
Phase 1 - Assemblage des Composants et Introduction à la Modélisation 3D
Phase 1 - Conception
Compétences techniques:
- Assembler des composants électroniques et utiliser un logiciel de modélisation 3D.
- Modéliser une boîte adaptée pour contenir les composants.
- Travailler en groupe et présenter les solutions conçues.
Savoir-être, compétences transversales:
-
Travail individuel et collectif.
-
Lire un tutoriel détaillé.
Déroulement de la séance:
-
Consignes: Sécurité, précautions matériel:
-
Travail individuel.
-
Rappel: Tout est fragile.
-
-
Phases et méthodes d’animation:
-
Présentation de l'activité du jour ( Présentation de l'Arduino et des composants utilisé durant la séance : https://innovation.iha.unistra.fr/books/robotique-educative/page/quest-ce-que-larduino ).
-
Importance de la modélisation 3D dans le projet.
- Objectifs rappelés.
-
- Assemblage des Composants:
Fonctionnement du DHT22:
Le capteur DHT22 est un dispositif utilisé pour mesurer la température et l'humidité de l'air. Il fonctionne grâce à deux composants principaux : un thermistor pour la mesure de la température et un capteur capacitif pour l'humidité.
-
Température : Le thermistor, qui change de résistance en fonction de la température, permet de mesurer celle-ci avec une précision d'environ ±0.5°C dans une plage de -40°C à 80°C.
-
Humidité : Le capteur capacitif d'humidité détecte les variations dans la capacité électrique causées par l'humidité dans l'air, offrant une précision d'environ ±2 à 5% pour une humidité relative comprise entre 0% et 100%.
Le DHT22 communique les données via une seule broche numérique (data). Après une courte initialisation, il envoie les informations sous forme de bits, codées dans un protocole spécifique. L'appareil peut être interrogé à des intervalles d'environ 2 secondes, car il a une période de rafraîchissement des données assez lente.
Ce capteur est populaire pour sa simplicité d'utilisation, notamment avec des microcontrôleurs comme Arduino ou Raspberry Pi, et est très utilisé dans des projets de domotique ou de surveillance de l'environnement.
-
- Distribution des Composants : Fournir les cartes Arduino Nano, Shields, capteurs DHT22, et piles accus à chaque groupe.
- Essai en Autonomie : Les élèves assemblent les composants selon les instructions. L'enseignant aide si nécessaire.
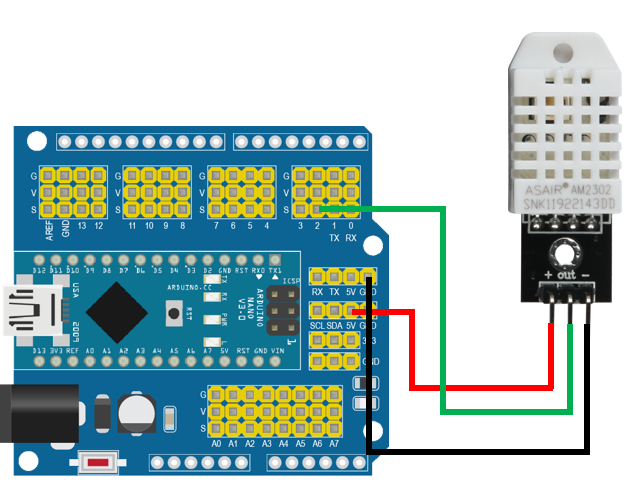
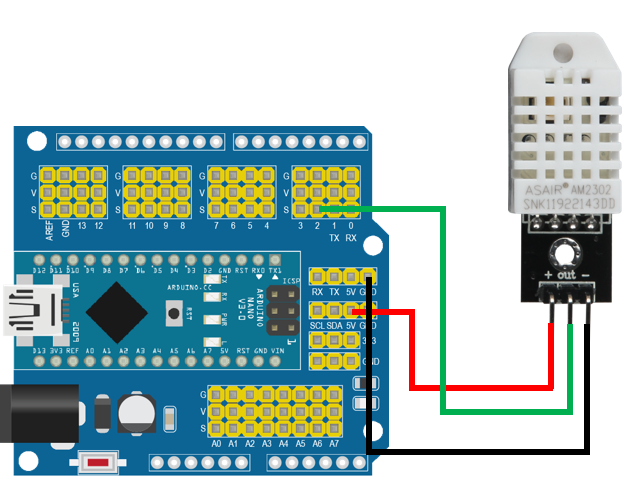
- Explication de l'Assemblage : Montrer les différentes broches du capteur DHT22, comment le connecter au Shield et comment alimenter le système avec la pile accu.
