
Montage et Câblage du LittleBot
Etape 1 : Montage des Servomoteurs
Placez les servomoteurs dans la base du LittleBot en vous référant aux images ci-dessous.
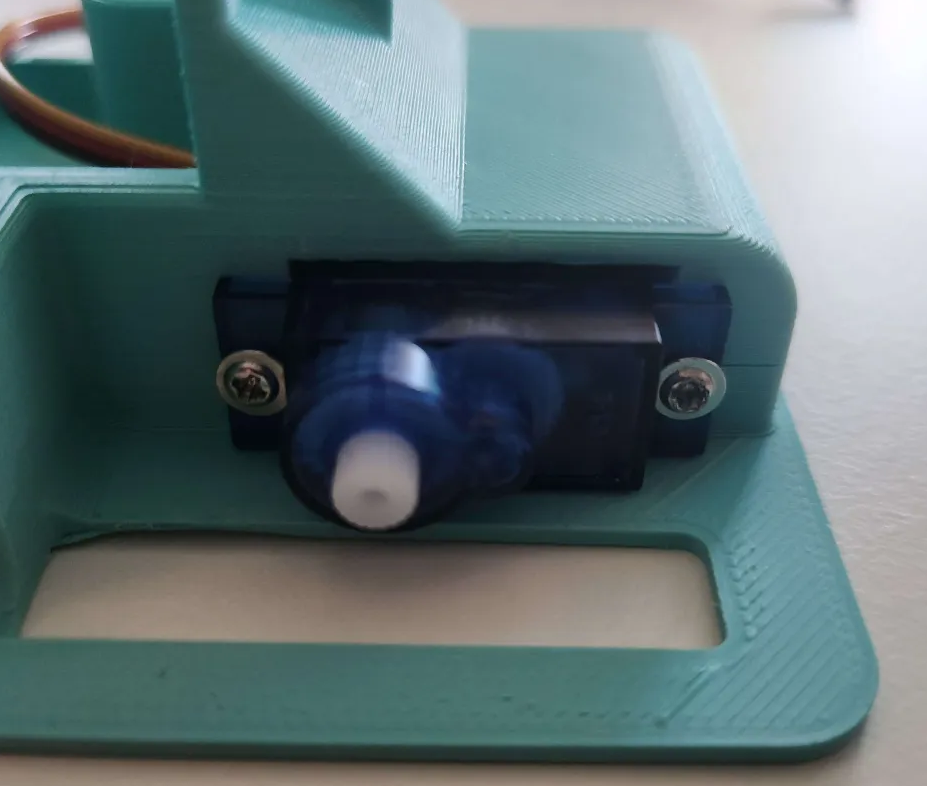
⚠️ Attention : veillez à ce que l’axe des servomoteurs soit bien centré dans le trou prévu pour la roue.
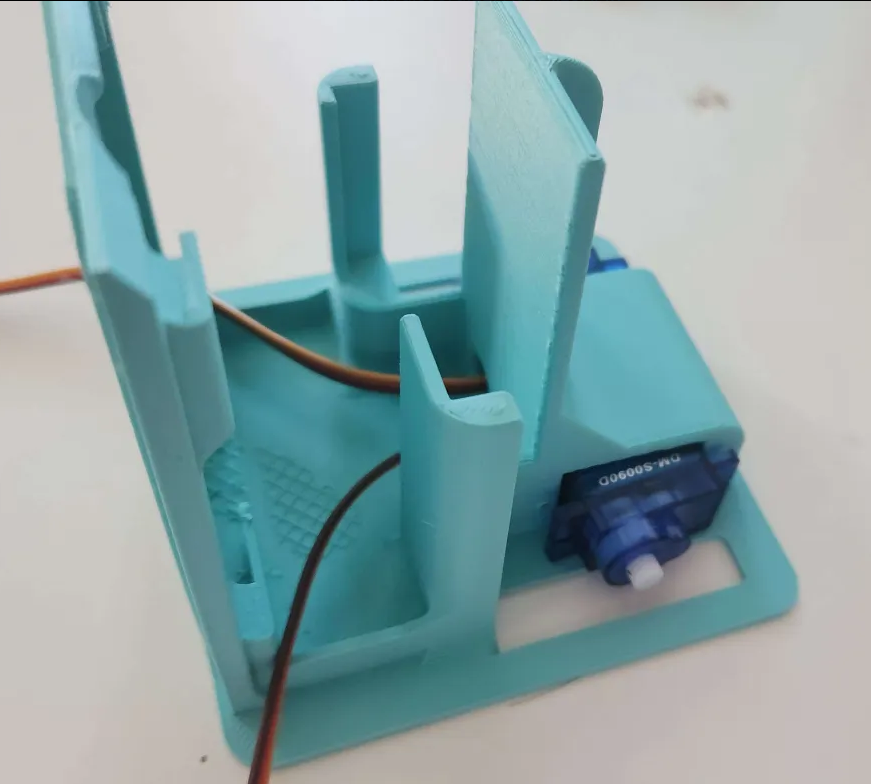
