
Machine Learning LeRobot avec SO-ARM101
Installation et prérequis
Prérequis pour l'entraînement et l'exécution d'un modèle d'IA :
- Une carte graphique NVidia et une installation de Cuda
- L'exécution semble OK sur une Quadro P620
- L'entrainement avec 100 épisodes et 100 000 steps a mis 12H sur une RTX 2080 Super de 2019
batch_size=8alors qu'il faut un minimum de 16, et dans l'idéal 64- Il n'aboutit pas au bout de plus de 24H sur une Quadro P620 (via WSL2 et Docker)
- Config minimum pour ACT
batch_size=1516:- Tesla T4 (gratuit 5H / mois sur Google Colab) on a 15G de RAM qui permet donc un
batch_size=15 - https://github.com/huggingface/lerobot/issues/2213
- Tesla T4 (gratuit 5H / mois sur Google Colab) on a 15G de RAM qui permet donc un
- Config recommandée pour ACT
batch_size=64:- A100 (12€ les 100 compute units, 70 = ~5H sur Google Colab) on a 80G de RAM qui permet donc un
batch_size=64 - https://github.com/huggingface/lerobot/blob/main/docs/source/notebooks.mdx#training-act
- https://colab.research.google.com/github/antonilo/real_world_robot_learning_sp25/blob/main/_tutorials/lerobot_tutorial/lerobot_tutorial.ipynb#scrollTo=ff7eafe4
- A100 (12€ les 100 compute units, 70 = ~5H sur Google Colab) on a 80G de RAM qui permet donc un
Installation sous Linux
- Installer Miniconda pour Linux : l'environnement de développement Python
wget https://repo.anaconda.com/miniconda/Miniconda3-latest-Linux-x86_64.sh
# Vérifier que la clé SHA256 de Miniconda3-latest-Linux-x86_64.sh ici : https://repo.anaconda.com/miniconda/ correspond à :
sha256sum ~/Miniconda3-latest-Linux-x86_64.sh
bash ~/Miniconda3-latest-Linux-x86_64.sh
source ~/.bashrc- Créer et activer l'environnement Conda
conda create -y -n lerobot python=3.10
conda activate lerobot
git clone https://github.com/huggingface/lerobot.git ~/lerobot
conda install ffmpeg=7.1.1 -c conda-forge
cd ~/lerobot && pip install -e ".[feetech]"- A chaque ouverture de Terminal l'environnement python conda est activé, voir au bas du
~/.bashrc - Pour éviter les conflits, on propose d'avoir un fichier
~/.bashrc_condapour conda et un~/.bashrc_rospour ros
Astuces pour activer/désactiver l'environnement conda sans passer par la modification du ~/.bashrc :
- Ne pas activer conda au démarrage :
conda config --set auto_activate_base false - Ne pas configurer le shell pour initialiser conda au démarrage :
conda init --reverse $SHELL
Installation Windows
- Le compte utilisateur doit avoir les droits pour créer des raccourcis (liens symboliques) dans les sous-dossiers de
C:\Users\$USER\lerobot\outputs\train\ - Ils seront utilisés lors de l'entraînement pour créer un lien entre le dossier
lastet le dossier du dernier Checkpoint par ex.100000- Le plus sûr est de travailler avec un compte administrateur
- Il faut peut-être aussi les droits dans le dossier
C:\Users\$USER\.cache\huggingface\lerobot\$HUGGINGFACE_USER
- Installer Miniconda pour Windows : l'environnement de développement Python
- Ouvrir
Anaconda PowerShell Prompt - Créer et activer l'environnement Conda
conda create -y -n lerobot python=3.10
conda activate lerobot
git clone https://github.com/huggingface/lerobot.git ~/lerobot- Installer Pytorch pour la version de Cuda installée sur votre système (testé avec une version Cuda 127 installée et la version cu128 de Pytorch) et autres dépendances nécessaires
cd ~/lerobot
# pip install av poetry-core
conda install ffmpeg=7.1.1 -c conda-forge
pip3 install --pre torch torchvision torchaudio --index-url https://download.pytorch.org/whl/cu128
pip install -e ".[feetech]"Récupérer les infos système pour débuguer l'installation si les scripts basculent sur le cpu :
python lerobot/scripts/display_sys_info.pypython -m torch.utils.collect_envpython -c "import torch; print(torch.cuda.is_available())" && nvcc -V- cf. https://github.com/huggingface/lerobot/issues/928 > Here for additional information of my full installation.