- Câblage :
- VCC(+) sur une pin 5V.
- DAT(out) sur le pin 2 S.
- GND(-) sur une pin GND
- Et par la suite dès que vous aurez programmer la carte vous pourrez branchez une batterie pour que votre station fonctionne.
- Prendre en main le logiciel TinkerCad:
- Présentation de l'Outil de Modélisation : Introduction rapide à un logiciel de modélisation 3D comme Tinkercad.
- Démonstration : Montrer comment créer une forme de base pour la boîte et ajouter des ouvertures pour les composants.
- Exercice Pratique : Les élèves réalisent un exercice simple pour se familiariser avec les outils de modélisation ( ici faire le tuto : https://innovation.iha.unistra.fr/books/2-fablab-activites-logiciels/page/initiation-3d-tinkercad ).
- La conception du fichier :
-
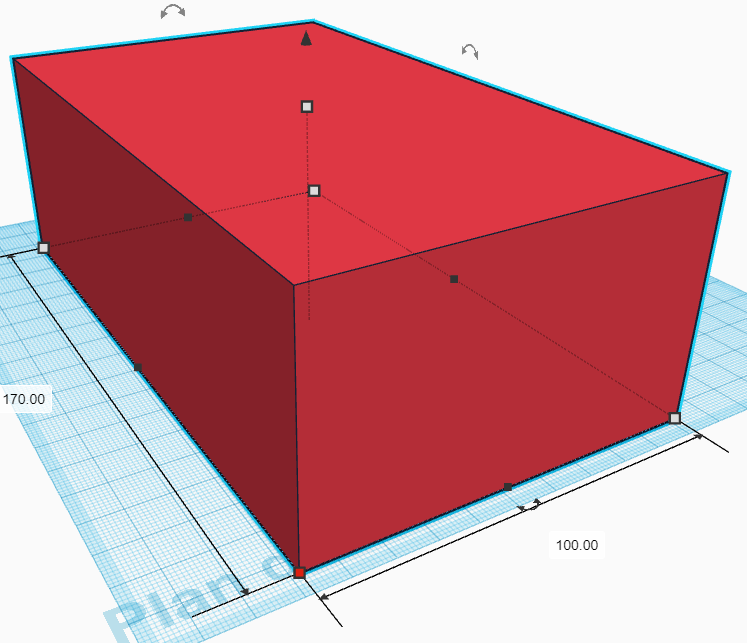
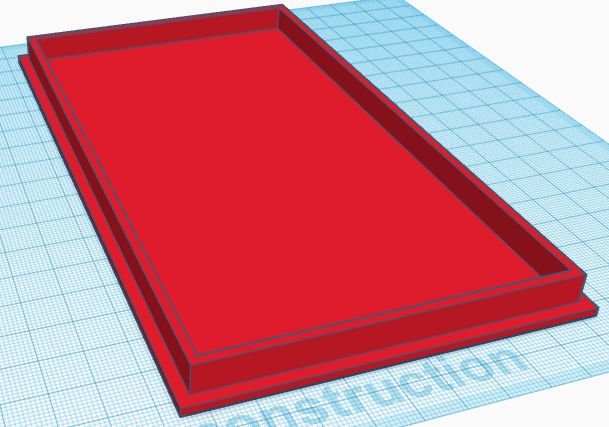
- Création du Boîtier Principal:
-
Ouvrir TinkerCad et démarrer un nouveau projet.
