
Le module Bluetooth HC-05
Test et configuration du module
- Suivre les instructions pour le module HC-05, qui peut être configuré en module maître ou esclave. Le module HC-06 lui ne peut être que esclave, mais il est plus simple à configurer.
https://www.aranacorp.com/fr/votre-arduino-communique-avec-le-module-hc-05/
- On peut communiquer avec le module bluetooth HC-05 via la liaison série de l'Arduino Nano
- Se renseigner sur ce qu'est une liaison série, par ex. ici : https://arduino.blaisepascal.fr/bibliotheque-serial/
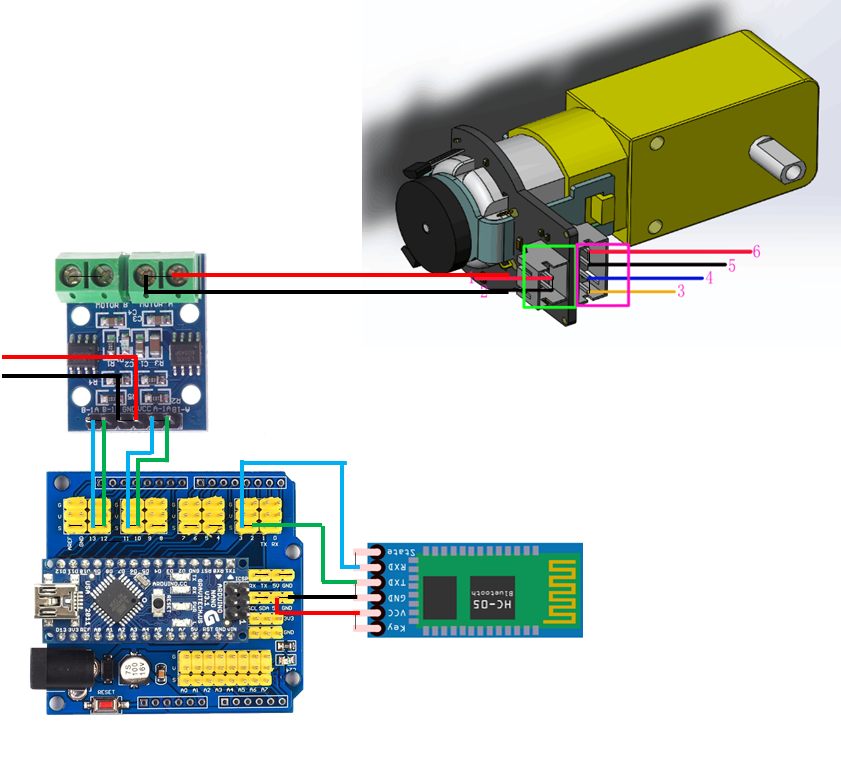
- Réaliser le câblage entre l'Arduino Nano et le module bluetooth HC-05
- Bien vérifier que le Pin qui Reçoit les données sur l'Arduino (RxDpin) soit connecté au Pin du HC-05 qui Tansmet (TxDpin). Et vice-versa, donc chaque câble transmet les données dans une direction opposée.
-
Si on prend les Pins RX (Digital 0) et TX (Digital 1) de l'arduino pour connecter RXD et TXD du HC-05, cela rentre en conflit avec la connexion USB entre l'arduino et le PC.
-
Donc on prend les Pins Digital 2 et 3 et on utilise la bibliothèque
SoftwareSerial
//Test et Configuration du module Bluetooth HC-05
//Le port série matériel de l'Arduino Nano (Pins 0/RX et 1/TX) est déjà utilisé pour la liaison Arduino-USB avec l'ordinateur
//On utilise donc une liaison série logicielle pour la liaison Arduino-HC05 avec le module Bluetooth
#include <SoftwareSerial.h> //Software Serial Port
#define RxDpin 2 //Pin Digital 2 pour arduino Rx (pin0=serial)
#define TxDpin 3 //Pin Digital 3 pour arduino Tx (pin1)
//Pour la liaison SoftwareSerial Arduino-HC05, quand on veut configurer le HC-05
//on maintient le bouton à côté de la PIN EN/KEY enfoncé au démarrage de l'Arduino
#define baudrate 38400 //Vitesse pour la liaion Arduino-HC05 en mode configuration
//Pour la liaison SoftwareSerial Arduino-HC05, quand on veut communiquer à travers le bluetooth depuis un smartphone,
//on appaire le HC-05 depuis l'appli avec le mot-de-passe par défaut : 1234
// #define baudrate 9600 //Vitesse pour la liaion Arduino-HC05 en mode utilisation smartphone
SoftwareSerial BTSerie(RxDpin,TxDpin);
char caractereTexte;
String phraseTexte;
void setup()
{
Serial.begin(9600); //Vitesse (baudRate) pour la liaison Arduino-USB
delay(500);
Serial.println("En mode communication USB - Pret pour les commandes AT");
Serial.println("Le HC-05 doit clignoter lentement (2 secondes)");
//Configuration de la liaison SoftwareSerial avec le HC-05
pinMode(RxDpin, INPUT); //Configuration du Pin RxD (Receive) en mode entrée
pinMode(TxDpin, OUTPUT); //Configuration du Pin TxD (Transmit) en mode sortie
BTSerie.begin(baudrate); //Vitesse pour la liaion Arduino-HC05
if (baudrate==38400) {
Serial.println("En mode communication USB - Pret pour les commandes AT");
Serial.println("Le HC-05 doit clignoter lentement (2 secondes)");
}
else if (baudrate==9600){
Serial.println("En mode smartphone - Pret pour être appairé");
Serial.println("Le HC-05 doit clignoter rapidement avant d'être appairé");
}
else{
Serial.println("La vitesse de communication (baudrate) a été personnalisée");
}
delay(500);
// Commandes AT pour le HC-05
// BTSerie.print("AT+NAME?"); //Demande le nom du module. Noter le ?
