
Programmation d'un servomoteur
Programmation des Servomoteurs avec mBlock
Objectif : Comprendre le fonctionnement des servomoteurs et apprendre à les programmer avec mBlock.
1. Introduction aux Servomoteurs
-
Qu’est-ce qu’un servomoteur ?
- Pour en savoir plus sur le servomoteur cliquez ici
2. Configuration de mBlock pour Contrôler un Servo
-
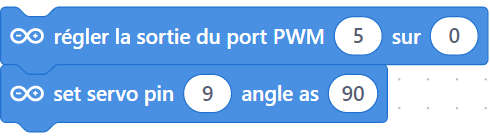
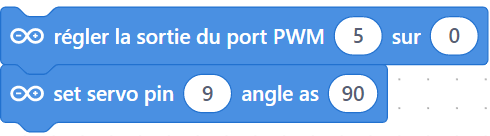
Présentation des blocs spécifiques à la gestion des servomoteurs
-
Choix du bon port PWM sur l’Arduino Nano
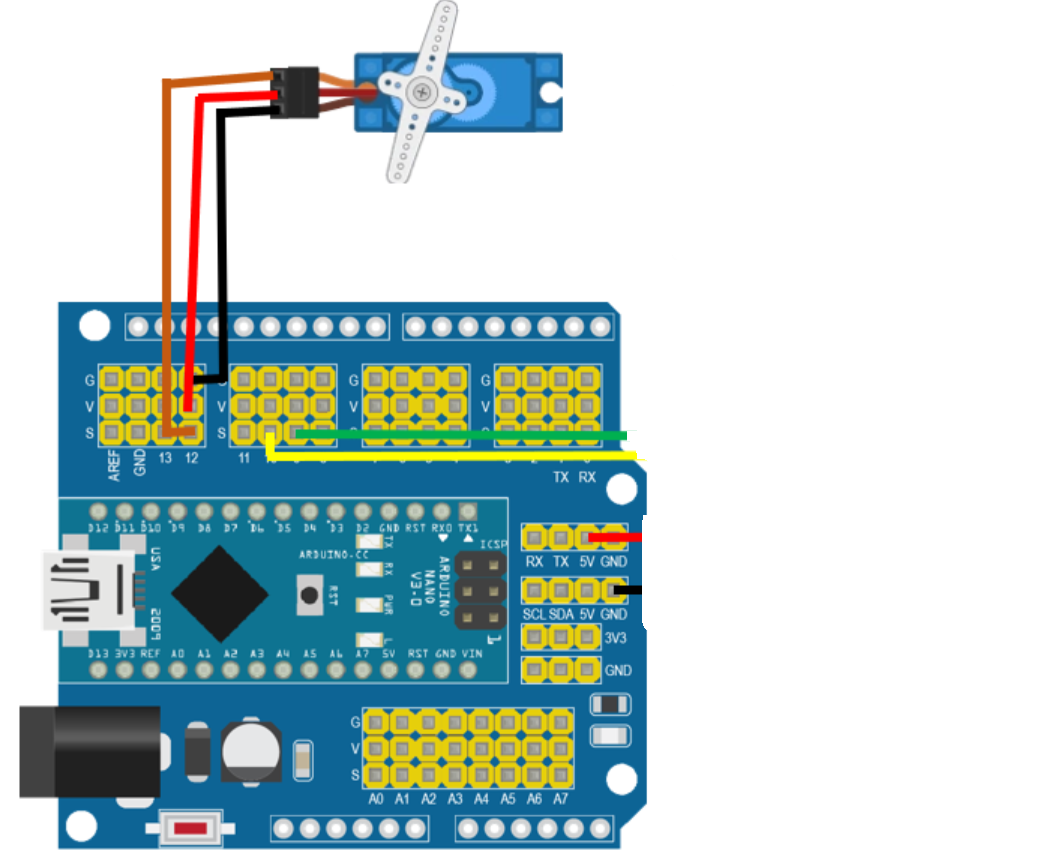
