
Fonctionnement et programmation des composants
Objectif :
Comprendre le fonctionnement des composants du projet et apprendre à les programmer
1. Introduction à l'Arduino Nano
Qu'est-ce qu'une Arduino Nano ?
L’Arduino Nano est une petite carte électronique programmable basée sur un microcontrôleur. Elle permet de créer facilement des projets interactifs comme des systèmes automatisés, des robots ou des objets connectés. Grâce à sa taille compacte, son faible coût et sa compatibilité avec l’environnement Arduino, elle est trèsle utiliséecerveau du projet. c'est l'Arduino Nano qui décidera de faire tourner le servomoteur en fonction de la longueur mesuré par lesle débutantscapteur commed'ultrasons paren les professionnels pourexécutant le prototypageprogramme etque l’apprentissagevous delui l’électronique.avez imposé.
Poursi plusvous den'avez renseignementsjamais utilisé une Arduino Nano, rendez-vous sur cette page : https://innovation.iha.unistra.fr/books/robotique-educative/page/quest-ce-que-larduino
2. Capteur à ultrasons HC-SR04
Qu'est ce qu'un capteur à ultrason et comment il fonctionne ?
Le capteur à ultrasons HC-SR04 est un dispositif utilisé pour mesurer des distances sans contact. Il fonctionne en émettant une onde ultrasonore et en mesurant le temps mis par l’écho pour revenir après avoir heurté un obstacle. Simple à utiliser et peu coûteux, il estpermettra trèsa répandul'Arduino dansNano lesde projetsdétecter Arduino,votre notammentmain pourafin de donner un signal au servomoteur et ouvrir le couvercle de la détection d’obstacles, la mesure de niveau ou la robotique.poubelle.
Poursi plusvous den'avez renseignementsjamais utilisé un capteur à ultrasons, rendez-vous sur cette page : https://innovation.iha.unistra.fr/books/robotique-educative/page/quest-ce-quun-capteur-a-ultrasons
3. Servomoteur SG90 180°
Qu'est ce qu'un servomoteur et comment il fonctionne ?
Le servomoteur SG90 180° est un petit moteur électrique capable de se positionner avec précision sur un angle allant de 0 à 180 degrés. Il estpermettra courammentà notre poubelle d'ouvrir son couvercle grâce a la force exercé de celui-ci.
si vous n'avez jamais utilisé dans les projets Arduino pour contrôler des mouvements précis, comme l’orientation d’un bras, d’un capteur ou d’une roue. Léger, économique et facile à commander par signal PWM, il est idéal pour les projets de robotique et d’automatisation.
Pour plus de renseignementsservomoteur, rendez-vous sur cette page : https://innovation.iha.unistra.fr/books/robotique-educative/page/quest-ce-quun-servo-moteur
Explication du câblage complet
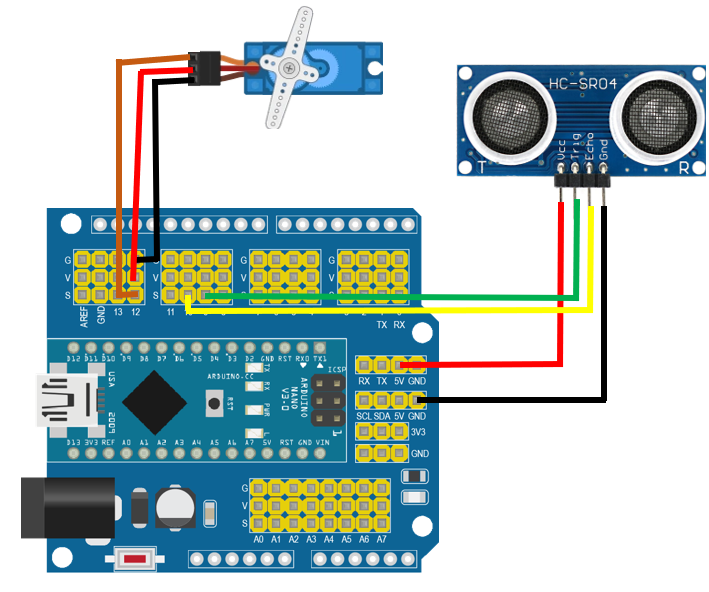
Maintenant que nous avons vu chaque composant individuellement, voici un résumé du câblage complet :
Capteur à ultrasons(HC-SR04) :VCC→ 5V de l’ArduinoGND→ GND de l’ArduinoTRIG→ D9 de l’ArduinoECHO→ D10 de l’Arduino
Servomoteur:VCC(fil rouge) → 5V de l’ArduinoGND(fil noir) → GND de l’ArduinoSignal(fil jaune) → D12 de l’Arduino
Conclusion et exercices pratiques
Synthèse :
Nous avons vu comment l’Arduino Nano fonctionne avec un shield pour faciliter les connexions.Nous avons compris comment le capteur à ultrasons mesure des distances.Nous avons compris comment fonctionne le servomoteur et comment le contrôler.
Exercice pratique :
Pour terminer la séance, les participants peuvent reproduire le câblage décrit ci-dessus sur leur propre montage.
Correction de L'exercice :
Code à utiliser : Le code sera introduit dans la prochaine séance, mais vous pouvez donner un aperçu du fonctionnement et les amener à réfléchir sur la façon dont les composants vont interagir ensemble.