
Assemblage et programmation de la poubelle à couvercle automatique
1. Utilisation du capteur à ultrasons HC-SR04
Objectif :
Gestion et programmation des capteurs/actionneurs de la poubelle à couvercle automatique dans son ensemble.
Assemblage :
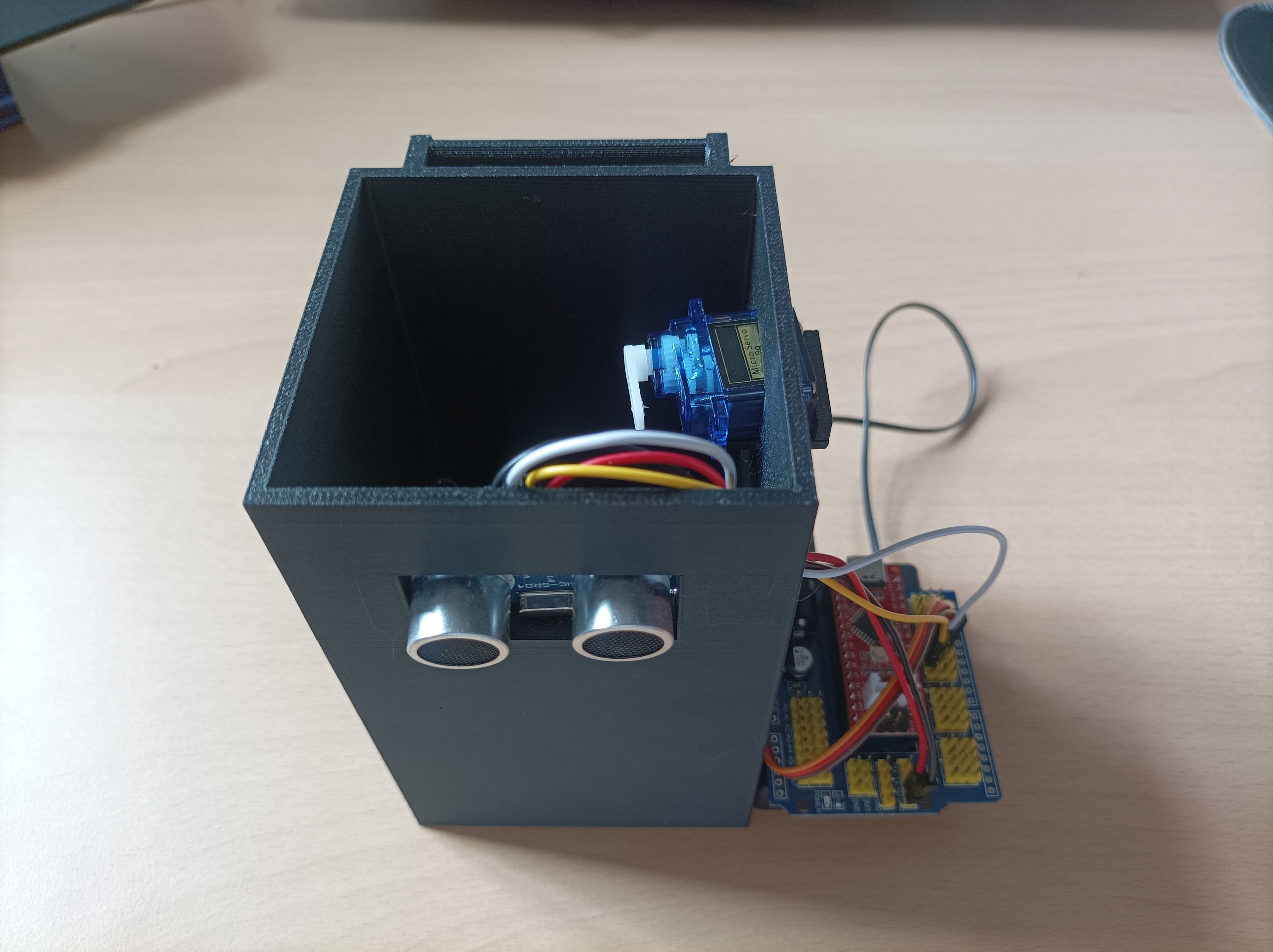
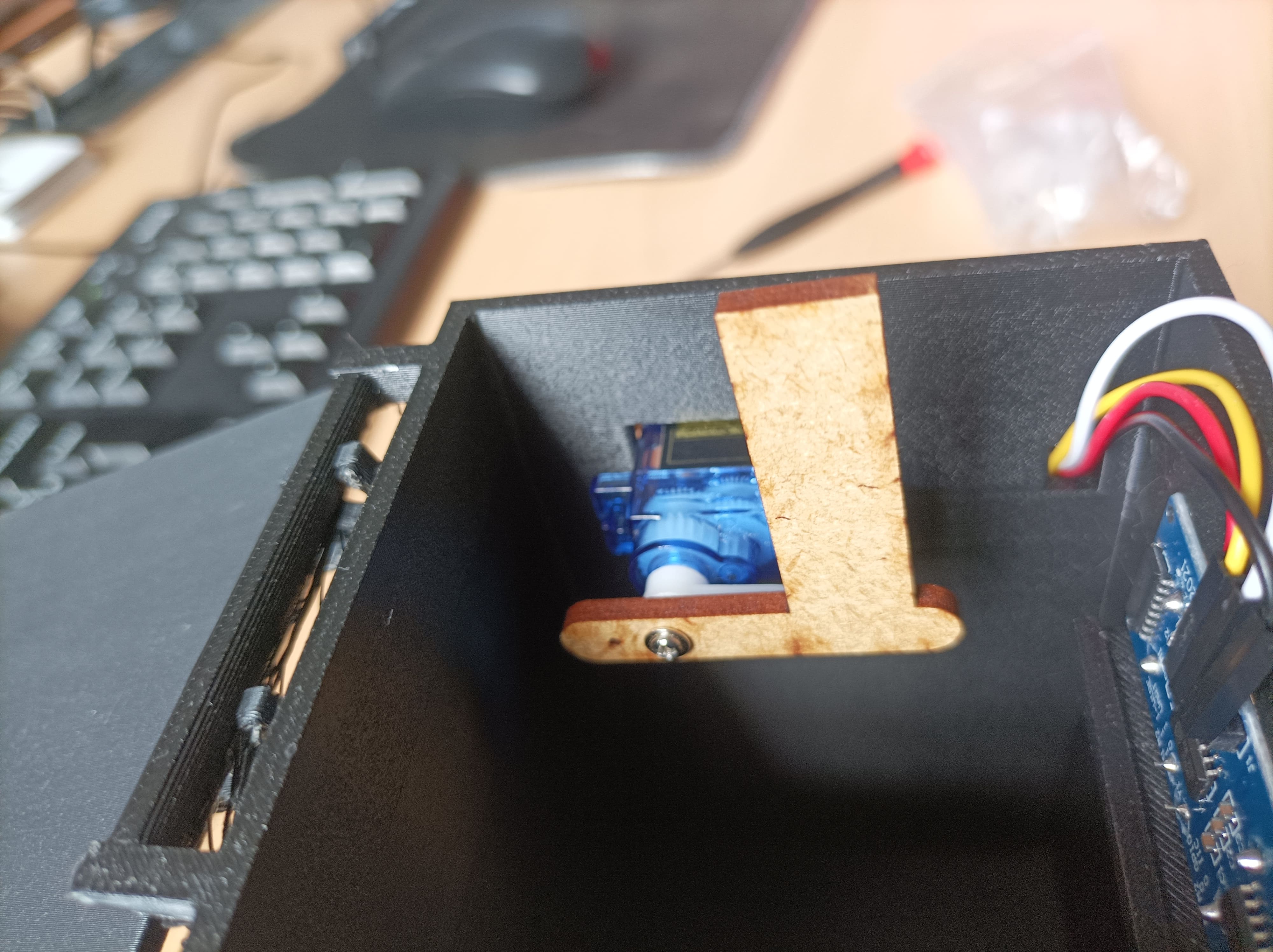
Positionner les capteurs de la même façon que sur les photos ci-dessous.
