
Assemblage et câblage de la poubelle à couvercle automatique
Objectif de la séance :
Réaliser l’assemblage complet de la poubelle à couvercle automatique.
1. Assemblage du capteur à ultrasons
Le modèle 3D de la poubelle à imprimer en 3D ce trouve en pièce jointe du wiki
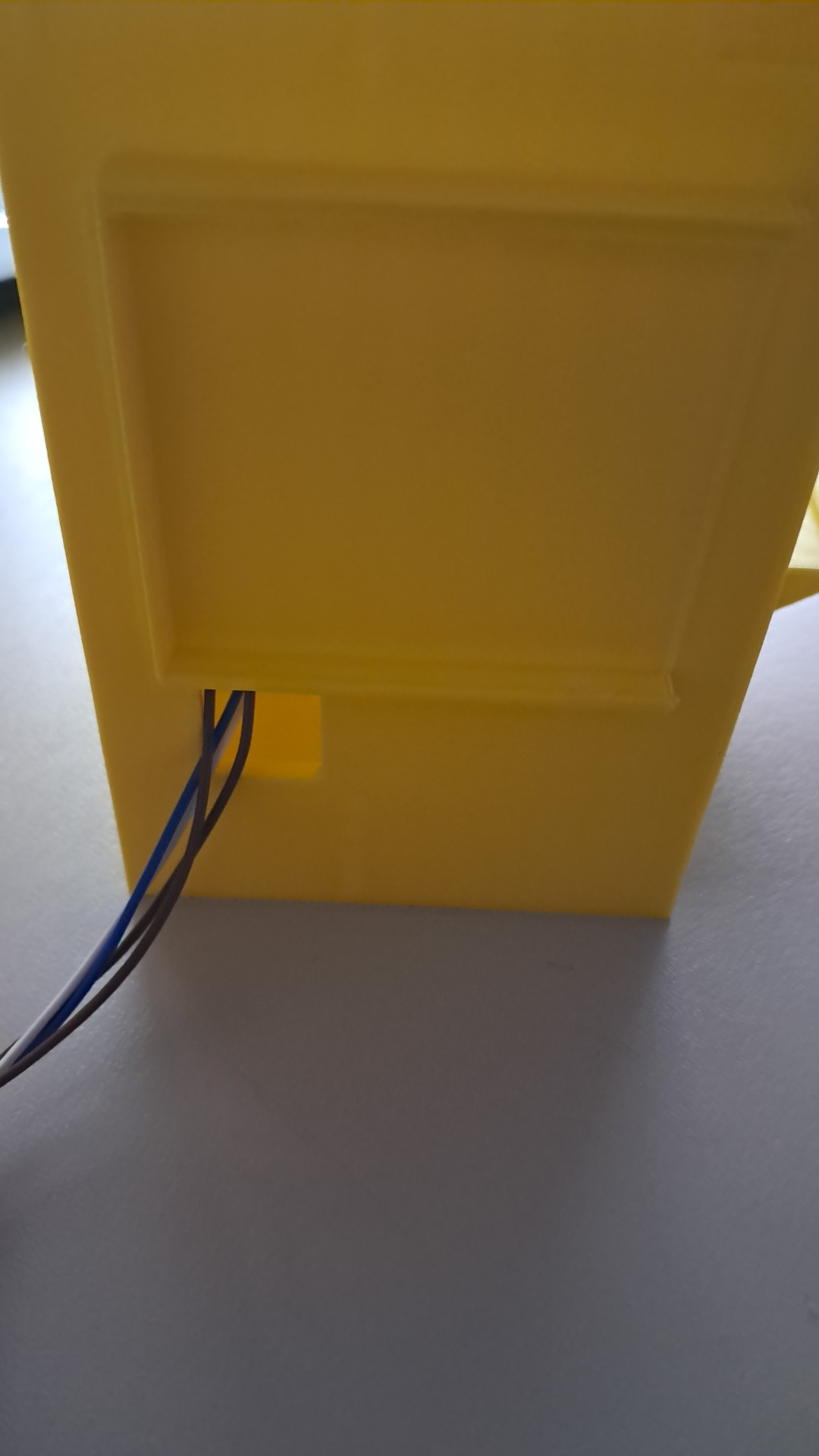
Vous devez positionner le capteur à ultrasons de la manière suivante :


Ensuite, vous devez faire passer les fils par le petit trou situé en bas à droite du capteur à ultrasons, comme indiqué ci-dessous :
Une fois le capteur à ultrasons correctement installé, vous pouvez passer à l’installation de la carte Arduino.
