Trame de TP
Voir le Document de formation https://seafile.unistra.fr/f/e71e53654d9b4d039815/ et https://seafile.unistra.fr/f/5fa273ea493144788494/
Présentation du Robot Sherpa B
Le Sherpa est un véhicule sans conducteur, qui assiste l’opérateur à la manutention et à la préparation de
commandes en transportant des charges sur son plateau ou son convoyeur supérieur. Il peut se déplacer de façon
collaborative ou autonome.
Capteurs LIDAR
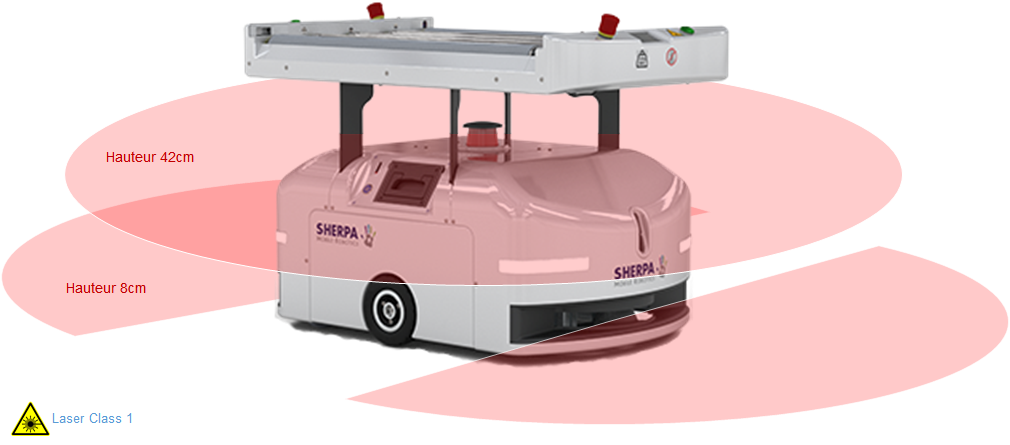
- Le LIDAR (LIght Detection And Ranging) 360° de localisation et navigation se trouve au centre du robot sous le plateau supérieur à ~42cm de hauteur.

Ce LIDAR est un capteur optoélectronique qui scanne le périmètre sur un plan horizontal à l’aide d’un faisceau laser qui tourne à 360°. Il effectue 90 000 mesures à la seconde (rotation 25 tours par seconde) avec une résolution angulaire de 0,1°, avec une portée de 40 m. Plus on s'éloigne plus la résolution angulaire baisse, donc on limite logiciellement à 30m.
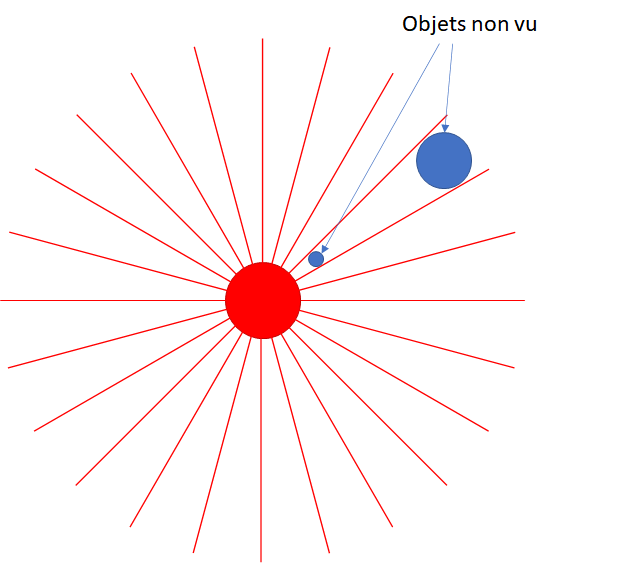
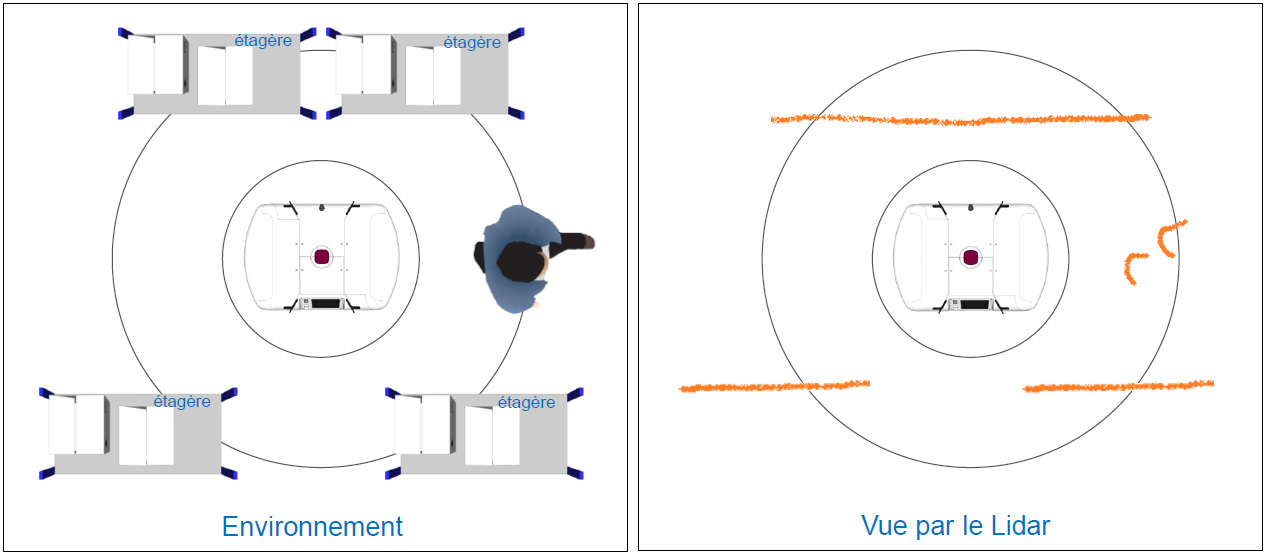
Il mesure la distance de chaque obstacle que le faisceau va rencontrer sur sa trajectoire. Cela permet d’obtenir une cartographie des éléments présents autour du Sherpa® sur ce plan horizontal à une hauteur de 420 mm. Le robot traite ces distances afin de reconstruire une carte 2D des éléments détectés. Les mesures sont alors transformées en un nuage de points représentant les contours visibles des objets environnants
- Les LIDAR 180° de sécurité avant et arrière
Chaque capteur couvre un angle de 180°. Ils couvrent donc le périmètre qui se trouve devant la trajectoire du robot. Ils sont placés au raz du sol (environ 7 cm) de façon à scanner tout ce qui pourrait entrer en collision avec le robot et que le LIDAR 360° ne verrait pas car se trouvant en dessous de son faisceau.
