
Phase 1 - Théorie et fonctionnement des composants
Phase 1 - Théorie et fonctionnement des composants
Objectifs pédagogiques :
- Comprendre le fonctionnement de l’Arduino Nano et son Shield.
- Découvrir le rôle d’un capteur à ultrasons (HC-SR04).
- Apprendre comment fonctionne un servomoteur et comment le contrôler.
- Apprendre à câbler ces composants ensemble correctement pour un projet Arduino.
Matériel nécessaire :
- 1 x Arduino Nano
- 1 x Shield pour Arduino Nano (ou une breadboard pour faciliter les connexions)
- 1 x Capteur à ultrasons HC-SR04
- 1 x Servomoteur SG90
- Fils de connexion
- 1 x Câble USB pour programmer l’Arduino Nano
- 1 x Ordinateur avec l’IDE Arduino installé
1. Introduction à l'Arduino Nano (15 minutes)
Qu'est-ce que l'Arduino Nano ?
L’Arduino Nano est une carte électronique programmable, idéale pour les projets électroniques. Elle permet de contrôler des composants comme des capteurs, moteurs, LED, etc., en les connectant via ses broches d’entrée/sortie (I/O).
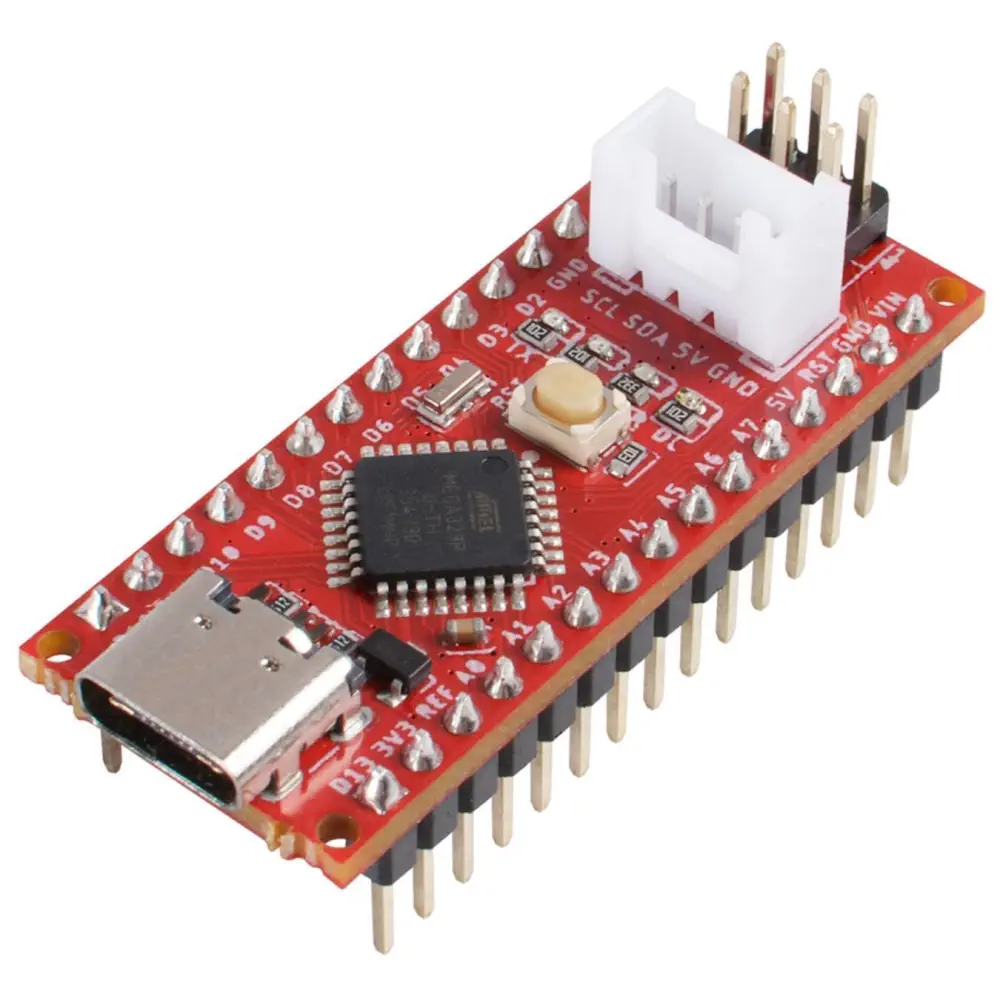
Caractéristiques principales :
- Microcontrôleur : ATmega328P (comme l’Arduino Uno).
- Taille compacte : 45 x 18 mm, parfaite pour les petits projets.
- Alimentation : via USB ou par une source externe (de 6V à 12V).
- Pins disponibles :
- 14 pins numériques (D0 à D13) pour lire ou écrire des états (HIGH/LOW).
- 8 pins analogiques (A0 à A7) pour lire des valeurs de capteurs.
- Des broches d’alimentation (5V, 3.3V, GND).
