
Description du projet
Introduction
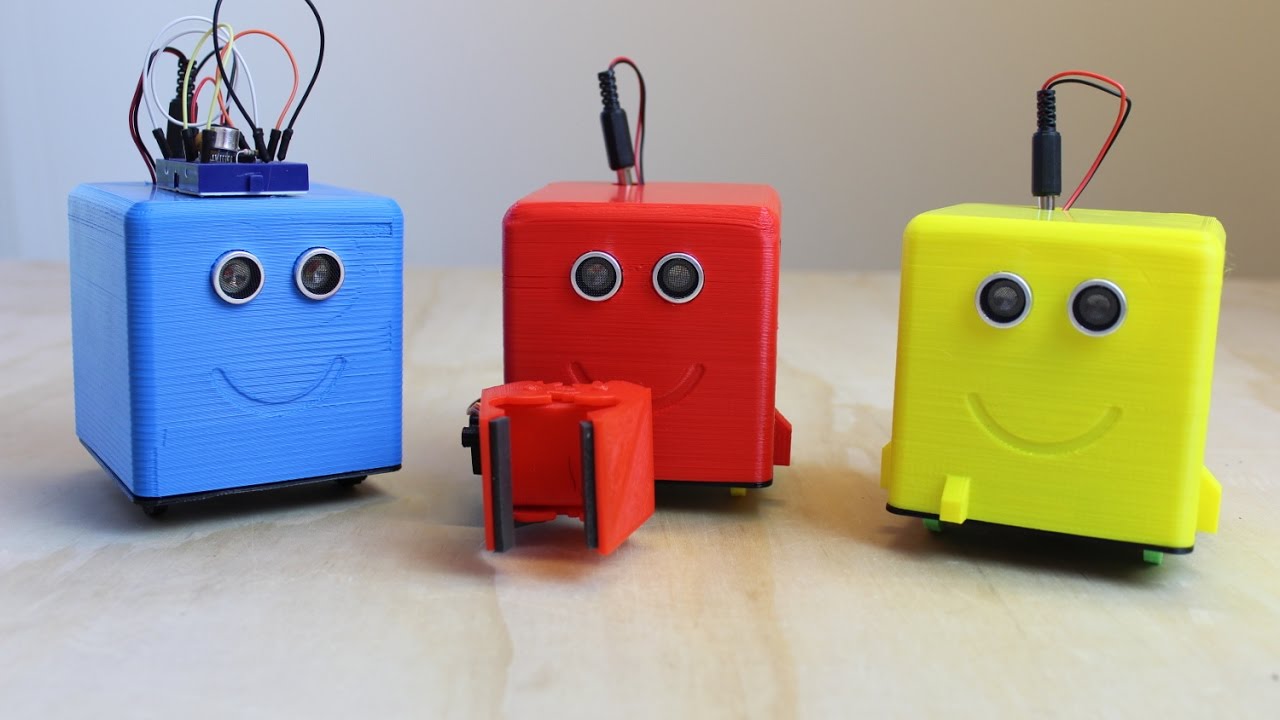
Pour ce cycle, nous allons créer un robot mobile très simple appelé LittleBot.
Description des compétences visées :
Compétences techniques et mécaniques
-
Conception : adapter et améliorer le modèle 3D du robot
-
Assemblage de composants : apprendre à manipuler et assembler les différentes parties (châssis, moteur, composants électroniques, etc.)
-
Choix des matériaux : identifier les matériaux adaptés au projet
Compétences en électronique
-
Découverte et câblage de capteurs : utiliser un capteur
de mouvementultrasons pour détecter une présence. -
Contrôle de moteurs : apprendre à utiliser des moteurs pour le déplacement du robot.
-
Schémas électriques : savoir réaliser un schéma de câblage et connecter les composants sur une carte Arduino.
Compétences en programmation
-
Programmation d'un microcontrôleur Arduino : écrire un code qui gère les capteurs, les délais, et l'action du moteur.
-
Logique conditionnelle : comprendre comment programmer des conditions simples.
-
Optimisation du fonctionnement : ajuster les temps de réponse, durée de déplacement, détection d'obstacle etc.
Compétences transversales
-
-
Gestion de projet : planifier les étapes de réalisation, répartir les tâches, respecter les délais.
-
Résolution de problèmes : savoir réagir face aux imprévus techniques ou fonctionnels.
-
Travail en équipe : collaborer efficacement si le projet est collectif.
-
Description du déroulé des séances:
~9 séances :
- Introduction du projet (brainstorming)
- ~3 séances sur TinkerCAD et sur l'impression 3D (modification de certaines pièces du Little Bot)
- ~1 séance sur l'actionneur : servomoteur RC 360°(déplacement)
- ~1 séance sur le capteur : ultrason (distance)
- ~1 séance sur le couplage capteur moteur
- ~1 séance sur l'assemblage du LittleBot
- ~2 séances sur la programmation du LittleBot
Matériel
Projet inspiré de : https://www.thingiverse.com/thing:2417739
- 1 x Arduino Nano ou compatible (seeeduino, funduino,...) : ~10€
- 1 x câble USB C : ~1€
- 1 x Sensor Shield pour Arduino Nano : ~3€
- 2 x servomoteur à rotation 360° (DM-S0090D-R 9g/0.08s/1.6kg.cm) : ~2€
- 1 x Module ultrason (HC-SR04) : ~2€
- 2 x élastique pour les roues
- 1 x porte pile 4xaa : ~2€
- Une imprimante 3D pour imprimer les pièces du robot (fichier disponible à la prochaine page)(~5€ de filament) :