- Branchement d'un servomoteur à un Arduino Nano
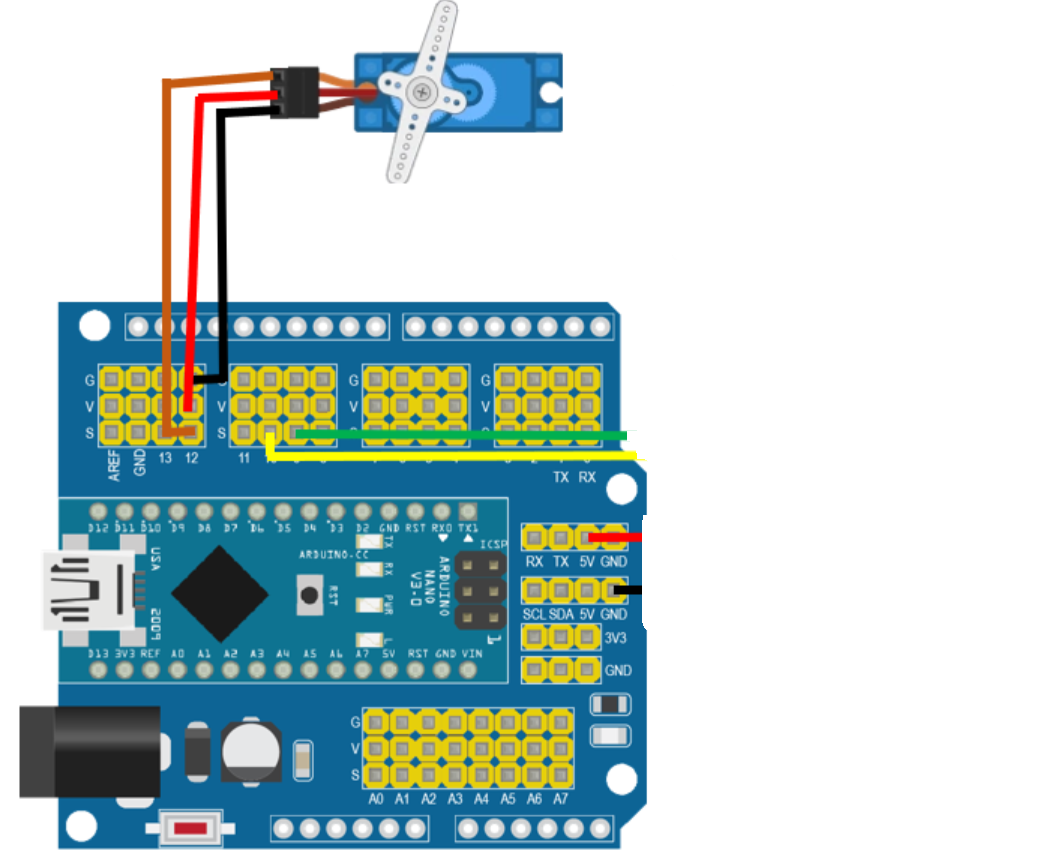
- Un servomoteur possède 3 câbles, le câble noir se branche sur la ligne G (Ground), le rouge sur la ligne V (Volt), et le jaune sur la ligne S ( Signal) et entre les colonnes de 2 à 13 inclus
-
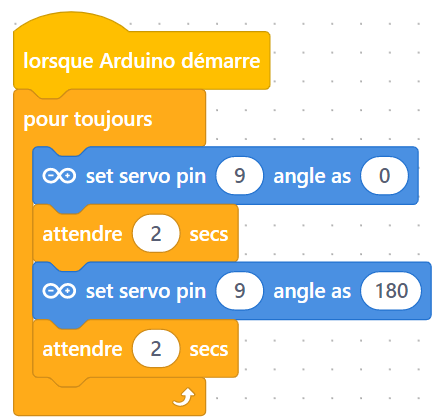
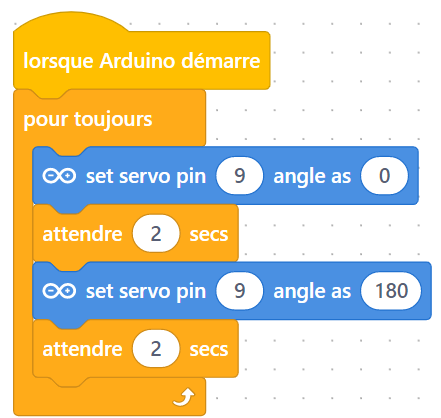
Explication du bloc "Définir l'angle du servo" Exercice 1 : Programmer un servomoteur 180 pour qu'il fasse en boucle un mouvement de 0 à 180 degrés puis de 180 à 0 en attendant 2 sec entre les mouvements
- Correction :