// BTSerie.print("AT+NAME=RCcar-HC-05-1"); //Définir le nom du module.
BTSerie.print("AT+VERSION?"); //Demande le N° de version. Noter le ?
// BTSerie.print("AT+UART?"); //Demande la vitesse série (baudrate). Noter le ?
// BTSerie.print("AT+UART=57600,0,0"); //Définir la vitesse série (baudrate).
// BTSerie.print("AT+ROLE?"); //Demande le mode du module, maitre ou esclave. Noter le ?
// BTSerie.print("AT+PSWD?"); //Demande le mot-de-passe du module. Noter le ?
// La console série de l'ordinateur d'où l'on envoie les commandes AT doit être réglée de telle sorte que
// les fins de ligne soient « les deux, NL et CR », ce qui revient à envoyer \r\n à la fin de chaque commande.
BTSerie.print("\r\n"); // sur HC-05, toutes les commandes doivent se terminer par \r\n
// afficher ce que le module bluetooth répond
Serial.print( BTSerie.read() ); // afficher sur la console ce qui est lu sur BT
// pour AT+VERSION?, c'est le n° de version puis OK qui s'affiche
void loop(){
//On lit ce qui est envoyé à l'Arduino depuis la console via la liaison Serial
readSerialPort();
//Et on l'Arduino l'envoie au HC-05 via la liaison SoftwareSerial
if(phraseTexte!="") BTSerie.println(phraseTexte);
//L'Arduino lit ce que le HC-05 envoie via la liaison SoftwareSerial et l'envoie vers la console
if (BTSerie.available()>0){
Serial.write(BTSerie.read());
}
}
void readSerialPort(){
phraseTexte="";
while (Serial.available()) {
delay(10);
if (Serial.available() >0) {
caractereTexte = Serial.read(); //le port série envoie des caractères de texte octet par octet (byte from serial buffer)
phraseTexte += caractereTexte; //construction d'une phrase en concaténant les caractères reçus
}
}
}Pilotage d'un moteur CC à partir d'un smartphone
//Voiture modélisée radiocommandée (RC car) avec deux moteurs CC à l'arrière et un servomoteur de direction
#include <Servo.h>
Servo myservo; // create servo object to control a servo
//Le port série matériel de l'Arduino Nano (Pins 0/RX et 1/TX) est déjà utilisé pour la liaison Arduino-USB avec l'ordinateur
//On utilise donc une liaison série logicielle pour la liaison Arduino-HC05 avec le module Bluetooth
#include <SoftwareSerial.h> //Software Serial Port
#define RxDpin 2 //Pin Digital 2 pour arduino Rx (pin0=serial)
#define TxDpin 3 //Pin Digital 3 pour arduino Tx (pin1)
//Pour la liaison SoftwareSerial Arduino-HC05, quand on veut configurer le HC-05
//on maintient le bouton à côté de la PIN EN/KEY enfoncé au démarrage de l'Arduino
// #define baudrate 38400 //Vitesse pour la liaion Arduino-HC05 en mode configuration
//Pour la liaison SoftwareSerial Arduino-HC05, quand on veut communiquer à travers le bluetooth depuis un smartphone,
//on appaire le HC-05 depuis l'appli avec le mot-de-passe par défaut : 1234
#define baudrate 9600 //Vitesse pour la liaion Arduino-HC05 en mode utilisation smartphone
SoftwareSerial BTSerie(RxDpin,TxDpin);
char caractereTexte;
String phraseTexte;
void setup()
{
Serial.begin(9600); //Vitesse (baudRate) pour la liaison Arduino-USB
delay(500);
//Configuration de la liaison SoftwareSerial avec le HC-05
pinMode(RxDpin, INPUT); //Configuration du Pin RxD (Receive) en mode entrée
pinMode(TxDpin, OUTPUT); //Configuration du Pin TxD (Transmit) en mode sortie
BTSerie.begin(baudrate); //Vitesse pour la liaion Arduino-HC05
if (baudrate==38400) {
Serial.println("En mode communication USB - Pret pour les commandes AT");
