Assemblage et câblage de la poubelle à couvercle automatique
1. Assemblage du capteur ultrasonà :ultrasons
Objectif :
AssemblageRéaliser l’assemblage complet de la poubelle à couvercle automatiqueautomatique.
Objectif
Réaliser ensemble.l’assemblage complet de la poubelle à couvercle automatique.
Assemblage :
Le modèle 3D de la poubelle à imprimer en 3D ce trouve en pièce jointe du wiki
PositionnerVous devez positionner le capteur ultrasonà ultrasons de cettela manière suivante :


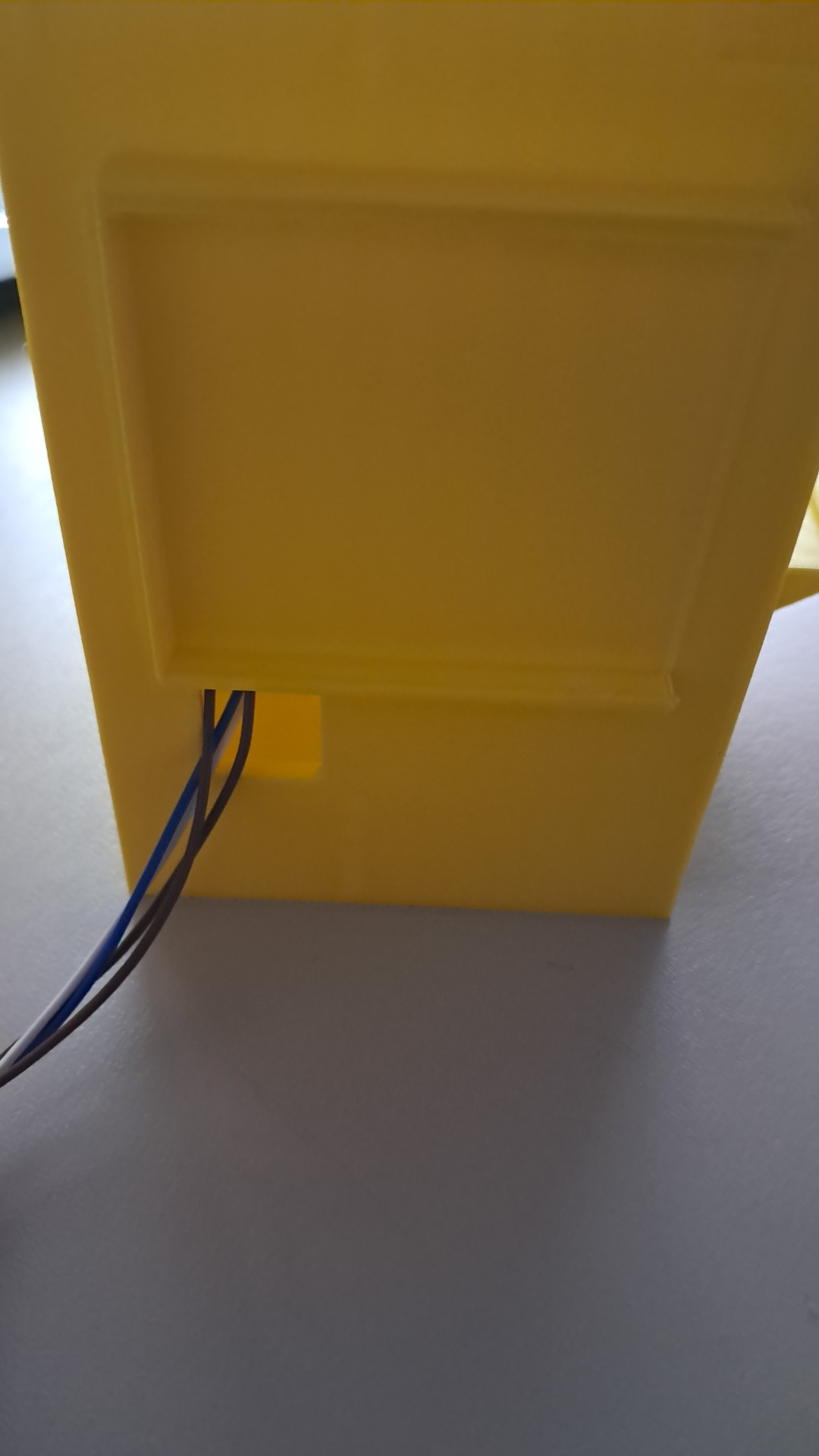
PuisEnsuite, vous devez faire passer les fils par le petit trou situé en bas aà droite dedu l'ultrasoncapteur à ultrasons, comme indiqué ci-dessous :
Une fois le capteur ultrasonà enultrasons placecorrectement oninstallé, peuxvous pouvez passer aà l’installation de la carte Arduino.
