
Montage et Câblage du LittleBot
Le montage :
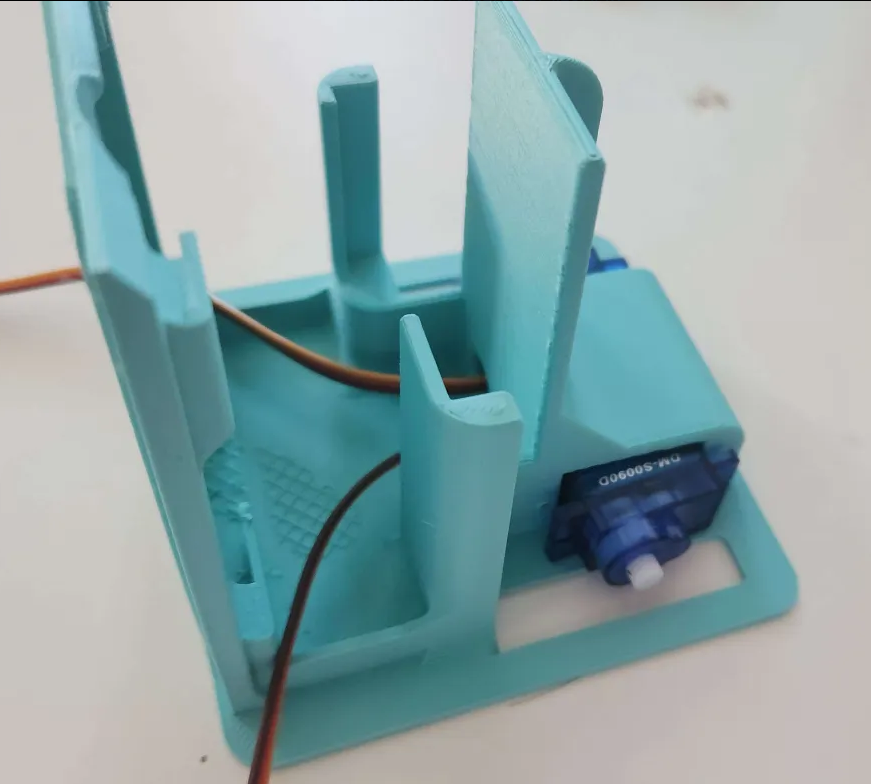
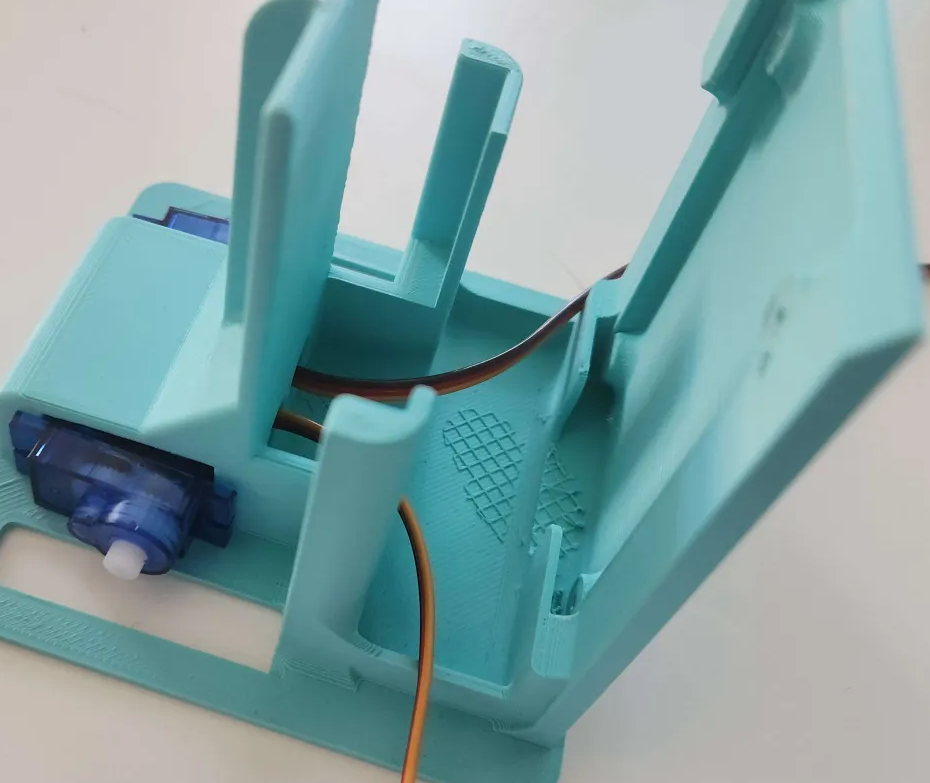
Etape 1 :
Placer les servomoteur dans la base du LittleBot se référer aux images ci-dessous.
Attention!!! Bien mettre l'axe des servomoteurs au milieu du trou pour la roue.
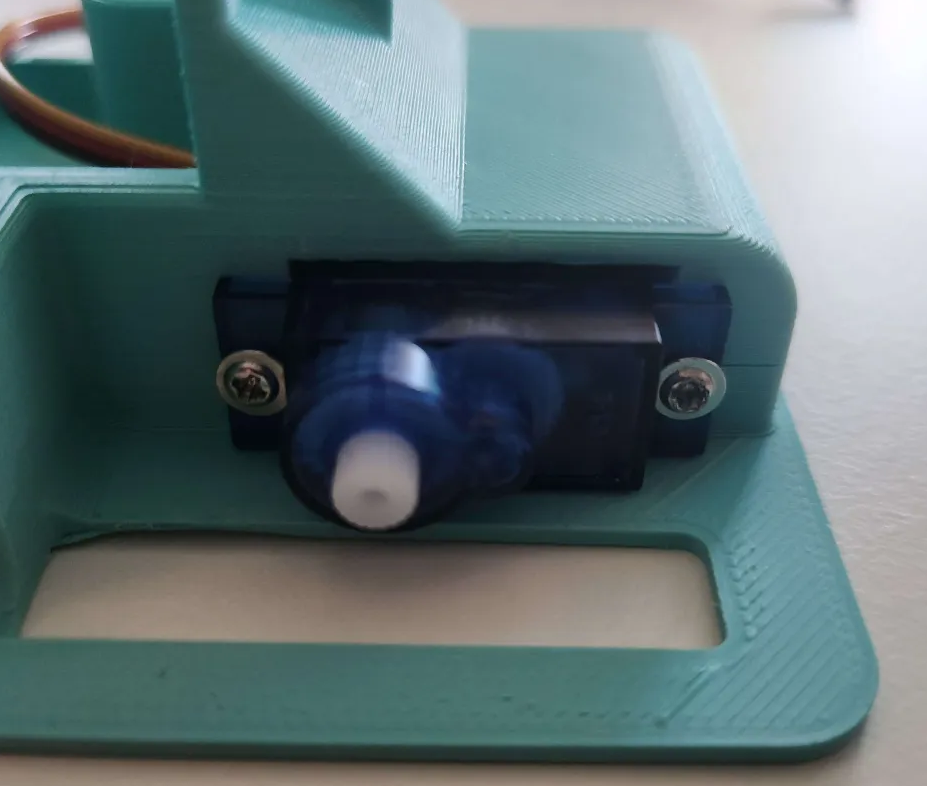
Etape 2 :
Viser les servomoteurs.
Maintenant nous allons passer au câblage du robot, car si on continue de monter il y aura quelques complications pour brancher certains composants.
Le câblage :
Pour le câblage et la programmation du LittleBot, il nous faut :
- Un Arduino Nano (ou équivalant)
- Un Sensor Shield
- Un capteur à ultrason (HC-SR04)
- 2 Servomoteur / Moteur (DM-S0090D)
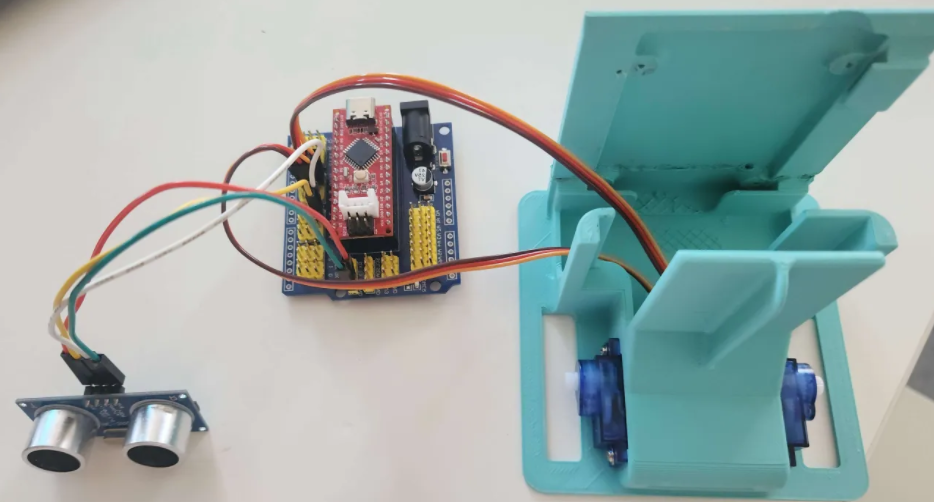
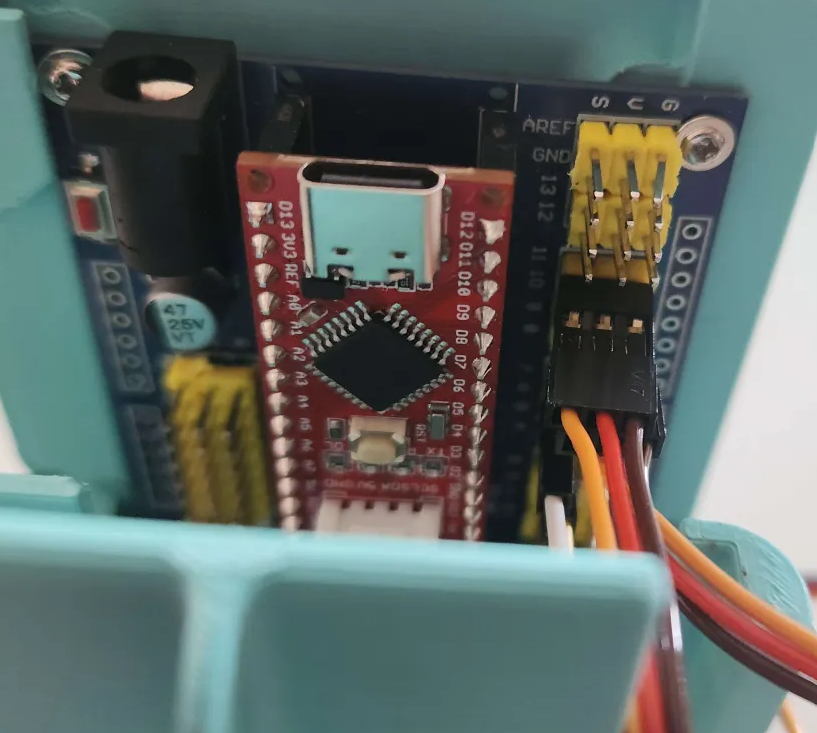
Le branchement ce présente comme ceci :
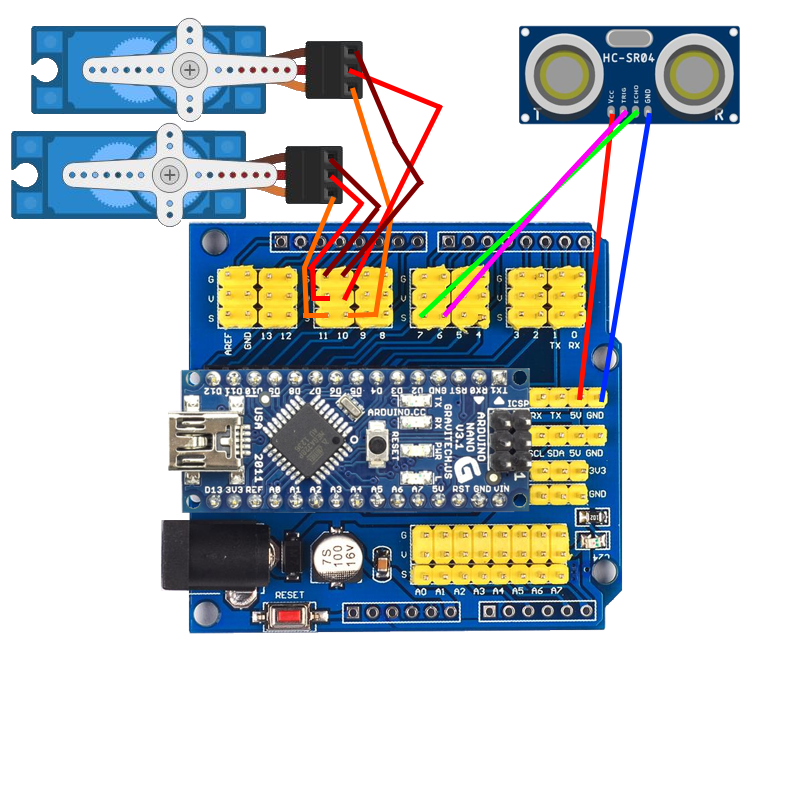
- Tout d'abord nous branchons l'Arduino Nano sur notre Sensor Shield. Attention, il y a un sens. Le port de charge doit être sur l'extérieur de votre Shield.
- Nous allons a présent brancher notre capteur à ultrason :
- VCC sur une broche 5V.
- Trig sur la broche 6.
- Echo sur la broche 7.
- GND sur une broche GND
3. Nous allons brancher nos Servomoteurs, les câbles de nos servos sont tous reliés à un raccord. Celui ci ne peut être branché que dans un seul sens. Nous brancherons donc un servo sur la broche 10 et un servo sur la broche 11.
- Le fil marron sur la broche G
- Le fil rouge sur la broche V
- Le fil orange sur la broche S
Ainsi le servo qui est sur la broche 10 sera notre roue droite et le Servo sur la pin 11 sera notre roue gauche.
Votre câblage est terminé.
PassonsDès maintenantque vous avez comme l'image ci-dessous nous pouvons de nouveau passer au montage.
Le montage :
Etape 3 :
Fixer le shield à la programmation.base du LittleBot avec 2 vis.
Etape 4 :
Mettre les palonniers dans les roues.

Puis fixer les palonniers sur les servomoteurs.


Etape 5 :
Placer le capteur ultrasons dans le tête du LittleBot

Et maintenant placer la tête du LittleBot
Le programme :
Ici nous décomposerons notre programme pour bien l'écrire.
Tout d'abord, nous déclarons la librairie et les servo que nous utiliserons :
#include <Servo.h>
#define trigPin 6
#define echoPin 7
Servo servo1;
Servo servo2;Puis nous déclarons sur quelles pins sont branchés nôtre capteur et nos servos :
void setup() {
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
servo1.attach(11);
servo2.attach(10);
}Rentrons dans le vive du sujet :
void loop() {
long duration, distance; // Nous déclarons notre variable que nous retrouverons plus tard
digitalWrite(trigPin, LOW); //Ici notre capteur à ultrason est en "position 0"
delayMicroseconds(2); // Pendant 2 Microsecondes
digitalWrite(trigPin, HIGH); //Ici notre capteur à ultrason est "activé"
delayMicroseconds(10); //Pendant 10 Microsecondes
digitalWrite(trigPin, LOW); //Puis nous le retournons en position "0"
duration = pulseIn(echoPin, HIGH); // Nous déclarons notre variable "duration" qui est la durée du trajet du son.
distance = (duration*0.034) / 2; // Nous déclarons notre variables "distance" par la duréé multiplié par la vitesse du son le tout divisé par 2.
if (distance < 20) { // Nos déplacement commence ici, "Si la distance est inférieur à 20cm alors..."
servo1.writeMicroseconds(1000);//Servo Gauche tourne à l'envers
servo2.writeMicroseconds(2000);//Servo Droit tourne à l'envers
delay (2000);// pendant 2 sec
servo1.writeMicroseconds(1000);//Servo Gauche tourne à l'envers
servo2.writeMicroseconds(1500);//Arrêt du Servo Droit
delay (2000);// pendant 2 sec
}
else { //Sinon...
servo1.writeMicroseconds(2000);//Servo Gauche tourne
servo2.writeMicroseconds(1000);//Servo Droit tourne
delay (2000);// pendant 2 sec
}
}Puis nous assemblons le tout, voici à quoi cela devrait ressembler :
#include <Servo.h>
#define trigPin 6
#define echoPin 7
Servo servo1;
Servo servo2;
void setup() {
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
servo1.attach(11);
servo2.attach(10);
}
void loop() {
long duration, distance;
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
duration = pulseIn(echoPin, HIGH);
distance = (duration*0.034) / 2;
if (distance < 20) {
servo1.writeMicroseconds(1000);
servo2.writeMicroseconds(2000);
delay (2000);
servo1.writeMicroseconds(1000);
servo2.writeMicroseconds(1500);
delay (2000);
}
else {
servo1.writeMicroseconds(2000);
servo2.writeMicroseconds(1000);
delay (2000);
}
}