Toujours la même erreur chez Wago. Ils appellent A -> Data+ et B -> Data- qui correspond à la dénomination Profibus de Siemens.
| Dimensions | 1019D x 1066H x 1225W mm |
| Leader Arms | WidowX 250 S - Aloha Version |
| Follower Arms | ViperX 300 S - Aloha Version |
| Camera | 2x Intel RealSense D405 |
| Chassis | Modular |
| Computer | Coming Soon |
| USB Hubs | Yes 1X |
Attention avant d'utiliser le robot avec ROS2, il faut avoir calibré les servomoteurs, par ex. avec le script de calibration du projet LeRobot
[https://github.com/JafarAbdi/ros2\_so\_arm100](https://github.com/JafarAbdi/ros2_so_arm100) [https://discourse.openrobotics.org/t/interactive-so-101-ik-in-ros-2-with-viser-robokin/53850](https://discourse.openrobotics.org/t/interactive-so-101-ik-in-ros-2-with-viser-robokin/53850) #### Jumeau numérique Pilotage de la simulation ou du vrai robot [https://github.com/tessel-la/robo-boy](https://github.com/tessel-la/robo-boy) Adapter le tuto suivant au SO-ARM100 : [https://innovation.iha.unistra.fr/books/robotique-open-source/page/programmer-un-robot-avec-moveit2-jumeau-numerique](https://innovation.iha.unistra.fr/books/robotique-open-source/page/programmer-un-robot-avec-moveit2-jumeau-numerique) #### Contrôle des moteurs par un GUI de "jogging" Joint Trajectory Controller `ros2 run rqt_joint_trajectory_controller rqt_joint_trajectory_controller` [https://github.com/tessel-la/robo-boy](https://github.com/tessel-la/robo-boy) #### Contrôle de l'outil sans collisions via le plugin MoveIt de RViz Cartesian Trajectory `ros2 launch so_arm100_moveit_config moveit_rviz.launch.py` #### Réalisation d'un programme en Python [https://moveit.picknik.ai/main/doc/examples/motion\_planning\_python\_api/motion\_planning\_python\_api\_tutorial.html#single-pipeline-planning-pose-goal](https://moveit.picknik.ai/main/doc/examples/motion_planning_python_api/motion_planning_python_api_tutorial.html#single-pipeline-planning-pose-goal) ``` # set plan start state to current state panda_arm.set_start_state_to_current_state() # set pose goal with PoseStamped message pose_goal = PoseStamped() pose_goal.header.frame_id = "panda_link0" pose_goal.pose.orientation.w = 1.0 pose_goal.pose.position.x = 0.28 pose_goal.pose.position.y = -0.2 pose_goal.pose.position.z = 0.5 panda_arm.set_goal_state(pose_stamped_msg=pose_goal, pose_link="panda_link8") # plan to goal plan_and_execute(panda, panda_arm, logger) ``` En utilisant l'environnement de développement Jupyter Notebook [https://moveit.picknik.ai/main/doc/examples/jupyter\_notebook\_prototyping/jupyter\_notebook\_prototyping\_tutorial.html](https://moveit.picknik.ai/main/doc/examples/jupyter_notebook_prototyping/jupyter_notebook_prototyping_tutorial.html) ### Pilotage du bras robot par LeRobot (IA, VR, etc.) Environnement Python sous Windows ou Linux #### Contrôle du bras par clavier ou manette Avec LeRobot+Phospho [https://docs.phospho.ai/basic-usage/teleop](https://docs.phospho.ai/basic-usage/teleop) ou avec ROS2+MoveIt2 [https://moveit.picknik.ai/main/doc/examples/jupyter\_notebook\_prototyping/jupyter\_notebook\_prototyping\_tutorial.html](https://moveit.picknik.ai/main/doc/examples/jupyter_notebook_prototyping/jupyter_notebook_prototyping_tutorial.html) #### Contrôle du bras par Oculus Quest Compatible LeRobot (WIndows et Ubuntu) : - alternative gratuite et open source à phospho - [https://github.com/vladfatu/telerobot](https://github.com/vladfatu/telerobot) Depuis Windows : - Appli Oculus Phospho [https://docs.phospho.ai/examples/teleop](https://docs.phospho.ai/examples/teleop) - 