
RC Car - Voiture modélisme radiocommandée
Pilotage depuis le clavier d'un PC
via la liaison série Arduino-USB
- Sans contrôle de vitesse des moteurs CC
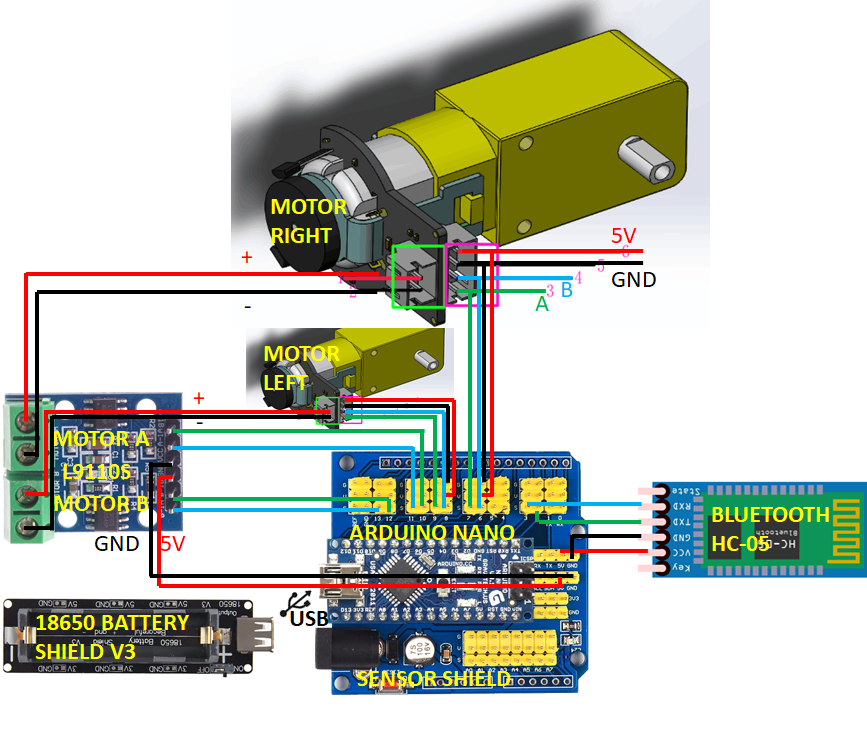
//Voiture modélisée radiocommandée (RC car) avec deux moteurs CC à l'arrière et un servomoteur de direction
// A COMPLETER pour le servo //
//Le port série matériel de l'Arduino Nano (Pins 0/RX et 1/TX) est déjà utilisé pour la liaison Arduino-USB avec l'ordinateur
//On utilise donc une liaison série logicielle pour la liaison Arduino-HC05 avec le module Bluetooth
#include <SoftwareSerial.h> //Software Serial Port
#define RxDpin 2 //Pin Digital 2 pour arduino Rx (pin0=serial)
#define TxDpin 3 //Pin Digital 3 pour arduino Tx (pin1)
//Pour la liaison SoftwareSerial Arduino-HC05, quand on veut configurer le HC-05
//on maintient le bouton à côté de la PIN EN/KEY enfoncé au démarrage de l'Arduino
// #define baudrate 38400 //Vitesse pour la liaion Arduino-HC05 en mode configuration
//Pour la liaison SoftwareSerial Arduino-HC05, quand on veut communiquer à travers le bluetooth depuis un smartphone,
//on appaire le HC-05 depuis l'appli avec le mot-de-passe par défaut : 1234
#define baudrate 9600 //Vitesse pour la liaion Arduino-HC05 en mode utilisation smartphone
SoftwareSerial BTSerie(RxDpin,TxDpin);
char caractereTexte;
String phraseTexte;
void setup()
{
Serial.begin(9600); //Vitesse (baudRate) pour la liaison Arduino-USB
delay(500);
//Configuration de la liaison SoftwareSerial avec le HC-05
pinMode(RxDpin, INPUT); //Configuration du Pin RxD (Receive) en mode entrée
pinMode(TxDpin, OUTPUT); //Configuration du Pin TxD (Transmit) en mode sortie
BTSerie.begin(baudrate); //Vitesse pour la liaion Arduino-HC05
if (baudrate==38400) {
Serial.println("En mode communication USB - Pret pour les commandes AT");
Serial.println("Le HC-05 doit clignoter lentement (2 secondes)");
}
else if (baudrate==9600){
Serial.println("En mode smartphone - Pret pour être appairé");
Serial.println("Le HC-05 doit clignoter rapidement avant d'être appairé");
}
else{
Serial.println("La vitesse de communication (baudrate) a été personnalisée");
}
delay(500);
pinMode(13,OUTPUT); //left motors forward
pinMode(12,OUTPUT); //left motors reverse
pinMode(11,OUTPUT); //right motors forward
pinMode(10,OUTPUT); //right motors reverse
pinMode(9,OUTPUT); //Led
pinMode(5,OUTPUT); //SG90 steering motor
// A COMPLETER pour le servo //
//myservo.attach(5); // attaches the servo on pin 5 to the servo object
}
void loop() {
// Serial.write(blueToothSerial.read());
//On lit caractere par caractere sur la liaion Arduino-HC05 et on affiche sur la liaison Arduino-USB
if (BTSerie.available()) {
caractereTexte = BTSerie.read();
Serial.print(caractereTexte);
}