Creer un compte HuggingFace et se login via un token
- Se créer un compte sur https://huggingface.co/settings/tokens
- Aller dans le menu > Access Tokens
- Récupérer un
TOKENavec des droits en écriture - Ouvrir un Anaconda PowerShell lerobot
(lerobot) PS C:\Users\gauthier.hentz\github\lerobot> - Login avec le Token
huggingface-cli.exe login --token TOKEN
Vous pouvez maintenant uploader et downloaded des DataSets et Modèles vers le Hub HuggingFace pour collaborer avec des experts du Machine Learning.
Essai de déploiement sur Windows via WSL2, Docker, et Dev Container
Pour l'instant pas de test satisfaisant pour l'exécution d'un modèle sur le vrai robot. Passer au WSL2 les ports USB où sont connectés les robots et caméras fait crasher le conteneur. Probablement que la communication série n'est pas supporté.
- Cloner https://github.com/huggingface/lerobot dans un conteneur WSL2, par exemple Ubuntu
- Depuis le conteneur Ubuntu, ouvrir un Terminal, se placer dans le répertoire cloné
cd ~/lerobot_devcontainer, et lancer Visual Studio Code en tapantcode . - Ajouter un répertoire
~/lerobot_devcontainer/.devcontaineret un fichier dedans~/lerobot_devcontainer/.devcontainer/devcontainer.jsoncontenant :
{ "build": { // Path is relative to the devcontainer.json file. "dockerfile": "../docker/lerobot-gpu-dev/Dockerfile" }} - Lancer la commande VSCode : Reopen in container
Tentatives pour faire passer le port série à WSL2 :
wsl --shutdown
winget install --interactive --exact dorssel.usbipd-win
usbipd list
wmic diskdrive list brief
wsl --mount \\.\PHYSICALDRIVE1
wsl.exe --version
wsl --mount \\.\PHYSICALDRIVE1 --bare
wsl --mount \\.\PHYSICALDRIVE1 --partition 2 --type ext4
wsl --shutdown
ipconfig
net localgroup docker-users "gauthier.hentz" /ADD
wsl --set-default ubuntu
exit
wsl --shutdown
usbipd list
usbipd bind --busid 1-1
usbipd list
usbipd attach --wsl --busid 1-1
usbipd attach --wsl --busid 2-1
usbipd attach --wsl --busid 2-2
usbipd attach --wsl --busid 2-3
usbipd list
usbipd attach --wsl --busid 1-1
usbipd list
usbipd attach --wsl --busid 1-1
usbipd attach --wsl --busid 3-3
usbipd attach --wsl --busid 2-3
usbipd attach --wsl --busid 2-2
usbipd attach --wsl --busid 3-2
usbipd attach --wsl --busid 3-1
exitBanc de Machine Learning LeRobot
Configurer les servomoteurs
La carte FE-URT-1 fournie par Feetech n'est pas détectée sous Ubuntu à cause d'un conflit avec un paquet de brail. On le désinstalle :
sudo apt-get autoremove brlttyhttps://askubuntu.com/questions/1321442/how-to-look-for-ch340-usb-drivers/1472246#1472246
https://github.com/huggingface/lerobot/blob/main/examples/10_use_so100.md#c-configure-the-motors
- Brancher la carte
- Trouver l'interface USB sur laquelle est branchée la carte
python lerobot/scripts/find_motors_bus_port.py
-
- Sous Linux, par ex.
/dev/ttyACM0ou/dev/ttyUSB0 - Sous Windows, par ex.
COM13ouCOM14
- Sous Linux, par ex.