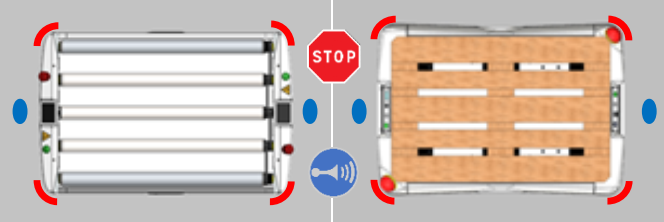
Pupitre d'opération
Situés à l’avant et l’arrière pour les Sherpa B classiques et seulement à l’avant pour les Sherpa B à convoyeur frontal. Ces pupitres sont composés d’un bouton d’arrêt d’urgence, d’une interface tactile et d’un bouton vert.

Enclencher le bouton d’arrêt d’urgence arrête totalement le mouvement du robot. Cependant, le robot ne s’éteint pas pour autant et déverrouiller l’arrêt d’urgence signifie pour le robot, qu’on valide la reprise de ses opérations. Ainsi, si une mission était en cours, le robot reprend sa mission. On note qu’il existe une option pour attendre une validation via le bouton vert suite à un arrêt d’urgence enclenché puis déclenché. L’utilisation de l’interface tactile et du bouton vert seront décrites plus tard dans ce document.
Localisation
La localisation est l’algorithme qui permet au robot de connaître sa position en temps réel. Il est basé sur les positions précédentes du robot et doit donc être initialisé. Cet algorithme est indépendant des autres et tourne en permanence (pendant le mode autonome mais aussi pendant le mode suiveur). Il utilise seulement les données du capteur LIDAR central. La localisation fonctionne avec une carte créée avec le logiciel MapFabric. Par ailleurs, on note qu’il faut que la carte comporte seulement des éléments fixes.
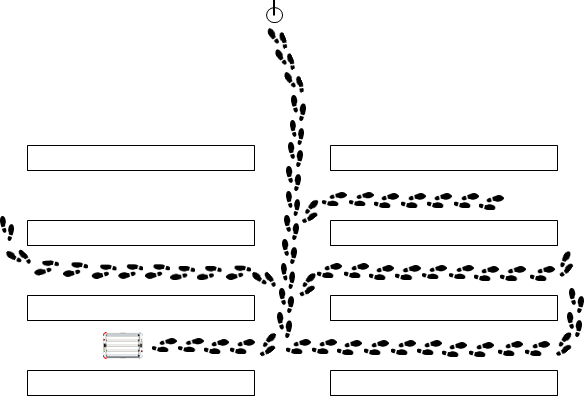
Guidage global
Le guidage global est l’algorithme qui permet au robot, lors d’une mission, de calculer une trajectoire entre sa position courante et la destination souhaitée. Cet algorithme ne tient pas compte des obstacles qui ne sont pas dans sa carte. Il tient compte en revanche des zones de circulation et des zones interdites. Le programme cherche toujours la trajectoire la plus rapide afin de rejoindre sa destination.
