Calibration de la caméra
https://docs.nav2.org/tutorials/docs/camera_calibration.html
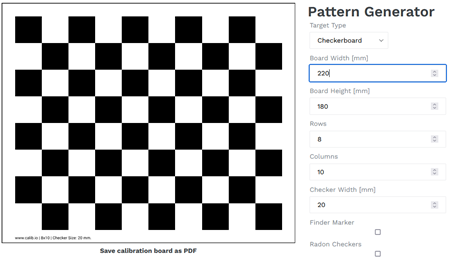
Générer un damier de calibration : 8 x 10 carrés de 20m
avec
https://calib.io/pages/camera-calibration-pattern-generator
Ce sont les sommets intérieurs des carrés qui sont utilisés, donc 7x9 sommets
Ressources
Noeud ROS2 pour Raspberry Cam
https://github.com/christianrauch/camera_ros
https://index.ros.org/p/camera_ros/
https://medium.com/swlh/raspberry-pi-ros-2-camera-eef8f8b94304
Revision #3
Created 11 October 2024 09:35:22 by admin_idf
Updated 24 October 2024 12:04:10 by admin_idf