
Qu'est ce qu'un capteur ultrason ?
 HC-SR04 capteur ultrasonique est principalement utilisé pour la mesure de distance. En émettant des ondes ultrasoniques et en mesurant le temps pris par ces ondes pour rebondir après avoir frappé un objet, le HC-SR04 peut déterminer avec précision la distance à laquelle cet objet se trouve.
HC-SR04 capteur ultrasonique est principalement utilisé pour la mesure de distance. En émettant des ondes ultrasoniques et en mesurant le temps pris par ces ondes pour rebondir après avoir frappé un objet, le HC-SR04 peut déterminer avec précision la distance à laquelle cet objet se trouve.
De par son coût abordable et sa facilité d’intégration avec des plateformes telles qu’Arduino, le HC-SR04 est devenu un choix prisé parmi les amateurs de bricolage et les professionnels.
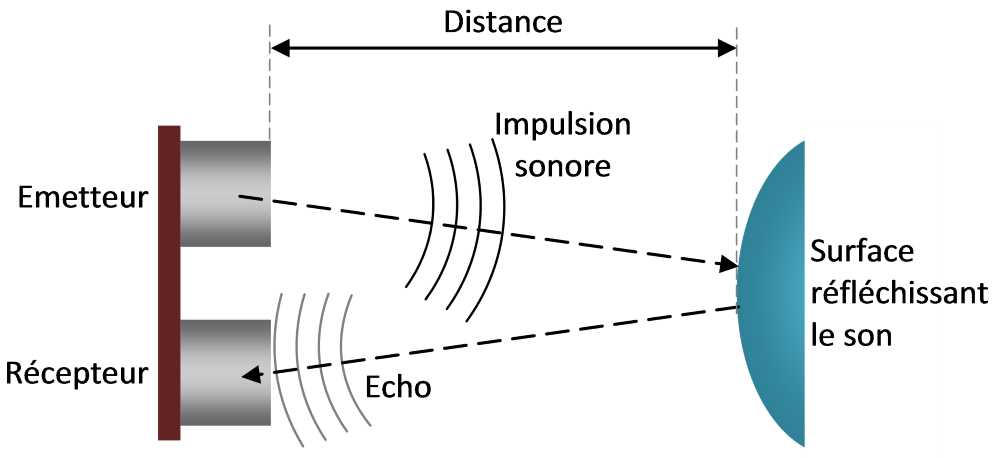
Le fonctionnement de l’HC-SR04 est assez simple. Il comporte deux éléments principaux : un émetteur ultrasonique et un récepteur ultrasonique. Voici les étapes clés du fonctionnement du capteur :
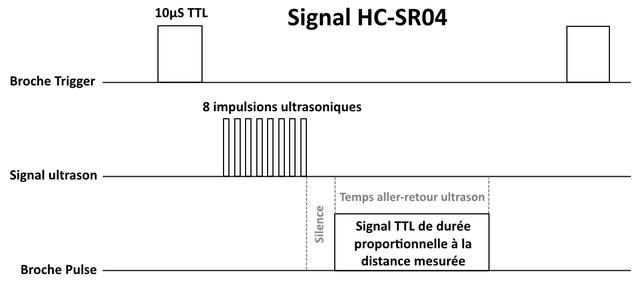
- Lorsque le capteur est alimenté, l’émetteur envoie une série de 8 impulsions ultrasoniques de 10µs à une fréquence spécifique (généralement de 40 kHz).
- Lorsque ces impulsions sonores atteint un objet, elle rebondit et est renvoyée vers le récepteur ultrasonique comme un écho.
- Le récepteur mesure le temps entre le moment où l’impulsion a été émise et celui où l’écho a été reçu.
- En utilisant la vitesse connue du son dans l’air (environ 343 m/s ou 34,3 cm/µs) et la durée de l’écho mesurée, le capteur calcule la distance jusqu’à l’objet en utilisant la formule : distance = (durée de l’écho / 2) * vitesse du son.