Serial.println("Le HC-05 doit clignoter lentement (2 secondes)");
}
else if (baudrate==9600){
Serial.println("En mode smartphone - Pret pour être appairé");
Serial.println("Le HC-05 doit clignoter rapidement avant d'être appairé");
}
else{
Serial.println("La vitesse de communication (baudrate) a été personnalisée");
}
delay(500);
pinMode(13,OUTPUT); //left motors forward
pinMode(12,OUTPUT); //left motors reverse
pinMode(11,OUTPUT); //right motors forward
pinMode(10,OUTPUT); //right motors reverse
pinMode(9,OUTPUT); //Led
pinMode(5,OUTPUT); //SG90 steering motor
myservo.attach(5); // attaches the servo on pin 5 to the servo object
}
void loop() {
// Serial.write(blueToothSerial.read());
//On lit caractere par caractere sur la liaion Arduino-USB et on affiche sur la liaison Arduino-HC05
if (Serial.available()) {
caractereTexte = Serial.read();
BTSerie.write(caractereTexte);
// Serial.println("Caractere envoye vers bluetooth : ");
// Serial.println(caractereRecu);
}
//On lit caractere par caractere sur la liaion Arduino-HC05 et on affiche sur la liaison Arduino-USB
if (BTSerie.available()) {
caractereTexte = BTSerie.read();
Serial.print(caractereTexte);
// }
if(caractereTexte == 'F'){ //move forward(all motors rotate in forward direction)
digitalWrite(10,LOW);
digitalWrite(12,LOW);
digitalWrite(13,HIGH);
digitalWrite(11,HIGH);
// myservo.write(90); // sets the servo position according to the scaled value
}
else if(caractereTexte == 'B'){ //move reverse (all motors rotate in reverse direction)
digitalWrite(13,LOW);
digitalWrite(11,LOW);
digitalWrite(12,HIGH);
digitalWrite(10,HIGH);
// myservo.write(90); // sets the servo position according to the scaled value
}
else if(caractereTexte == 'L'){ //turn right (left side motors rotate in forward direction, right side motors doesn'caractereRecu rotate)
digitalWrite(10,LOW);
digitalWrite(12,LOW);
digitalWrite(13,LOW);
digitalWrite(11,HIGH);
// myservo.write(60); // sets the servo position according to the scaled value
}
else if(caractereTexte == 'R'){ //turn left (right side motors rotate in forward direction, left side motors doesn'caractereRecu rotate)
digitalWrite(10,LOW);
digitalWrite(12,LOW);
digitalWrite(11,LOW);
digitalWrite(13,HIGH);
// myservo.write(120); // sets the servo position according to the scaled value
}
else if(caractereTexte == 'S'){ //STOP (all motors stop)
digitalWrite(13,LOW);
digitalWrite(12,LOW);
digitalWrite(11,LOW);
digitalWrite(10,LOW);
// myservo.write(90);
}
delay(100);
}
}
Application bluetooth
Android :
- F pour Forward : Avancer
- B pour Backward : Reculer
- R pour Right : Aller à droite
- L pour Left : Aller à gauche
- S pour Stop : Arrêter
- Quand on appuie sur la flèche du haut, le caractère
F(objetchar) est envoyé par le téléphone au HC-05 puis à l'Arduino via la liaison série Software Arduino-HC05 qui est configurée par défaut en baudrate 9600 (vérifiable en envoyant la commandeBTSerie.print("AT+UART?");au HC-05) - Quand on relâche le bouton, le caractère
Sest envoyé
L'application suivante testée ne semble pas fonctionner avec les Android récents :
- https://play.google.com/store/apps/details?id=com.himanshu.ArduinoAutomation&hl=en_GB
- Chercher une application alternative en tapant les mots-clé bluetooth arduino
- Autres applications possibles : Carino, bluetooth2, BLE RobotCar, Arduino Bluetooth Controller (giumig)
Sources
https://knowledge.parcours-performance.com/arduino-bluetooth-hc-05-hc-06/