-
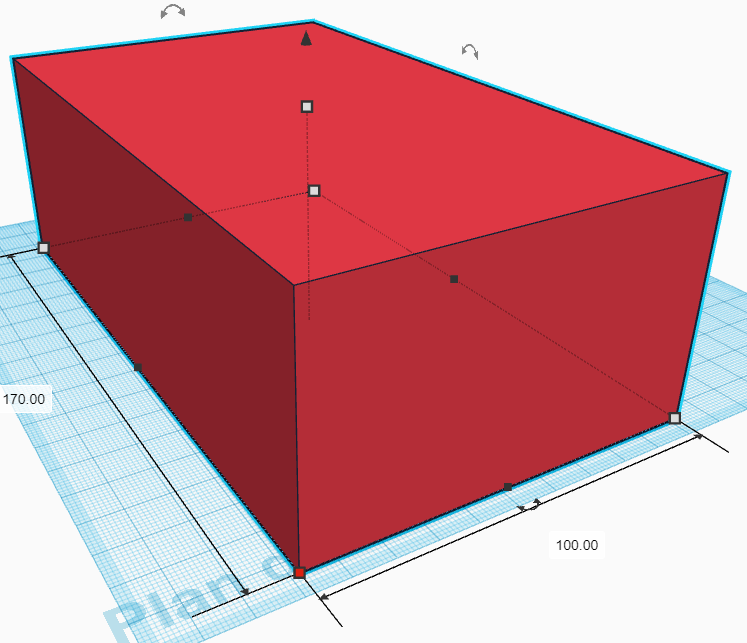
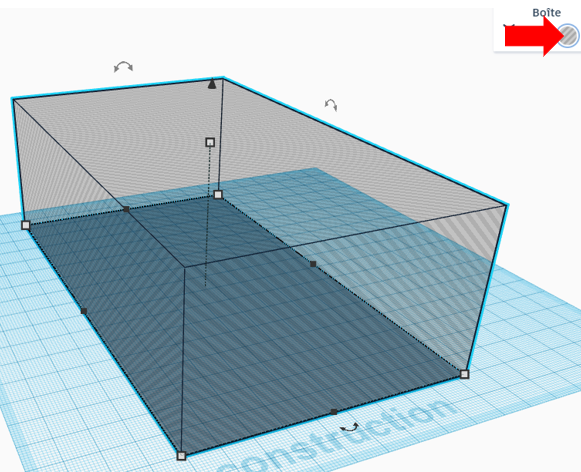
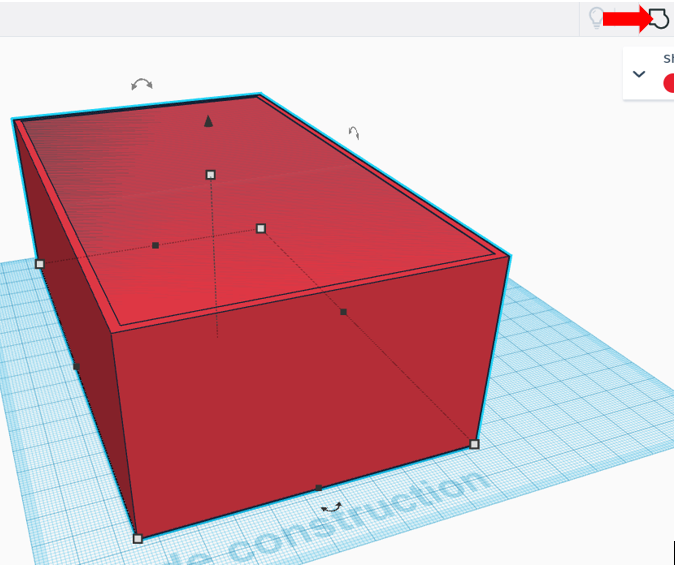
Placer un cube de base de 12*9*5 cm depuis la bibliothèque d'objets.