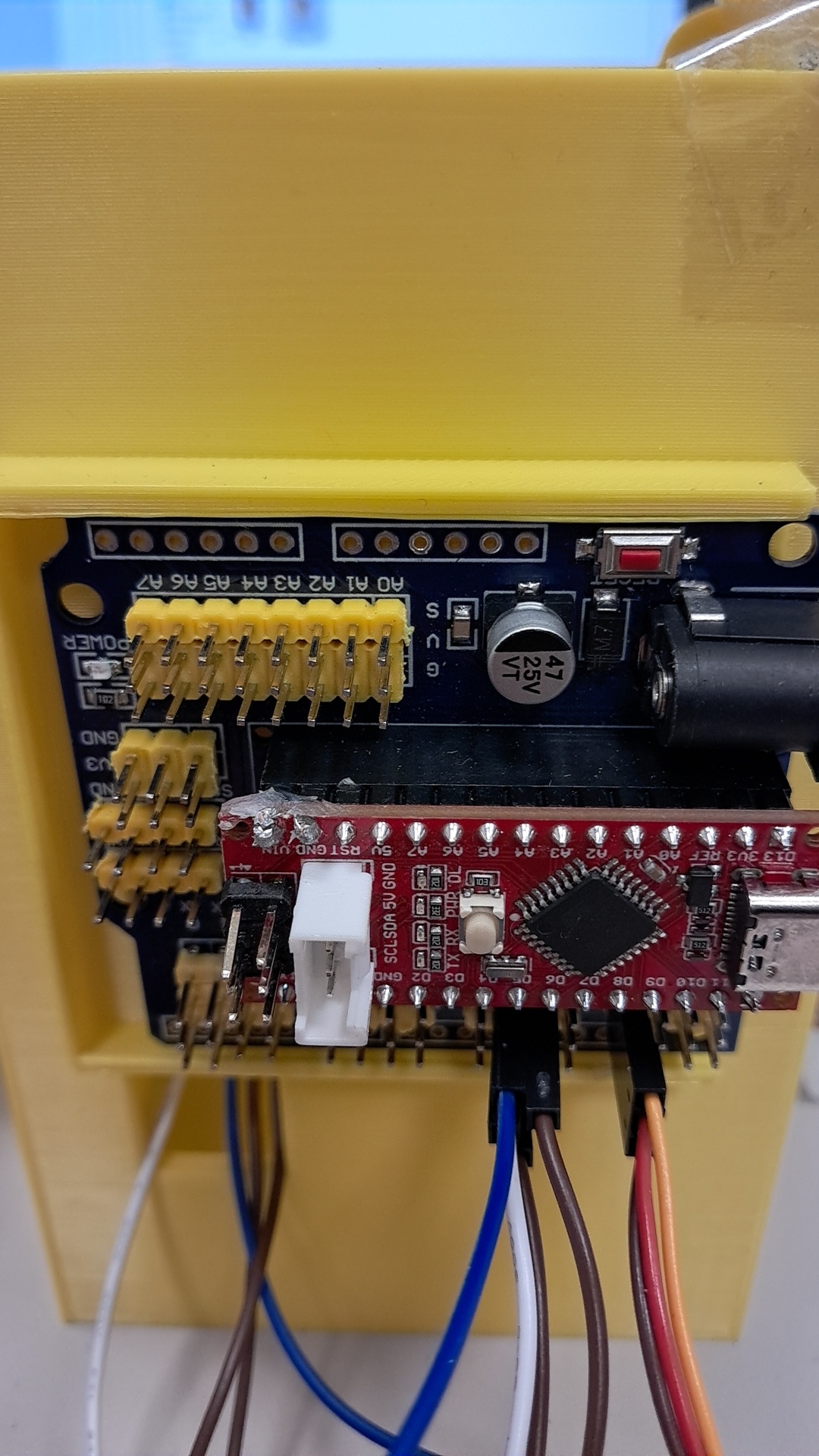
GlissezVous devez glisser votre Arduino nanoNano, accompagné de son shield, dans cette l’encoche représentéprévue cià cet effet, comme montré ci-dessous :