- Le résultat est ensuite converti en une distance numérique et envoyé au Arduino via une sortie numérique
Le capteur :

| Broche | Description |
|---|---|
| VCC | Il s’agit de la broche d’alimentation. Elle nécessite généralement une entrée de 5V DC, la rendant compatible avec des cartes comme Arduino. |
| Trig (Déclenchement) | Cette broche est utilisée pour initier le capteur à émettre une onde ultrasonique. En envoyant une impulsion haute d’au moins 10µs à cette broche, le HC-SR04 émettra une série de 8 cycles de son ultrasonique à 40 kHz. |
| Echo | Une fois l’onde ultrasonique émise et qu’elle rebondit après avoir frappé un objet, la broche Echo fournit une impulsion de sortie. La largeur de cette impulsion est proportionnelle à la distance de l’objet par rapport au capteur. En mesurant la durée de cette impulsion, Arduino peut déterminer la distance jusqu’à l’objet. |
| GND (Masse) | Cette broche est connectée à la masse du circuit. |
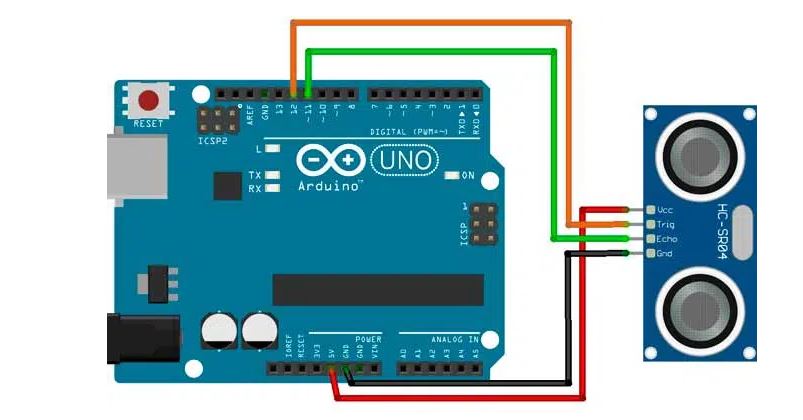
Le câblage :
Pour connecter le capteur HC-SR04 à une carte Arduino, suivez ces étapes :
- Connectez la broche VCC du HC-SR04 à la broche 5V sur la carte arduino uno. Cela assure que le capteur reçoit la puissance nécessaire pour son fonctionnement.
- Reliez la broche GND (Masse) du HC-SR04 à l’une des broches de masse (GND) d’ Arduino. Cela établit une masse électrique commune entre le capteur et arduino.
- Connectez la broche Trig du HC-SR04 à une broche numérique d’Arduino, par exemple, la broche D12. Cette broche est responsable de l’envoi d’un signal pour déclencher le capteur afin qu’il émette son onde ultrasonique.
- Reliez la broche Echo du HC-SR04 à une autre numérique sur l’Arduino, comme la broche D11. Cette broche détecte l’onde ultrasonique de retour une fois qu’elle se réfléchit sur un objet.
Programmer un HC-SR04
Ce code permet de mesurer une distance et de l'afficher sur le serial print du logiciel Arduino IDE.
// définition des numéros de broches
const int trigPin = 12;
const int echoPin = 11; // définition des variables
long duration;
int distance;
void setup()
{
pinMode(trigPin, OUTPUT); // Définit le trigPin comme sortie
pinMode(echoPin, INPUT); // Définit le echoPin comme entrée
Serial.begin(9600); // Commence la communication série
}
void loop()
{
// Efface le trigPin
digitalWrite(trigPin, LOW);
delayMicroseconds(2); // Met le trigPin à l'état HIGH pendant 10 microsecondes
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW); // Lit le echoPin, renvoie le temps de trajet de l'onde sonore en microsecondes
duration = pulseIn(echoPin, HIGH); // Calcul de la distance
distance = duration * 0.034 / 2; // La vitesse du son est d'environ 0.034 cm par microseconde
Serial.print(“Distance: “); // Affiche la distance sur le moniteur série
Serial.println(distance);
}