-
-
Ajouter un deuxième cube de 11.8*8.8*4.8 cm (Ne pas oublier à le convertir en perçage!).
-
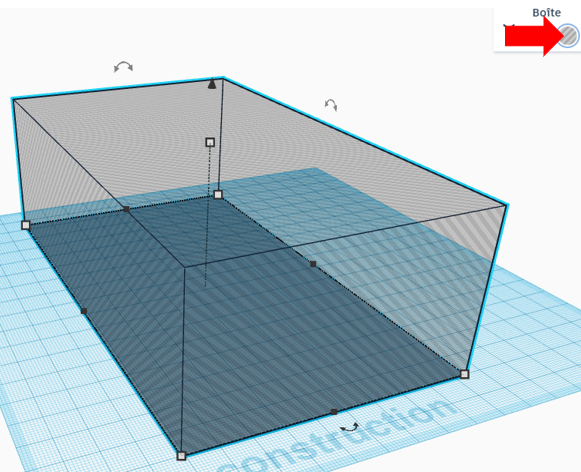
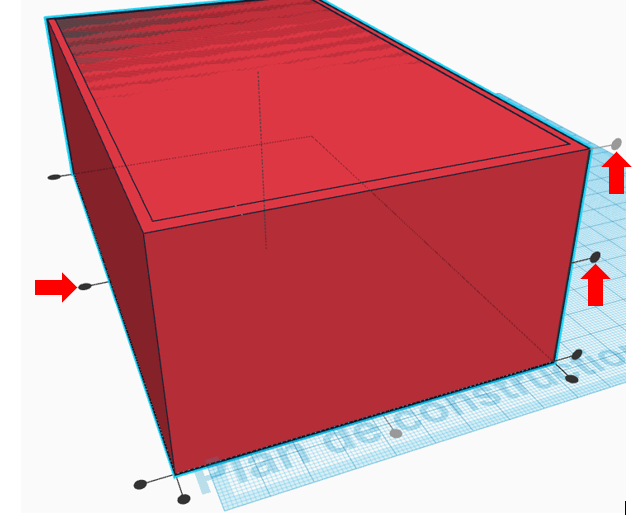
- Venir centrer le 2ème cube au premier en sélectionnant les 2 cubes puis appuyez sur ce bouton

- Et ensuite appuyer sur ces 3 points noir.
-
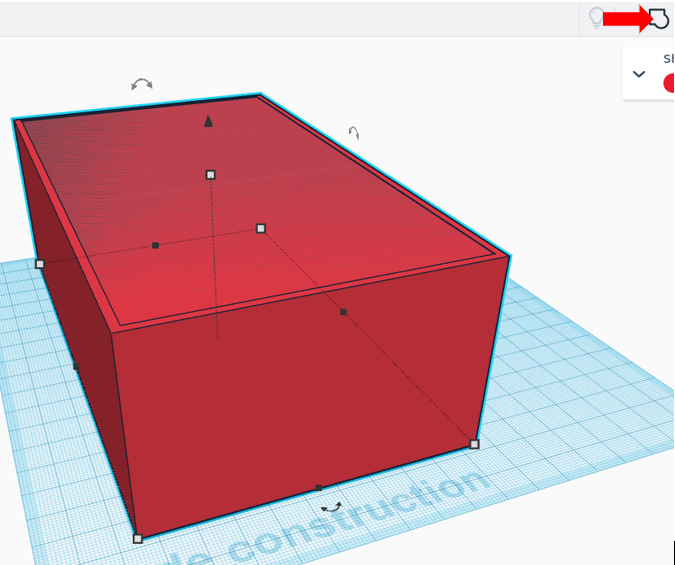
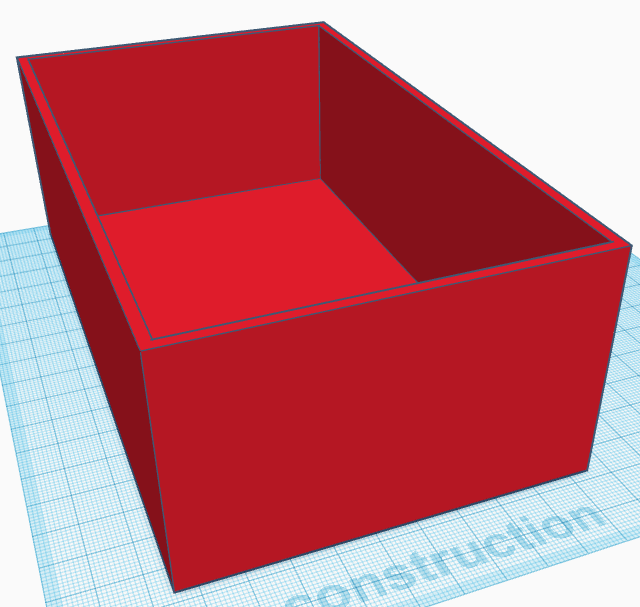
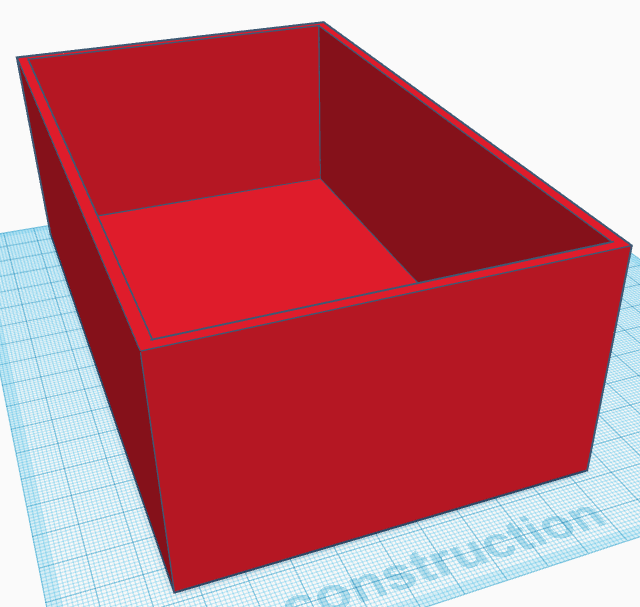