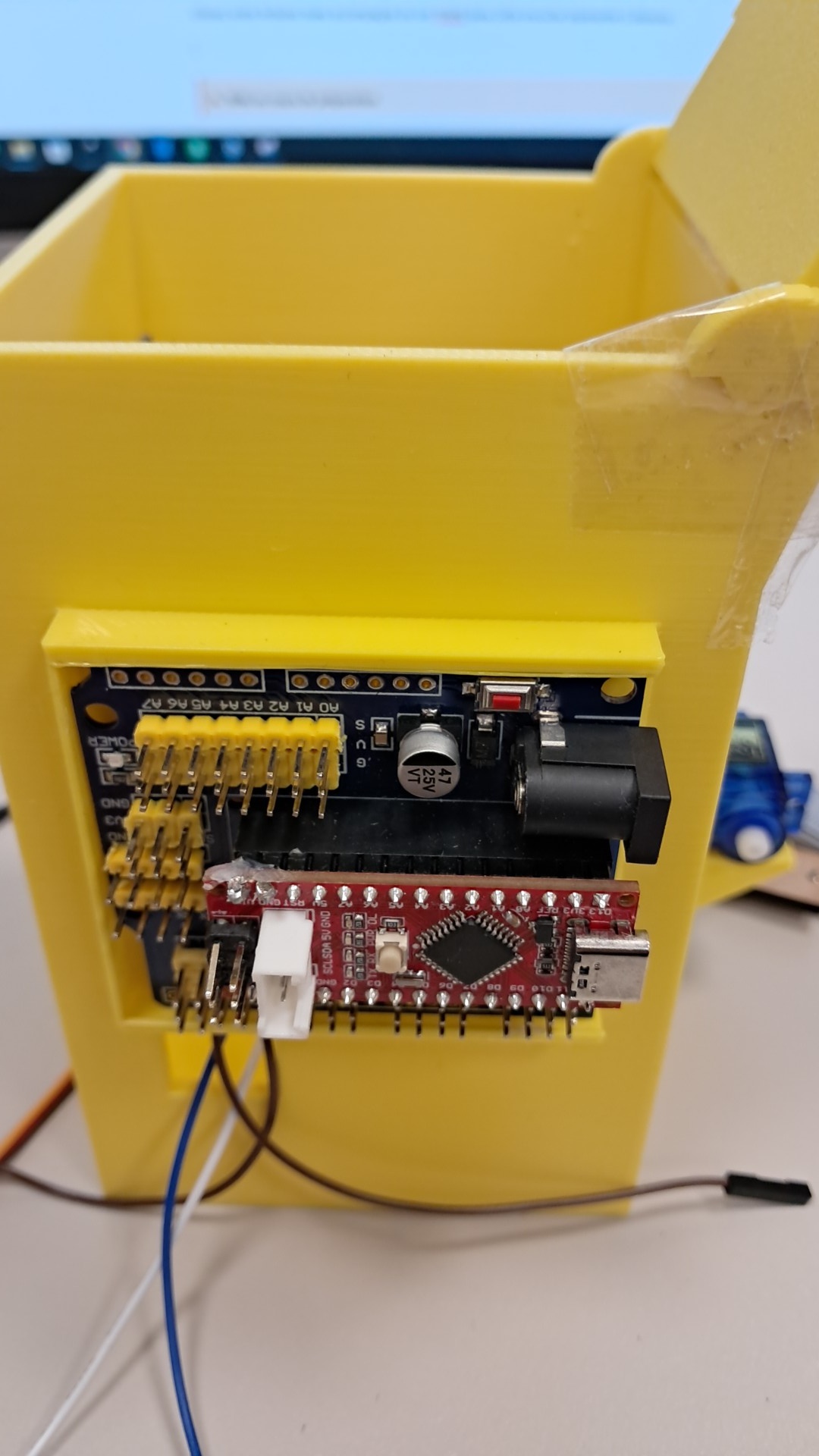

Une fois votrela Cartecarte installée dans son soclesupport, vous pouvez clipser votrele couvercle sur votrela boiteboîte, comme montréillustré ci ci-dessous :

