
Programmation de la poubelle à couvercle automatique
Objectif
Gestion et programmation de l’ensemble des capteurs et actionneurs d’une poubelle à couvercle automatique.
Programmation du système
Programmation par blocs avec mBlock :
Tout d’abord, vous ne devez pas oublier d’ajouter l’extension « Ultrasons HC-SR04 ».
Pour un tutoriel en détail sur l'ajout de l'extension : https://innovation.iha.unistra.fr/books/robotique-educative/page/quest-ce-quun-capteur-a-ultrasons
Exercice – Commander le couvercle avec un servomoteur
Objectif pédagogique
Associer un capteur à un actionneur pour automatiser un mécanisme.
Consigne
À partir de l’exercice 1 :
Défis supplémentaires (pour aller plus loin)
Validation attendue
L’élève sait :
Bilan pédagogique
À la fin de ces deux exercices, les élèves comprennent :
🎯 Résultat : ils sont capables de recréer et adapter le code d’une poubelle à couvercle automatique, ce qui est un excellent projet concret et motivant en robotique.
Correction du code :
Voici la correction du code :
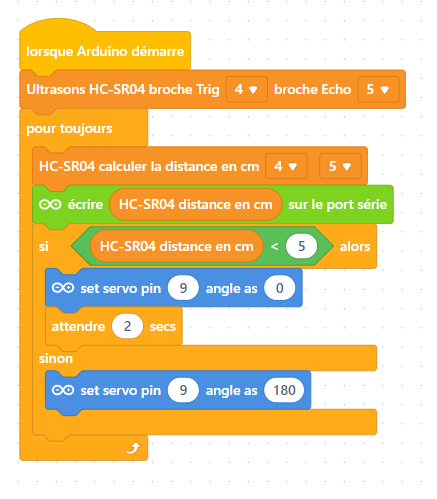
Ce programme met en œuvre un système d’ouverture automatique de couvercle basé sur la détection de proximité, typiquement utilisé pour une poubelle robotisée sans contact dans un club de robotique.
Principe général
Le code associe :
-
un capteur à ultrasons HC-SR04 pour mesurer la distance entre la poubelle et un obstacle (main, déchet, objet),
-
un servomoteur SG90 (180°) pour actionner mécaniquement le couvercle.
L’objectif est d’ouvrir le couvercle lorsqu’un utilisateur s’approche, puis de le refermer automatiquement.
Déroulement du programme
-
Initialisation au démarrage
-
L’Arduino configure le capteur HC-SR04 avec :
-
broche Trig = 4
-
broche Echo = 5
-
-
Le servomoteur est connecté à la broche 9.
-
-
Boucle de fonctionnement continu
-
Le capteur ultrason mesure en permanence la distance en centimètres devant la poubelle.
-
Cette distance est envoyée sur le port série, ce qui permet :
-
le débogage,
-
la visualisation du comportement du système,
-
l’analyse pédagogique avec les membres du club.
-
-
-
Logique de décision
-
Si la distance mesurée est inférieure à 5 cm :
-
le servomoteur est positionné à 0° → ouverture du couvercle,
-
une temporisation de 2 secondes permet à l’utilisateur de jeter le déchet.
-
-
Sinon :
-
le servomoteur est positionné à 180° → fermeture du couvercle.
-
-
Conclusion et discussion
Synthèse des compétences acquises
Compétences techniques et mécaniques
-
Conception mécanique : savoir imaginer et concevoir le mécanisme d’ouverture automatique du couvercle.
-
Assemblage de composants : apprendre à manipuler et assembler les différentes parties (couvercle, axe, moteur, composants électroniques, etc.).
-
Choix des matériaux : identifier les matériaux adaptés au projet.
Compétences en électronique
-
Découverte et câblage de capteurs permettant de détecter une présence.
-
Découverte et câblage d’un servomoteur pour l’ouverture et la fermeture du couvercle.
-
Savoir réaliser un schéma de câblage et connecter les composants sur une carte Arduino.
Compétences en programmation
-
Programmation d’un microcontrôleur Arduino : écrire un programme qui gère les capteurs, les délais et l’action du moteur.
-
Logique conditionnelle : comprendre comment programmer des conditions simples (si détection → ouverture du couvercle).
-
Optimisation du fonctionnement : ajuster les temps de réponse, la durée d’ouverture, etc.
Compétences transversales
-
Gestion de projet : planifier les étapes de réalisation, répartir les tâches et respecter les délais.
-
Résolution de problèmes : savoir réagir face aux imprévus techniques ou fonctionnels.
-
Travail en équipe.
Perspectives
-
Améliorer le projet (par exemple : ajouter une LED qui s’allume lorsqu’un objet est détecté, améliorer les pièces mécaniques, etc.).
-
Imaginer d’autres applications utilisant un capteur à ultrasons et un servomoteur ensemble.
Projet similaire
https://www.hackster.io/FANUEL_CONRAD/automatic-soap-dispenser-75abd6