
Maintenance et utilisation experte
Maintenance
Changement des piles
- Une fois par an en Juillet
- Démonter le cache métallique (4 vis alènes). Le joint a été mis de côté dans l'armoire bleue pour simplifier le démontage
- Démonter les vis avec un tournevis plat (les clés alènes servent à extraire le boitier de piles)
- Commencer par dévisser la vis du bas et bien plaquer le boitier pour faciliter le vissage/dévissage

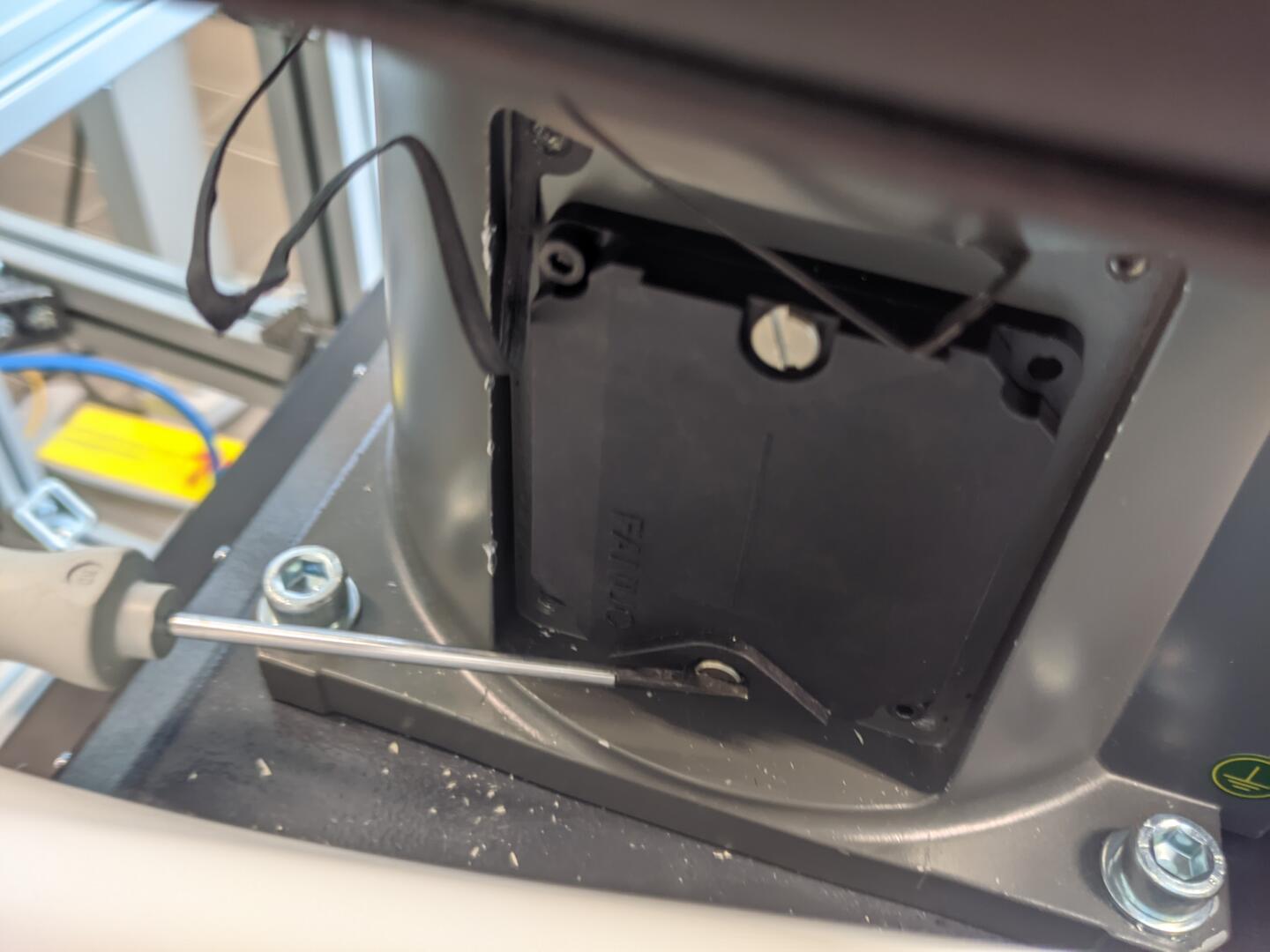
- 4 piles C2 à demander au service technique. Respecter la polarité qui est marquée avec + et -
Calibration des moteurs
Suivre la doc' https://seafile.unistra.fr/f/334ef5b14e02461eb4ba/
Récupérer et brancher le teach pendant si le robot n'en a pas.