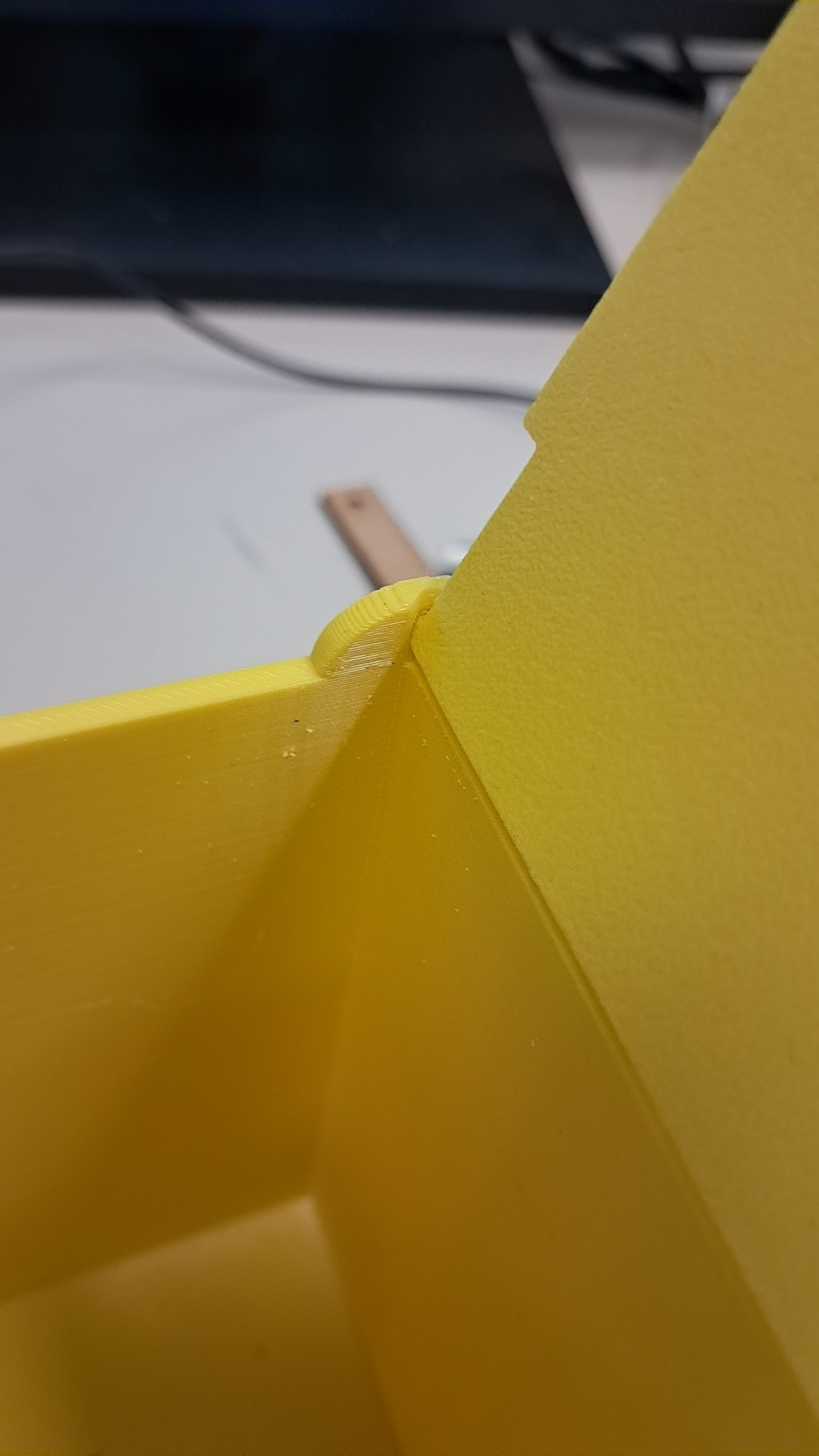
Une fois touteLorsque cette partie technique faite.est nousterminée, pouvonsvous pouvez passer aà l'l’assemblage de ladu languettemécanisme en bois.