Venir percer le deuxième cube au premier (Bien sélectionner les 2 cubes en même temps).
-


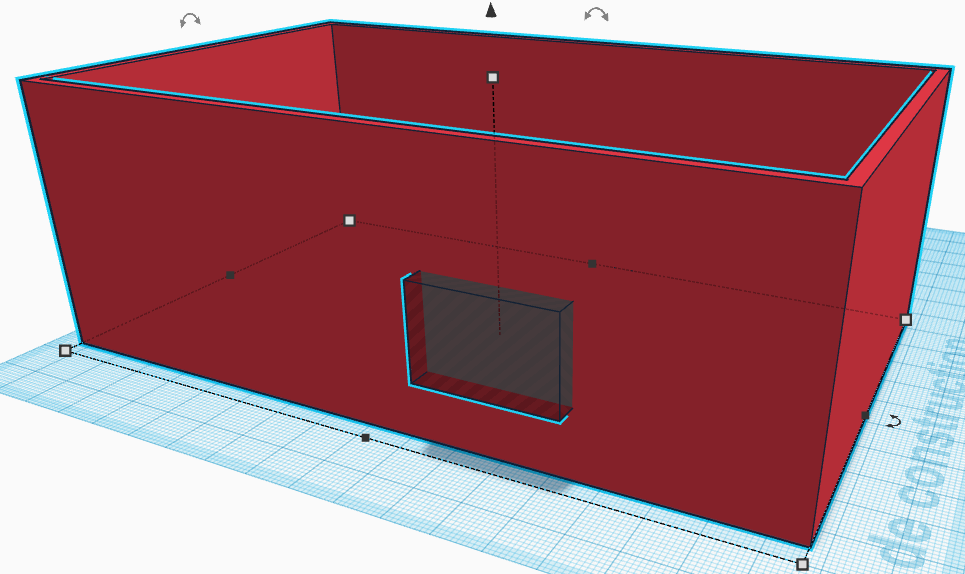
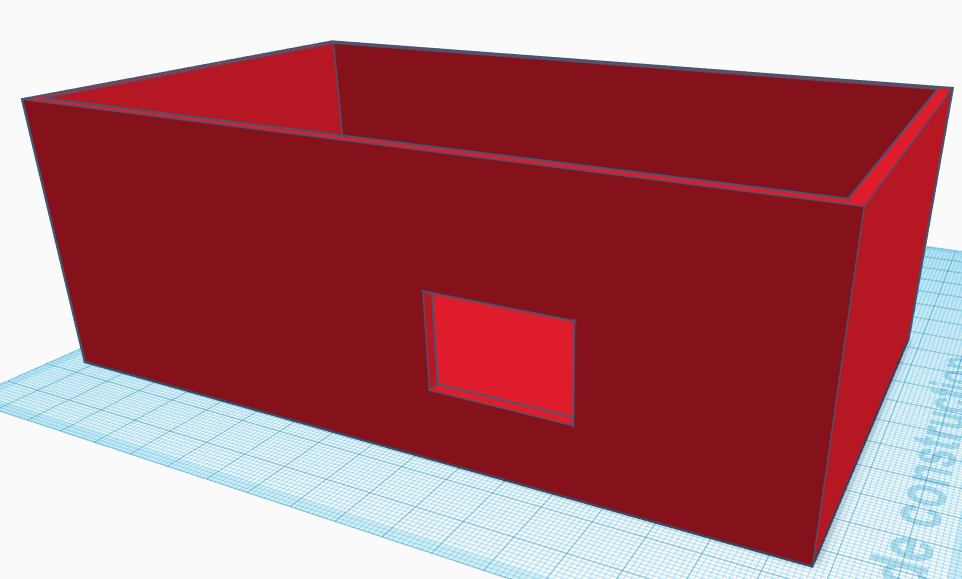
Création du Passage pour le Capteur:
- Créer un cube de 2*2*1.5 cm.
- Puis venir percer une paroi latéral de la boîte avec l'outil utiliser comme précédemment.
-
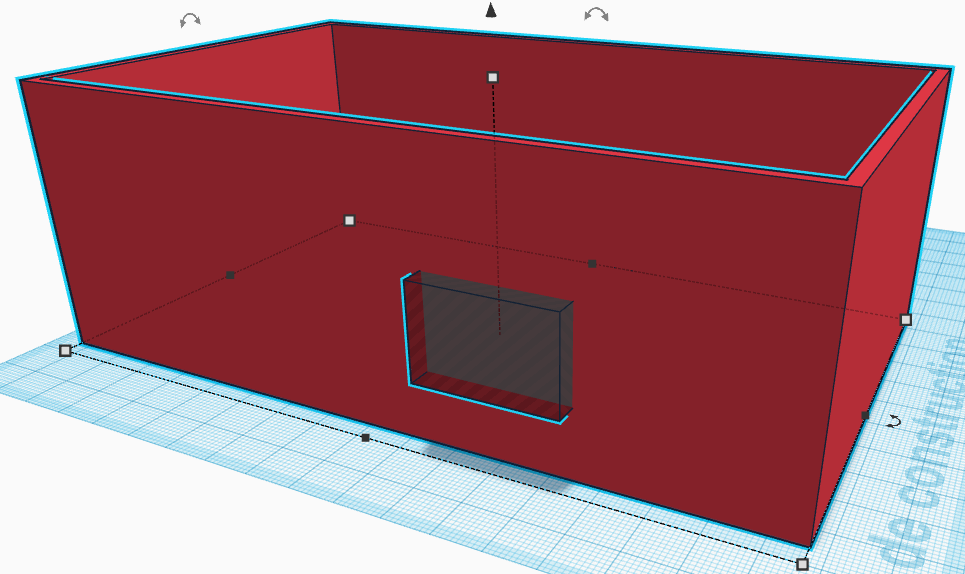
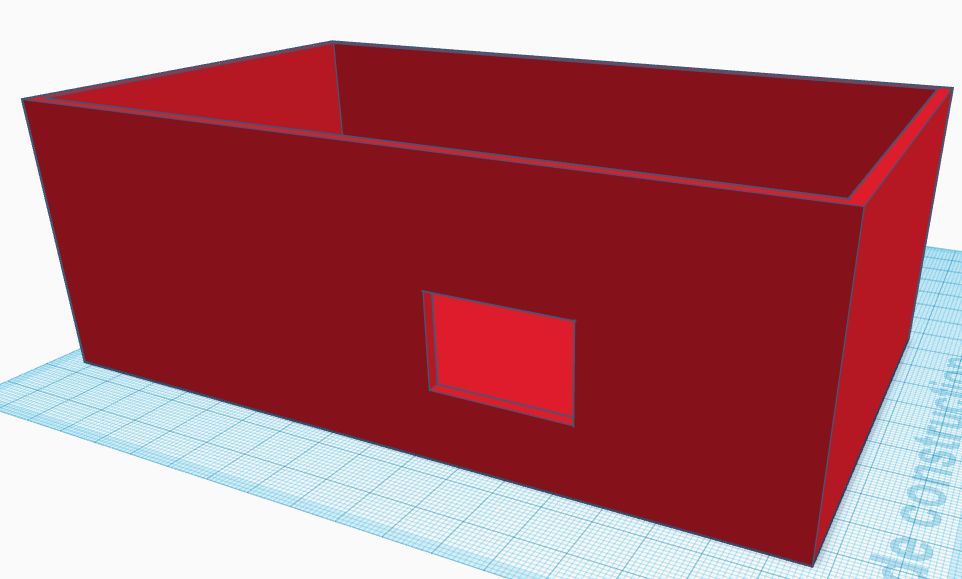
- Placer le trou à l'emplacement souhaité pour le passage du capteur.