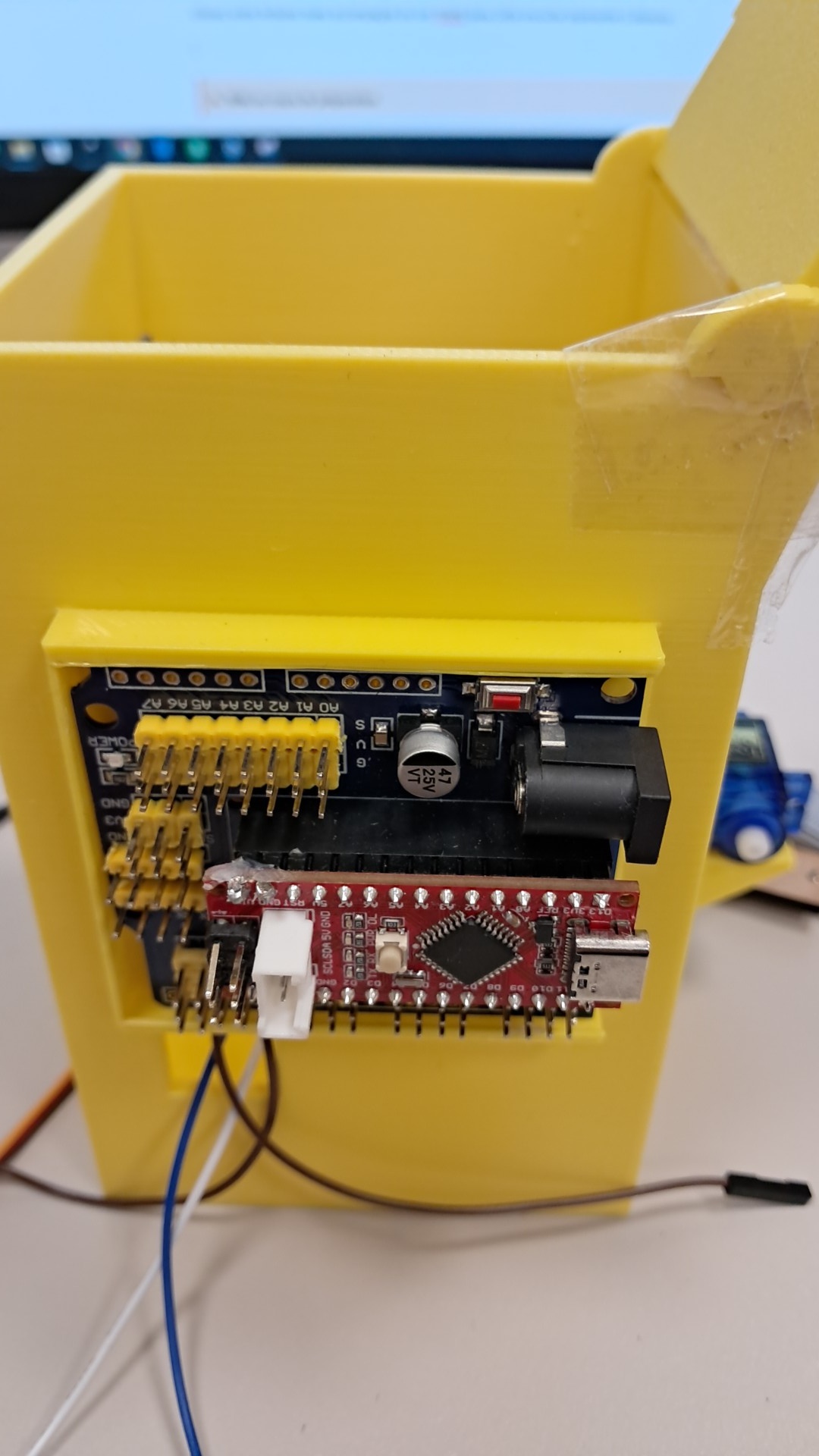
Vous devez glisser votre Arduino Nano, accompagné de son shield, dans l’encoche prévue à cet effet, comme montré ci-dessous :

Une fois la carte installée dans son support, vous pouvez clipser le couvercle sur la boîte, comme illustré ci-dessous :

Lorsque cette partie technique est terminée, vous pouvez passer à l’assemblage du mécanisme en bois.