Pour cecicette ilétape, nousvous faudraaurez besoin de :
-
1
VisvisM3x12M3 × 12 -
1
Ecrouécrou M3 -
1
Visvis de servomoteur TourneVis1 tournevis
Dans le plus grand trou de la languettelanguette, incévous devez insérer la vis M3x12M3 × 12, puis l'incél’insérer également dans la languette du couvercle égalementcouvercle, comme ceciindiqué ci-dessous :
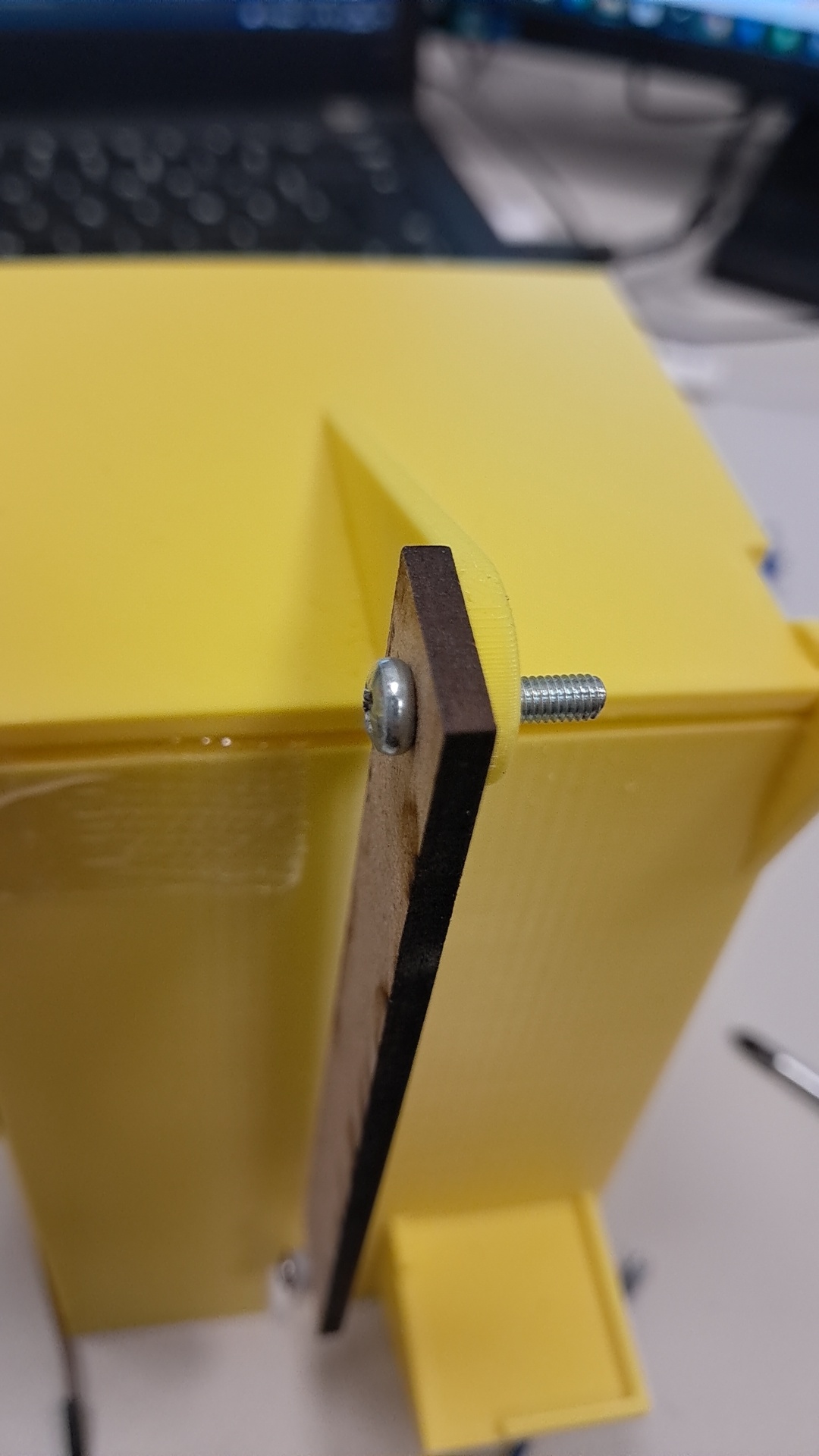
PuisVous ydevez rajouterensuite l'ajouter l’écrou M3, comme cimontré ci-dessous :

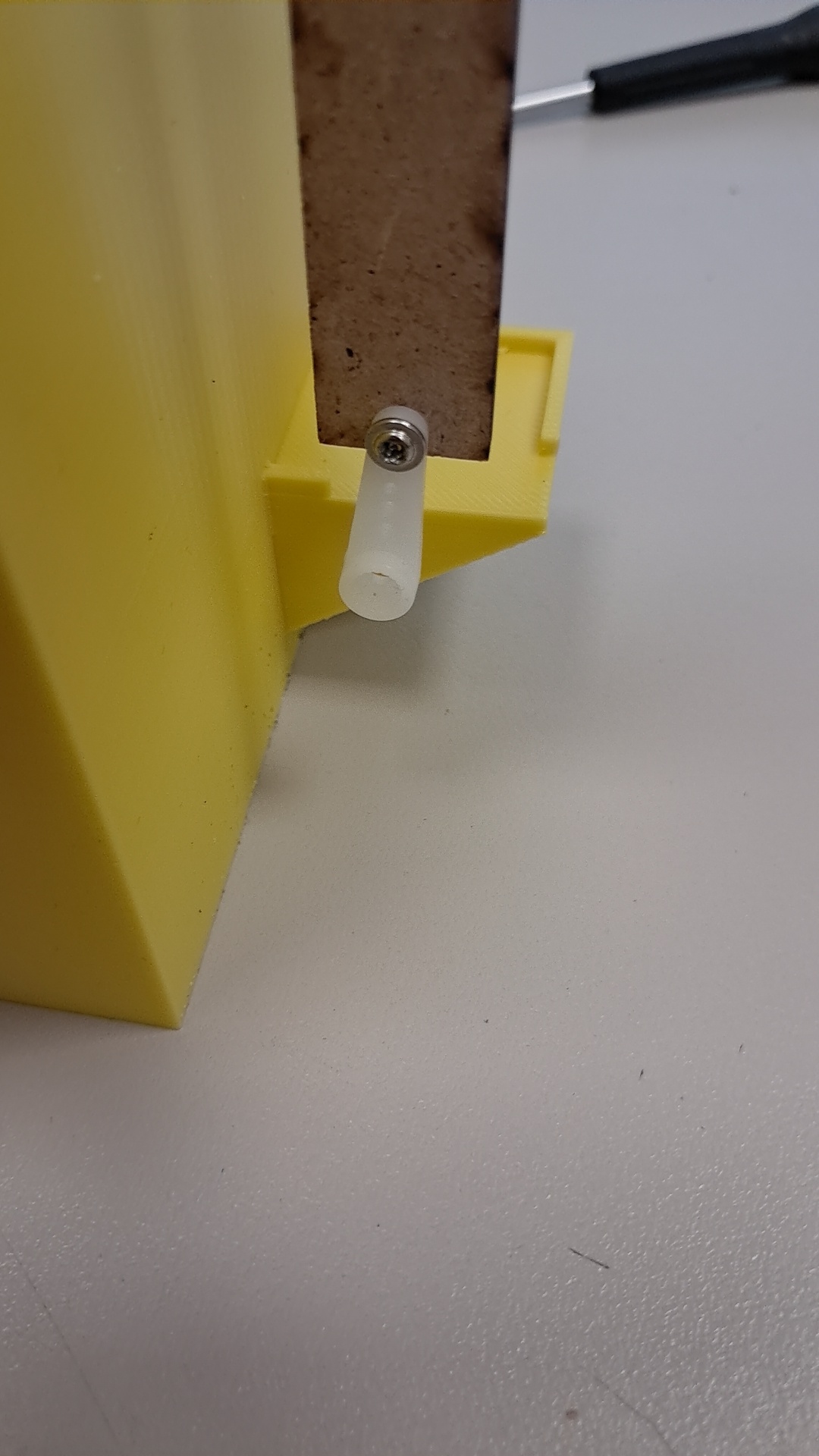
Une fois le cotécôté couvercle faitterminé, il nousne reste plus quequ’à réaliser le cotémontage côté servomoteur.
