
Qu'est ce que le club robotique de l'IUT d'Haguenau
Objectifs et compétences
Tous les mercredis après midi, en période scolaire, le club robotique Créabot accueille des collégiens passionnés par les technologies du numérique pour explorer et développer leur intérêt pour les robots au sein du Fablab Alsace du Nord (FAN) de l'IUT de Haguenau .
Ce club a pour objectif d’initier un jeune public à la robotique et la programmation afin de les sensibiliser aux métiers et aux enjeux technologiques d'aujourd'hui et de demain. Elle contribue au développement des apprentissages fondamentaux que sont les mathématiques, la physique, le langage de programmation, ou encore l'informatique sous forme ludique.
Plusieurs activités sont proposées durant toute l'année autour de la conception, la fabrication et la programmation de robots où différents aspects techniques seront abordés sur chaque robot tels que la mécanique, l'électronique et le codage.
Au-delà des compétences techniques, le club de robotique favorise également le développement de compétences transversales telles que la créativité, la résolution de problèmes et le travail d’équipe. Les élèves seront amenés à collaborer et à partager leurs idées pour atteindre un objectif commun. Notre club de robotique est un véritable espace de partage, d’apprentissage et d’expérimentation.
Encadrés par le Fabmanager du FAN, compétent et passionné, ils apprennent à concevoir et construire des éléments mécaniques et électroniques du robot à partir de modèles ou de leur propre création.
À travers ce club, les collégiens exploitent l'informatique (programmation, comparaison de stratégies) et travaillent la démarche d'investigation : mis en situation d'autonomie, mettre en place d'une stratégie, réaliser des essais, valider ou invalider la méthode, comprendre d'où vient le problème et corriger en conséquence le programme.
Les collégiens découvrent les différentes fonctionnalités des capteurs, pour prendre connaissance de l'environnement, ainsi que des moteurs permettant les déplacements du robot (avancer, reculer, tourner à droite ou à gauche, effectuer des manœuvres).
Différents types de robots seront fabriqués durant l'année pour assurer des opérations selon les applications et les missions à mener : robot mobile à 2 ou 4 roues, bras robotique, robot à 4 ou 6 pattes....
A qui s'adresse-t-il ?
Ce club s'adresse principalement aux collégiens et aux lycéens.
Horaires
Les activités du club sont organisées sur les horaires suivants en période scolaire:
- 6ème/5ème : 14h-15h30
- 4ème/3ème : 16h 17h30
Pas d'activité au club pendant les vacances scolaires.
Lieu et encadrement
Fablab de l'IUT de Haguenau
30 rue du Maire André Traband
67500 Hagueanu
Encadré par le Fabmanager du Fablab
Planning de l'année scolaire 2023-2024
Le planning se décompose en 3 cycles de 3 mois avec un robot par cycle. Les difficultés de chaque cycle est progressif.
1er cycle : Le contenu est entièrement donnés, que cela soit du schéma de câblage au instruction de construction en passant par la programmation des robots.
2ème cycle : Les participants doivent réfléchir comment créer la pièce, quelle forme est optimal, le programme est pré-construit et une aide leur ai proposé.
3ème cycle : Seul le "type de robot" leurs est donné, ils devront réfléchir à quelle esthétique lui donner, quels capteurs utiliser, comment l'assembler, comment le programmer.
Chaque cycles, est composé de 3 phases de 13 séances :
- La conception mécanique et électronique.
- La fabrication mécanique et électronique
- La programmation (Scratch, Python...)
Ces 3 phases ne sont pas dans un ordre précis, les phases peuvent être mélanger et dans un ordre différent pour chaque cycles.
1er cycle : Little Bot
Le premier cycle, consistera à fabriquer le robot appelé LittleBot.
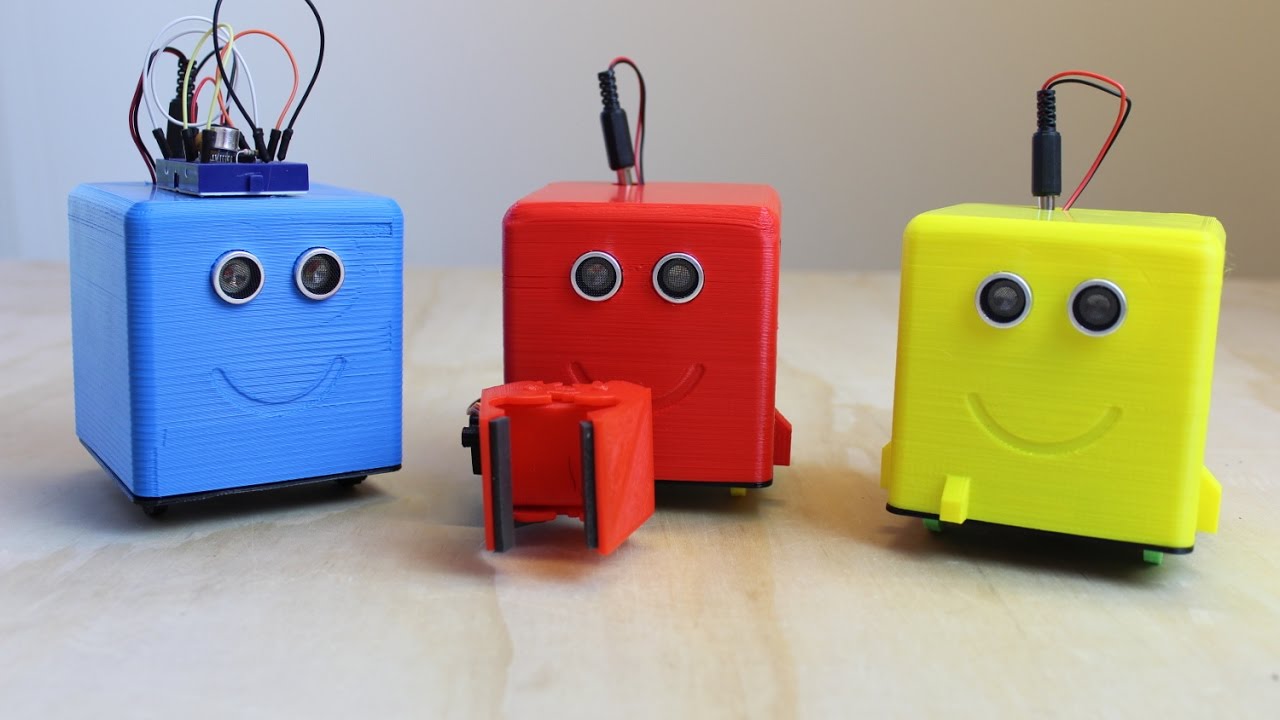
Pour ce robot, nous utiliserons un codage en Mblock (structure Scratch) ainsi que l'utilisation du logiciel Fusion360.