Pour cette étape, vous aurez besoin de :
-
1 vis M3 12
-
1 écrou M3
-
1 vis de servomoteur
-
1 tournevis
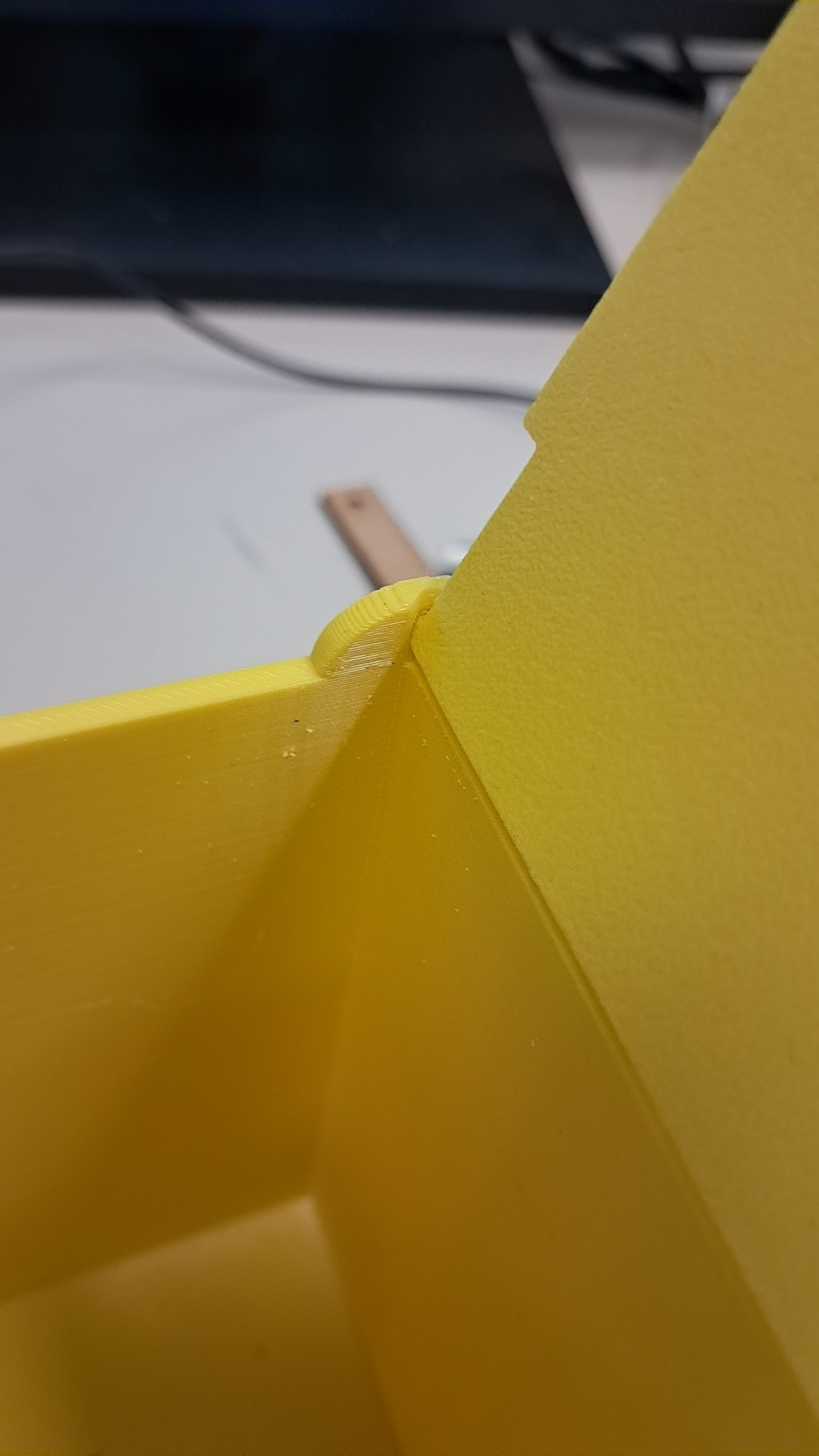
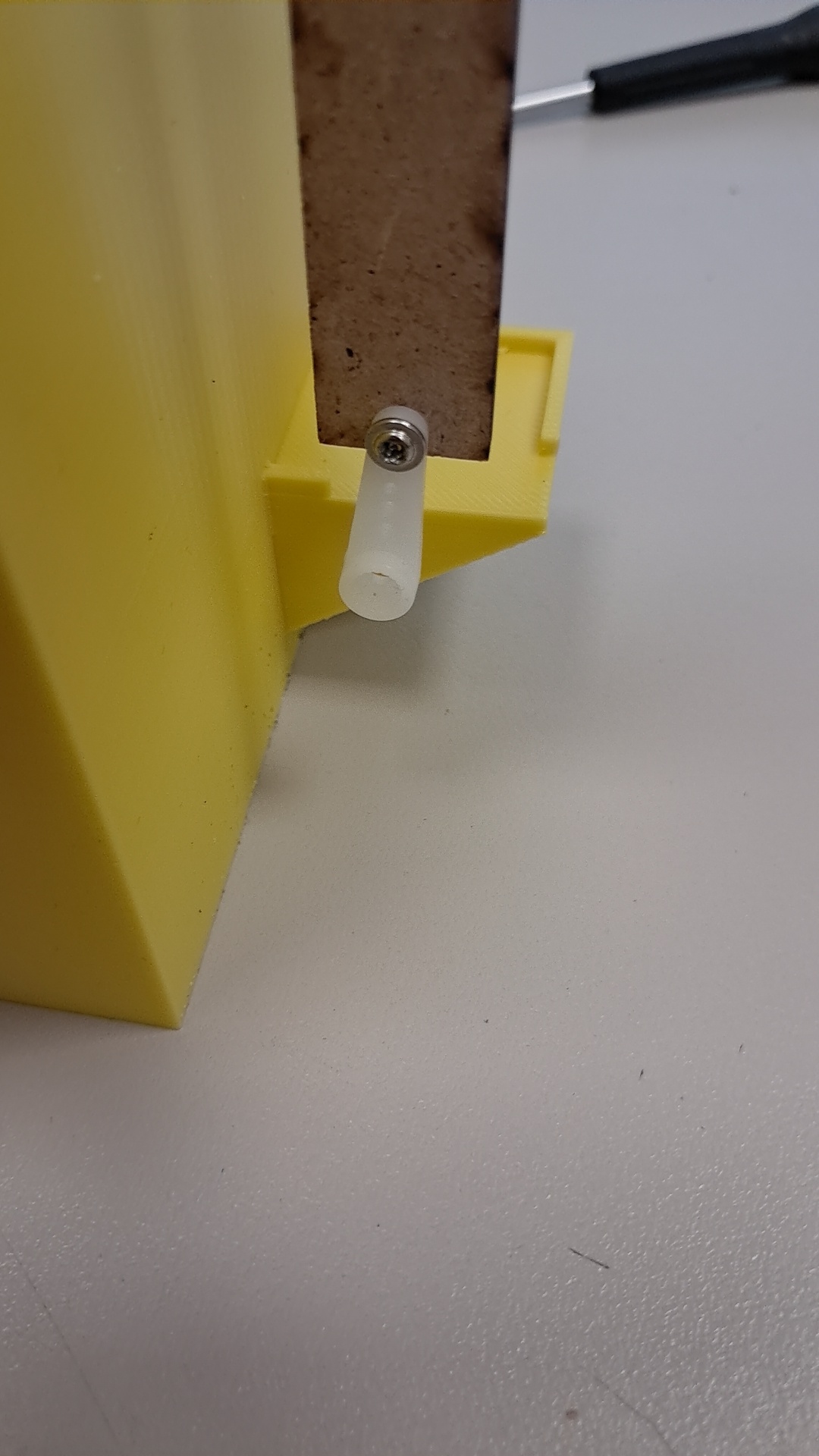
Dans le plus grand trou de la languette en bois, vous devez insérer la vis M3 12, puis l’insérer également dans la languette du couvercle, comme indiqué ci-dessous :
