
Programmation du LittleBot
Le Programme en Mblock :
Objectifs :
Le robot doit tout le temps avancer sauf si il rencontre un obstacle à moins de 10 cm il doit reculer puis tourner vers la gauche.
Tout d'abord commençons par ajouter les extensions que nous auront besoin, dans la barre des extensions taper "ultrasons" et ajouter l'extension (il y en aura que une) et pour la 2ème extensions la voici servo.mext (faire un glisser-déposer).
Dès que les 2 extensions sont installées on peut commencer à programmer.
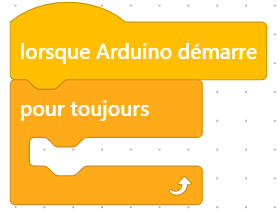
Mettre le bloc d'évènement pour pouvoir jouer le code.

Ensuite mettre le bloc "pour toujours" pour faire une boucle infinie.
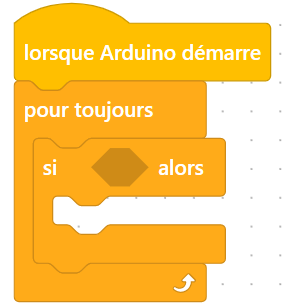
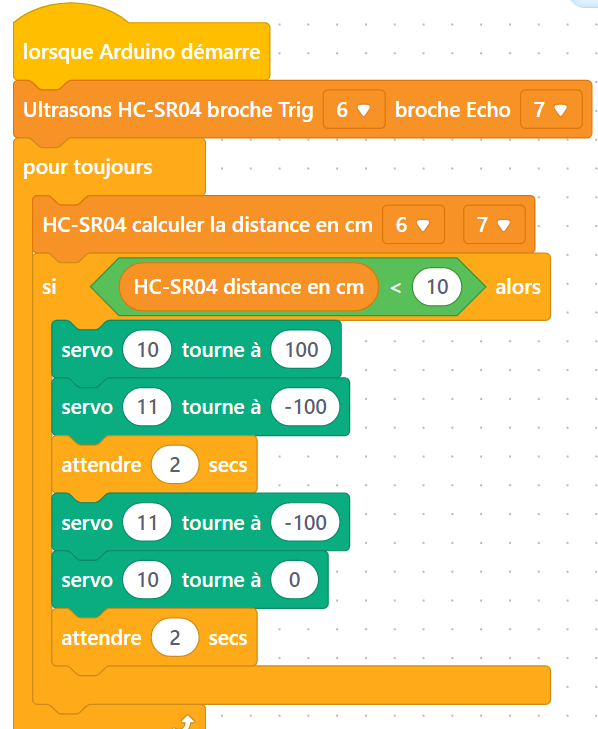
Mettre le bloc de conditions "si ... alors ...".
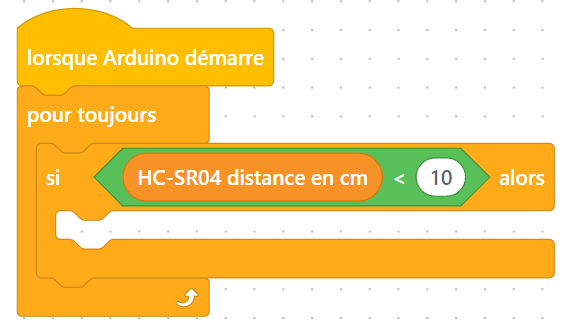
Maintenant on va réaliser la condition.
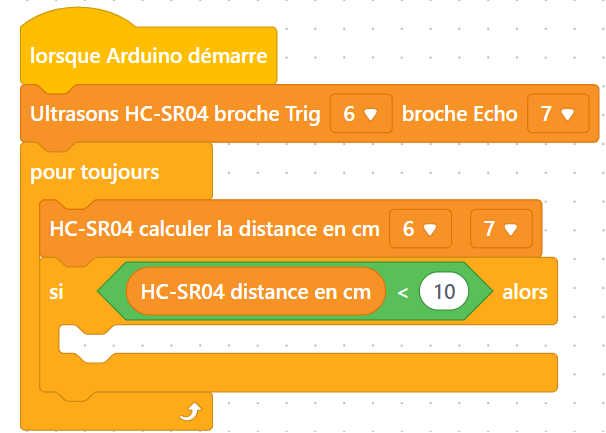
Ne pas oublier d'initialiser notre capteur de distance et de calculer la distance en continue.
Maintenant si la condition est correct alors il doit d'abord reculer pendants 2 secondes puis tourner à gauche pendant 2 sec.
Les valeurs 100 et -100 sont les vitesse maximale dans un sens différent.