Durant ce cycle, nous apprendrons à utiliser une imprimante 3D mais aussi des composants pour de l'électronique.
Nous découvrirons les principes et le fonctionnement du capteur ultrason ainsi que des servomoteurs.
Le programme, le câblage et l'assemblage vous sera donné pour la réalisation de ce projet.
L'objectif final de ce cycle est de faire avancer le robot, le faire tourner et de lui faire éviter des objets.
2ème cycles
Le deuxième cycles, sera un robot type segway.
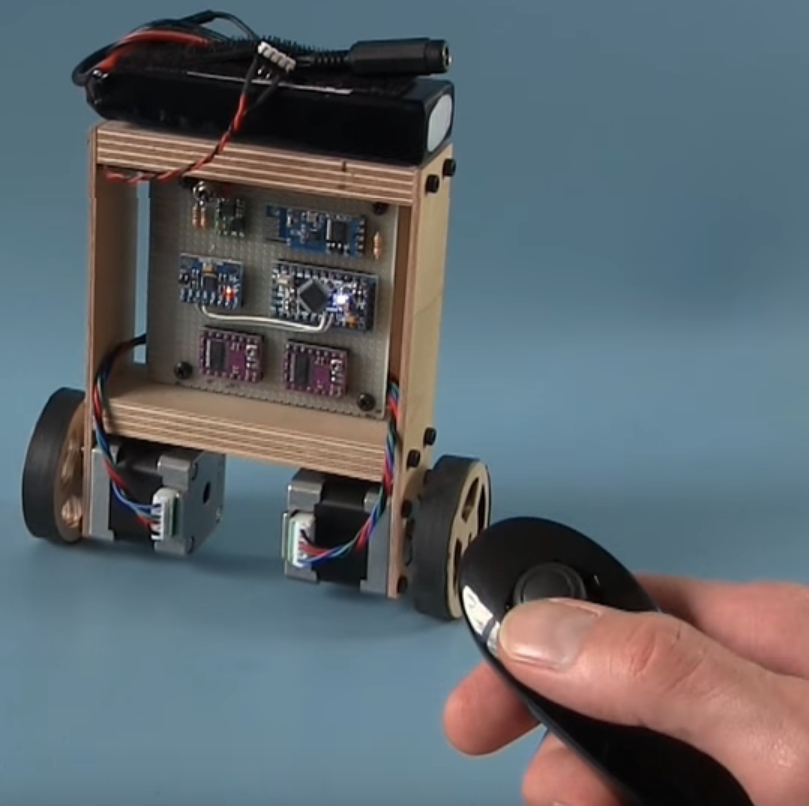
Pour ce robot, nous utiliserons le langage C++ (Arduino) pour le faire fonctionner ainsi que l'utilisation du logiciel Fusion360.
Durant ce cycle, nous apprendrons à utiliser plusieurs types de capteurs tel quel l'infrarouge et le gyroscopique.
Nous apprendrons comment fonctionne une télécommande et nous ferons fonctionner notre robot avec celle-ci.
Le programme, le câblage et l'assemblage vous sera donné partiellement pour ce projet.
L'objectif final de ce cycle est de comprendre la cinématique d'un "segway", garder une stabilité avec ce robot et faire avancer celui-ci.
3ème cycles
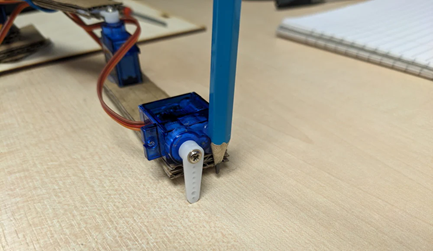
Le cycle 3 sera un robot de type "araignée" et/ou type traceur de découpe

Pour ce robot, nous utiliserons le langage C++ (Arduino) pour le faire fonctionner ainsi que l'utilisation du logiciel Fusion360.
Durant ce cycle, nous utiliserons plusieurs servomoteur ainsi qu'un capteur ultrason, un haut parleur et un micro
L'objectif final de ce cycle est de comprendre la cinématique d'un robot à 4 pattes et ses déplacement ainsi que le déplacer en utilisant uniquement le son de notre voix.
En ce qui concerne le traceur, nous le coderons en C++ et nous utiliserons fusion 360 pour l'impression 3D.
Nous utiliserons des moteurs pas à pas ainsi que des servomoteurs pour le déplacement du crayon.
L'objectif est de construire un traceur de découpe permettant de dessiner avec une image vectoriel.
Le programme, le câblage et l'assemblage vous sera pas donné pour la réalisation de ce projet. Seul le type de robot vous sera donné, à vous de le contruire de A à Z.