- Sous Linux, Changer les droits sur les interfaces USB
sudo chmod 666 /dev/ttyACM0
sudo chmod 666 /dev/ttyACM1- Ouvrir Codium > File > Open Folder >
admin_ros/lerobot - Modifier le fichier de config
gedit ~/lerobot/lerobot/common/robot_devices/robots/configs.py
- Chercher la config du So100 en ligne 436
class So100RobotConfig(ManipulatorRobotConfig): - Remplacer
port="/dev/tty.usbmodem58760431091",pour leleader_arms(L446) et lefollower_arms(L463) par le port découvert - Brancher les servos un à un à la carte puis lancer le script d'initialisation, en incrémentant l'ID à chaque fois :
python lerobot/scripts/configure_motor.py \
--port /dev/tty.usbmodem58760432961 \
--brand feetech \
--model sts3215 \
--baudrate 1000000 \
--ID 1- Au fur et à mesure les brancher en série et/ou noter l'ID sur le moteur
- Les servos sont bougés à leur position centrale et l'offset mis à 0
Ne plus bouger les servos jusqu'à l'assemblage
Construction et assemblage mécanique
Une version 101 est sortie en 05/2025. Le Leader est plus simple à assembler, et plus besoin de démonter les servos pour enlever un engrenage et les rendre passifs. Il suffit d'acheter le kit de 6 servos avec 3 rapports de transmission différents :
- https://github.com/TheRobotStudio/SO-ARM100?tab=readme-ov-file#getting-your-own-so101
- https://www.alibaba.com/product-detail/6PCS-7-4V-STS3215-Servos-for_1601428584027.html?spm=a2747.product_manager.0.0.757c2c3clU7uH3
- Imprimer la mâchoire statique intégrant le support de caméra : https://github.com/TheRobotStudio/SO-ARM100/blob/main/Optional/Wrist_Cam_Mount_32x32_UVC_Module/README.md
- Suivre le guide d'assemblage pour le SO101 : https://huggingface.co/docs/lerobot/so101#step-by-step-assembly-instructions
- Pour le SO100 : https://huggingface.co/docs/lerobot/so100#step-by-step-assembly-instructions
Astuces pour l'assemblage
- Mettre une vis sur l'arbre moteur et l'axe passif (à l'opposée de l'arbre moteur) quand il y a la place d'en mettre une (vérifier qu'il y aura la place après assemblage des éléments autour du moteur)
- Ne plus bouger les servos après leur initialisation qui les met à l'angle 0. Dans l'idéal, assembler les éléments de manière à ce que le robot soit en configuration initiale avec tous les moteurs à 0
- En pratique, on monte le robot dans la configuration ci-dessous. C'est l'étape de calibration qui permettra de définir un offset pour que le zéro des moteurs corresponde au modèle cinématique du SO-ARM10X
- Il est possible d'ajouter un offset dans la configuration des servomoteurs, par exemple via les scripts du projet LeRobot
- Attention si vous démarrez le robot sous ROS avant d'avoir lancer la calibration LeRobot qui fixe l'Offset dans les servomoteurs, vous risquez de casser le robot
Agencement des caméras et robots
Le nombre, le positionnement et la qualité des caméras sont importants pour la qualité du DataSet :
- Plusieurs setup sont proposés :
- Caméras d'environnement : https://github.com/TheRobotStudio/SO-ARM100?tab=readme-ov-file#2-overhead-camera-mount
