
Mode opératoire APAS - Les bases
Présentation APAS :
Démarrage
| Étape |
Manière de procéder |
Graphique / Élément de commande |
| 1 | Relâcher les 2 boutons d’arrêt d’urgence en les tournant dans le sens horaire :
|
|
| 2 |
Tourner l’interrupteur principal électrique en Position I |
|
| 3 |
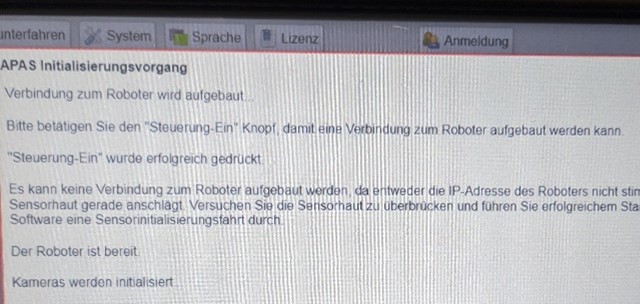
Attendre l’ouverture du logiciel de programmation du robot et le message demandant l’allumage du contrôleur du robot « Steuerung-Ein ». Traduction :
Procédure d’initialisation APAS
Si le message « es kann keine Verbindung zuum Roboter aufgebaut werden… » apparaît, c’est sûrement que le bouton d’acquittement n’a pas été maintenu actif pendant l’initialisation |
|
| 4 |
Appuyer sur le Bouton d’acquittement pendant la phase d’initialisation du robot (calibrage caméra et peau).
Ce bouton a trois positions :
|
|
| 5 |
Démarrer le contrôleur du robot sur le Panneau de commande lorsque demandé pendant la phase d’initialisation « Steuerung Ein ». Rester appuyer 1 à 2 secondes. Le bouton d’acquittement doit être activé car la peau capacitive n’est pas encore active. |
|
| 6 |
Code couleur voyant sécurité :
|
|
| 7 |
Interrupteur à clé « Freigabe Sonderfunktion » (Autorisation fonction spéciale)
Pour ponter les dispositifs de protection :
|
|





Elements de commande et d’affichage
P .64 APAS assistant i6 BA
Programmation manuelle basique
ATTENTION !
Risque d’écrasement entre les doigts de la pince ou les pièces prises
et les éléments fixes !
Les doigts de la pince et les pièces prises ne sont pas protégés par la
housse de protection. En cas de mouvements de rotation du bras du robot
ou de la tête APAS, des collisions avec les éléments fixes de la station
peuvent survenir. Ce qui entraîne le risque d’écorchures et de légères
contusions.
- En mode manuel ou en mode de réglage, l’APAS assistant ne doit être
commandé que par une personne autorisée. Celle-ci doit être
familiarisée avec le fonctionnement et connaître les dangers potentiels. - Équiper les zones comportant un risque de coincement de barrières
locales en fonction de l’application. - En cours de service, ne pas intervenir dans la zone d’opération des
doigts de la pince. - Sur des trajets > 50 mm, les doigts de la pince doivent être orientés
vers le bas.
Connexion en mode Ajusteur ou Administrateur nécessaire !
| Étape |
Manière de procéder |
Graphique / Élément de commande |
| 1 | Panneau de commande des mouvements du robot
|
|
| 2 | Définir l’orientation de la pince par rapport au sol :
|
|
| 3 | Commande des mouvements du robot dans le repère :
|
|
| 4 | Coordonnées du repère de l’outil (TCP Tool Center Point) |
|
| 5 | Cette zone affiche la valeur de translation (mm) et de rotation (°) que doit effectuer le robot. La valeur sélectionnée (en vert) peut se modifier à l’aide des touches situées juste en dessous. |
|
| 6 | Commande dans les repères intermédiaires de la chaîne cinématique du robot |
|
| 7 | Mouvement de translation du TCP dans le sens de la flèche (par ex. 1).
Le graphique montre la partie du bras du robot qui sera déplacée. |
|
| 8 | Mouvement de rotation du TCP dans le sens de la flèche (par ex. 2).
Le graphique montre la partie du bras du robot qui sera déplacée. |
|
| 9 | Commande dans le repère de la pince du robot :
Un panneau pour la translation et un autre pour la rotation |
|
| 10 | Ouverture / fermeture de la pince |
|
| 11 | Commutation entre mouvement de translation et rotation |
|
| 12 | Commande dans le repère de la bride du robot (TCP par défaut) |
|
| 13 | Commande des coordonnées articulaires du robot. On commande directement chacun des 6 moteurs en rotation. |
|













Programmation Automatique : Pick & Place
Programmation graphique :
|
|
|---|---|
| Sélection et Paramétrage de blocs prédéfinis | |
| Certains blocs d’action nécessitent un apprentissage pour la configuration de ses paramètres | |
Exemple du type d’approvisionnement en composants à manipuler avec la pince du robot (Pick & Place) :
|
|
Saisie d’un composant avec la pince :
|
|
Eteindre le robot
| **Appuyer sur la touche « Accoster position** **d’origine ».** **Une fenêtre de dialogue s’ouvre.** | |
|---|---|
| **Appuyer sur la touche « Démarrer ».** **Le déplacement en position d’origine est** **effectué.** | |
| Appuyer sur « Mettre à l’arrêt » et confirmer. Attendre que l’écran tactile et le contrôleur du robot soient éteints | |
| Couper le courant en tournant l’**interrupteur principal** en Position O | |
Configuration avancée
| Changer la langue en cliquant sur Langue / Sprache | |
|---|---|
| Passer en mode Ajusteur ou Administrateur. Pour pouvoir modifier les programmes | |
| Règle le pourcentage de vitesse d’exécution des programmes du robot, dit « Override ». Par ex. si vous avez défini un mouvement Cartésien droit à 20cm/s et que vous donnez un Override de 10%, la trajectoire sera exécutée par le contrôleur à une vitesse de 2cm/s | |
| [](https://wiki.arn-test.noho.st/uploads/images/gallery/2023-03/1-main-electrical-switch.png) | Pour comprendre les problèmes d’exécution du programme il faut ouvrir les messages de « log ». Après l’exécution d’un programme on peut supprimer les messages précédents. |
Révision #8
Créé 13 mars 2023 11:18:12 par apps_admin