pourPour cecicela, ilvous nousdevez faudra doncutiliser une vis de servomoteur et tout simplement y visserfixer un palaispalonnier avec un axe seulementuniquement, comme sur l'l’image suivante :
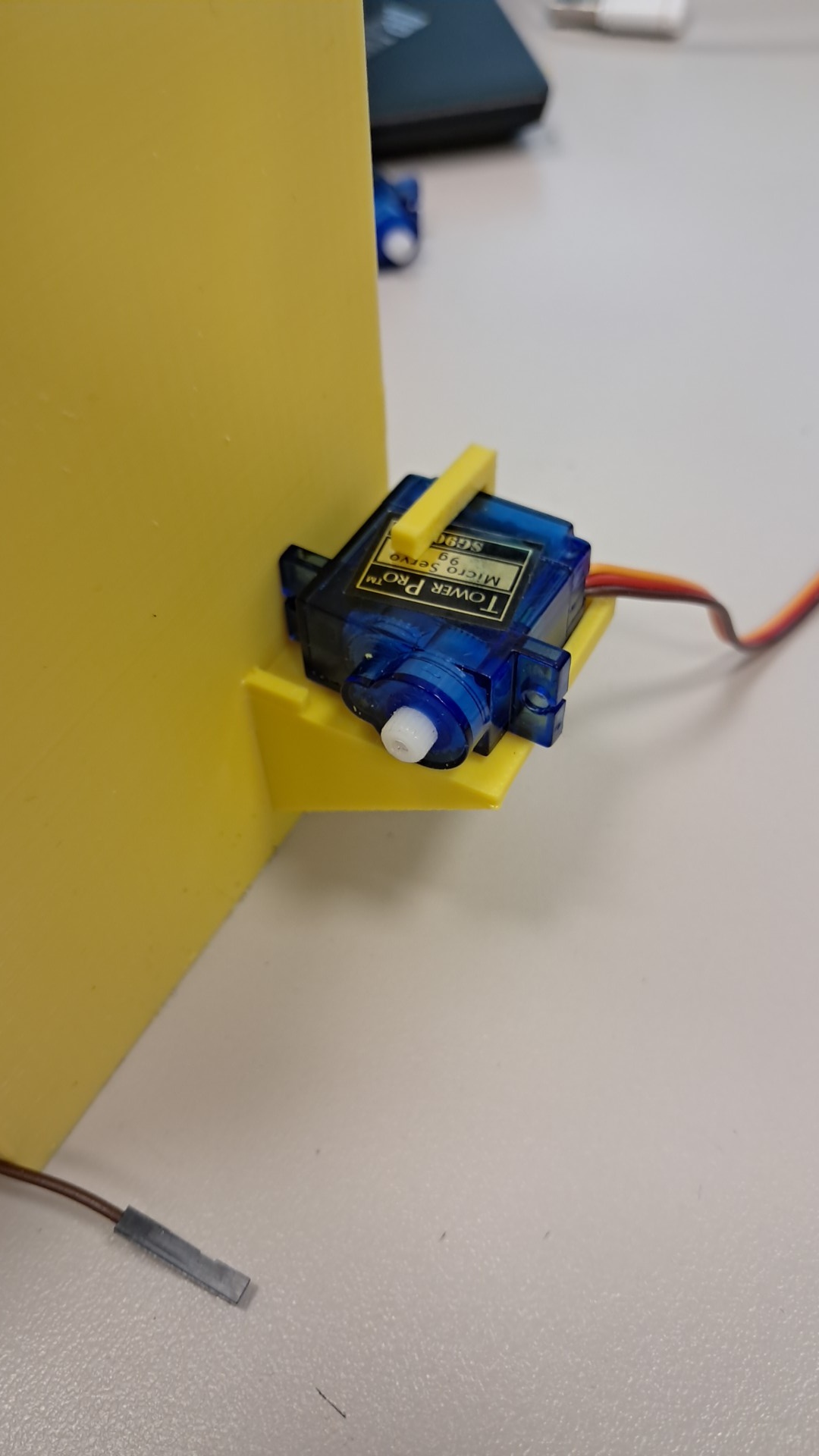
EnsuiteVous ildevez nousmaintenant reste plus qu'a rajouterajouter le servo moteur.servomoteur.