222€ [https://www.meta.com/en-gb/experiences/phospho-teleoperation/8873978782723478/](https://www.meta.com/en-gb/experiences/phospho-teleoperation/8873978782723478/) Depuis Ubuntu avec ROS2 et moveit\_servo : - [https://github.com/ZorAttC/franka\_vr](https://github.com/ZorAttC/franka_vr) - [https://moveit.picknik.ai/main/doc/examples/realtime\_servo/realtime\_servo\_tutorial.html](https://moveit.picknik.ai/main/doc/examples/realtime_servo/realtime_servo_tutorial.html) - [https://github.com/rail-berkeley/oculus\_reader](https://github.com/rail-berkeley/oculus_reader) - Enable Oculus Quest development mode - Always allow USB debugging from this computer - Connexion USB (ADB) ou wifi Autre : [https://github.com/lts0429/teleoperation](https://github.com/lts0429/teleoperation) #### Contrôle du bras via un modèle d'IA [https://docs.phospho.ai/basic-usage/inference](https://docs.phospho.ai/basic-usage/inference) - Créer un compte huggingface.ia - Sign In dans phosphobot - Dans les paramètres, ajouter la clé d'API huggingface - Par défaut l'inférence du modèle d'IA qui permet de piloter le robot depuis l'image des caméras tournera sur un GPU sur les serveurs de huggingface ou phospho - On peut faire tourner l'inférence du modèle d'IA sur le PC local s'il a une bonne carte graphique NVidia - Suivre ces instructions : [https://github.com/phospho-app/phosphobot/tree/main/inference#setup-a-server](https://github.com/phospho-app/phosphobot/tree/main/inference#setup-a-server) - Démarrer le serveur d'inférence uv - `uv run ACT/server.py --model_id=Avantages