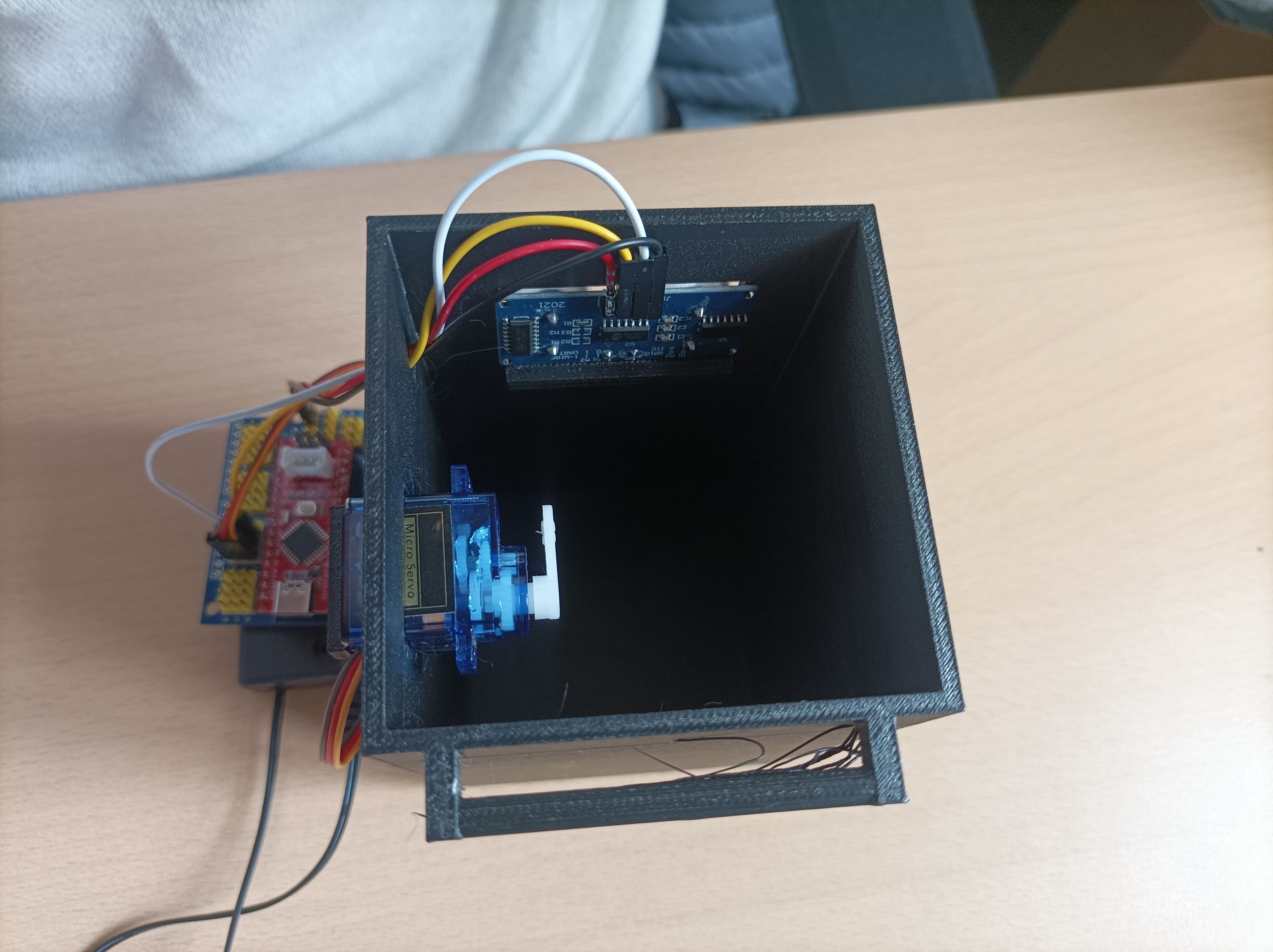
Câblage :
Vous référez à la page précédente . Voici un résumé :
- Capteur à ultrasons :
- VCC → 5V de l’Arduino
- GND → GND de l’Arduino
- TRIG → D9 de l’Arduino
- ECHO → D10 de l’Arduino
- Servomoteur :
- VCC (fil rouge) → 5V de l’Arduino
- GND (fil noir) → GND de l’Arduino
- Signal (fil jaune) → D11 de l’Arduino
Programmation final :
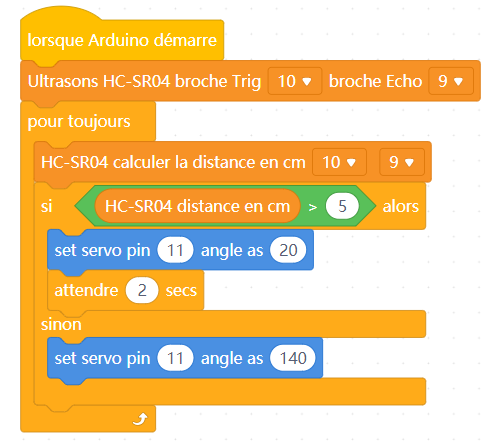
Programmation par bloc avec Mblock :
Demander aux élèves de réaliser le code final tout en les aidants si besoin. Voici le code final :
Programmation avec arduino IDE :
En fonction du niveau demander aux élèves d'écrire ou de copier le code suivant tout en expliquant ce dernier.