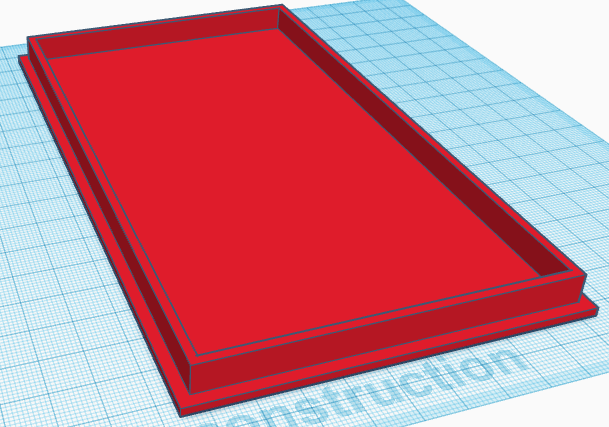
Conception du Capot:
- Créer un nouveau cube de 11.8*8.8*0.3 cm.
- Ajouter un deuxième cube de 11.6*8.6*0.3 cm en mode perçage et venir percer ce dernier au premier grâce à l’outil "perçage".
- Puis ensuite ajouter un cube en dessous de 12*9*0.1 cm.
-
Ajustements Finaux:
-
Vérifier l'alignement du capot avec le boîtier principal.
-
Ajuster la position du capot pour qu'il puisse se fermer correctement.
-
Réviser les dimensions et l'agencement global pour assurer la cohérence du design.
Validation et Export:
- Vérifier visuellement la modélisation en 3D pour s'assurer de la conformité avec les spécifications.
- Exporter le modèle au format souhaité pour une utilisation ultérieure (STL, etc.).
Conclusion / Rangement / Démontage:
- Retour sur les notions clés de la séance.
- Q&R pour clarifier les doutes.
- Rangement en fin de séance.
- Éteindre les PC.