
Fonctionnement et programmation des composants
Fonctionnement et programmation des composants
1. Introduction à l'Arduino Nano
Qu'est-ce que l'Arduino ?
https://innovation.iha.unistra.fr/books/robotique-educative/page/quest-ce-que-larduino
2. Capteur à ultrasons HC-SR04
Qu'est ce qu'un capteur à ultrason et comment il fonctionne ?
https://innovation.iha.unistra.fr/books/robotique-educative/page/quest-ce-quun-capteur-a-ultrasons
3. Servomoteur SG90 180°
Qu'est ce qu'un servomoteur et comment il fonctionne ?
https://innovation.iha.unistra.fr/books/robotique-educative/page/quest-ce-quun-servo-moteur
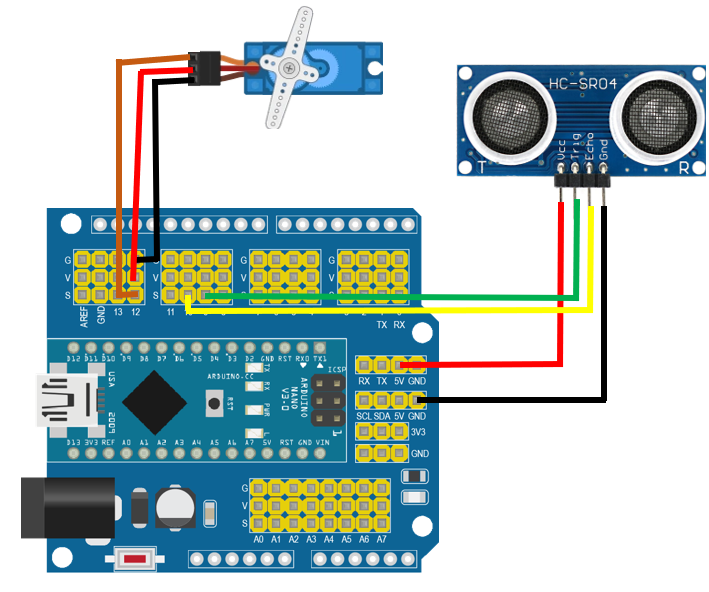
Explication du câblage complet
Maintenant que nous avons vu chaque composant individuellement, voici un résumé du câblage complet :
-
Capteur à ultrasons (HC-SR04) :
- VCC → 5V de l’Arduino
- GND → GND de l’Arduino
- TRIG → D9 de l’Arduino
- ECHO → D10 de l’Arduino
-
Servomoteur :
- VCC (fil rouge) → 5V de l’Arduino
- GND (fil noir) → GND de l’Arduino
- Signal (fil jaune) → D12 de l’Arduino
Conclusion et exercices pratiques
Synthèse :
- Nous avons vu comment l’Arduino Nano fonctionne avec un shield pour faciliter les connexions.
- Nous avons compris comment le capteur à ultrasons mesure des distances et comment nous allons utiliser ces informations pour contrôler un servomoteur.
- Le servomoteur répond à des signaux PWM pour se déplacer selon des angles précis.
Exercice pratique :
Pour terminer la séance, les participants peuvent reproduire le câblage décrit ci-dessus sur leur propre montage.
Correction de L'exercice :
Code à utiliser : Le code sera introduit dans la prochaine séance, mais vous pouvez donner un aperçu du fonctionnement et les amener à réfléchir sur la façon dont les composants vont interagir ensemble.