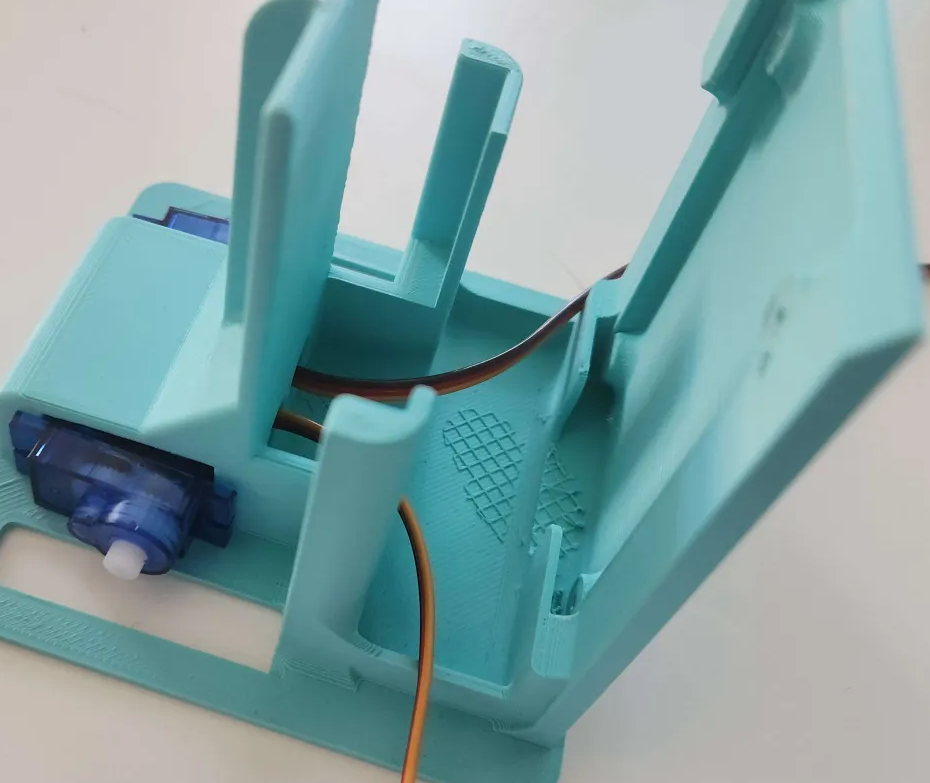
Visser les servomoteurs.
Nous allons maintenant passer au câblage du robot, car continuer le montage sans cette étape pourrait compliquer le branchement de certains composants.
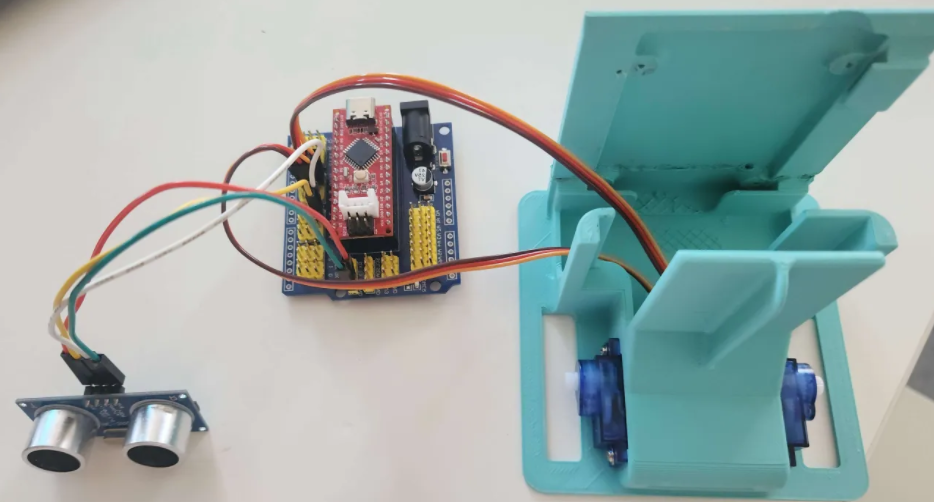
Etape 2 : Câblage des Composants
Pour le câblage du LittleBot, il nous faut :
- Un Arduino Nano