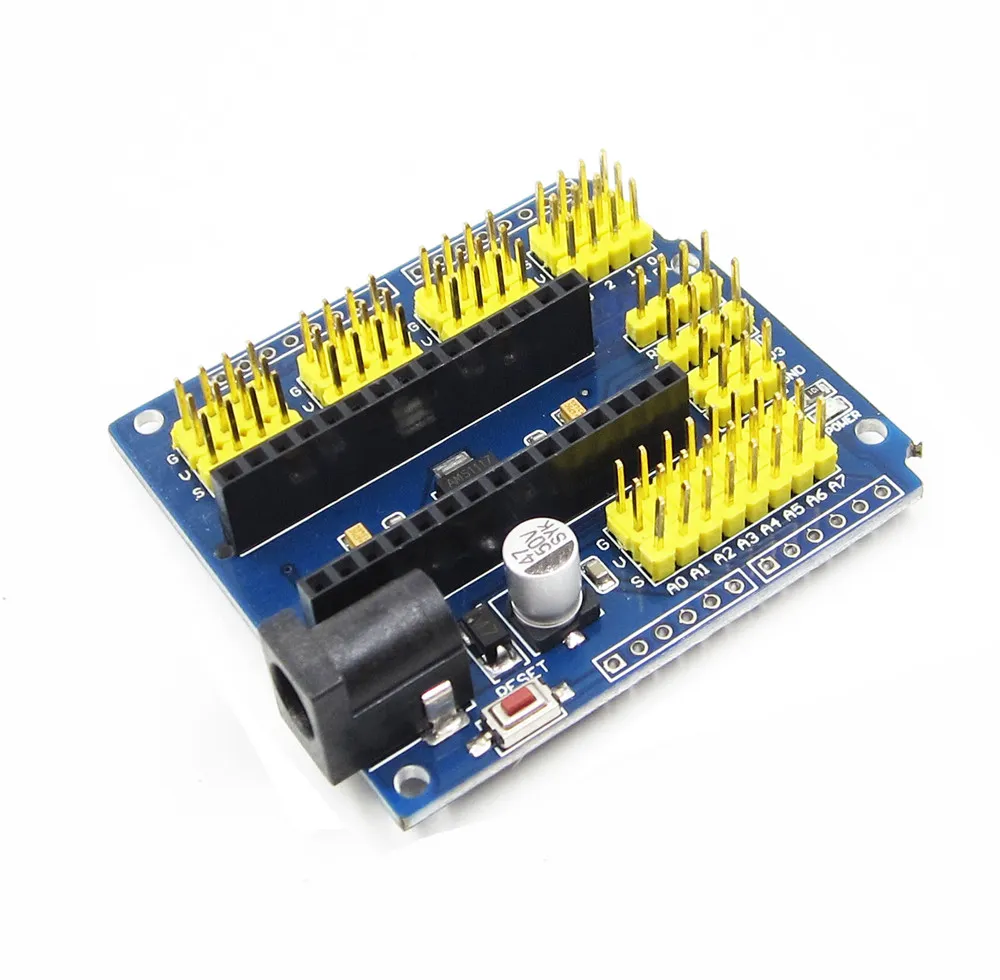
Le rôle du Shield pour Arduino Nano :
Le Shield permet de simplifier les connexions. Il agit comme un adaptateur où chaque broche de l'Arduino est accessible de manière pratique. Avec un Shield, il devient plus facile de connecter plusieurs composants sans erreurs.
2. Capteur à ultrasons HC-SR04 (20 minutes)
Comment fonctionne le capteur à ultrasons ?
3. Fonctionnement du servomoteur SG90 (15 minutes)
https://innovation.iha.unistra.fr/books/robotique-educative/page/quest-ce-quun-servo-moteur
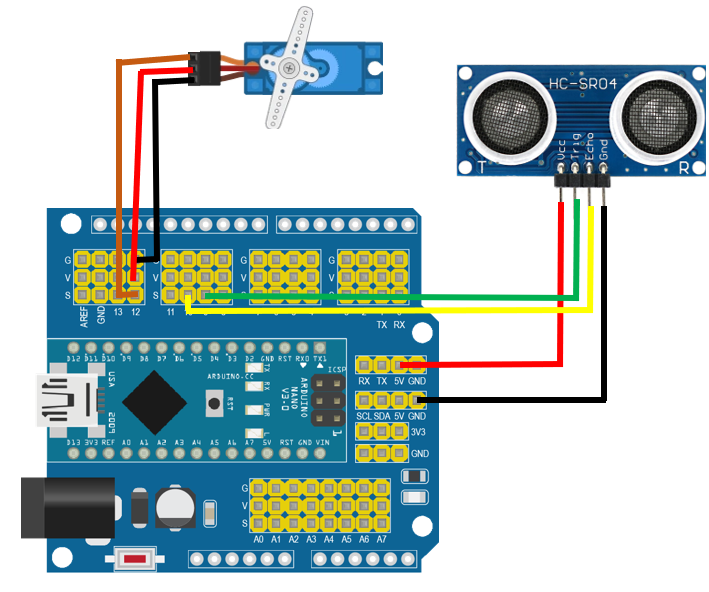
Explication du câblage complet (10 minutes)
Maintenant que nous avons vu chaque composant individuellement, voici un résumé du câblage complet :
-
Capteur à ultrasons (HC-SR04) :
- VCC → 5V de l’Arduino
- GND → GND de l’Arduino
- TRIG → D9 de l’Arduino
- ECHO → D10 de l’Arduino
-
Servomoteur :
- VCC (fil rouge) → 5V de l’Arduino
- GND (fil noir) → GND de l’Arduino
- Signal (fil jaune) → D12 de l’Arduino
Conclusion et exercices pratiques (10 minutes)
Synthèse :
- Nous avons vu comment l’Arduino Nano fonctionne avec un shield pour faciliter les connexions.
- Nous avons compris comment le capteur à ultrasons mesure des distances et comment nous allons utiliser ces informations pour contrôler un servomoteur.
- Le servomoteur répond à des signaux PWM pour se déplacer selon des angles précis.
Exercice pratique :
Pour terminer la séance, les participants peuvent reproduire le câblage décrit ci-dessus sur leur propre montage.
Correction de L'exercice :
Code à utiliser : Le code sera introduit dans la prochaine séance, mais vous pouvez donner un aperçu du fonctionnement et les amener à réfléchir sur la façon dont les composants vont interagir ensemble.