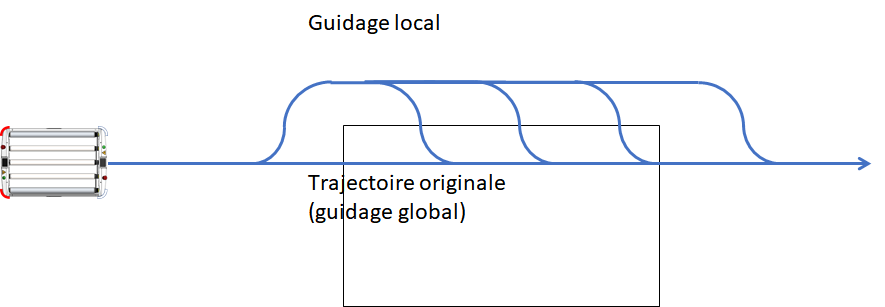
Guidage local
Le guidage local est le programme qui permet au robot de suivre la trajectoire définie par le guidage global. Il prend en compte les obstacles rencontrés qui ne sont pas dans la carte. Si le robot doit contourner un obstacle sur sa trajectoire d’origine, le robot cherchera à rejoindre sa trajectoire initiale au plus vite.
Vitesse du robot
Le robot sélectionne automatiquement sa vitesse afin de suivre au mieux sa trajectoire. Il est toutefois possible de limiter la vitesse maximum du robot en mode automatique de plusieurs manières :
- Dans les paramètres :
- Sherpa B : Cette vitesse est réglée par défaut à 1.5m/s pour un robot 100kg et 1.1m/s
pour un robot 200kg - Sherpa P : Cette vitesse est réglée par défaut à 1.1m/s pour un robot 1000kg et 1.4m/s
pour un robot 500kg.
- Sherpa B : Cette vitesse est réglée par défaut à 1.5m/s pour un robot 100kg et 1.1m/s
- Dans une zone (RoadEditor)
- Dans la mission (MissionEditor)
A un instant donné, si une ou plusieurs valeurs de vitesse maximale sont différentes, le robot choisira alors la plus basse des trois
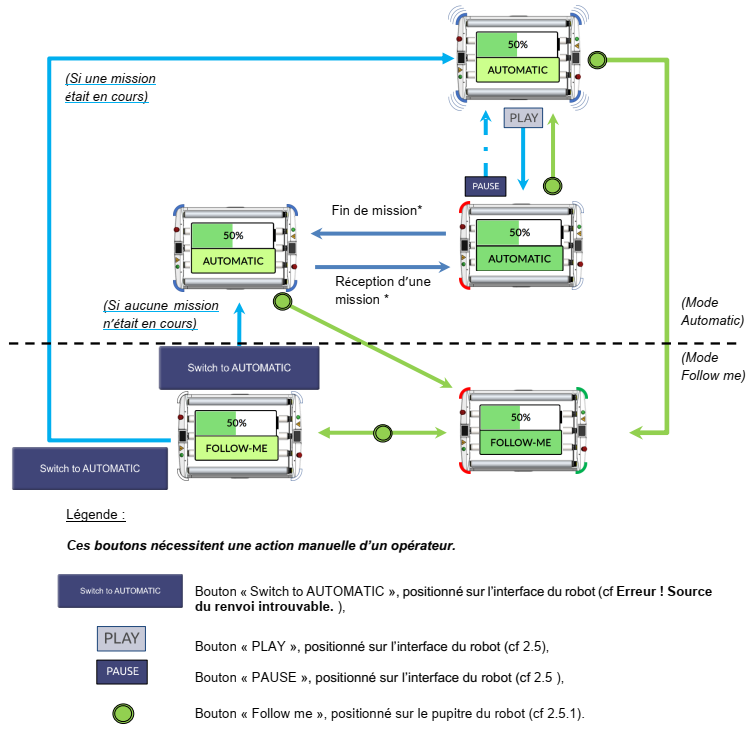
Modes de fonctionnement
| Signalétique | Situation | Interface |
|
|
Sherpa en cours d’initialisation | 4 phares rouges et blue spots allumés 5 tons à la fin de l’initialisation |