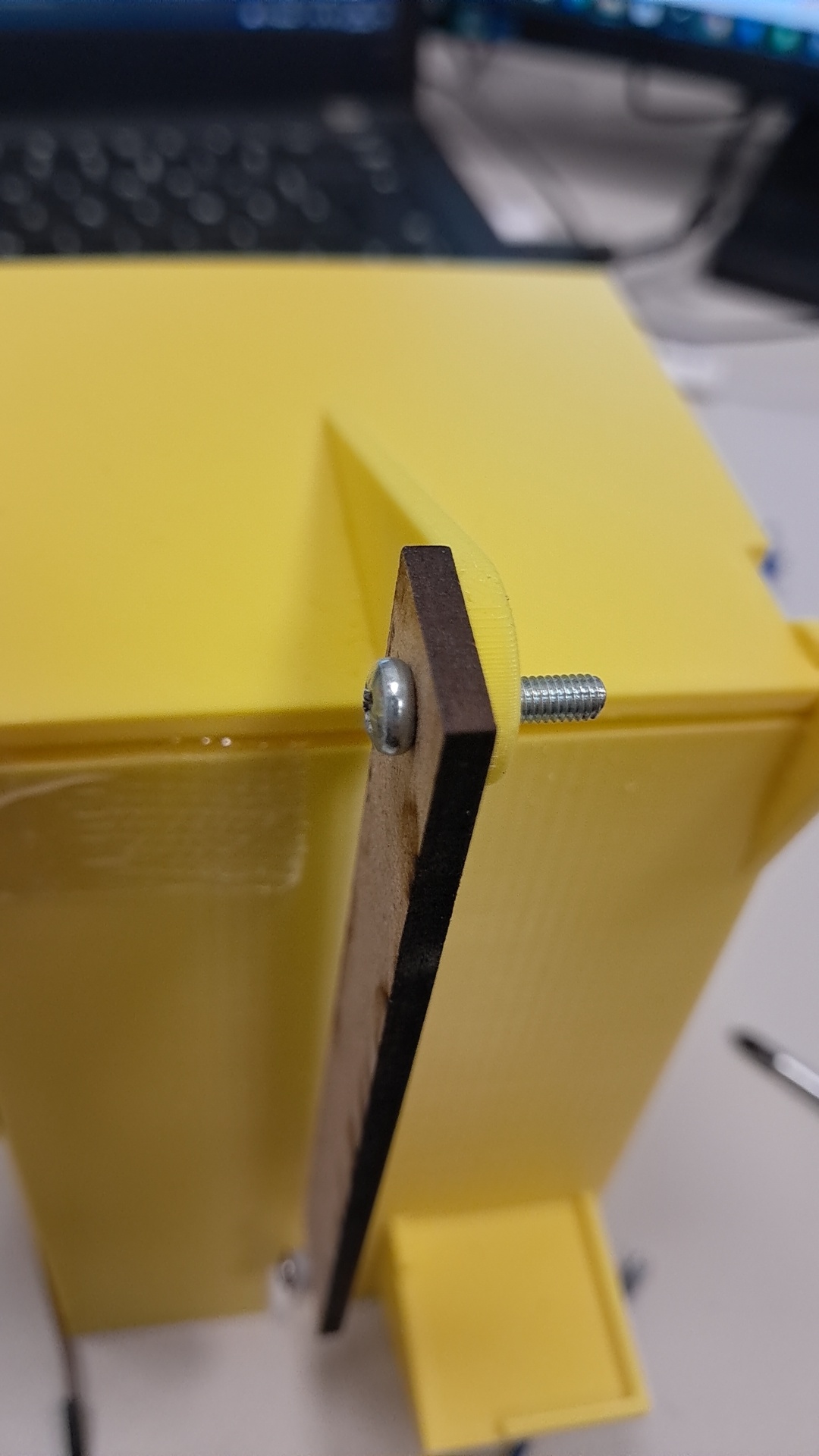
Vous devez ensuite ajouter l’écrou M3, comme montré ci-dessous :

Une fois le côté couvercle terminé, il ne reste plus qu’à réaliser le montage côté servomoteur.
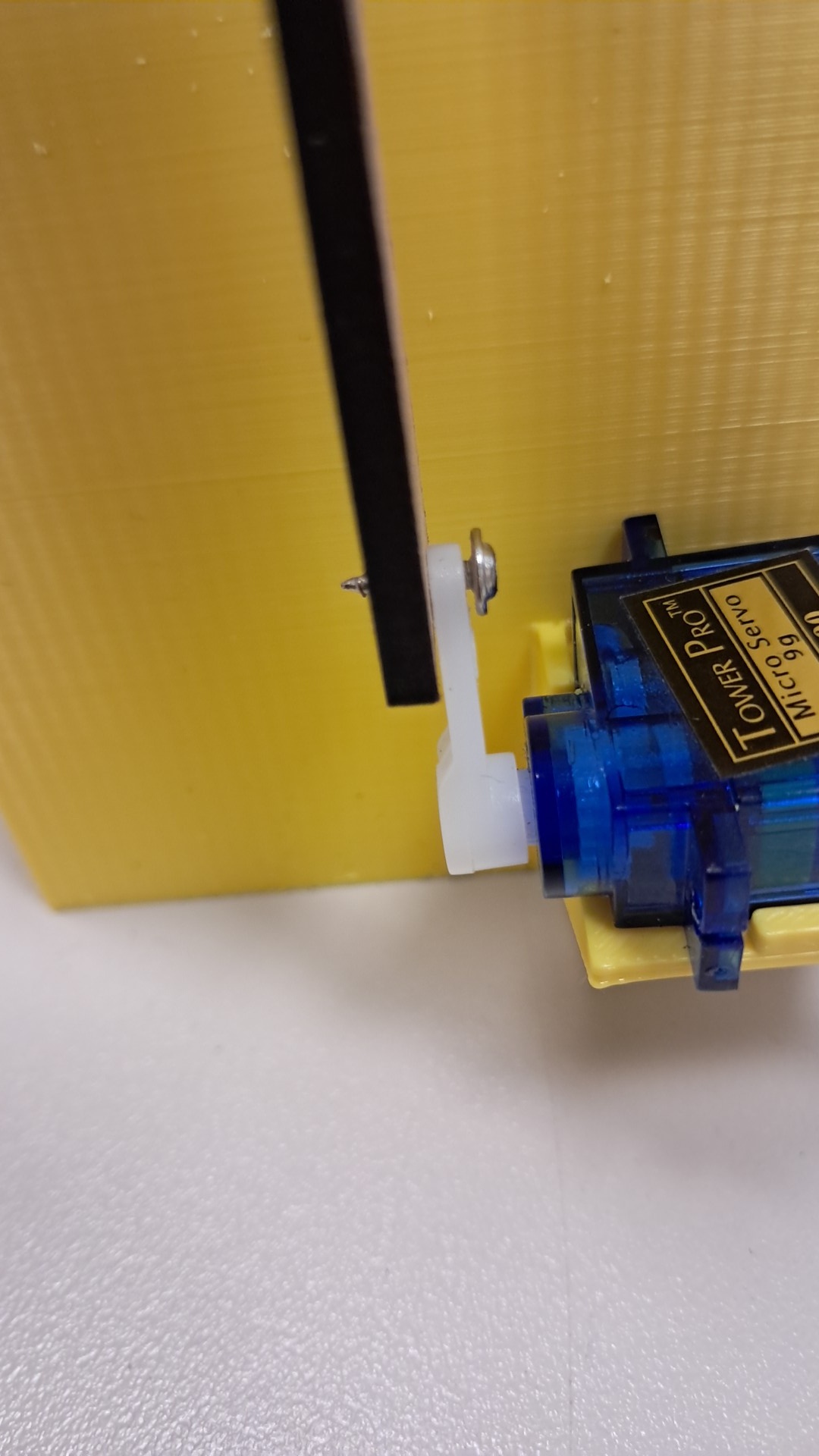