- Caméras de poignet : https://github.com/TheRobotStudio/SO-ARM100?tab=readme-ov-file#5-wristmount-cameras
- Attention au champ de vision des caméras si vous prenez une de vos webcams
- Il risque de ne pas être assez "fish eye"
- Par exemple, la WebCam Logitech C270 (720p) a un champ trop étroit pour être intégrée au module Overhead
Au FabLab de IUT Haguenau
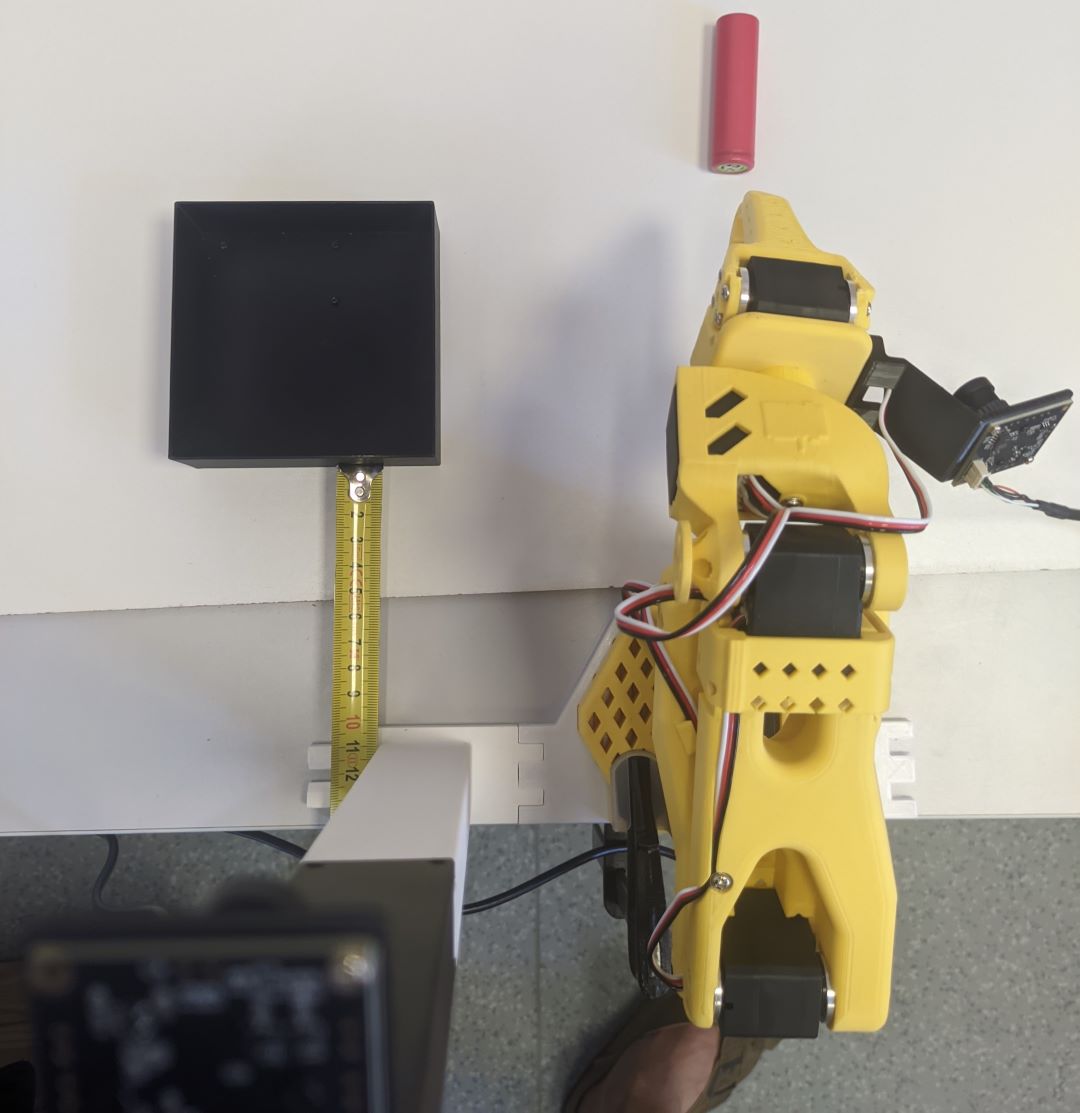
- On choisit de prendre deux caméras au format 32 x 32 , la version 1080p permet d'augmenter la qualité du DataSet
- Imprimer et assembler la mâchoire statique intégrant le support de caméra : https://github.com/TheRobotStudio/SO-ARM100/blob/main/Optional/Wrist_Cam_Mount_32x32_UVC_Module/README.md
- Imprimer et assembler le support de robot et de caméra Overhead : https://github.com/TheRobotStudio/SO-ARM100/blob/main/Optional/Overhead_Cam_Mount_32x32_UVC_Module/README.md
Calibration des caméras
https://huggingface.co/docs/lerobot/cameras
Google Colab
Pour avoir accès à un GPU avec suffisamment de mémoire (16G recommandé et 64G dans l'idéal) on peut utiliser Google Colab
- Avec Tesla T4 (gratuit 5H / mois) on a 15G de RAM qui permet donc un
batch_size=15 - Avec A100 (12€ les 70 crédits) on a 80G de RAM qui permet donc un
batch_size=64
!cd lerobot && python src/lerobot/scripts/lerobot_train.py \
--dataset.repo_id=gautz/so101_pick_red_18650_drop_black_box_test2_100ep \
--policy.type=act \
--output_dir=outputs/train/so101_pick_red_18650_drop_black_box_test2_100ep_15batch \
--job_name=so101_pick_red_18650_drop_black_box_test2_100ep_15batch \
--policy.device=cuda \
--policy.push_to_hub=False \
--batch_size=15 \
--wandb.enable=trueErreurs :
18 cd /content/
20 cd lerobot/
24 python
25 from huggingface_hub import HfApi
26 hub_api = HfApi()
27 hub_api.create_tag("gautz/so101_pick_red_18650_drop_black_box_test2_100ep", tag="v2.1", repo_type="dataset"
30 cd src/
32 cd lerobot
34 python -m lerobot.datasets.v30.convert_dataset_v21_to_v30 --repo-id=gautz/so101_pick_red_18650_drop_black_box_test2_100epUtilisation de LeRobot avec le bash Linux
- Activer l'environnement conda lerobot
cd ~/lerobotconda activate lerobot
python lerobot/scripts/find_motors_bus_port.py
nano lerobot/common/robot_devices/robots/configs.py
python lerobot/scripts/control_robot.py --robot.type=so101 --robot.cameras='{}' --control.type=teleoperate
Calibration robot et configuration caméras
python -m lerobot.calibrate --teleop.type=so101_leader --teleop.port=/dev/ttyACM0 --teleop.id=leader_arm_fan1
python -m lerobot.calibrate --robot.type=so101_follower --robot.port=/dev/ttyUSB0 --robot.id=follower_arm_fan1
Téléopération
python -m lerobot.teleoperate \
--robot.type=so101_follower \
--robot.port=/dev/ttyUSB0 \
--robot.id=follower_arm_fan1 \
--robot.cameras="{ top: {type: opencv, index_or_path: 2, width: 640, height: 480, fps: 30},follower: {type: opencv, index_or_path: 4, width: 640, height: 480, fps: 30}}" \
--teleop.type=so101_leader \
--teleop.port=/dev/ttyACM0 \
--teleop.id=leader_arm_fan1 \
--display_data=trueRejouer dataset en local :