//On lit caractere par caractere sur la liaion Arduino-USB et on affiche sur la liaison Arduino-HC05
if (Serial.available()) {
caractereTexte = Serial.read();
BTSerie.write(caractereTexte);
// Serial.println("Caractere envoye vers bluetooth : ");
// Serial.println(caractereRecu);
// }
if(caractereTexte == 'F'){ //F comme Forward - avancer (tous les moteurs vers l'avant, servo à 90°)
digitalWrite(10,LOW);
digitalWrite(11,HIGH);
digitalWrite(12,LOW);
digitalWrite(13,HIGH);
}
else if(caractereTexte == 'B'){ //B comme Backward reculer (tous les moteurs en sens inverse, servo à 90°)
digitalWrite(10,HIGH);
digitalWrite(11,LOW);
// A COMPLETER //
}
else if(caractereTexte == 'L'){ //L comme Left - tourner à gauche (moteur de droite vers l'avant, gauche à l'arrêt, servo à 120°)
// A COMPLETER //
}
else if(caractereTexte == 'R'){ //R comme Right - tourner à droite (moteur de gauche vers l'avant, droite à l'arrêt, servo à 60°)
// A COMPLETER //
}
else if(caractereTexte == 'S'){ //STOP (tous les moteurs à l'arrêt, servo à 90°)
// A COMPLETER //
}
delay(100);
}
}Pilotage bluetooth avec contrôle de la vitesse des moteur
Depuis un smartphone
Depuis le moniteur série d'Arduino IDE
Source : https://www.instructables.com/View-Serial-Monitor-Over-Bluetooth/#
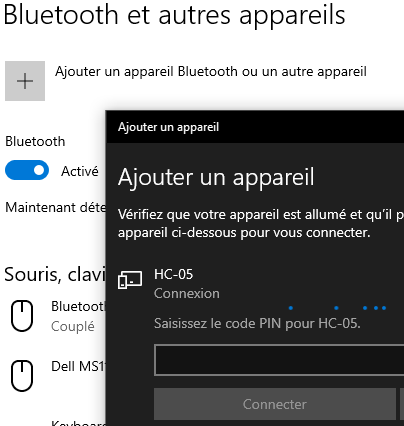
- Ajouter le HC-05 dans Windows depuis les périphériques bluetooth et saisir le code PIN
1234
- Dans Arduino IDE
- Sélectionner le port série correspondant au HC-05. Il y en a deux, tester les deux
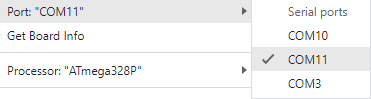
- Ouvrir le moniteur série

- Envoyer les commandes de pilotage :
F,B,L,R,S.
//source Sample Code 2 https://wiki.dfrobot.com/Micro_DC_Motor_with_Encoder-SJ01_SKU__FIT0450#target_3
//The sample code for driving one way motor encoder
#include <PID_v1.h>
const byte encoder0pinA = 0;//A pin -> the interrupt pin 0
const byte encoder0pinB = 1;//B pin -> the digital pin 3
const byte encoder0pinA_2 = 8;//A pin -> the interrupt pin 0
const byte encoder0pinB_2 = 9;//B pin -> the digital pin 3
// int E_left =5; //The enabling of L298PDC motor driver board connection to the digital interface port 5
// int M_left =4; //The enabling of L298PDC motor driver board connection to the digital interface port 4
int MOTEUR_A_1 =12; //Connexion du pilote de moteur CC l9110s au port digital 5
int MOTEUR_A_2 =13; //Connexion du pilote de moteur CC l9110s au port digital 6
int MOTEUR_B_1 =10; //Connexion du pilote de moteur CC l9110s au port digital 5
int MOTEUR_B_2 =11; //Connexion du pilote de moteur CC l9110s au port digital 6
byte encoder0PinALast;
double duration,abs_duration;//the number of the pulses
boolean Direction;//the rotation direction
boolean result;
double val_output;//Power supplied to the motor PWM value.