- Câble plus fin, plus souple, moins coûteux. - Connecteur simplifié, meilleur marché, plus vite monté. - Plus de problème de synchronisation de signaux - On ne transmet qu’un seul signal. Seules les horloges doivent être de fréquence très voisine, ce qui n’est pas difficile en électronique. - Isolation diaphonique. - Plus de risque d’interférence entre signaux, il n’y a qu’un seul signal. - Utilisable sur des longueurs nettement plus importantes (km).Inconvénients
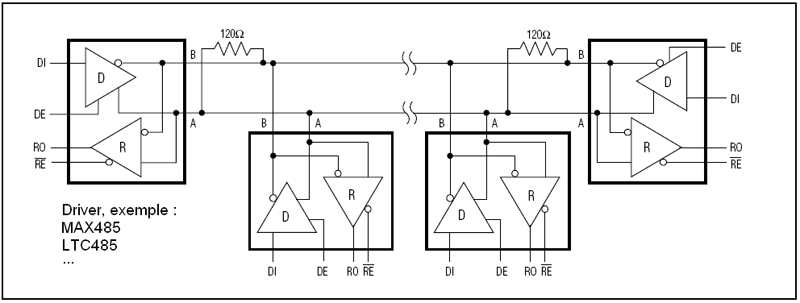
- Débit - A une même fréquence, on transporte un seul bit à la fois. - Electronique plus compliquée du côté émetteur et encore plus compliquée côté récepteur (synchronisation d’horloge). - UART : Universal Asynchronous Receiver Transmitter. - L’UART peut être désynchronisé, l’information reçue est alors invalide. ### Transmission série synchrone ### Transmission série asynchrone Exemple : port série RS232 du PC Exemple d’un adapteur FTDI USB-RS232 [](https://innovation.iha.unistra.fr/uploads/images/gallery/2025-05/x3simage.png)[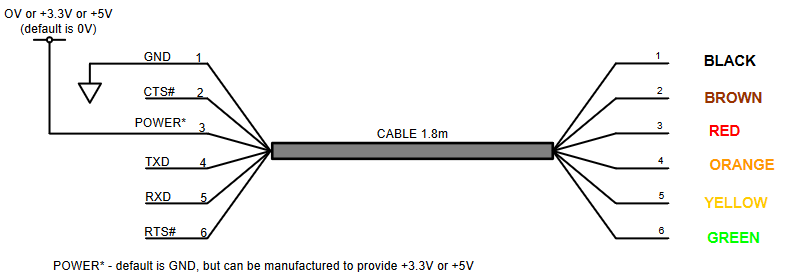](https://innovation.iha.unistra.fr/uploads/images/gallery/2025-05/qJeimage.png) ### Transmission série asynchrone TTL Exemple de trame série (TTL) ‘1’ logique = +5V ‘0’ logique = 0V [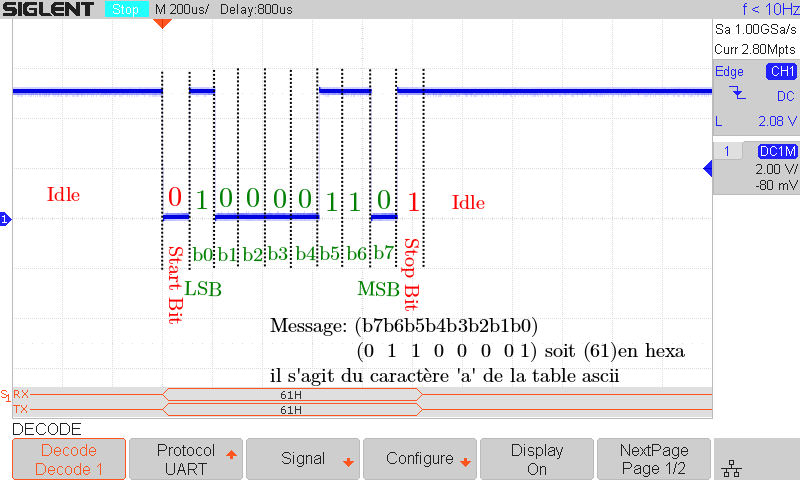](https://innovation.iha.unistra.fr/uploads/images/gallery/2025-05/I5Simage.png) ### Transmission série asynchrone RS485 vs RS232 [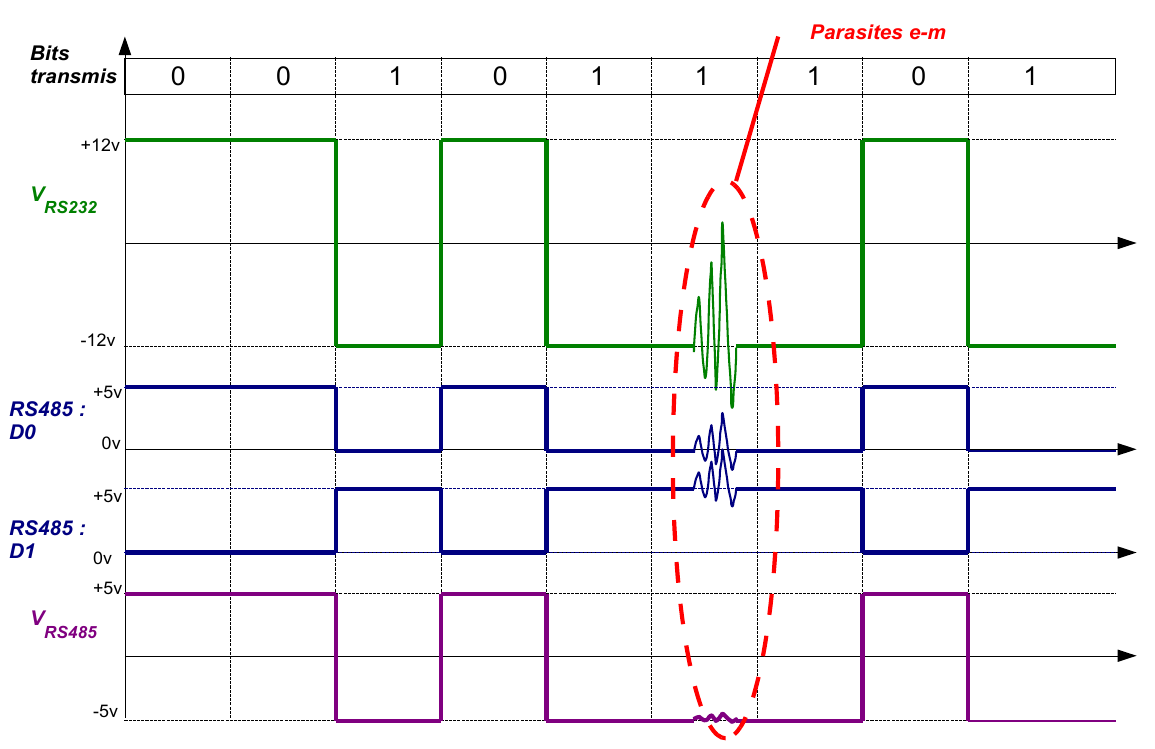](https://innovation.iha.unistra.fr/uploads/images/gallery/2025-05/yBQimage.png) ### Transmission série asynchrone RS485 [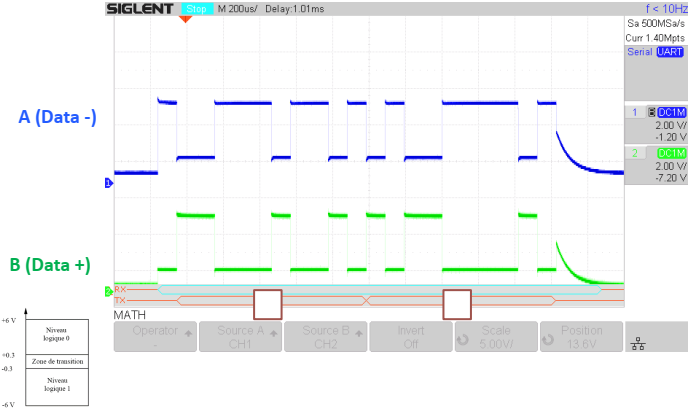](https://innovation.iha.unistra.fr/uploads/images/gallery/2025-05/Knfimage.png) ### Liaisons multipoints [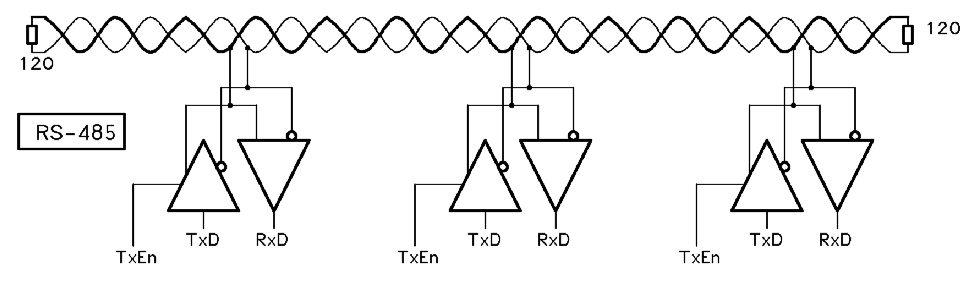](https://innovation.iha.unistra.fr/uploads/images/gallery/2025-05/fkNimage.png)Penser aux résistances de Terminaison de 120 Ω au début et à la fin de la liaison RS485.