python -m lerobot.replay \
--robot.type=so101_follower \
--robot.port=/dev/ttyUSB0 \
--robot.id=follower_arm_fan1 \
--dataset.repo_id=gautz/18650-test1-10ep \
--dataset.episode=0 # choose the episode you want to replayMachine Learning
Enregistrer dataset en local :
python -m lerobot.record \
--robot.type=so101_follower \
--robot.port=/dev/ttyUSB0 \
--robot.id=follower_arm_fan1 \
--robot.cameras="{ top: {type: opencv, index_or_path: 2, width: 640, height: 480, fps: 30},follower: {type: opencv, index_or_path: 4, width: 640, height: 480, fps: 30}}" \
--teleop.type=so101_leader \
--teleop.port=/dev/ttyACM0 \
--teleop.id=leader_arm_fan1 \
--display_data=true \
--dataset.repo_id=gautz/18650-test1-10ep \
--dataset.episode_time_s=10 \
--dataset.reset_time_s=10 \
--dataset.num_episodes=10 \
--dataset.single_task="Pick red 18650 battery place black box" \
--dataset.push_to_hub=FalseEntrainer en local avec le CPU
python lerobot/scripts/train.py \
--dataset.repo_id=gautz/18650-test1-10ep \
--policy.type=act \
--output_dir=outputs/train/act_so101_18650-test1-10ep \
--job_name=act_so101_18650-test1-10ep \
--policy.device=cpu # \
--wandb.enable=false # trueEntrainer en local avec le GPU NVidia
python lerobot/scripts/train.py \
--dataset.repo_id=gautz/18650-test1-10ep \
--policy.type=act \
--output_dir=outputs/train/act_so101_18650-test1-10ep \
--job_name=act_so101_18650-test1-10ep \
--policy.device=cuda \
--wandb.enable=falseEnregistrer un dataset d'évaluation d'un modèle à un checkpoint donné :
python -m lerobot.record \
--robot.type=so101_follower \
--robot.port=/dev/ttyUSB0 \
--robot.cameras="{ top: {type: opencv, index_or_path: 2, width: 800, height: 600, fps: 30},follower: {type: opencv, index_or_path: 4, width: 800, height: 600, fps: 30}}" \
--robot.id=follower_arm_fan1 \
--display_data=false \
--dataset.repo_id=gautz/eval_act_18650-test2-100ep \
--dataset.single_task="Pick red 18650 battery place black box" \
--policy.path=outputs/train/act_so101_18650-test2-100ep/checkpoints/last/pretrained_model \
--dataset.push_to_hub=FalseUtilisation de LeRobot avec Anaconda Powershell Prompt
Calibration des robots
python -m lerobot.setup_motors --robot.type=so101_follower --robot.port=COM13python -m lerobot.setup_motors --robot.type=so101_leader --robot.port=COM14
Machine Learning
Collecte de données :
Uploader les données vers le Hub HuggingFace :
https://huggingface.co/docs/lerobot/en/il_robots#dataset-upload
huggingface-cli.exe upload gautz/so101_pick_red_18650_drop_black_box_test2_100ep ..\.cache\huggingface\lerobot\gautz\18650-test2-100ep\ --repo-type dataset
Entrainer un modèle sur un Dataset (sur IHA-QLIOVR-1, compte admin) :
cd ..\gauthier.hentz\lerobot\
conda activate lerobot
cd .\lerobot\
conda create -y -n lerobot python=3.10
conda activate lerobot
conda install ffmpeg -c conda-forge
ffmpeg -encoders
conda install ffmpeg=7.1.1 -c conda-forge
pip install av poetry-core
pip3 install --pre torch torchvision torchaudio --index-url https://download.pytorch.org/whl/cu128
pip install -e .