- Un Sensor Shield
- Un capteur à ultrason (HC-SR04)
- 2 Servomoteurs RC 360°/ Moteur (DM-S0090D)
Le branchement ce présente comme ceci :
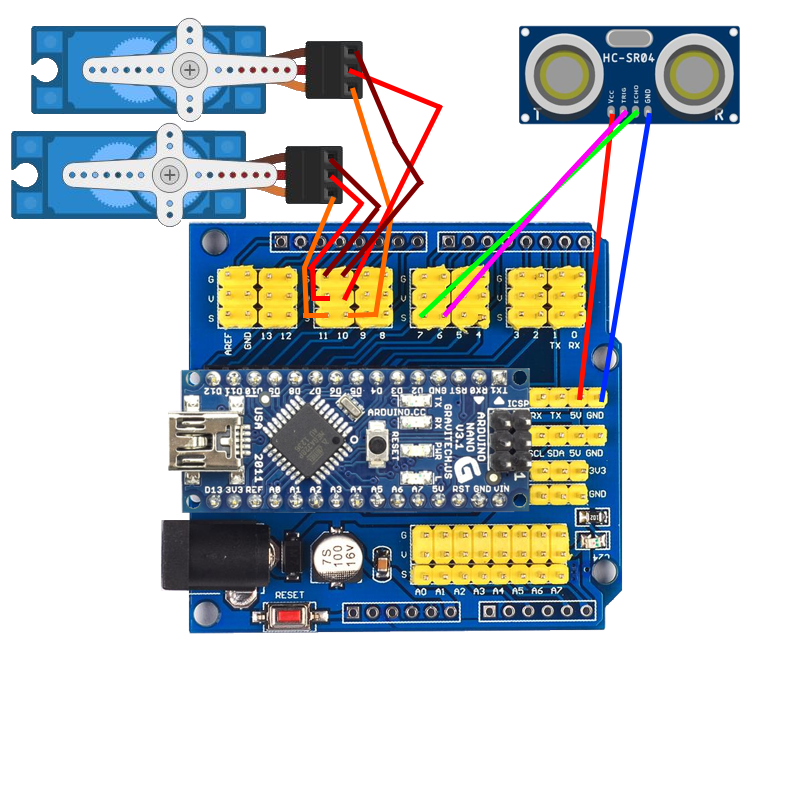
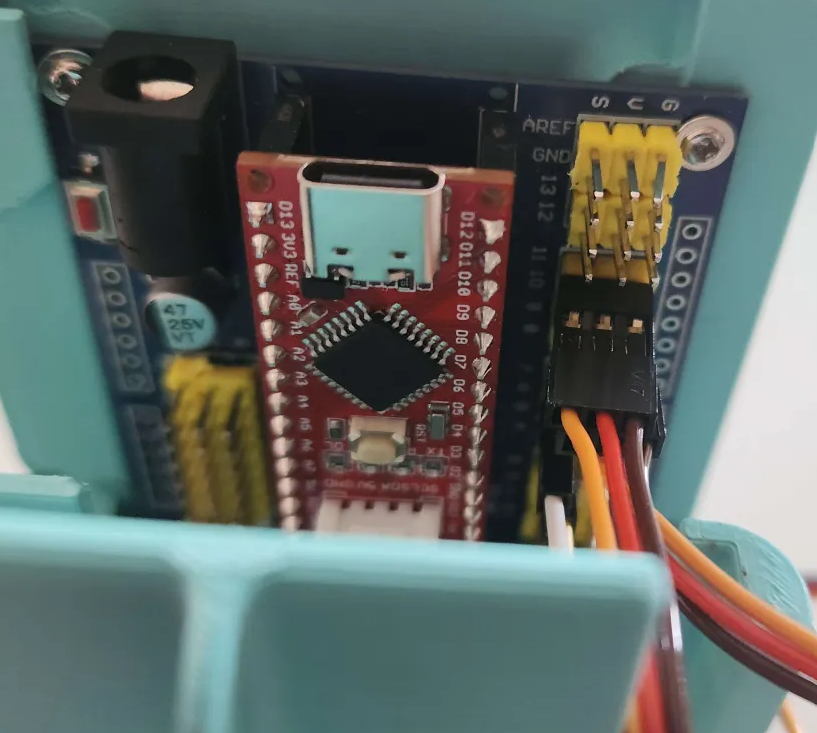
⚠️ Attention à bien vous référer aux inscription des pins pour brancher l'Arduino nano dans le bon sens (port usb vers l'extérieur du shield).
- Branchement du capteur à ultrasons (se référer au schéma du dessus) :
- VCC sur une broche 5V.
- Trig sur la broche 6.
- Echo sur la broche 7.
- GND sur une broche GND
2. Branchement des Servomoteurs RC 360° (se référer au schéma du dessus) :
- Le fil marron sur la broche G
- Le fil rouge sur la broche V
- Le fil orange sur la broche S
Ainsi le servo qui est sur la broche 10 sera notre roue droite et le Servo sur la pin 11 sera notre roue gauche.
Etape 3 : Montage du shield
Fixer le shield à la base du LittleBot avec 2 vis.
Etape 4 : Fixation des roues
Mettre les palonniers dans les roues.

Puis fixer les roues sur les servomoteurs.


Etape 5 : Finalisation du LittleBot
Mettre la batterie comme sur l'image ci-dessous et ne pas oublier de passer le câble dans le trou de la tête.
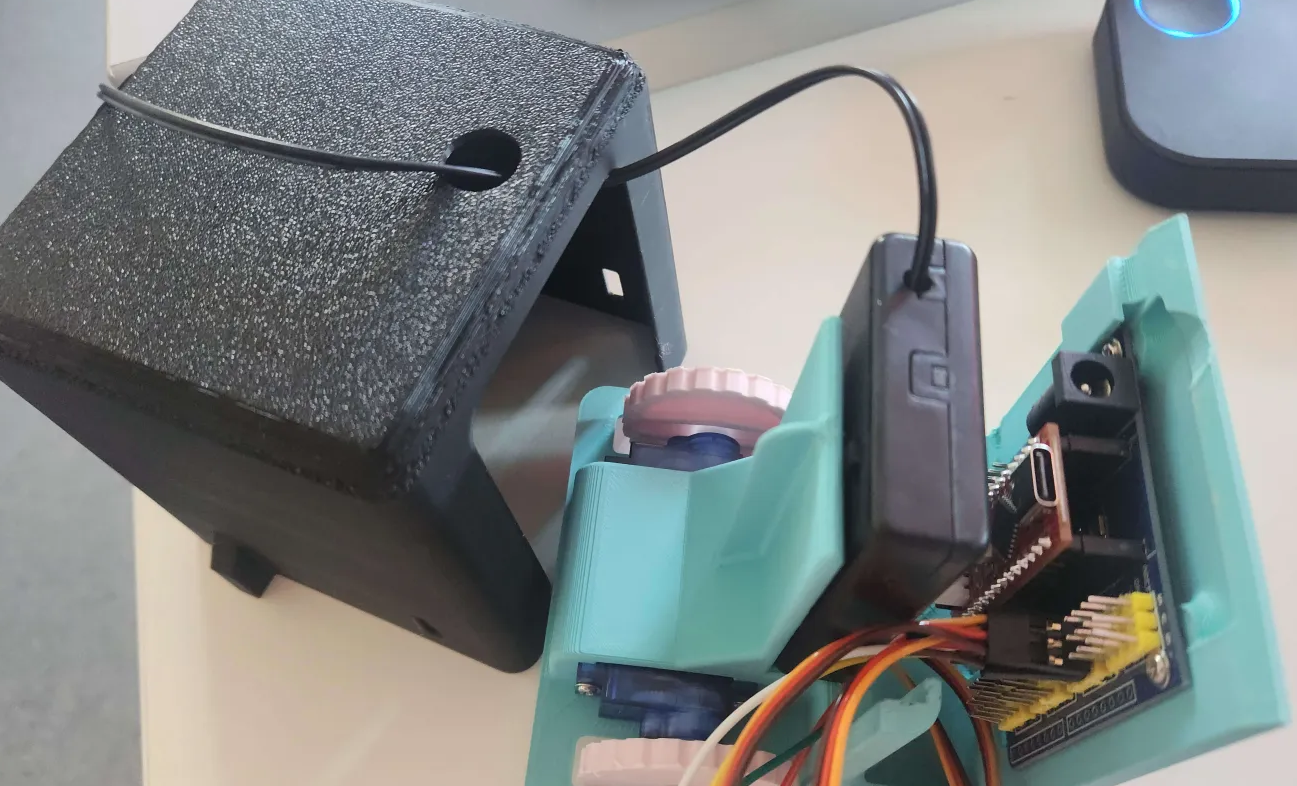
Placer le capteur ultrasons dans le tête du LittleBot

Placer la tête du LittleBot sur la base.

Passons maintenant à la programmation sur la prochaine page.
No Comments