[](https://innovation.iha.unistra.fr/uploads/images/gallery/2025-05/Qe8image.png) [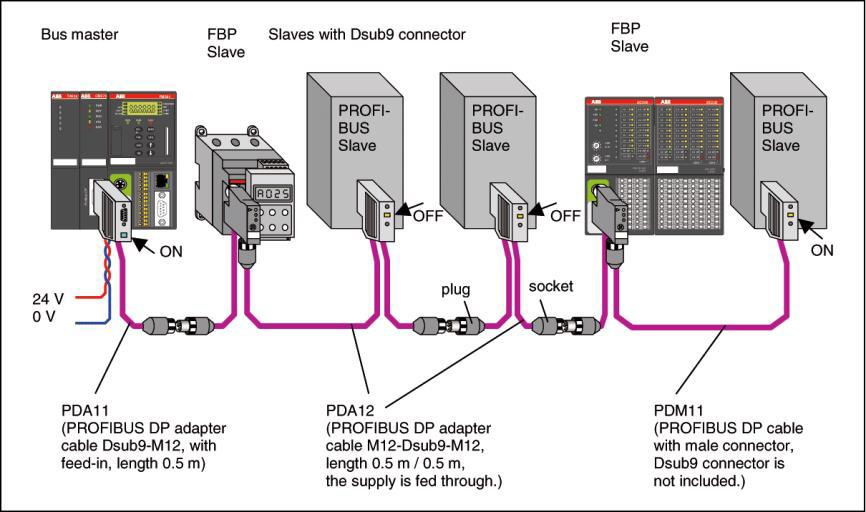](https://innovation.iha.unistra.fr/uploads/images/gallery/2025-05/F4Simage.png) ### Half Duplex Définition - Liaison bidirectionnelle. - 1 canal de transmission est partagé : - Il est utilisé dans un sens et dans l’autre. - Une règle doit définir comment gérer l’accès au média. - Moins cher, plus facile, mais plus lent. Exemple - De nombreux bus de terrain, RS485, [](https://innovation.iha.unistra.fr/uploads/images/gallery/2025-05/PAWimage.png) ### Topologie : Bus Principe - Connections de toutes les stations sur un même câble - Toujours half duplex. - 2 topologies selon les possibilités techniques - connexion en T "par prise vampire" [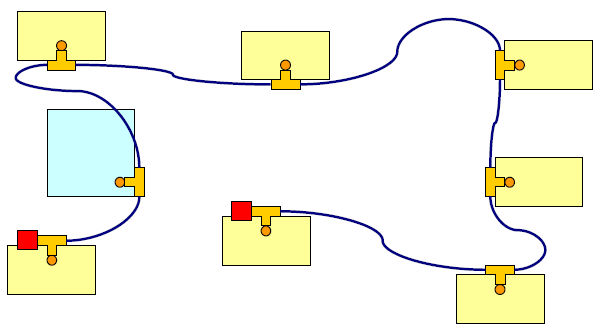](https://innovation.iha.unistra.fr/uploads/images/gallery/2025-05/O7Mimage.png) - - chaînage [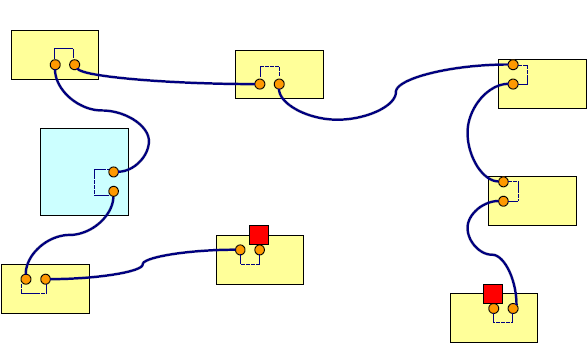](https://innovation.iha.unistra.fr/uploads/images/gallery/2025-05/udMimage.png) Avantages - Simplicité d’adjonction de stations. - Fonctionne même en cas de panne d’une station. - Transmission en diffusion ( broadcasting , multicasting - Longueur de câble réduite. Inconvénients - 1 seule station peut émettre à la fois. - Les résistances de terminaison sont externes (à câbler). - Liaison en chaîne : échange d’appareil impossible sans arrêt du système. - Liaison en T : coûts de connexion plus importants. Exemples - Connexion en prise vampire : ASi - Profibus, Modbus Source : Cours IUT Haguenau - Département GEII - Automatisme Spé. 4 - Réseaux Locaux Industriels - Philippe Celka, le 28.02.2022 Philippe Celka Copyright © 2025 CC Attribution-Non Commercial-Share Alike 4.0 International # Introduction à Modbus ## Protocole Modbus| 0 | From 1 to 247 | From 248 to 255 |
|---|---|---|
| Broadcast address | Slave individual addresses | Reserved |
| Type d’objet | Accès | Exemple | |
|---|---|---|---|
| Discrete Input | bit | Read-Only | Entrée TOR, fin de course, contact auxilliaire de disjoncteurs, … |
| Coil | bit | Read-Write | Sortie TOR, bit interne, RAZ d’un compteur d’énergie, … |
| Input Register | Word (16 bits) | Read-Only | Entrée analogique, lecture d’un capteur, … |
| Holding Register | Word (16 bits) | Read-Write | Sortie analogique, variable de programme (ex : temporisation, opérande d’un calcul,…) Valeur de paramétrage d’un équipement (ex: consigne de vitesse d’un variateur de fréquence,…) |
| Code | Hex | Nom de fonction | Commentaire |