Pour cela, vous devez utiliser une vis de servomoteur et y fixer un palonnier avec un axe uniquement, comme sur l’image suivante :
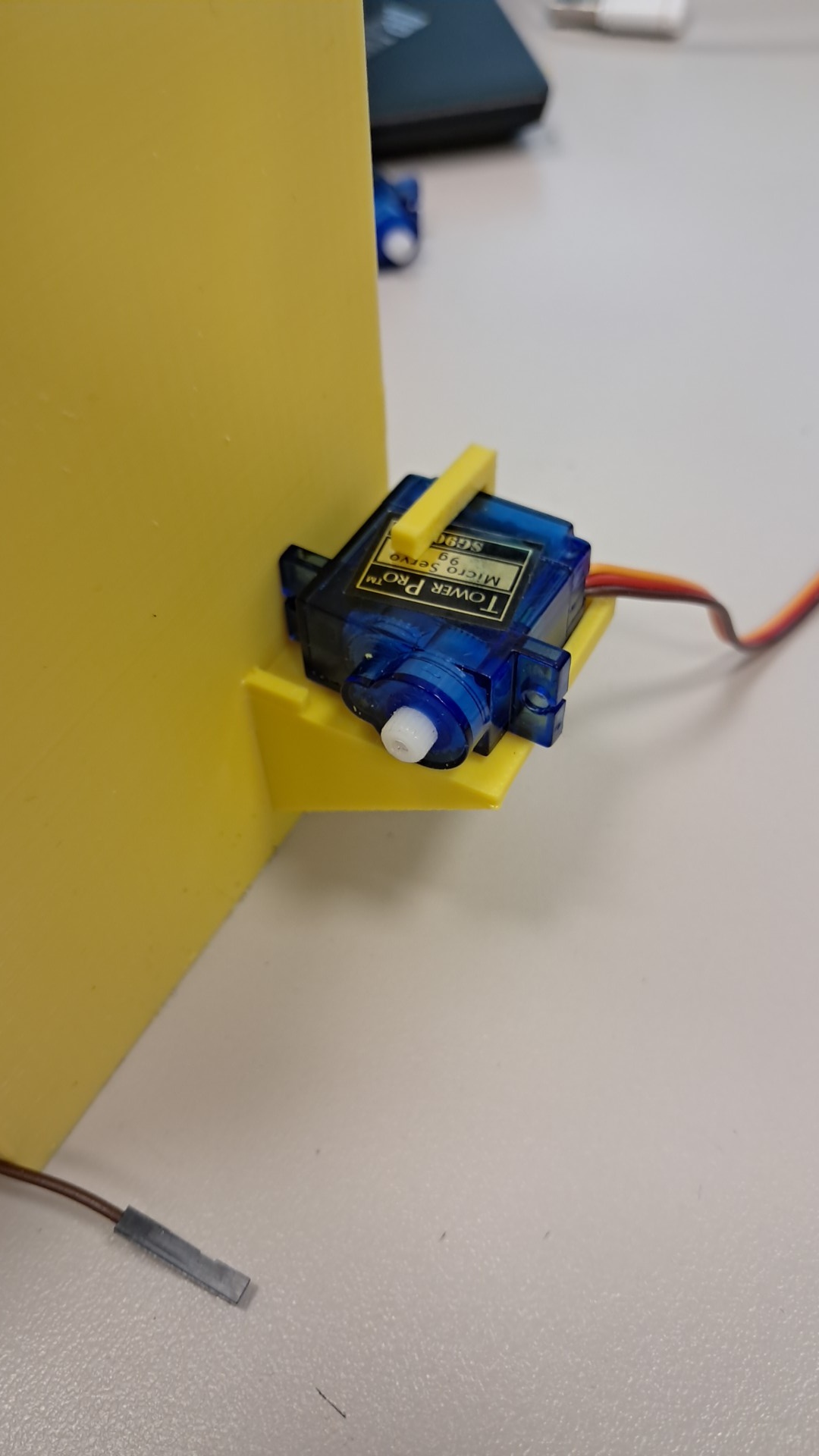
Vous devez maintenant ajouter le servomoteur, Mais avant de le positionner il faut l'initialiser. Pour cela mettez un palonnier sur le servomoteur et tournez le dans le