double Setpoint;
double Kp=0.6, Ki=5, Kd=0;
PID myPID(&abs_duration, &val_output, &Setpoint, Kp, Ki, Kd, DIRECT);
#include <Servo.h>
#define trigPin 6
#define echoPin 7
// #define EncoderInit
Servo servo1;
Servo servo2;
Servo monServo;
//Le port série matériel de l'Arduino Nano (Pins 0/RX et 1/TX) est déjà utilisé pour la liaison Arduino-USB avec l'ordinateur
//On utilise donc une liaison série logicielle pour la liaison Arduino-HC05 avec le module Bluetooth
#include <SoftwareSerial.h> //Software Serial Port
#define RxDpin 2 //Pin Digital 2 pour arduino Rx (pin0=serial)
#define TxDpin 3 //Pin Digital 3 pour arduino Tx (pin1)
//Pour la liaison SoftwareSerial Arduino-HC05, quand on veut configurer le HC-05
//on maintient le bouton à côté de la PIN EN/KEY enfoncé au démarrage de l'Arduino
// #define baudrate 38400 //Vitesse pour la liaion Arduino-HC05 en mode configuration
//Pour la liaison SoftwareSerial Arduino-HC05, quand on veut communiquer à travers le bluetooth depuis un smartphone,
//on appaire le HC-05 depuis l'appli avec le mot-de-passe par défaut : 1234
#define baudrate 9600
#include <Servo.h>
Servo myservo; // create servo object to control a servo
SoftwareSerial BTSerie(RxDpin,TxDpin);
char caractereTexte;
String phraseTexte;
void setup()
{
Serial.begin(9600);//Initialize the serial port
pinMode(MOTEUR_A_1, OUTPUT); //L298P Control port settings DC motor driver board for the output mode
pinMode(MOTEUR_A_2, OUTPUT);
pinMode(MOTEUR_B_1, OUTPUT); //L298P Control port settings DC motor driver board for the output mode
pinMode(MOTEUR_B_2, OUTPUT);
Setpoint =80; //Set the output value of the PID
myPID.SetMode(AUTOMATIC);//PID is set to automatic mode
myPID.SetSampleTime(100);//Set PID sampling frequency is 100ms
EncoderInit();//Initialize the module
pinMode(RxDpin, INPUT); //Configuration du Pin RxD (Receive) en mode entrée
pinMode(TxDpin, OUTPUT); //Configuration du Pin TxD (Transmit) en mode sortie
BTSerie.begin(baudrate);
// Commandes AT pour le HC-05
// BTSerie.print("AT+NAME?"); //Demande le nom du module. Noter le ?
// BTSerie.print("AT+NAME=RCcar-HC-05-1"); //Définir le nom du module.
BTSerie.print("AT+VERSION?"); //Demande le N° de version. Noter le ?
// BTSerie.print("AT+UART?"); //Demande la vitesse série (baudrate). Noter le ?
// BTSerie.print("AT+UART=57600,0,0"); //Définir la vitesse série (baudrate).
// BTSerie.print("AT+ROLE?"); //Demande le mode du module, maitre ou esclave. Noter le ?
// BTSerie.print("AT+PSWD?"); //Demande le mot-de-passe du module. Noter le ?
// La console série de l'ordinateur d'où l'on envoie les commandes AT doit être réglée de telle sorte que
// les fins de ligne soient « les deux, NL et CR », ce qui revient à envoyer \r\n à la fin de chaque commande.