- Dans l'armoire électrique sur la droite du robot :
- Mode Auto / Manuel (T1)
- Contrôleur ON/OFF
- Prise Teach Pendant

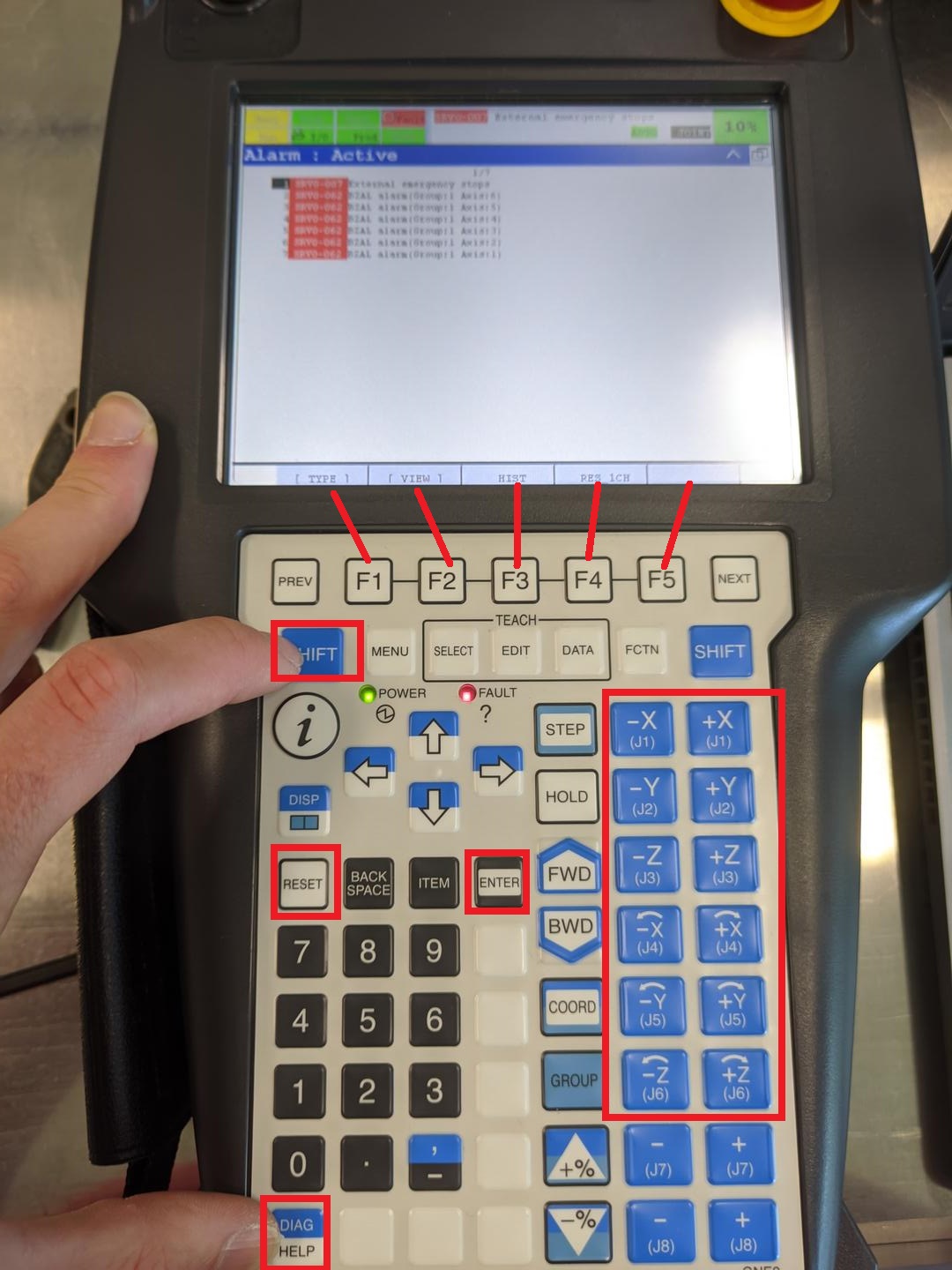
Etape 4 : Teach Panel
- Les boutons F1-F5 permettent de sélectionner les options qui apparaissent en bas de l'écran
- Afficher les Alarmes Actives en cliquant sur
SHIFT+DIAG - Laisser appuyé le bouton homme-mort en position intermédiaire
- Démarrer le contrôleur (panneau Bosch)
- Essayer de désactiver les Alarmes en cliquant sur
RESET - Cliquer sur Reset (teach panel) jusqu'à ce qu'il n'y ait plus d'erreur
- Pour bouger le robot Appuyer sur le bouton homme mort, Appuyer Sur
SHIFT+ boutons bleus des axes
- Etape 3.2 : F3 -> F4/F5
Bien bouger les 6 moteurs sur une grande distance pour que l'alarme SRVO-062 (group 1, axis X) se quitte
Architecture du robot
- Communication Beckhoff TwinCat entre le PC Windows embarqué et le contrôleur du robot
- Teach panel Fanuc dans le coffret électrique