python lerobot/scripts/train.py --dataset.repo_id=gautz/18650-test2-100ep --policy.type=act --output_dir=outputs/train/act_so101_18650-test2-100ep --job_name=act_so101_18650-test2-100ep --policy.device=cuda --wandb.enable=false
Enregistrer un dataset d'évaluation d'un modèle à un checkpoint donné :
python -m lerobot.record --robot.type=so101_follower --robot.port=/dev/ttyUSB0 --robot.cameras="{ top: {type: opencv, index_or_path: 2, width: 800, height: 600, fps: 30},follower: {type: opencv, index_or_path: 4, width: 800, height: 600, fps: 30}}" --robot.id=follower_arm_fan1 --display_data=false --dataset.repo_id=gautz/eval_act_18650-test2-100ep --dataset.single_task="Pick red 18650 battery place black box" --policy.path=outputs/train/act_so101_18650-test2-100ep/checkpoints/last/pretrained_model --dataset.push_to_hub=False
Uploader un modèle vers HuggingFace
https://github.com/huggingface/lerobot/?tab=readme-ov-file#add-a-pretrained-policy
- Rechercher le dossier du Checkpoint voulu, par ex.
C:\Users\User\github\lerobot\outputs\train\act_so101_18650-test2-100ep\checkpoints\100000 - Définir le User HuggingFace (qui doit être Login via un Token)
gautzet le Repoact_so101_pick_red_18650_drop_black_box_test2_100ep_100000, puis uploader le Checkpoint :huggingface-cli.exe upload gautz/act_so101_pick_red_18650_drop_black_box_test2_100ep_100000 .\outputs\train\act_so101_18650-test2-100ep\checkpoints\100000
Historique du Terminal complet
wget "https://repo.anaconda.com/miniconda/Miniconda3-latest-Windows-x86_64.exe" -outfile ".\Downloads\Miniconda3-latest-Windows-x86_64.exe"
cd .\github\lerobot\
conda create -y -n lerobot python=3.10
conda activate lerobot
conda install ffmpeg -c conda-forge
conda install ffmpeg=7.1.1 -c conda-forge
wsl --shutdown
pip install -e .
pip install -e ".[feetech]" # or "[dynamixel]" for example
python lerobot/find_port.py
python lerobot/find_cameras.py opencv
python -m lerobot.setup_motors --robot.type=so101_follower --robot.port=COM13`
python -m lerobot.record --robot.type=so101_follower --robot.port=COM13 --robot.cameras="{ top: {type: opencv, index_or_path: 2, width: 800, height: 600, fps: 30},follower: {type: opencv, index_or_path: 4, width: 800, height: 600, fps: 30}}" --robot.id=follower_arm_fan1 --display_data=false --dataset.repo_id=gautz/eval_act_18650-test2-100ep --dataset.single_task="Pick red 18650 battery place black box" --policy.path=outputs/train/act_so101_18650-test2-100ep/checkpoints/last/pretrained_model --dataset.push_to_hub=False
python -m lerobot.calibrate --teleop.type=so101_leader --teleop.port=COM14 --teleop.id=leader_arm_fan1`
python -m lerobot.calibrate --robot.type=so101_follower --robot.port=COM13 --robot.id=follower_arm_fan1
python -m lerobot.teleoperate --robot.type=so101_follower --robot.port=COM13 --robot.id=follower_arm_fan1 --robot.cameras="{ top: {type: opencv, index_or_path: 1, width: 640, height: 480, fps: 30},follower: {type: opencv, index_or_path: 2, width: 640, height: 480, fps: 30}}" --teleop.type=so101_leader --teleop.port=COM14 --teleop.id=leader_arm_fan1 --display_data=true
python lerobot/find_cameras.py opencv
python -m lerobot.teleoperate --robot.type=so101_follower --robot.port=COM13 --robot.id=follower_arm_fan1 --robot.cameras="{ top: {type: opencv, index_or_path: 1, width: 800, height: 600, fps: 30},follower: {type: opencv, index_or_path: 2, width: 800, height: 600, fps: 30}}" --teleop.type=so101_leader --teleop.port=COM14 --teleop.id=leader_arm_fan1 --display_data=true
pip install -e .