3. Programmation d’un Mouvement Automatisé
-
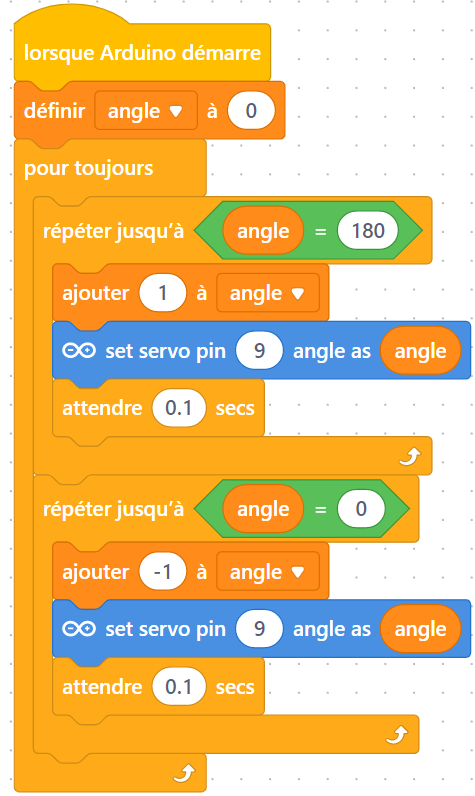
Création d’un programme pour :
-
Faire bouger le servo de 0° à 180° progressivement et inversement
-
Répéter le mouvement avec une boucle
-
- Correction :
Ajout d’un bouton pour déclencher le mouvement du servo Possibilités d’amélioration : variation de vitesse, plusieurs servos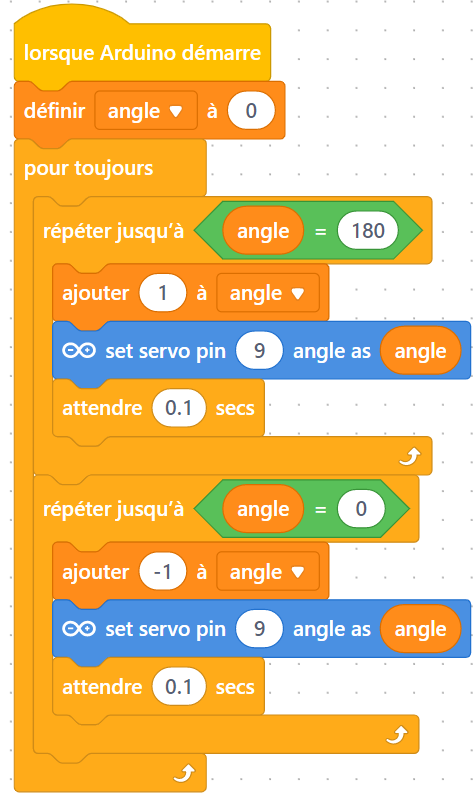
4. Discussion et Applications
-
Applications pratiques : bras robotisé,
ouverturepoubelledeconnectée,porteLittleautomatique, robotique éducativeBot -
Questions et suggestions d’amélioration