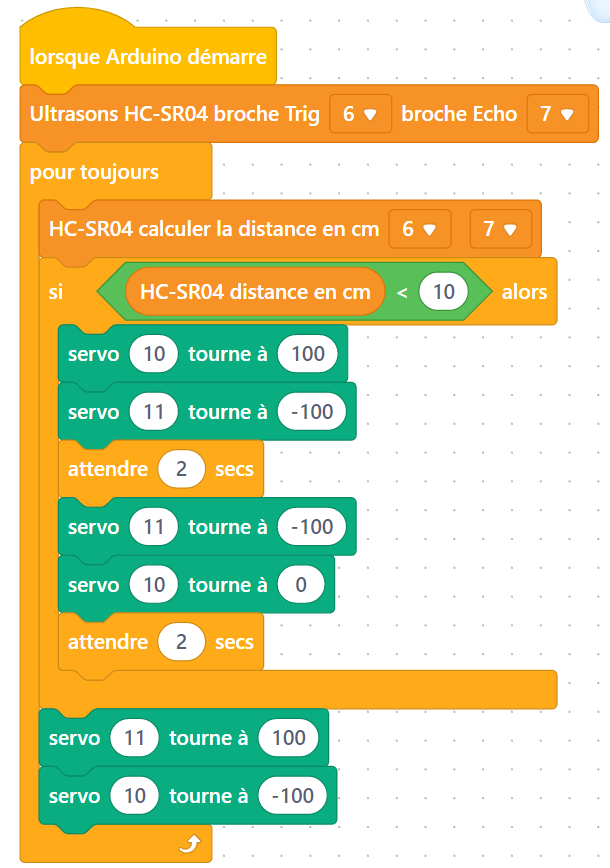
Rajouter les 2 dernier blocs pour que si la condition n'est pas réalisée le robot avance.
Programmation sur Arduino IDE :
Ici nous décomposerons notre programme pour bien l'écrire.
Tout d'abord, nous déclarons la librairie et les servoservomoteurs que nous utiliserons :
#include <Servo.h>
#define trigPin 6
#define echoPin 7
Servo servo1;
Servo servo2;Puis nous déclarons sur quelles pins sont branchés nôtrenotre capteur et nos servosservomoteurs :
void setup() {
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
servo1.attach(11);
servo2.attach(10);
}Rentrons dans le vif du sujet :
void loop() {
long duration, distance; // Nous déclarons notre variable que nous retrouverons plus tard
digitalWrite(trigPin, LOW); //Ici notre capteur à ultrason est en "position 0"
delayMicroseconds(2); // Pendant 2 Microsecondes
digitalWrite(trigPin, HIGH); //Ici notre capteur à ultrason est "activé"
delayMicroseconds(10); //Pendant 10 Microsecondes
digitalWrite(trigPin, LOW); //Puis nous le retournons en position "0"
duration = pulseIn(echoPin, HIGH); // Nous déclarons notre variable "duration" qui est la durée du trajet du son.
distance = (duration*0.034) / 2; // Nous déclarons notre variables "distance" par la duréé multiplié par la vitesse du son le tout divisé par 2.
if (distance < 20) { // Nos déplacement commence ici, "Si la distance est inférieur à 20cm alors..."
servo1.writeMicroseconds(1000);//Servo Gauche tourne à l'envers
servo2.writeMicroseconds(2000);//Servo Droit tourne à l'envers
delay (2000);// pendant 2 sec
servo1.writeMicroseconds(1000);//Servo Gauche tourne à l'envers
servo2.writeMicroseconds(1500);//Arrêt du Servo Droit
delay (2000);// pendant 2 sec
}
else { //Sinon...
servo1.writeMicroseconds(2000);//Servo Gauche tourne
servo2.writeMicroseconds(1000);//Servo Droit tourne
delay (2000);// pendant 2 sec
}
}Puis nous assemblons le tout, voici à quoi cela devrait ressembler :
#include <Servo.h>
#define trigPin 6
#define echoPin 7
Servo servo1;
Servo servo2;
void setup() {
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
servo1.attach(11);
servo2.attach(10);
}
void loop() {
long duration, distance;
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
duration = pulseIn(echoPin, HIGH);
distance = (duration*0.034) / 2;
if (distance < 20) {
servo1.writeMicroseconds(1000);
servo2.writeMicroseconds(2000);
delay (2000);
servo1.writeMicroseconds(1000);
servo2.writeMicroseconds(1500);
delay (2000);
}
else {
servo1.writeMicroseconds(2000);
servo2.writeMicroseconds(1000);
delay (2000);
}
}