BTSerie.print("\r\n"); // sur HC-05, toutes les commandes doivent se terminer par \r\n
// afficher ce que le module bluetooth répond
Serial.print( BTSerie.read() ); // afficher sur la console ce qui est lu sur BT
// pour AT+VERSION?, c'est le n° de version puis OK qui s'affiche
if (baudrate==38400) {
Serial.println("En mode communication USB - Pret pour les commandes AT");
Serial.println("Le HC-05 doit clignoter lentement (2 secondes)");
}
else if (baudrate==9600){
Serial.println("En mode smartphone - Pret pour être appairé");
Serial.println("Le HC-05 doit clignoter rapidement avant d'être appairé");
}
else{
Serial.println("La vitesse de communication (baudrate) a été personnalisée");
}
monServo.attach(5);
delay(500);
pinMode(13,OUTPUT); //left motors forward
pinMode(12,OUTPUT); //left motors reverse
pinMode(11,OUTPUT); //right motors forward
pinMode(10,OUTPUT); //right motors reverse
pinMode(9,OUTPUT); //Led
pinMode(5,OUTPUT); //SG90 steering motor
// A COMPLETER pour le servo //
//myservo.attach(5); // attaches the servo on pin 5 to the servo object
}
void loop()
{
//On lit caractere par caractere sur la liaion Arduino-USB et on affiche sur la liaison Arduino-HC05
if (Serial.available()) {
caractereTexte = Serial.read();
BTSerie.write(caractereTexte);
// Serial.println("Caractere envoye vers bluetooth : ");
// Serial.println(caractereRecu);
}
//On lit caractere par caractere sur la liaion Arduino-HC05 et on affiche sur la liaison Arduino-USB
if (BTSerie.available()) {
caractereTexte = BTSerie.read();
Serial.print(caractereTexte);
// }
if(caractereTexte == 'F'){ //move forward(all motors rotate in forward direction)
advance();//Motor Forward
monServo.write(90); // sets the servo position according to the scaled value
}
else if(caractereTexte == 'B'){ //move reverse (all motors rotate in reverse direction)
back();//Motor reverse
monServo.write(90); // sets the servo position according to the scaled value
}
else if(caractereTexte == 'L'){ //turn right (left side motors rotate in forward direction, right side motors doesn'caractereRecu rotate)
left();
monServo.write(60); // sets the servo position according to the scaled value
}
else if(caractereTexte == 'R'){ //turn left (right side motors rotate in forward direction, left side motors doesn'caractereRecu rotate)
right();
monServo.write(120); // sets the servo position according to the scaled value
}
else if(caractereTexte == 'S'){ //STOP (all motors stop)
Stop();
monServo.write(90);
}
abs_duration=abs(duration);
result=myPID.Compute();//PID conversion is complete and returns 1
if(result)
{
Serial.print("Pluse: ");
Serial.println(duration);
duration = 0; //Count clear, wait for the next count
} // sets the servo position according to the scaled value
}
}
void EncoderInit()
{
Direction = true;//default -> Forward
pinMode(encoder0pinB,INPUT);
attachInterrupt(0, wheelSpeed, CHANGE);
}
void wheelSpeed()
{
int Lstate = digitalRead(encoder0pinA);
if((encoder0PinALast == LOW) && Lstate==HIGH)
{
int val = digitalRead(encoder0pinB);
if(val == LOW && Direction)
{
Direction = false; //Reverse
}
else if(val == HIGH && !Direction)
{
Direction = true; //Forward
}
}
encoder0PinALast = Lstate;
if(!Direction) duration++;
else duration--;
}
void advance()//Motor Forward
{
digitalWrite(MOTEUR_A_1,LOW);
digitalWrite(MOTEUR_A_2,val_output);
digitalWrite(MOTEUR_B_1,val_output);
digitalWrite(MOTEUR_B_2,LOW);
}
void back()//Motor reverse
{
digitalWrite(MOTEUR_A_1,val_output);
digitalWrite(MOTEUR_A_2,LOW);
digitalWrite(MOTEUR_B_1,LOW);
digitalWrite(MOTEUR_B_2,val_output);
}
void left()
{
digitalWrite(MOTEUR_A_1,LOW);
digitalWrite(MOTEUR_A_2,val_output);
digitalWrite(MOTEUR_B_1,LOW);
digitalWrite(MOTEUR_B_2,LOW);
}
void right()
{
digitalWrite(MOTEUR_A_1,LOW);
digitalWrite(MOTEUR_A_2,LOW);
digitalWrite(MOTEUR_B_1,val_output);
digitalWrite(MOTEUR_B_2,LOW);
}
void Stop()//Motor stops
{
digitalWrite(MOTEUR_A_1, LOW);
digitalWrite(MOTEUR_A_2, LOW);
digitalWrite(MOTEUR_B_1, LOW);
digitalWrite(MOTEUR_B_2, LOW);
}
Sources
https://github.com/himanshus2847/Bluetooth-Controlled-Robot-using-Arduino