
Description du projet
Introduction
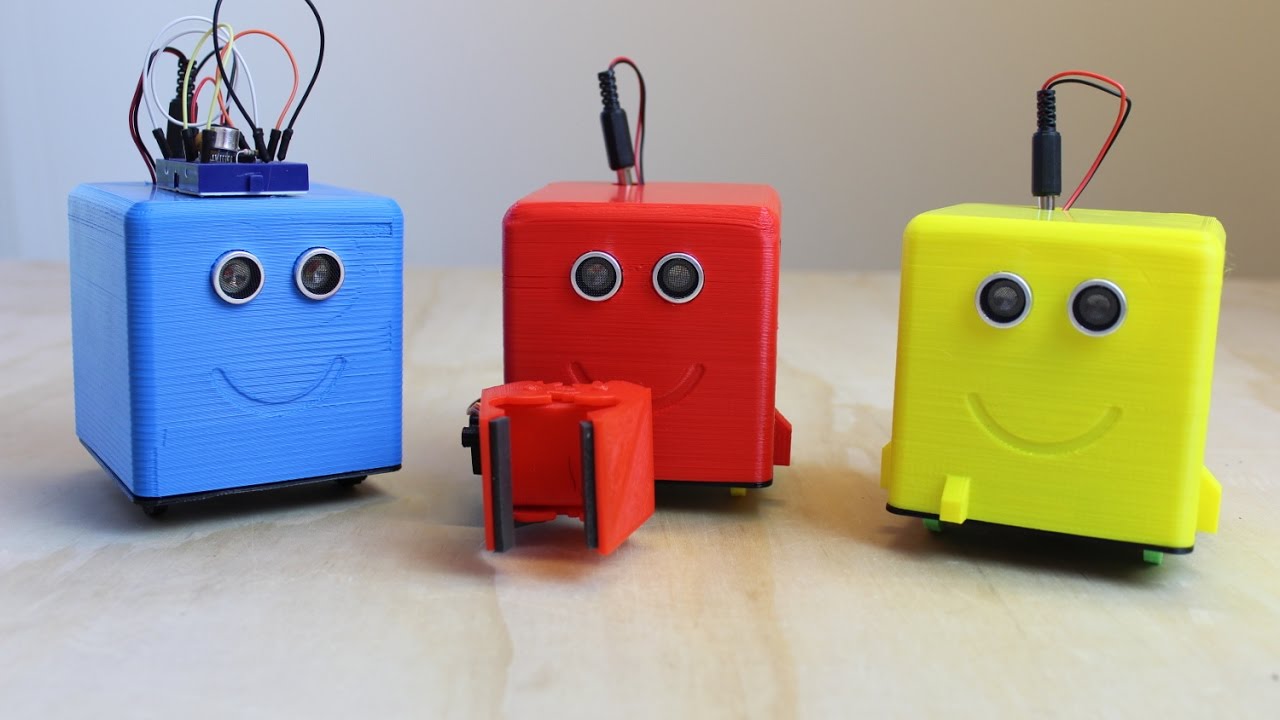
Le premier cycle, sera un robot appelé LittleBot.
Pour ce robot, nous utiliserons un codage en MBlock ainsi que l'utilisation du logiciel Fusion360.
Durant ce cycle, nous apprendrons à utiliser une imprimante 3D mais aussi des composants pour de l'électronique.
Nous découvrirons les principes et le fonctionnement du capteur ultrason ainsi que des servomoteurs.
Le programme, le câblage et l'assemblage vous sera donné pour la réalisation de ce projet.
L'objectif final de ce cycle est de faire avancer le robot, le faire tourner et de lui faire éviter des objets.
Description du cycle
- Compétences Animateur
- Prérequis participants
- Age 10-15
Description du déroulé
11 séances :
- 4 séances Conception électronique et câblage : Arduino et MBlock
- Introduction Arduino et MBlock
- Actionneur : servomoteur (déplacement)
- Capteur : ultrason (distance)
- Couplage capteur moteur
- 4 séances Conception mécanique et assemblage : TinkerCAD et impression 3D
- 2 séances sur TinkerCAD
- 2 séances sur l'impression 3D
- 3 séances d'assemblage et de programmation : Arduino IDE
- Assemblage du LittleBot
- Programmation de la cinématique du véhicule
- Algorithmie pour stratégie d'évitement d'obstacle
Matériel
Projet inspiré de : http://www.brokking.net/yabr_main.html
- 1 x Arduino pro mini clone
- 1 x FTDI USB to TTL programmer for the Arduino pro mini
- 1 x Arduino Uno clone
- 1 x MPU-6050 gyro and accelerometer
- 2 x 2.4G wireless serial transceiver module Open Smart YH322
- 2 x 35mm Stepper motor
- 2 x Geeetech StepStick DRV8825
- 1 x Wired nunchuck controller for Wii
- 1 x Mini DC 7~28V to DC 5V step-down converter
- 1 x 11.1V 2200mAh 30C Li-polymer Battery
- 1 x B3AC 2S/3S Lipo balance charge