sens inverse des aiguilles d'une montre sans forcer. Une fois arivé au bout votre servomoteur sera donc a 0°. Une fois fait positionnez simplement le servomoteur sur son siège.
Puis, ajoutez la pièce en forme de U afin de le maintenir en place, comme montré ci-dessous :
Une fois tous les composants en place, il ne reste plus qu’à clipser le palonnier sur le servomoteur, comme indiqué ci-dessous :
L’assemblage est maintenant terminé.
Câblage
Afin que les composants puissent communiquer entre eux, vous devez maintenant réaliser le câblage.
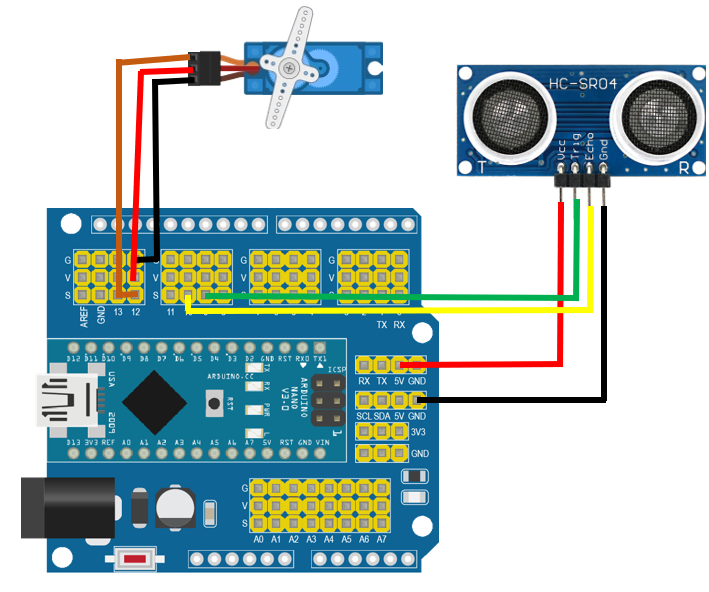
Voici les broches utilisées :
Capteur à ultrasons (HC-SR04)
-
VCC → 5V de l’Arduino
-
GND → GND de l’Arduino
-
TRIG → D9 de l’Arduino
-
ECHO → D10 de l’Arduino
Servomoteur
-
VCC (fil rouge) → 5V de l’Arduino
-
GND (fil noir) → GND de l’Arduino
-
Signal (fil jaune) → D12 de l’Arduino
Le montage final doit ressembler à l’exemple ci-dessous
No Comments