python lerobot/find_cameras.py opencv
python -m lerobot.teleoperate --robot.type=so101_follower --robot.port=COM13 --robot.id=follower_arm_fan1 --robot.cameras="{ top: {type: opencv, index_or_path: 1, width: 800, height: 600, fps: 30},follower: {type: opencv, index_or_path: 0, width: 800, height: 600, fps: 30}}" --teleop.type=so101_leader --teleop.port=COM14 --teleop.id=leader_arm_fan1 --display_data=true
python -m lerobot.record --robot.type=so101_follower --robot.port=COM13 --robot.cameras="{ top: {type: opencv, index_or_path: 1, width: 800, height: 600, fps: 30},follower: {type: opencv, index_or_path: 0, width: 800, height: 600, fps: 30}}" --robot.id=follower_arm_fan1 --display_data=false --dataset.repo_id=gautz/eval_act_18650-test2-100ep --dataset.single_task="Pick red 18650 battery place black box" --policy.path=outputs/train/act_so101_18650-test2-100ep/checkpoints/last/pretrained_model --dataset.push_to_hub=False
python lerobot/scripts/display_sys_info.py
python -m torch.utils.collect_env
python -c "import torch; print(torch.cuda.is_available())" && nvcc -V
python -c "import torch; print(torch.cuda.is_available())"
pip3 install --pre torch torchvision torchaudio --index-url https://download.pytorch.org/whl/cu128
python -m lerobot.record --robot.type=so101_follower --robot.port=COM13 --robot.cameras="{ top: {type: opencv, index_or_path: 1, width: 800, height: 600, fps: 30},follower: {type: opencv, index_or_path: 0, width: 800, height: 600, fps: 30}}" --robot.id=follower_arm_fan1 --display_data=false --dataset.repo_id=gautz/eval_act_18650-test2-100ep --dataset.single_task="Pick red 18650 battery place black box" --policy.path=outputs/train/act_so101_18650-test2-100ep/checkpoints/last/pretrained_model --dataset.push_to_hub=False --wandb.enable=false
python -m lerobot.record --robot.type=so101_follower --robot.port=COM13 --robot.cameras="{ top: {type: opencv, index_or_path: 1, width: 800, height: 600, fps: 30},follower: {type: opencv, index_or_path: 0, width: 800, height: 600, fps: 30}}" --robot.id=follower_arm_fan1 --display_data=false --dataset.repo_id=gautz/eval_act_18650-test2-100ep --dataset.single_task="Pick red 18650 battery place black box" --policy.path=outputs/train/act_so101_18650-test2-100ep/checkpoints/last/pretrained_model --dataset.push_to_hub=False --dataset.episode_time_s=10 --dataset.reset_time_s=10 --dataset.num_episodes=10
exit
cd .\github\lerobot\
conda activate lerobot
python -m lerobot.record --robot.type=so101_follower --robot.port=COM13 --robot.cameras="{ top: {type: opencv, index_or_path: 1, width: 800, height: 600, fps: 30},follower: {type: opencv, index_or_path: 0, width: 800, height: 600, fps: 30}}" --robot.id=follower_arm_fan1 --display_data=false --dataset.repo_id=gautz/eval_act_18650-test2-100ep --dataset.single_task="Pick red 18650 battery place black box" --policy.path=outputs/train/act_so101_18650-test2-100ep/checkpoints/last/pretrained_model --dataset.push_to_hub=False --dataset.episode_time_s=15 --dataset.reset_time_s=10 --dataset.num_episodes=10
python -m lerobot.teleoperate --robot.type=so101_follower --robot.port=COM13 --robot.id=follower_arm_fan1 --robot.cameras="{ top: {type: opencv, index_or_path: 1, width: 800, height: 600, fps: 30},follower: {type: opencv, index_or_path: 0, width: 800, height: 600, fps: 30}}" --teleop.type=so101_leader --teleop.port=COM14 --teleop.id=leader_arm_fan1 --display_data=true
exit
cd .\github\lerobot\
conda activate lerobot
python -m lerobot.teleoperate --robot.type=so101_follower --robot.port=COM13 --robot.id=follower_arm_fan1 --robot.cameras="{ top: {type: opencv, index_or_path: 1, width: 800, height: 600, fps: 30},follower: {type: opencv, index_or_path: 0, width: 800, height: 600, fps: 30}}" --teleop.type=so101_leader --teleop.port=COM14 --teleop.id=leader_arm_fan1 --display_data=true
python lerobot/find_port.py