Pour cacela, positionnerpositionnez simplement le servo moteurservomoteur sur son siegesiège, comme ciillustré ci-dessous :
EtPuis, pourajoutez finirla ypièce rajouteren forme de U afin de le U qui le maintientmaintenir en placeplace, comme cecimontré ci-dessous :
Une fois touttous les composants en placeplace, il ne reste plus qu'aqu’à clipperclipser le palaispalonnier asur sonle servomoteurservomoteur, comme ciindiqué ci-dessous :
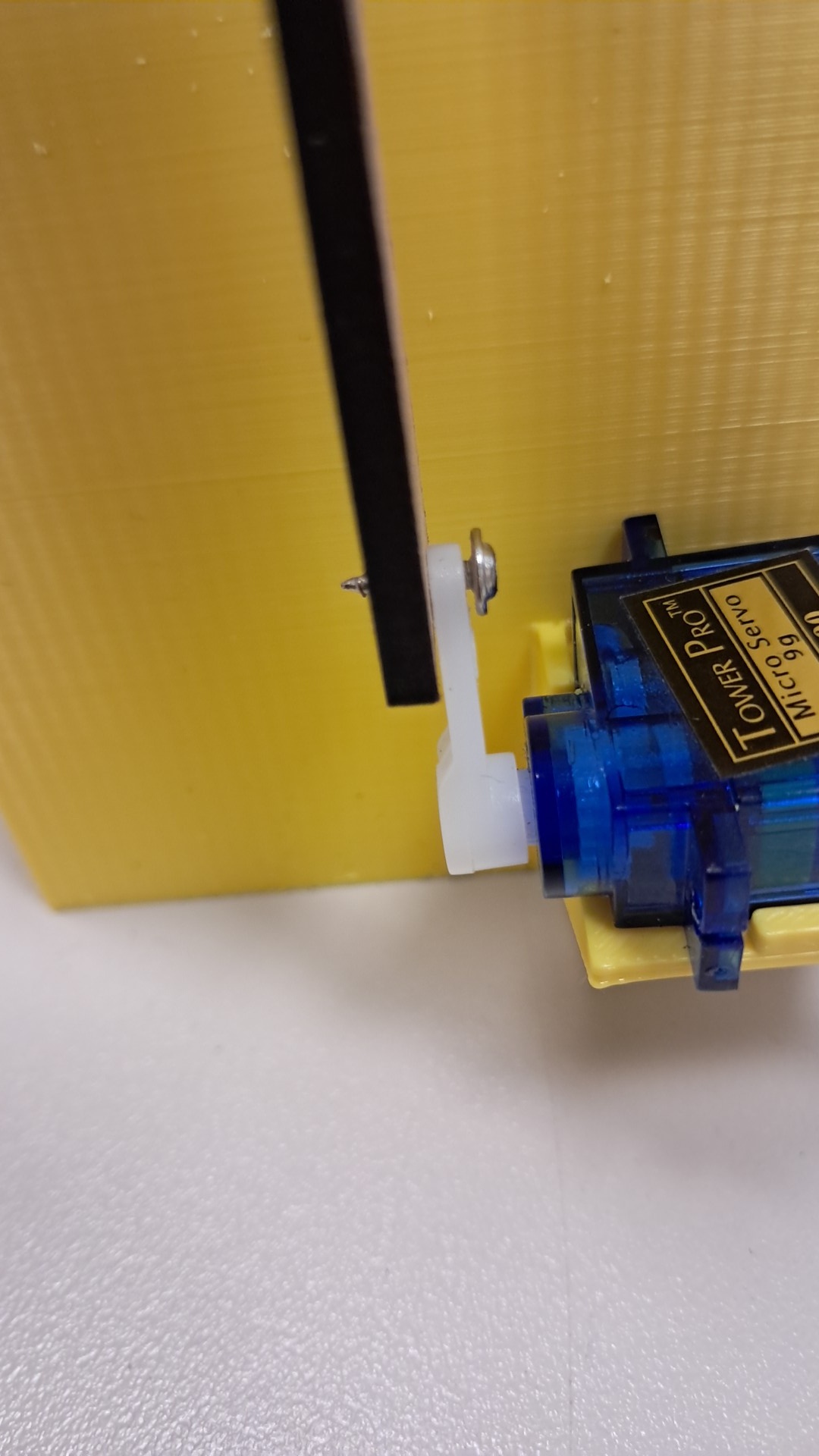
Voila l'L’assemblage est enfinmaintenant fini !terminé.
Câblage :
Maintenant pourAfin que les composants puissent communiquer entre euxeux, ilsvous fautdevez quemaintenant nous les câblions.
Pourréaliser le câblageblage.
Voici les pinsbroches queutilisées nous allons utiliser :
Capteur à ultrasons (HC-SR04)
:-
VCC
→ 5V de l’Arduino -
GND
→ GND de l’Arduino -
TRIG
→ D9 de l’Arduino -
ECHO
→ D10 de l’Arduino
-
-
Servomoteur:- VCC (fil rouge) → 5V de l’Arduino
-
GND
(fil noir) → GND de l’Arduino -
Signal
(fil jaune) → D12 de l’Arduino
Servomoteur
Le
Cefinal qui devraisdoit ressembler aà cecil’exemple : ci-dessous
( Nene vous fiez pas aux couleurs de mesdes fils :3utilisées )sur l’image).