|---|---|---|---|
| 02 | 0x02 | Read Discrete Inputs | Physical Discrete Inputs |
| 01 | 0x01 | Read Coils | Internal Bits or Physical coils |
| 05 | 0x05 | Write Single Coil | Internal Bits or Physical coils |
| 15 | 0x0F | Write Multiple Coils | Internal Bits or Physical coils |
| Code | Hex | Nom de fonction | Commentaire |
|---|---|---|---|
| 04 | 0x04 | Read Input Register | Physical Input Registers |
| 03 | 0x03 | Read Holding Registers | Internal Registers or Physical Output Registers |
| 06 | 0x06 | Write Single Register | Internal Registers or Physical Output Registers |
| 16 | 0x10 | Write Multiple Registers | Internal Registers or Physical Output Registers |
| Modbus Name | RS-485 Name | Autre Nom | Description |
|---|---|---|---|
| D1 | B | D+ ou Data+ | Transceiver Terminal 1 (V1>V0 for binary 1 \[OFF\] state) |
| D0 | A | D- ou Data- | Transceiver Terminal 0 (V0>V1 for binary 0 \[ON\] state) |
| Common | C | 0v ou GND | Commun, Masse (0V) |
| PFC200 WAGO | Connecteur DB9 |
|---|---|
| Contact | Signal RS-485 | Description |
|---|---|---|
| 1 | NC | Not assigned |
| 2 | NC | Not assigned |
| 3 | A (Tx/Rx+) | Transmitt/receive Data+ |
| 4 | NC | Not assigned |
| 5 | FB\_GND | Ground |
| 6 | FB\_5V | Power Supply |
| 7 | NC | Not assigned |
| 8 | B (Tx/Rx-) | Transmitt/receive Data- |
| 9 | NC | Not assigned |
| Housing | Shield | Shield |
| Pin | Function |
|---|---|
| 1 | Ub |
| 2 | Ub |
| 3 | n.c. |
| 4 | A (Data+) |
| 5 | B (Data-) |
| 6 | n.c. |
| 7 | GND |
| 8 | GND |
| Pin on RJ45 | Pin on DB9 | Level of requirement | Modbus | RS-485 | Description |
|---|---|---|---|---|---|
| 3 | 3 | optional | PMC | - | Port Mode Control |
| 4 | 5 | **required** | D1 | B | Transceiver terminal 1, V1 Voltage (V1>V0 for binary 1 \[OFF\] state) |
| 5 | 9 | **required** | D0 | A | Transceiver terminal 0, V0 Voltage (V0>V1 for binary 0 \[ON\] state) |
| 7 | 2 | recommended | VP | - | Positive 5..24 Vdc Power Supply |
| 8 | 1 | **required** | Common | C | Signal and Power Supply Common |
| Capteur PKTH100B-CZ1 | FTDI USB-RS485 | Oscilloscope |
|---|---|---|
| Signal | Couleur de fil |
|---|---|
| GND | Noir |
| (A) Data - | Jaune |
| +5V | Rouge |
| R de 120Ω pin 1 | Brun |
| (B) Data + | Orange |
| R de 120Ω pin 2 | Vert |
| Terminals number | 1 | 2 | 3 | 4 |
|---|---|---|---|---|
| Identifying | GND | VCC | B | A |
| Description | Power- | Power+ | RS485- | RS485+ |
| Gestionnaire de périphériques | Config Serial dans QModMaster |
|---|---|
| QModMaster | Bus Monitor |
|---|---|