
Animation LittleBot (2h30)
🛠️Introduction
🟨 Étape 1 :– Découverte de mBlock et contrôle d'un servomoteur RC 360°
🧩 1. Présentation de mBlock
mBlock est un logiciel de programmation qui utilise des blocs colorés qu’on assemble comme des briques de LEGO.
Il est basé sur Scratch, mais adapté pour programmer des robots comme le LittleBot.
👉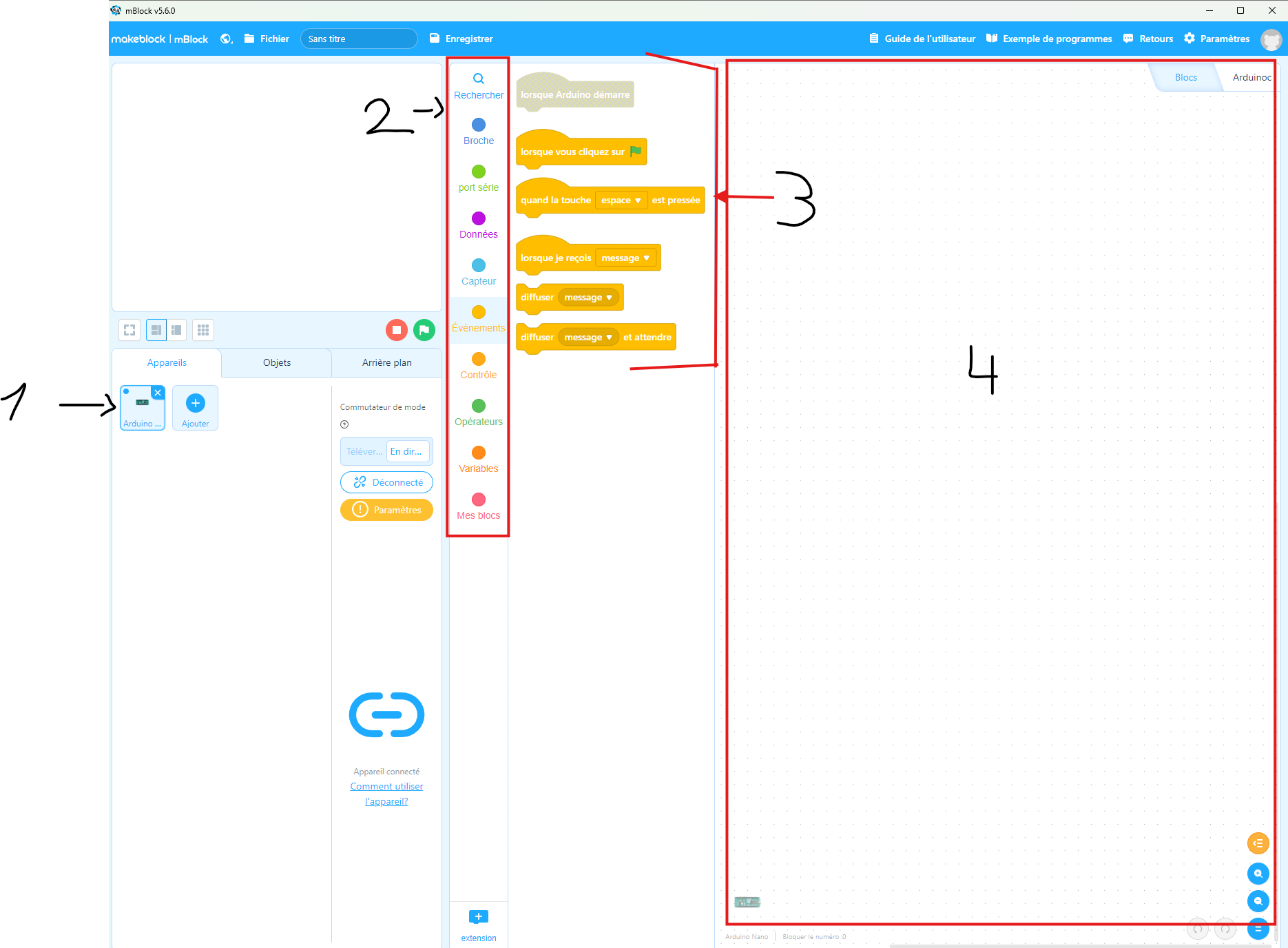
1) programmerAppareil que nous programmons, ici nous sommes avec un Arduino nano
2) Catégorie de bloc de programmation
3) Bloc de programmation
4) Interface de dépôt de bloc pour la programmation
🟩 Étape 2 – Qu’est-ce qu’un Arduino Nano ?
🧠 C’est quoi un Arduino Nano ?
Un Arduino Nano est une petite carte électronique :
C’est le
LittleBot« cerveau » du robot.
Il reçoit des instructions depuis l’ordinateur (grâce à mBlock), et il contrôle les moteurs et les capteurs du robot…
Dans le LittleBot, l’Arduino Nano permet de :
-
OuvreLiremBlock,lespuisinformationssélectionnedu"Arduinocapteurnano"àdansultrasonsappareils(ex : distance), -
CliqueContrôlersurles"Ajouterrouesunegrâceextension"auxpourservomoteurs,ajouter -
Exécuter des
blocs supplémentairesactions (commeavancer,lesreculer,servomoteurs ou les capteurs)s’arrêter…).
🧠 On peut dire que tu écris un programme avec mBlock et que l’Arduino le suit à la lettre.
🔄 Qu’est-ce qu’un servomoteur RC 360° ?
Un servomoteur RC 360° (ou « continu ») est un petit moteur qui peut tourner en continu dans les deux sens (comme une roue), contrairement aux servos classiques qui ne tournent que sur un angle limité (en général 180° maximum).
⚙️ À quoi ça sert dans un robot comme le LittleBot ?
Dans le LittleBot, ces servos sont utilisés pour faire tourner les roues du robot. En envoyant des signaux différents, on peut :
-
Faire avancer le robot (les deux roues tournent en avant),
-
Faire reculer le robot (les deux roues tournent en arrière),
-
Faire tourner (une roue avance, l’autre recule ou reste fixe).
🎛️ Comment on contrôle la vitesse et le sens ?
🛑 Étape 2 : Détecter un obstacle avec le capteur à ultrasons