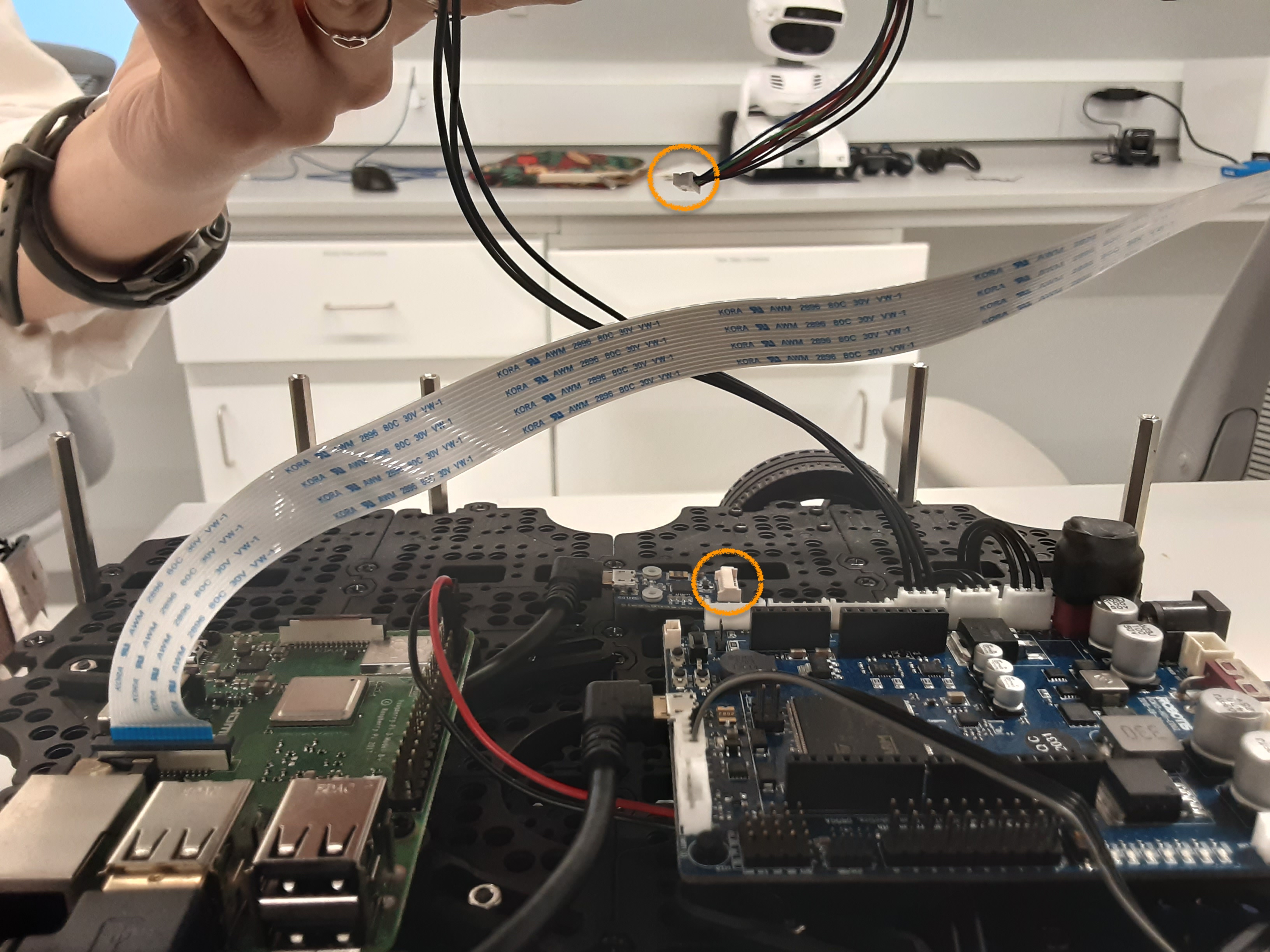
2. Once the top layer of the Turtlebot is loose, disconnect the cable that is attached to the LiDAR. This cable is multi-colored with several pins. Note: ONLY remove this LiDAR cable in this step.
Note: You can also set those environment variables in the command line by running: