
Animation LittleBot (2h30)
Introduction
🟨 Étape 1 – Découverte de mBlock
🧩 1. Présentation de mBlock
mBlock est un logiciel de programmation qui utilise des blocs colorés qu’on assemble comme des briques de LEGO.
Il est basé sur Scratch, mais adapté pour programmer des robots comme le LittleBot.
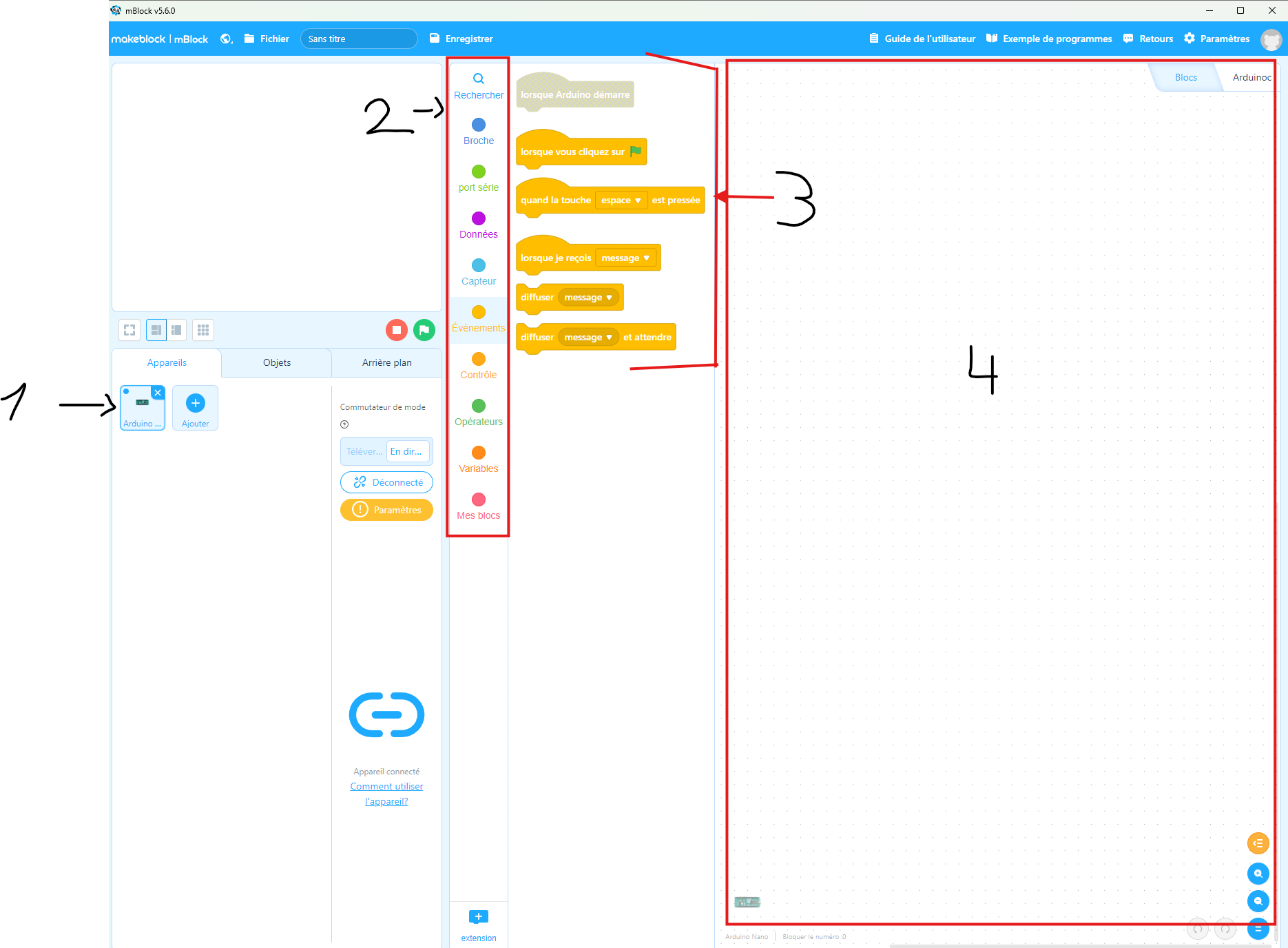
1) Appareil que nous programmons, ici nous sommes avec un Arduino nano
2) Catégorie de bloc de programmation
3) Bloc de programmation (à glisser dans l'interface de dépôt de bloc pour la programmation)
4) Interface de dépôt de bloc pour la programmation
🟩 Étape 2 – Qu’est-ce qu’un Arduino Nano ?
🧠 C’est quoi un Arduino Nano ?
Un Arduino Nano est une petite carte électronique :

C’est le « cerveau » du robot.
Il reçoit des instructions depuis l’ordinateur (grâce à mBlock), et il contrôle les moteurs et les capteurs du robot…
Dans le LittleBot, l’Arduino Nano permet de :
-
Lire les informations du capteur à ultrasons (ex : distance),
-
Contrôler les servomoteurs,
-
Exécuter des actions (avancer, reculer, s’arrêter…).
🧠 On peut dire que tu écris un programme avec mBlock et que l’Arduino le suit à la lettre.
🟦 Étape 3 – Qu’est-ce qu’un servomoteur RC 360° ?
🔄 Qu’est-ce qu’un servomoteur RC 360° ?
Un servomoteur RC 360° (ou « continu ») est un petit moteur qui peut tourner en continu dans les deux sens (comme une roue), contrairement aux servos classiques qui ne tournent que sur un angle limité (en général 180° maximum).
⚙️ À quoi ça sert dans un robot comme le LittleBot ?
Dans le LittleBot, ces servos sont utilisés pour faire tourner les roues du robot. En envoyant des signaux différents, on peut :
-
Faire avancer le robot (les deux roues tournent en avant),
-
Faire reculer le robot (les deux roues tournent en arrière),
-
Faire tourner (une roue avance, l’autre recule ou reste fixe).
🎛️ Comment on contrôle la vitesse et le sens ?
Pour commencer un programme, on commence toujours par le bloc 'lorsque Arduino démarre'
