
Programmation d'un servomoteur RC 360°
Programmation des Servomoteurs avec mBlock et Arduino IDE
Objectif :
Comprendre le fonctionnement des servomoteurs et apprendre à les programmer avec mBlock et Arduino IDE.
1. Introduction aux Servomoteurs
Qu’est-ce qu’un servomoteur ?
Un servomoteur est un moteur à rotation limitée, généralement 180°, qui est contrôlé par un signal PWM (Pulse Width Modulation). Il est utilisé dans de nombreux projets tels que les bras robotisés, les portes automatiques et les robots éducatifs.
➡️ Pour en savoir plus sur les servomoteurs, cliquez ici.
2. Configuration et Programmation avec mBlock
Présentation des blocs spécifiques à la gestion des servomoteurs
Pour un servomoteur RC 360° on va utiliser le bloc ci-dessous que l'on peut trouver dans l'extensions "Servo360" ou ici "servo.mext" à télécharger et faire un glisser-déposer sur Mblock.
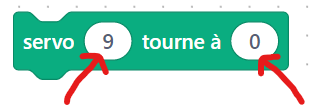
Numéro de broche vitesse du servomoteur (dans un sens entre [-100 et 0[ et dans l'autre entre ]0 et 100])
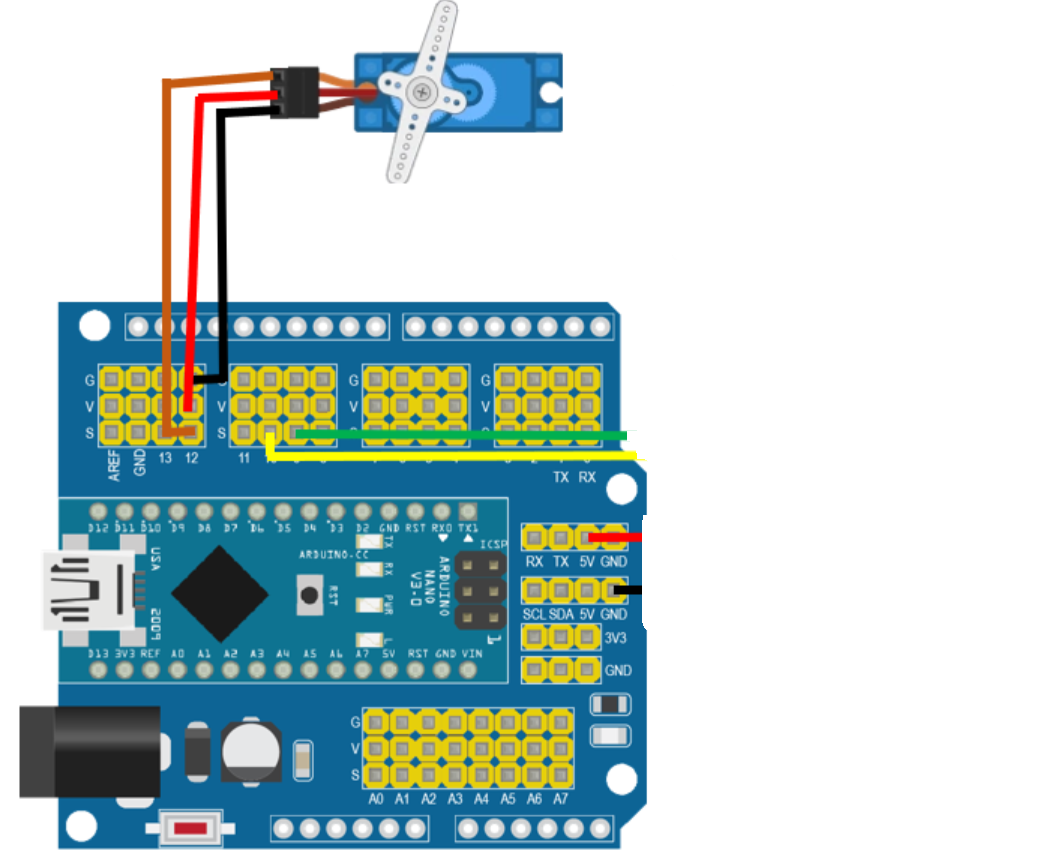
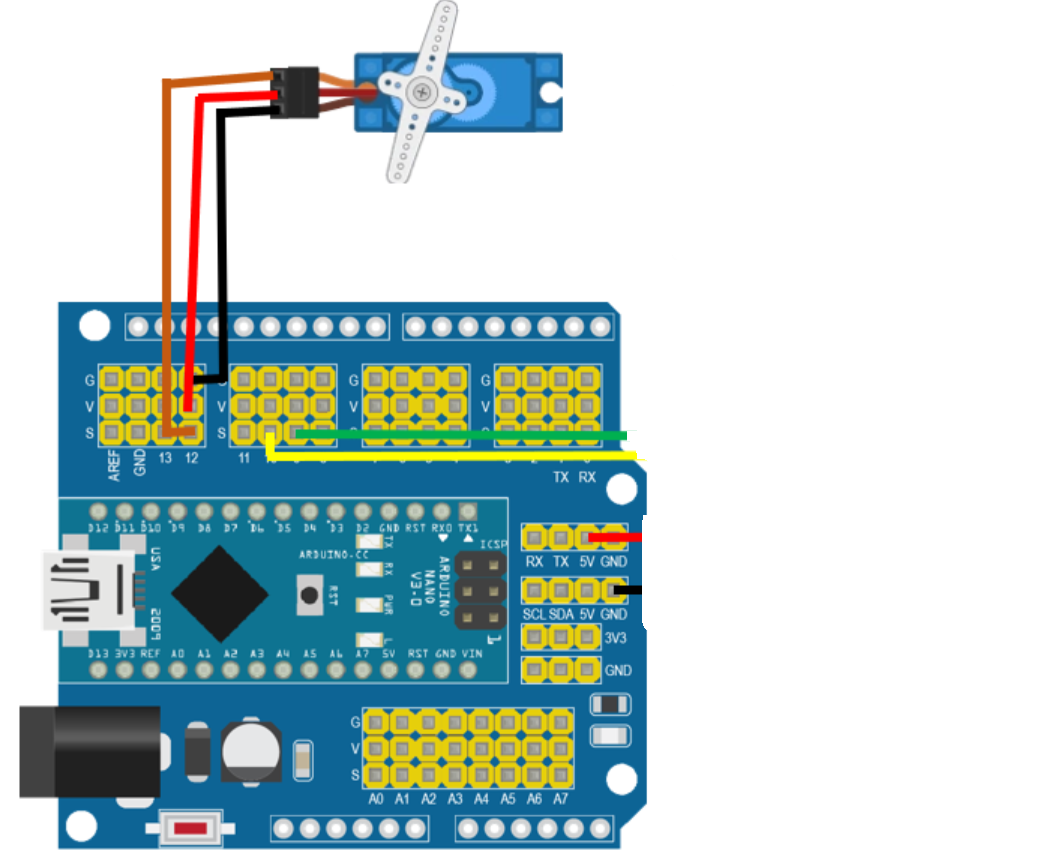
Branchement d'un servomoteur à un Arduino Nano
Un servomoteur possède trois câbles :
-
Noir ou Marron → GND (Masse)
-
Rouge → 5V (Alimentation)
-
Jaune ou Orange → Signal (Entre les broches 2 et 13 du Nano)
Exercice 1 : Inverser le sens de rotation
Consigne : Programmer un servomoteur RC 360° pour qu'il effectue en boucle un changement de sens de rotation à vitesse maximale et cela toute les 2 secondes.
Correction :

3. Configuration et Programmation avec Arduino IDE
Exercice 2 : Inverser le sens de rotation
Consigne : Programmer un servomoteur 360 pour qu'il effectue en boucle un changement de sens de rotation à vitesse maximale et cela toute les 2 secondes.
Correction :
#include <Servo.h>
Servo monServo; // Création de l'objet Servo
void setup() {
monServo.attach(9); // Connexion du servomoteur sur la broche D9
}
void loop() {
monServo.writeMicroseconds(2000); // Vitesse maximale dans un sens
delay(2000); // Tourne pendant 2 secondes
monServo.writeMicroseconds(1000); // Vitesse maximale dans l'autre sens
delay(2000); // Tourne pendant 2 secondes
}
4. Discussion et Applications
Applications pratiques
-
🤖 Bras robotisé
-
🗑️ Poubelle connectée
-
🤖 Little Bot
Questions et suggestions d’amélioration
✅ Ajouter un potentiomètre pour contrôler l’angle du servomoteur.
✅ Utiliser un bouton poussoir pour déclencher le mouvement.
✅ Remplacer le servomoteur 180° par un servomoteur à rotation continue.