
Assemblage et programmation de la poubelle à couvercle automatique
1. Utilisation du capteur à ultrasons HC-SR04
Objectif :
Gestion et programmation des capteurs/actionneurs de la poubelle à couvercle automatique dans son ensemble.
Câblage :
Vous référez à la page précédente . Voici un résumé :
- Capteur à ultrasons :
- VCC → 5V de l’Arduino
- GND → GND de l’Arduino
- TRIG → D9 de l’Arduino
- ECHO → D10 de l’Arduino
- Servomoteur :
- VCC (fil rouge) → 5V de l’Arduino
- GND (fil noir) → GND de l’Arduino
- Signal (fil jaune) → D12 de l’Arduino
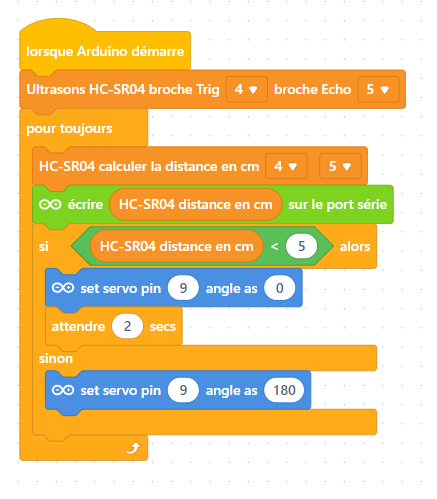
Programmation final :
Programmation par bloc avec Mblock :
Premièrement ne pas oublier de rajouter l'extension "Ultrasons HC-SR04"
Etape 1
Réfléchir a un algorithme qui permettrais a la poubelle d'être "intelligente" et de s'ouvrir d'elle même
Aide : Quand vous voudriez mettre un objet dans la poubelle, elle détectera votre main et s'ouvrira d'elle même
Etape 2
Mettre l'algorithme en place dans MBlock, faire que la poubelle détecte les objets a moins de 5 cm et puisse ouvrir son couvercle.
Aide : quand l'ultrason détecte un objet a moins de 5cm faire que le servomoteur tourne de 0 a 180 se qui permettrais au couvercle de la poubelle de s'ouvrir
Conclusion et discussion
Synthèse des compétences acquises :
Compétences techniques et mécaniques :
-
Conception mécanique : savoir imaginer et concevoir le mécanisme d'ouverture automatique du couvercle
-
Assemblage de composants : apprendre à manipuler et assembler les différentes parties (couvercle, axe, moteur, composants électroniques, etc.)
-
Choix des matériaux : identifier les matériaux adaptés au projet
Compétences en électronique :
-
Découverte et câblage de capteurs pour détecter une présence.
-
Découverte et câblage de servomoteur pour l'ouverture/fermeture du couvercle.
-
Savoir réaliser un schéma de câblage et connecter les composants sur une carte Arduino.
Compétences en programmation :
-
Programmation d'un microcontrôleur Arduino : écrire un code qui gère les capteurs, les délais, et l'action du moteur.
-
Logique conditionnelle : comprendre comment programmer des conditions simples (si détection → ouvrir couvercle).
-
Optimisation du fonctionnement : ajuster les temps de réponse, la durée d’ouverture, etc.
Compétences transversales :
- Gestion de projet : planifier les étapes de réalisation, répartir les tâches, respecter les délais.
-
Résolution de problèmes : savoir réagir face aux imprévus techniques ou fonctionnels.
-
Travail en équipe.
Perspectives :
- Comment pourrait-on améliorer ce projet ? (ex. : ajouter une LED qui s'allume lorsque l'objet est détecté, amélioration de pièces mécaniques, etc...)
- Quelles autres applications pourraient utiliser un capteur à ultrasons et un servomoteur ensemble ?
- etc...
Projet similaire
https://www.hackster.io/FANUEL_CONRAD/automatic-soap-dispenser-75abd6