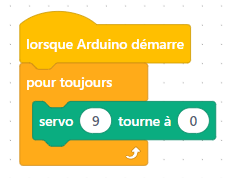
Ensuite, on va indiquer à l'Arduino nano que l'on veut que notre programme fonctionne tout le temps grâce au bloc 'pour toujours' dans la catégorie 'Contrôle'.

Et maintenant, nous allons faire fonctionner notre servomoteur. Allez dans la catégorie 'Servo360' et prendre le bloc 'servo 9 tourne à 0'.
Comment fonctionne ce bloc ?
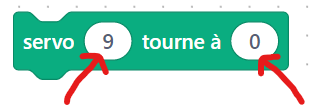
Numéro de broche vitesse du servomoteur, dans un sens entre [-100 et 0[ et dans l'autre entre ]0 et 100]). A 0 on est donc à l'arrêt
Attention ce bloc ne contrôle qu'un seul moteur, nos servomoteurs sont branchés sur les broches numéros 11 et 10.
Comment téléverser le code dans l'arduino nano?
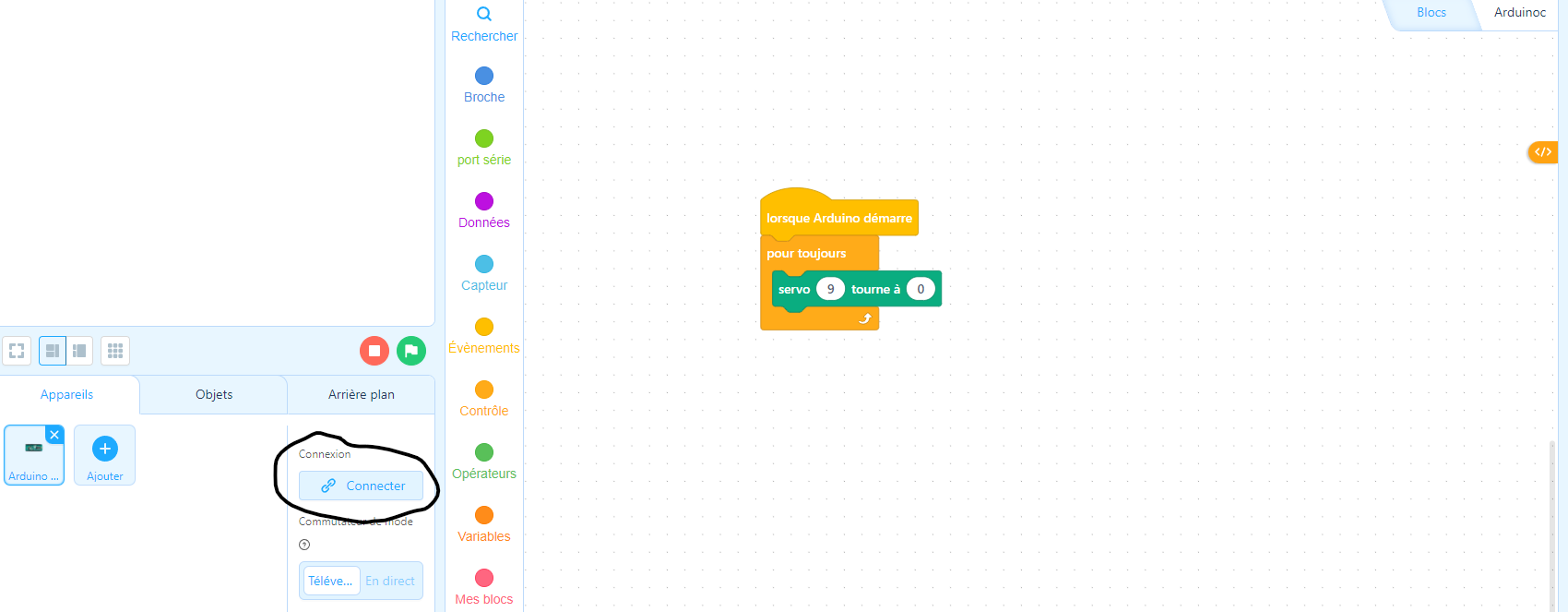
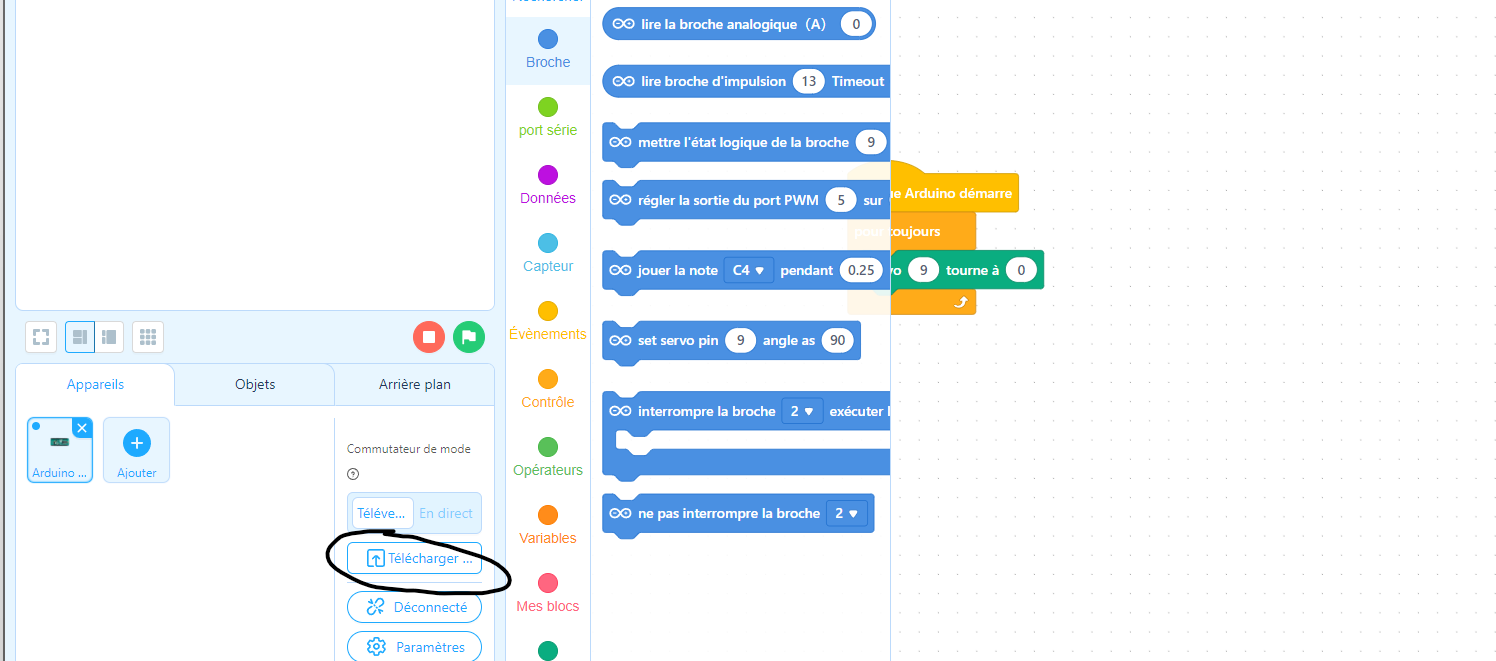
Sélectionner un appareil disponibles, si le programme ne se téléverse pas vous n'aurez cas vous déconnecter de l'appareil que vous avez choisis et essayer avec un autre. Cliquer sur 'Connecter' puis 'Télécharger le code'.

Chaque exercice est à faire valider par un animateur
Exercice n°1 :
Faire bouger les deux servomoteurs
Exercice n°2 :
Faire bouger les deux servomoteurs dans le même sens afin que le robot aille vers l'avant
Exercice n°3 :
Faire avancer le robot pendant quelques secondes, et le faire faire revenir.