#include <Servo.h> // Inclure la bibliothèque Servo
// Déclaration des pins
const int trigPin = 9;
const int echoPin = 10;
Servo myServo;
void setup() {
Serial.begin(9600); // Initialiser la communication série
pinMode(trigPin, OUTPUT); // Définir le trigPin comme sortie
pinMode(echoPin, INPUT); // Définir l'echoPin comme entrée
myServo.attach(6); // Attacher le servomoteur à la pin D6
myServo.write(0); // Position initiale à 0 degrés
}
void loop() {
// Envoyer un signal
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
// Lire la durée du signal de retour
long duration = pulseIn(echoPin, HIGH);
int distance = duration * 0.034 / 2; // Calculer la distance
// Afficher la distance dans le moniteur série
Serial.print("Distance: ");
Serial.print(distance);
Serial.println(" cm");
// Si la distance est inférieure à 5 cm, déplacer le servomoteur
if (distance < 5) {
myServo.write(140); // Positionner le servomoteur à 180 degrés
delay(1000); // Attendre 1 seconde
myServo.write(0); // Retourner à 0 degrés
}
delay(500); // Attendre un peu avant la prochaine mesure
}
4. Tester le projet
Instructions :
Demandez aux élèves de télécharger le code final sur leur Arduino.Placez un objet à moins de 5 cm du capteur à ultrasons.Observez le servomoteur se déplacer à 180 degrés pendant 1 seconde, puis revenir à sa position initiale.
5. Conclusion et discussion
Synthèse des compétences acquises :
Compétences techniques et mécaniques :
LesélèvesConception
ontmécaniqueappris: savoir imaginer et concevoir le mécanisme d'ouverture automatique du couvercle-
Assemblage de composants : apprendre à
utilisermanipulerleetcapteurassembleràlesultrasonsdifférentes parties (couvercle, axe, moteur, composants électroniques, etc.) -
Choix des matériaux : identifier les matériaux adaptés au projet
Compétences en électronique :
-
Découverte et câblage de capteurs pour
mesurerdétecter une présence. -
Découverte et câblage de servomoteur pour l'ouverture/fermeture du couvercle.
-
Savoir réaliser un schéma de câblage et connecter les composants sur une carte Arduino.
Compétences en programmation :
-
Programmation d'un microcontrôleur Arduino : écrire un code qui gère les capteurs, les délais, et l'action du moteur.
-
Logique conditionnelle : comprendre comment programmer des
distances.conditions Ilssimplesont contrôlé un servomoteur en fonction des signaux PWM.Ils ont assemblé les deux composants pour créer un projet fonctionnel où le servomoteur se déplace en réponse à la(si détectiond’un→objetouvriràcouvercle).moins-
Optimisation du fonctionnement : ajuster les temps de
5réponse,cm.la durée d’ouverture, etc.
Compétences transversales :
- Gestion de projet : planifier les étapes de réalisation, répartir les tâches, respecter les délais.
-
Résolution de problèmes : savoir réagir face aux imprévus techniques ou fonctionnels.
-
Travail en équipe.
Questions de réflexion :
- Comment pourrait-on améliorer ce projet ? (ex. : ajouter une LED qui s'allume lorsque l'objet est détecté, amélioration de pièces mécaniques, etc...)
- Quelles autres applications pourraient utiliser un capteur à ultrasons et un servomoteur ensemble ?
- etc...
Projet similaire
https://www.hackster.io/FANUEL_CONRAD/automatic-soap-dispenser-75abd6