python -m lerobot.teleoperate --robot.type=so101_follower --robot.port=COM15 --robot.id=follower_arm_fan1 --robot.cameras="{ top: {type: opencv, index_or_path: 1, width: 800, height: 600, fps: 30},follower: {type: opencv, index_or_path: 0, width: 800, height: 600, fps: 30}}" --teleop.type=so101_leader --teleop.port=COM14 --teleop.id=leader_arm_fan1 --display_data=true
python lerobot/find_cameras.py opencv
python -m lerobot.teleoperate --robot.type=so101_follower --robot.port=COM15 --robot.id=follower_arm_fan1 --robot.cameras="{ top: {type: opencv, index_or_path: 0, width: 800, height: 600, fps: 30},follower: {type: opencv, index_or_path: 2, width: 800, height: 600, fps: 30}}" --teleop.type=so101_leader --teleop.port=COM14 --teleop.id=leader_arm_fan1 --display_data=true
python -m lerobot.record --robot.type=so101_follower --robot.port=COM15 --robot.cameras="{ top: {type: opencv, index_or_path: 1, width: 800, height: 600, fps: 30},follower: {type: opencv, index_or_path: 0, width: 800, height: 600, fps: 30}}" --robot.id=follower_arm_fan1 --display_data=false --dataset.repo_id=gautz/eval_act_18650-test2-100ep --dataset.single_task="Pick red 18650 battery place black box" --policy.path=outputs/train/act_so101_18650-test2-100ep/checkpoints/last/pretrained_model --dataset.push_to_hub=False --dataset.episode_time_s=15 --dataset.reset_time_s=10 --dataset.num_episodes=10
python -m lerobot.record --robot.type=so101_follower --robot.port=COM15 --robot.cameras="{ top: {type: opencv, index_or_path: 0, width: 800, height: 600, fps: 30},follower: {type: opencv, index_or_path: 2, width: 800, height: 600, fps: 30}}" --robot.id=follower_arm_fan1 --display_data=false --dataset.repo_id=gautz/eval_act_18650-test2-100ep --dataset.single_task="Pick red 18650 battery place black box" --policy.path=outputs/train/act_so101_18650-test2-100ep/checkpoints/last/pretrained_model --dataset.push_to_hub=False --dataset.episode_time_s=15 --dataset.reset_time_s=10 --dataset.num_episodes=10
python -m lerobot.teleoperate --robot.type=so101_follower --robot.port=COM15 --robot.id=follower_arm_fan1 --robot.cameras="{ top: {type: opencv, index_or_path: 0, width: 800, height: 600, fps: 30},follower: {type: opencv, index_or_path: 2, width: 800, height: 600, fps: 30}}" --teleop.type=so101_leader --teleop.port=COM14 --teleop.id=leader_arm_fan1 --display_data=true
cd .\github\lerobot\
cd ..
cd .\.cache\
cd .\huggingface\ls
cd .\huggingface\lerobot\calibration\cd ..
cd .\huggingface\lerobot\
cd .\gautz\
cd ..
cd .\github\lerobot\
cd .\outputs\train\
cd .\act_so101_18650-test2-100ep\
cd .\checkpoints\Migration dataset v2.1 to v3
https://github.com/huggingface/lerobot/blob/main/docs/source/lerobot-dataset-v3.mdx#migrate-v21--v30
Visualiser et rejouer des DataSets (avant hardware refactor)
- Visualiser un DataSet
python lerobot/scripts/visualize_dataset.py --repo-id lerobot/pusht --root ./my_local_data_dir --local-files-only 1 --episode-index 0
python lerobot/scripts/visualize_dataset_html.py \
--repo-id cadene/act_so100_5_lego_test_080000 \
--local-files-only 1- Rejouer un DataSet (ou une évaluation de modèle) sur le robot
python lerobot/scripts/control_robot.py \
--robot.type=so101 \
--control.type=replay \
--control.fps=30 \
--control.repo_id=cadene/act_so100_5_lego_test_080000 \
--control.episode=0- Rejouer la Policy
cadene/act_so100_5_lego_test_080000du modèle ACT pour le SO-ARM101- En sauvegardant l'évaluation dans
outputs/eval/act_so100_5_lego_test_080000_haguenau
- En sauvegardant l'évaluation dans
python lerobot/scripts/control_robot.py \
--robot.type=so101 \
--control.type=record \
--control.fps=30 \
--control.single_task="Grasp a lego block and put it in the bin." \
--control.repo_id=outputs/eval/act_so100_5_lego_test_080000_haguenau \
--control.tags='["tutorial"]' \
--control.warmup_time_s=5 \
--control.episode_time_s=30 \
--control.reset_time_s=30 \
--control.num_episodes=10 \
--control.push_to_hub=false \
--control.policy.path=cadene/act_so100_5_lego_test_080000Sources
https://wiki.seeedstudio.com/lerobot_so100m/
https://huggingface.co/blog/sherryxychen/train-act-on-so-101